Founded in 2012, GeoSLAM is a provider of mobile scanning solutions with proprietary high-productivity simultaneous localization and mapping (SLAM) software to create 3D models for use in digital twin applications.
The addition of GeoSLAM is expected to significantly expand and accelerate Faro’s market growth in the mobile scanning space.
“We are thrilled to add GeoSLAM’s handheld 3D scanning technology to our portfolio of cutting-edge data capture solutions,” said Michael Burger, Faro president and CEO. “Faro now offers the industry’s broadest set of 4D data-capture solutions, including 360° camera-based images, mobile scanning and stationary high-accuracy laser scanning, allowing customers to balance the need for accuracy, speed and detail depending on their requirements. These capture technologies provide the foundation for our 4D digital-reality-based SaaS (software-as-a-service) offering that will allow customers to access multiple 4D data sources for visualization and analysis through a single user experience. We welcome the GeoSLAM team to our Faro family.”
“Joining with Faro represents the next step in the growth of GeoSLAM and the establishment of mobile mapping as a driver for growth in the way businesses map and understand their spaces,” said Andy Parr, GeoSLAM CEO. “Both companies share a vision of the importance of mobile scanning in the burgeoning digital reality capture market.”
GeoSLAM reported £14.5 million in revenue with 18% EBITDA in the fiscal year ending March 31, 2022. EBITDA, a non-GAAP measure, is calculated as net income/loss before interest (income) expense, net, income tax expense (benefit), foreign exchange rate variance, and depreciation and amortization. The transaction closed on Sept. 1, funded with available cash reserves and equity consideration.
Under terms of the agreement, GeoSLAM shareholders received a cash payment of £22.0 million and 495,562 shares of Faro stock subject to customary lock-up provisions. Faro expects the acquisition to be accretive to Non-GAAP EPS in 2023.
Faro serves the markets of architecture, engineering and construction (AEC); facility operations and maintenance; 3D metrology; and public safety analytics.
Flyability has unveiled the Elios 3, a collision-tolerant drone equipped with a lidar sensor for indoor 3D mapping. The drone is powered by a new SLAM engine called FlyAware that lets it create 3D models as it flies.
It also is accompanied by a new version of Flyability’s software for inspectors, Inspector 4.0.
The launch of the Elios 3 marks a new partnership with GeoSLAM. The Elios 3 comes with an Ouster OS0-32 lidar sensor, allowing inspectors to collect data for the creation of survey-grade 3D models using software from GeoSLAM.
The drone gives users real-time digital replicas of previously inaccessible areas with the inclusion of the lidar sensor and GeoSLAM’s Connect software. The drone is protected by a cage and has advanced collision-tolerance features that allow inspectors to fly it inside dangerous confined spaces such as boilers, pressure vessels and mines.
With its integration with Connect, the Elios 3 creates survey-grade point clouds. Fitted to the back of the drone, the lidar sensor maps the environment in real time using Flyability’s FlyAware SLAM algorithm.
Survey package option
Those that need highly accurate data can upgrade to the survey package, provided by GeoSLAM, providing access to the Connect software, as well as specialist Volumes and Draw modules. Powered by GeoSLAM’s established SLAM algorithm, Connect offers a simple and automated way to process point cloud data.
Using the survey package, data is processed to an accuracy of 8 mm, suitable for mapping hazardous environments such as mines and industrial applications including chimneys, production plants, warehouses, silos and tanks. Processed data can then be viewed in the easy-to-use 3D viewer and exported to industry-standard file types including LAZ, LAS, PLY and TXT for use in third-party software.
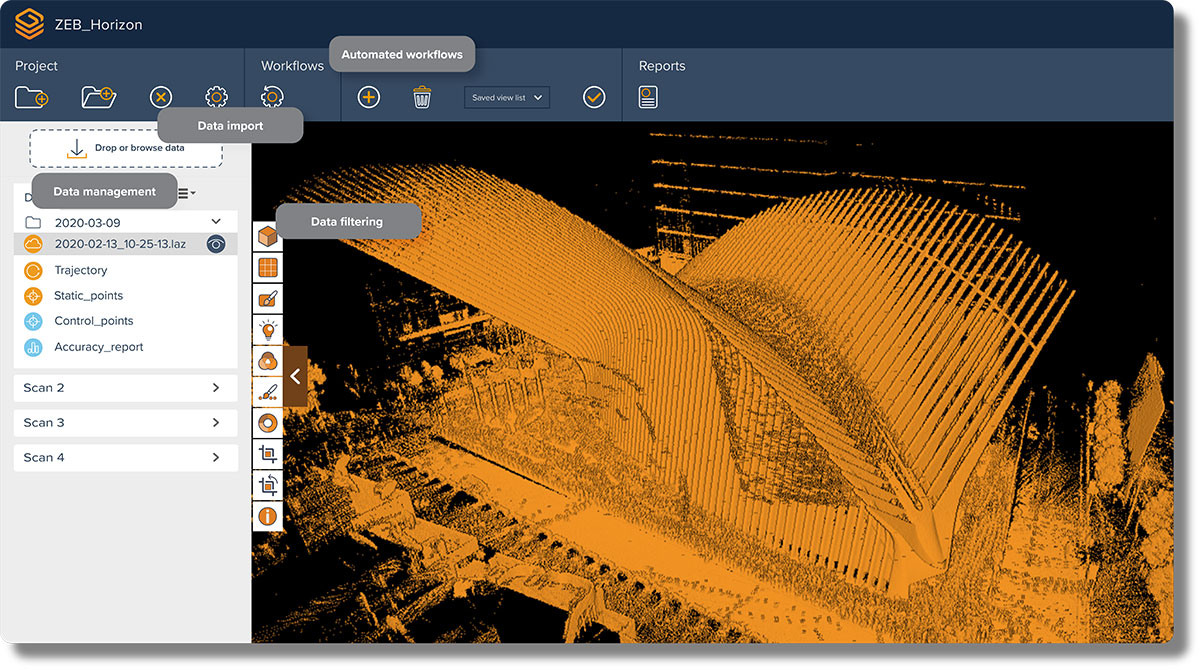
Colorization and immersive walkthroughs among major updates to geoSLAM solutions
The ZEB Vision 4K panoramic camera. (Photo: GeoSLAM)
GeoSLAM has launch the ZEB Vision 4K panoramic camera, which allows users to capture and process colorized data faster than previous company products.
The company also updated its Connect software platform. Both are designed to accompany GeoSLAM’s ZEB Horizon scanner.
With easy deployment via handheld or backpack, the ZEB Vision’s 4K resolution, 360° panoramic image capture and colorization capabilities add a new perspective to visualizing a point cloud. Images are captured simultaneously during a scan, without the need to stop and take photos.
With Connect software, data captured with the ZEB Vision can be easily colorized, without the need for third-party software.
Users can achieve greater understanding and visibility of the data capture environment with an immersive walkthrough, so they don’t have to be the person capturing the data to see it clearly.
“Being able to add context to data, through colorization and image capture, is invaluable, particularly for those working in the surveying, architecture and infrastructure sectors, where the extra details can make all the difference,” said Neil Slatcher, chief product officer, GeoSLAM.
“Our customers completely own the data and images they collect at no extra cost. We are working hard to make capturing geospatial data as easy as possible, from our walk and scan method of data collection to automated workflows. Teaming the ZEB Vision with our updated Connect software will simplify this process even further.”
Besides RGB colorization, new automation options for ZEB users include:
Automatic Data Cleaning. A range of new data filters and classifiers within Connect 2.1 provides greater point-cloud clarity by removing outliers and other unwanted points such as people and vehicles.
Measuring Tool. Distances between points within any dataset can be measured for quick and accurate analysis.
Existing GeoSLAM customers with a Care subscription can freely update to Connect 2.1; any new products shipped will come with the software, providing users will full ownership of their data.
A colorization dataset of GeoSLAM’s headquarters in Nottingham, UK, captured with a ZEB Vision camera. (Image: GeoSLAM)
Geospatial mapping company GeoSLAM has expanded its mining offerings.
The company also announced an automated processing platform, GeoSLAM Connect, which provides users with the flexibility to process data to their specifications through interactive, customizable script-based workflows.
The new innovations can be used alongside GeoSLAM solutions already available, including GeoSLAM Volumes for stockpile volumetric calculations.
GeoSLAM Production Progress Mapping allows operators to make short-term decisions on newly mined production areas when coupled with the ZEB scanner and its own internal coordinate system. Once the data from each scan has been automatically processed and georeferenced using GeoSLAM Connect, it can be uploaded to compatible third-party software. Operators can overlap collected data and precisely visualize changes over time to compare with project plans.
Convergence Analysis provides mine owners with a rapid and cost-effective way to understand the environment while keeping miners safe by measuring rock support at a safe distance.
A shaft inspection cradle is built for collecting data during inspections and analyzing change. It allows users to understand the erosion of a shaft wall, view blockages and identify hanging points for ore in hard-to-reach shafts.
The next-generation SLAM algorithm — GeoSLAM Beam — powers the new software
GeoSLAM has released a software update, Connect 2.0, at the Intergeo 2021 trade show. Intergeo is taking place this week in Hannover, Germany.
Connect 2.0 enables GeoSLAM scanners to achieve a higher level of accuracy compared to other SLAM-based mapping systems. Colorization from the new ZEB Vision panoramic camera provides even more visual context to a point cloud, as well as interactive “bubble” walkthroughs and measurements.
The update is powered with the next generation of GeoSLAM’s algorithm GeoSLAM Beam, which includes new filtering and georeferencing tools to help users get the best results from their datasets.
Connect 2.0 also simplifies data processing through a series of workflow scripts. This includes automatic data processing, stop-and-go georeferencing and stop-and-go alignment, all available as standard.
Screenshot: GeoSLAM
Connect 2.0 Features
Intuitive interface – The Connect viewer is integrated into the main software interface, making it easy to view multiple point clouds simultaneously and measure the distance between data points.
Change detection – Multiple point clouds can be compared, and any areas that have changed are automatically highlighted. Point clouds also can be compared with CAD models to track progress on a construction site or view changes between scans.
Floor slices – Horizontal and vertical slices can be taken from any location within the point cloud. Horizontal floor slices can also be automatically taken at any given height above the floor.
Environmental presets – Data is processed according to the environment it was captured in (indoor, outdoor, UAV or vehicle).
Draw 4.0 – Draw projects can now be created automatically for any dataset.
GeoSLAM customers with a Care subscription will have full access to Connect 2.0. Any new product shipped starting today comes with both Connect and Hub software.
Real-time processing
GeoSLAM has also launched real-time SLAM processing through remote access. Using an API for remote data capture or automated robotic navigation, users can see the point cloud and trajectory in real time. The ZEB Revo RT can be used on and off a robotic platform.
Photo: GeoSLAM
ZEB Vision panoramic camera
The ZEB Vision 16MP panoramic camera is now available for pre-order. Suitable for any ZEB Horizon, the new camera provides better colorization, image walkthroughs and pointcloud measurements using optional Draw software.
Use on UAVs. Further updates mean that GeoSLAM customers can now take a ZEB Horizon from handheld to UAV usage to get a more complete picture of projects. ZEB Horizon is compatible with the DJI Matrice 300 UAV.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
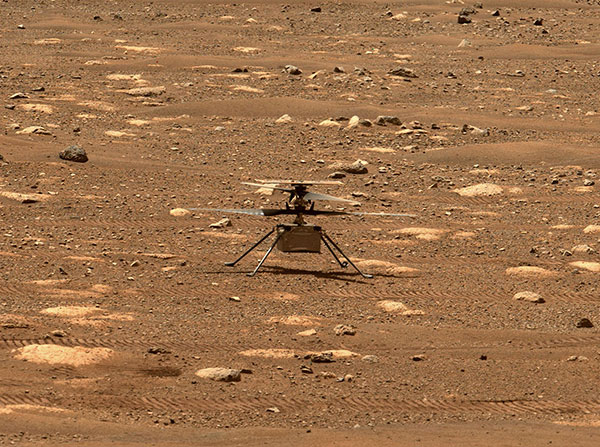
Integrity sits safely on Mars following an in-flight anomaly. (Photo: NASA)
PNT Issue Rocks Ingenuity
The Mars drone Ingenuity uses an inertial measurement unit (IMU) to track position, velocity and attitude. The IMU works with the rotorcraft’s navigation camera, which feeds images into the system. About 54 seconds into Ingenuity’s sixth flight on May 22, a glitch in the pipeline of images delivered by the camera caused Ingenuity to buck. The glitch caused a single image to be lost, resulting in all later navigation images being delivered with inaccurate timestamps. Ingenuity’s navigation system attempted to correct itself due to “phantom errors,” but the copter still managed to land within 16 feet (5 meters) of its target location. The Perseverance rover snapped an image of its flying companion the next day. The timing vulnerability is being addressed.
The versatility of the ZEB-Horizon device enabled the Deep Time team to map the complex and challenging environment. (Photo: GeoSLAM)
Measuring Deep Time and Space
Geospatial 3D mapping specialist GeoSLAM provided the technology to scan one of Europe’s largest caves as part of the Deep Time isolation study. For 40 days, 15 participants set up camp in the Lombrives cave in southwestern France with no clocks or sunlight, and zero contact with the outside world. Conducted by the Human Adaptation Institute, the experiment aimed to gain insight into human adaptability to isolation. For their first task, the “deeptimers” used the ZEB-Horizon to conduct a digital scan of the 3-km Lombrives cave — a system consisting of both narrow passages and expansive chambers up to 70 meters in height, formed more than 125 million years ago.
Photo: Nearmap
Avengers Assemble!
On June 4, Disney unveiled its Avengers Campus at its California Adventure park. Aerial image provider Nearmap, which has been flying over Disneyland and California Adventure twice a year since 2014, shared a bird’s-eye view of the park’s new area, which replaced “A Bug’s Life.” Nearmap also shared images comparing the crowd size in 2019 before COVID-19 to the reopening limit of 25% capacity in April.
Photo: Geoscience Australia
Tasmania First
As part of the Positioning Australia program, Geoscience Australia is building new GNSS ground stations. The first new station was recently completed outside the town of Derby, Tasmania. This new station joins 10 existing stations in Tasmania, providing widely available GNSS-based precise positioning signals. To access the service, users can connect to a service provider offering a fully supported service with system integration; users with specialized equipment and the technical expertise to integrate GNSS positioning can connect directly to the station via Geoscience Australia’s GNSS Data Centre.
The versatility of the ZEB Horizon device enabled the Deep Time team to map the complex and challenging environment. (Photo: GeoSLAM)
Geospatial 3D mapping specialist GeoSLAM provided the technology to scan one of Europe’s largest caves as a part of the Deep Time isolation study.
For 40 days, 15 participants set up camp in the Lombrives cave in southwestern France with no clocks or sunlight, and zero contact with the outside world. Conducted by the Human Adaptation Institute, the experiment aimed to explore the links between the human brain and time, in order to gain insight into the limits of human adaptability to isolation.
Throughout the mission, the “deeptimers” organized tasks to complete within the cave setting to help structure their days. Their first task was to conduct a recce of the location.
GeoSLAM technology was called upon to conduct a digital scan of the 3-km Lombrives cave — a cave system consisting of both narrow passages and expansive chambers up to 70 meters in height, formed more than 125 million years ago.
The handheld ZEB Horizon is put to the test by a Deep Time participant. (Photo: GeoSLAM)
The team used the lightweight ZEB Horizon device, which harnesses GeoSLAM’s unique SLAM (simultaneous localization and mapping) algorithm, putting to the test the device’s 100-m range capabilities. Its versatility and walk-and-scan method of data collection allowed the team the flexibility to crouch, crawl and scan the depths and narrow canals of the cave, including 90-m deep wells.
Traditional tripod-based systems used for digital mapping rely heavily on GPS to collect accurate data. SLAM technology however, overcomes this limitation by cutting out GPS altogether, enabling scans to be carried out in complex and enclosed spaces, including underground.
A Deep Time participant sets up GeoSLAM’s ZEB Horizon scanner. (Photo: GeoSLAM)
With low light levels, an ambient temperature of 10 degrees and humidity levels of 100 percent, the physical and psychological impacts the team experienced were documented on camera.
“We are thrilled to have been associated with the Human Adaption Institute on such an exciting and historic project,” said Tomas Blaha, GeoSLAM channel manager for Europe. “The handheld capabilities of the ZEB Horizon device provided easy-to-use technology for the members of the team with no professional surveying experience. The study tested the limits of human endurance in a challenging environment, and the same can be said of the technology to survey the Lombrives cave. Using traditional static and GPS-based scanners would have been impossible for this project, so we are delighted that the ZEB Horizon’s adaptability and ruggedness played its part in an historic piece of research.”
The 15 participants stand outside the Lombrives cave, France. (Photo: GeoSLAM)
A security technology firm reduced the time needed for public-safety personnel to engage a simulated active shooter by providing the team with site floorplans created from 3D laser scan data.
Before the exercise, the firm scanned the entire 112,000-square-foot building interior in just 2.5 hours with the GeoSLAM ZEB-HORIZON 3D mobile scanner.
“In the role-playing scenario staged at a mega-church, the off-duty police officers reached the shooter in up to 21 percent less time using a 2D floorplan generated from the laser scans,” said Robert W. Myers, CEO of Entropy Group LLC. “However, we expect engagement times to drop considerably by leveraging the 3D scan data to create virtual reality training simulations.”
Based in San Ramon, Calif., Entropy Group was established to save lives during active shooting incidents at schools and churches by providing law enforcement with the situational awareness information they need to reach perpetrators more quickly inside complex building spaces.
Handheld mapping. The firm uses the GeoSLAM ZEB-HORIZON handheld mapping device to capture 3D scans of school and church interiors, including small offices, classrooms and closets. The GeoSLAM software generates highly accurate 2D floorplans for use by responders, either hardcopy or digital, to navigate the interior of the building.
The same data set can also be used to create virtual environments where multiple officers train on computers to respond to attack scenarios in realistic, immersive 3D simulations of actual schools and churches in their jurisdictions.
“Eventually, we plan to utilize machine learning technology that will allow individual officers of first responder teams to be dispatched to specific locations within the facility in real time to quickly reach shooter engagement locations within the buildings,” Myers said.
The handheld ZEB-HORIZON laser scanner allows users to map interior and exterior spaces in 3D at walking speed. The lightweight device captures up to 300,000 points per second with an accuracy of 1-3 centimeters up to 100 meters from the user.
SLAM technology ensures points are tied to local coordinate systems even in interior spaces where GPS/GNSS coverage is poor. Large multi-room buildings that might take days to scan with a stationary scanner can be mapped in a few hours with the ZEB-HORIZON.
“Mobile laser scanning technology is the fastest and most cost-effective way to create the 2D and 3D building information tools public safety personnel need to prepare for a variety of emergency scenarios,” said Shelley Copsey, GeoSLAM CEO.
The GeoSLAM Hub software creates a fully integrated data collection and mapping workflow, enabling ZEB-HORIZON users to process, view, merge, edit and output 2D and 3D deliverables within minutes of data capture. Outputs include 2D floorplans, CAD, as well as an integrated workflow for the creation 3D building information models (BIMs).
Entropy Group is working directly with school districts and places of worship to provide scanning services and develop standardized procedures for the capture of 3D data inside their buildings. These reality capture data sets and derived 2D and 3D products will be provided to local public safety organizations for use in generating hardcopy and digital representations.
NCTech, a developer of reality imaging systems, will showcase its iSTAR Pulsar mobile 360-degree data capture system at Intergeo in Frankfurt, Germany.
Companies at Intergeo, including GeoSLAM and Orbit Geospatial Technologies, will also unveil innovative developments that incorporate iSTAR Pulsar.
iSTAR Pulsar is NCTech’s professional edge-to-cloud big data system, optimized for capture on the move. iSTAR Pulsar is designed to capture 360-degree data while mounted on a vehicle, drone or on foot.
At Intergeo, NCTech will be showing a demonstration of a future feature in its cloud-based processing software VR.WORLD that uses artificial intelligence and image recognition to analyze the images captured by iSTAR Pulsar. This means that objects like cars, trucks, traffic lights, road signs, pedestrians and cyclists can be automatically identified in images, the company said.
Handheld 3D mobile mapping company GeoSLAM also will introduce new developments at Intergeo, including an innovation that integrates with iSTAR Pulsar.
“We immediately saw the potential for collaboration when NCTech introduced the iSTAR Pulsar,” said Mark Reid, head of strategic business development, GeoSLAM. “And now we’re excited to show the attendees at Intergeo what we’ve been working on.”
Orbit GT has updated its mobile mapping software to enable iSTAR Pulsar data to be integrated into its smart 3D mapping solutions.
“We’re very pleased to announce that Orbit GT solutions now support data from NCTech’s iSTAR Pulsar,” said Peter Bonne, CEO, Orbit GT. “We’ll be showcasing the great 360-degree imagery captured by iSTAR Pulsar at our booth.”
“We launched iSTAR Pulsar earlier this year, so it’s great to see that key industry players like GeoSLAM and Orbit GT are already leveraging its capabilities in their own developments,” said Andrew Baddeley, technical sales director, NCTech. “Combined with the exciting new AI developments from our labs, we look forward to showing everyone at Intergeo how we are helping to virtualize the world.”
NCTech, a developer of reality imaging systems, will showcase its iSTAR Pulsar mobile 360-degree data capture system at Intergeo in Frankfurt, Germany.
Companies at Intergeo, including GeoSLAM and Orbit Geospatial Technologies, will also unveil innovative developments that incorporate iSTAR Pulsar.
iSTAR Pulsar is NCTech’s professional edge-to-cloud big data system, optimized for capture on the move. iSTAR Pulsar is designed to capture 360-degree data while mounted on a vehicle, drone or on foot.
At Intergeo, NCTech will be showing a demonstration of a future feature in its cloud-based processing software VR.WORLD that uses artificial intelligence and image recognition to analyse the images captured by iSTAR Pulsar. This means that objects like cars, trucks, traffic lights, road signs, pedestrians and cyclists can be automatically identified in images, the company said.
Photo: NCTech
Handheld 3D mobile mapping company GeoSLAM also will introduce new developments at Intergeo, including an innovation that integrates with iSTAR Pulsar.
“We immediately saw the potential for collaboration when NCTech introduced the iSTAR Pulsar,” said Mark Reid, head of strategic business development, GeoSLAM. “And now we’re excited to show the attendees at Intergeo what we’ve been working on.”
Orbit GT has updated its mobile mapping software to enable iSTAR Pulsar data to be integrated into its smart 3D mapping solutions.
“We’re very pleased to announce that Orbit GT solutions now support data from NCTech’s iSTAR Pulsar,” said Peter Bonne, CEO, Orbit GT. “We’ll be showcasing the great 360-degree imagery captured by iSTAR Pulsar at our booth.”
“We launched iSTAR Pulsar earlier this year, so it’s great to see that key industry players like GeoSLAM and Orbit GT are already leveraging its capabilities in their own developments,” said Andrew Baddeley, technical sales director, NCTech. “Combined with the exciting new AI developments from our labs, we look forward to showing everyone at Intergeo how we are helping to virtualize the world.”
The ZEB-REVO RT is the next generation of the ZEB-REVO, GeoSLAM’s lightweight handheld laser scanner that allows the rapid and simple mapping of complex, indoor and multi-level spaces.
The ZEB-REVO RT uses technology to seamlessly connect the scanner to a mobile phone or tablet, allowing for real-time data visualization as you walk and scan, the company said.
GeoSLAM launched its new offering in Europe at Intergeo in Berlin, Germany. This month, GeoSLAM will be premiering its new products to American audiences at the Fall BIM Forum, held Nov. 6-8 in Dallas. BIM stands for building information modeling.
The simultaneous scanning and processing of 3D data removes any need for post-processing, effectively slashing project survey times in half. The technology is so rapid, users can scan and process a three-story building in just 30 minutes, the company added.
The successor to GeoSLAM Desktop, GeoSLAM Hub is the latest version of the award-winning SLAM registration software. Enabling end-to-end data capture, the tool allows users to process, view, merge, edit and output 2D and 3D deliverables all from within the one software package.
The mission statement of the BIM Forum is to explore technological and delivery innovation and performance improvement through BIM and new means of collaboration. This mission dovetails with GeoSLAM’s technologies.
To find out more about GeoSLAM’s activities at Fall BIM Forum 2017, visit the events page or visit GeoSLAM in person at Booth 627.
When it comes to renovating a building, unforeseen structural problems or lack of knowledge about the materials used can result in costly delays. Detailed site surveys help to highlight these issues before work begins — and digital technology is playing an increasingly important role in identifying them.
The GeoSLAM ZEB-REVO. (Image: GeoSLAM)
A project undertaken at a 112-year-old school highlights the advantages of using 3D mobile indoor mapping for rapid and simple site surveys.
“The beauty of scanning an historic building is that you find yourself delving into the stories behind its life,” said Stuart Cadge, sales and marketing coordinator at GeoSLAM. “As you peel back the layers you discover how the building has been used and altered over many decades of use.”
This was certainly the case at the Attucks school in Kansas City, Cadge said. The distinctive red-brick building was designed by local architect Charles A. Smith and built in 1905. It is known for its colonial revival influences and also played a key role in the educational history of the African-American community.
Two decades later, the school was suffering from over-crowding, and Smith was asked to extend it with a two-storey wing that connected to the east façade of the building. While the 1905 building had been symmetrical, the extension changed the floor plans considerably. Nevertheless, Smith delivered a sympathetic design that incorporated some of the original architectural details, ensuring the new wing was in keeping with the building’s aesthetic.
While details of the school’s building history are available on national and state registers, it would not have been possible to uncover problems in its structural condition without an accurate survey.
A Unique Challenge
Redeveloping and retrofitting a building like Attucks requires careful planning to uncover any existing conditions in its infrastructure. Civil engineering firm BHC RHODES was tasked with providing a 3D Revit building information model (BIM) of the building. The firm decided to use lidar 3D mobile mapping technology provided by GeoSLAM to achieve this.
The extremely rapid and efficient workflow of the GeoSLAM solution meant that possible setbacks in the project, caused by weakness in the structure, could be identified in advance, helping to speed up delivery time and reduce the overall project spend.
At Attucks, there were visible signs of deterioration to the wooden flooring, as well as concerns about ceiling collapses and air quality — specifically, asbestos.
The Value of Technology
“The process of mapping a historic building can expose site personnel to a number of risks, so BHC RHODES wanted to ensure they spent as little time on-site as possible,” Cadge explained.
As well as entering the Attucks building, personnel were required to move across the site safely, climb stairs and go into places that a trolley scanner could not.
On this basis, the firm chose the GeoSLAM ZEB-REVO, a handheld, lightweight, mobile mapping scanner, which employs 3D Simultaneous Localization And Mapping (SLAM) technology. In this case, it was seen as a much more time- and cost-effective alternative to terrestrial, static or trolley-based systems.
The complete 3D scan of the building comprises four separate scans and over 160 million data points. (Image: GeoSLAM)
“The ZEB-REVO is an incredibly useful tool for indoor mobile mapping, particularly in buildings with multiple storeys,” Cadge said. “It enables users to simply ‘walk and scan’ the building, in order to generate building footprints, 2D plans, area measurements for real estate and facility management, 3D BIM models — the list goes on.”
In the case of Attucks, just four-and-and-half hours were needed to scan the whole building, with the ZEB-REVO recording more than 43,000 measurement points per second. This was helped by the fact that operation of the device requires minimal staff training.
Results
Data from the ZEB-REVO and a trolley-based scanner were registered with Cyclone 9.1.4 to a common coordinate system before being exported to Autodesk ReCap as a .pts file format. From this, data was divided into 10-GB files to be used in ReCap and Revit 2014, where a level 200 BIM model was generated. The smooth and hassle-free workflow resulted in the entire building model being completed two weeks earlier than predicted.
The Jazz District Redevelopment Corporation (JDRC) in Kansas City has plans to transform Attucks into a new community performing arts facility, with office space, paying tribute to its African-American history. By supplying the JDRC with the geospatial data, the organization was better able to understand the structural condition of the building and consider how the space could be used.
The 3D point data was used to build a level 200 BIM model in Recap and Revit 2014. (Image: GeoSLAM)
The development will form an integral part of the 18th and Vine historic district in Kansas City, known as the Jazz District. The area is recognized as one of the cradles of jazz music in the 1920s and 1940s, and a historic hub of African-American businesses.
To secure approval on the plans for Attucks, JDRC must produce detailed drawings that show what materials will be used, as well as full dimension drawings, floor plans, site drawings and elevations. In addition, it must provide details, both graphically and in written form, on what parts of the building will remain and what renovation techniques will be used.
All this might present a number of challenges, but the scans produced by GeoSLAM’s ZEB-REVO show that the existing buildings are of exceptional quality. When the project does proceed, it will be able to do so quickly and efficiently thanks in part to the speed, simplicity and ease of use of the ZEB-REVO.