Unicore Communications has released a GNSS, high precision, real-time kinematic (RTK) module, the UM960. This module can be used for a wide range of applications, such as robotic mowers, deformation monitoring, UAVs, handheld GIS, and more.
It features a high position fix rate and provides accurate and reliable GNSS positioning data. The UM960 module supports BDS B1I/B2I/B3I/B1c/B2a*, GPS L1/L2/L5, Galileo E1/E5b/E5a, GLONASS G1/G2, and QZSS L1/L2/L5. The module also has 1,408 channels.
In addition to its small size, the UM960 features low power consumption — less than 450 mW. The UM960 also supports single point positioning and RTK positioning data output at 20 Hz.
The development kits will bring together u-blox’s centimeter-level positioning and wireless communications expertise and services to support faster time-to-market for new products
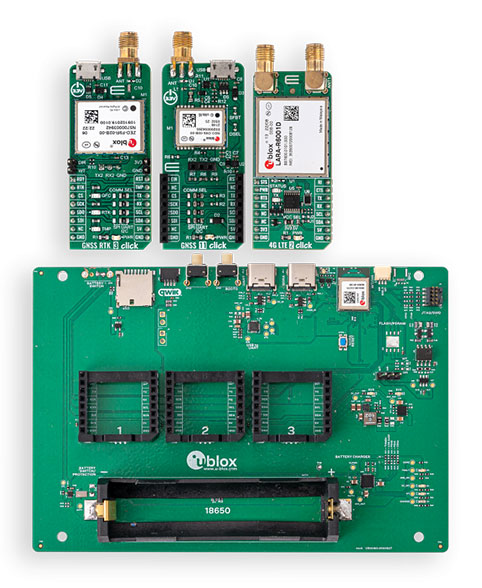
The XPLR-HPG-1 high-precision GNSS explorer kit. (Photo: u-blox)
U-blox has announced new explorer kits to make it quicker and easier for engineers to design and evaluate products requiring centimeter-level positioning capabilities.
Set to launch in early 2023, the ready-to-use XPLR-HPG-1 and XPLR-HPG-2 solutions will combine u-blox’s unique offering across the key technologies required to achieve highly precise positioning.
As well as an open microcontroller unit (MCU), the kits will include high-precision GNSS positioning with real-time kinematic (RTK), dead-reckoning, cellular, Wi-Fi and Bluetooth communications, along with the necessary antennas.
The kits are designed to integrate seamlessly with complementary u-blox services, such as PointPerfect GNSS augmentation service and the ubxlib software component.
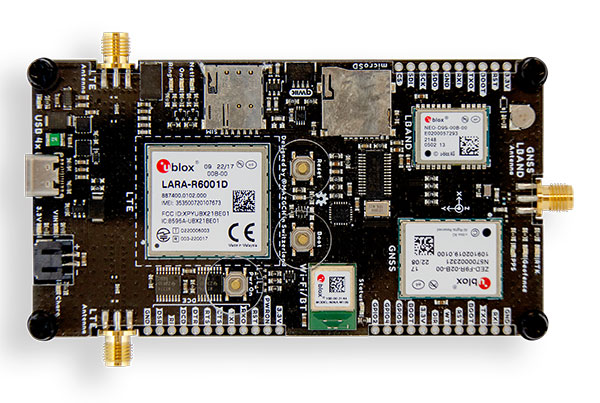
The XPLR-HPG-2 High precision GNSS explorer kit. (Photo: u-blox)
The kits will assist engineers working in areas such as micro-mobility and low-speed robotics, helping them build, test and demonstrate early-stage proofs of concept more quickly, supporting faster overall time-to-market.
Both explorer kits will include the full gamut of u-blox technology and software required.
The modular XPLR-HPG-1 kit will be based around the wireless MCU in the u-blox NORA-W106 , with its Wi-Fi and Bluetooth LE capabilities, and will give engineers flexibility to adjust their solutions to their precise needs, using MIKROE Click boards featuring a variety of u-blox modules. The kit will include three Click boards, which respectively incorporate the ZED-F9R high-precision RTK GNSS module, the LARA-R6001D LTE Cat 1 module (global coverage and with built-in MQTT client), and the NEO-D9S L-band correction data receiver module. Engineers can purchase others based on their application’s needs. The kit’s source code will include example software for the Espressif IoT Development Framework (ESP-IDF), based on ubxlib software components.
The compact XPLR-HPG-2 will deliver an integrated solution, incorporating the ZED-F9R high-precision RTK GNSS, LARA-R6001D LTE Cat 1 (with global coverage and built-in MQTT client) and NEO-D9S L-band correction data receiver modules, as well as the NINA-W106 with its MCU, Bluetooth LE and Wi-Fi capabilities.
An interview with Markus Uster, head of product center positioning at u-blox about recent GNSS receiver innovations.
Uster
What was the most significant technical innovation in your GNSS receivers in the past five years?
The u-blox F9, launched in 2018, is our robust and versatile high-precision positioning technology platform. It was the first receiver to enable multi-band high-precision positioning solutions for mass-market industrial and automotive applications — and remains the benchmark for the industry today.
The platform combines multi-constellation (continuous reception of four satellite constellations) GNSS technology with dead reckoning and high-precision algorithms. It is also compatible with a variety of GNSS correction data services to achieve positioning accuracy down to the centimeter level.
The u-blox F9 platform is leading the next generation of high-precision navigation with its augmented reality, unmanned vehicles and various machine automation applications. It has since been integrated into a selection of modules catering to a wide range of applications.
What has it enabled users to do that they could not do before?
The u-blox F9 is a widely adopted multi-band GNSS platform for automotive and industrial applications. (Photo: u-blox)
In a nutshell, the u-blox F9 brought high-precision positioning to the mass market. The demand for scalable high-precision technology is growing rapidly, as evident in the automotive world with next-generation advanced driver-assistance systems (ADAS) and in robotics with applications such as UAVs and robotic lawnmowers. However, due to the complexity, size, power and cost restrictions of existing high-precision solutions, until now it has been difficult to meet the demands of these markets.
u-blox developed the u-blox F9 platform by building on the success of our NEO-M8P high-precision GNSS module series and drawing on our extensive experience in GNSS positioning technologies, including dead reckoning, multi-band, real-time kinematic (RTK) and GNSS correction services. The platform delivers the next level of scalable GNSS high-precision technology and shows how u-blox is consistently addressing challenges and driving the GNSS technology evolution.
What is a good example of this?
Integration of the u-blox F9 platform into various applications has proven quite successful in a diverse range of use cases. In the industrial realm, u-blox F9 technology enables mass adoption of commercial unmanned vehicle applications. One example is precision agriculture, where high-precision positioning cost-effectively enables vehicle guidance solutions to improve pass-to-pass accuracy resulting in improved crop yield and reduced consumption of pesticides, fertilizer and seeds. The u-blox F9 modules also paved the way for autonomous driving, including lane-level navigation for heads-up displays and vehicular infotainment systems, a prerequisite for highly automated and fully autonomous vehicles.
Trimble has announced a new high-performance data collector for its Mapping and Geographic Information Systems (GIS) portfolio — the Trimble TDC650 handheld. Built for GIS data collection, inspection and asset management activities, the TDC650 provides users a rugged solution with scalable high-accuracy GNSS positioning for professional field workflows.
The TDC650 is fully integrated with today’s demanding GIS data environment, powered by the Trimble Software Development Kit (SDK) that enables precision GNSS positioning for apps such as Esri ArcGIS Field Maps and Trimble TerraFlex software. The TDC650 is also a scalable solution that allows customers to choose their desired accuracy down to the centimeter-level to meet needs and budget requirements.
“This is an ideal tool for customers tasked with modernizing critical utilities including electric, gas and telecommunications networks,” said Gareth Gibson, marketing director, Trimble Mapping and GIS. “The precision, quality and data integration workflows needed to map the physical world to a digital one in these projects requires a modern data-collection platform like the TDC650.”
City, state and local governments and utilities will benefit from this solution, which is part of the larger Trimble Public Sector ecosystem that includes Cityworks software for stormwater inspections and Trimble Unity for monitoring municipal water pressure and hazards. As GIS data continues to grow more complex, Trimble helps simplify, visualize and make sense of the data so customers can make better decisions in managing their communities’ assets.
Tall buildings block GNSS signals, making satellite navigation in urban canyons very challenging. (Photo: RoschetzkyIstockPhoto/iStock/Getty Images Plus/Getty Images)
GPS positioning for navigation and mapping is challenging in urban environments, where GPS signals often are blocked by tall buildings. The following three papers — to be presented at the Institute of Navigation (ION) GNSS+ conference Sept. 19–23, 2022 — explore ways to solve that problem. The full papers will be available at www.ion.org/publications/browse.cfm following the conference.
ALGORITHMS FOR URBAN MAPPING
In this work, the authors use an urban environment model incorporating visibility predictions and remote-sensing techniques, which they tested in a sensor-equipped vehicle in Denver. They use an interacting multiple model (IMM) filter that uses extended Kalman filters to build and verify a map of the signal environment in an urban-canyon setting. The techniques will give ground-vehicle operations the ability to plan for blocked and delayed signals for global path planning.
Zeller, Emma; Strandjord, Kirsten, University of Minnesota; and Wang, Pai, Shanghai Jiao Tong University; “Algorithms for Mapping the Urban Signal Environment for Navigation of Ground Vehicle Operations.”
ADDING VISUAL TO GNSS/INS
GNSS real-time kinematic (GNSS-RTK) positioning is a key technology for surveying and mapping applications. To extend the capability of GNSS in difficult environments, a tight coupling between GNSS-RTK and an inertial navigation system (INS) can greatly improve the results. If the time spent in a GNSS outage is too long or if the kinematic of the survey is too weak, the GNSS/INS solution can be compromised with high navigation errors, ultimately making it impossible to align the heading angle at initialization.
This paper presents an innovative solution to overcome GNSS/INS limitations, minimizing system complexity by using a tightly coupled GNSS/INS solution with a monocular visual inertial SLAM system. This solution is capable of initialization in a few seconds and is very reliable in the long term. This vision/INS/GNSS coupling increases the overall RTK fix rate and broadens the availability of high-precision navigation solutions under challenging conditions.
Bénet, Pierre; Saussay, Brice; Saidani, Mourad; and Guinamard, Alexis; SBG Systems; “Tightly Coupled Inertial Visual GNSS Solution: Application to LIDAR Mapping in Harsh and Denied GNSS Conditions.”
USING 3D BUILDING MODELS
To solve the urban-navigation challenge, the authors propose using a 3D building model to assist GNSS positioning. This type of algorithm is named the 3D building model aided GNSS (3DMA GNSS). It can predict measurement errors and the visibility of the satellites, as line-of-sight or non-line-of-sight. The solution is then derived from the likelihood of the observed and predicted measurements over candidate locations.
The authors propose an innovative method for evaluating the reliability of building models based on the awareness of sky visibility in a specific geographic context. Sky visibility estimation is improved with use of a support vector machine regression and considering low-Earth-orbit (LEO) constellations. The real-time sky visibility could present the update of the surrounding buildings, whereas the predicted sky visibility based on the existing building models remains unchanged. Making use of this inconsistency, the authors could identify areas with the updated building. Additionally, the impacts of the building update monitoring on the 3DMA GNSS are evaluated in an urban canyon.
Xu, Hao-Sheng and Hsu, Li-Ta; Department of Aeronautical and Aviation Engineering, The Hong Kong Polytechnic University; “Urban Buildings Update Monitoring Based on Sky Visibility Estimation using GNSS and LEO.”
The largest source of error in GNSS positioning is the delay suffered by the signals as they pass through the ionosphere traveling from the satellites in orbit to receivers on or near Earth’s surface. That is because the ionosphere is full of free electrons stripped from atoms and molecules by ionization and this plasma refracts the signals, changing their speed. Normally, models compensate for this. However, geomagnetic storms wreak havoc on the free electrons in the ionosphere, making it difficult to accurately determine the signal delay.
That is why space weather matters for GNSS and for the myriad human activities that have come to depend on it.
So, here’s the good news. “On a scale of one to five, the geomagnetic storm on April 14 was a three,” Bill Murtagh told me. Murtagh is the Program Coordinator and Space Weather Forecaster at the Space Weather Prediction Center (SWPC) of the National Oceanic and Atmospheric Administration (NOAA). He was referring to the third rung of NOAA’s space weather scales, which were introduced to communicate to the public the current and future space weather conditions and their possible effects on people and systems.
NOAA has three space weather scales, one each for geomagnetic storms (G scale), solar radiation storms (S scale), and radio blackouts (R scale). The steps on the scales, ranging from “minor” to “extreme,” are analogous to those NOAA uses to classify hurricanes, tornadoes and earthquakes. They describe the environmental disturbances for each of these events and list their possible effects at each level.
Solar activity runs in 11-year cycles. A G5 event happens two or three times per cycle, and the last one was in October 2003, Murtagh told me. “I can only remember a handful of occasions over the past 20 years when ionospheric activity has significantly impacted users,” told me Gavin Schrock, PLS, manager of the Washington State Reference Network, a regional cooperative of GPS reference stations and data. According to Rick Hamilton, the GPS Information Analysis Team Lead at the U.S. Coast Guard Navigation Center, it “did not receive any reports of interference related to the geostorm” and “there was no significant increase in reports that we might attribute to geomagnetic activity.”
Now, the bad news. We are heading for a maximum in solar activity, expected to occur in 2025. The Sun is “already quite active,” Murtagh pointed out, and recently there has been an increase in the number of R1 and R2 storms. Solar coronal mass ejections (CMEs), which launch plasma and magnetic fields into space, also have become more frequent. When a CME hits the Earth, its collision with the Earth’s magnetic field causes a geomagnetic storm.
So, the GNSS constellations and the GNSS industry should be preparing now. Fortunately, improvements in GNSS software and receiver technology, plus corrections and integrity information and the much larger number of satellites, make us better prepared than we were during the last cycle. On the other hand, the stakes also are much larger, due to our ever-greater reliance on GNSS.
As a sailor, I rely on NOAA nautical charts and marine weather forecasts. GNSS users can thank NOAA for its space weather forecasts.
A PNT expert suggested that my piece titled “Opposite and Complementary: eLoran is part of the solution to GNSS vulnerability” in our November 2021 issue could be augmented with information not currently available on the proposed eLoran capability. This expert also questioned my statement that eLoran “does not have any common failure modes with GNSS” and pointed to potential common threats such as from cyberattacks, physical attacks, and space weather.
Matteo Luccio
I welcome such feedback on the contents of these pages — and agree that in this case some hard questions are warranted. So, in the interest of further exploring the use of eLoran, I pose some questions, hoping that its advocates will provide answers. I know that at least some of them will not shy away from this challenge.
Please note that I wish to keep the discussion on positioning, not the easier question of timing, because that was the primary focus of my article. I also wish to address long-term outages (weeks or months), which would have a greater impact on the United States.
Some of these questions have been addressed, at least in part, in various studies and proposals, most of them now more than a decade old. So, it would be helpful to update those answers and consolidate them in the pages of this magazine.
1. Accuracy specifics. While my November article stated that eLoran would have a two-dimensional accuracy of “better than 20 meters, and in many cases, better than 10 meters,” is that RMS, 95%, or some other statistic?
2. Performance standard. GPS provides a commitment to users in a published performance standard. What specific measures of positioning accuracy, integrity and continuity would you recommend the proposed eLoran system be committed to provide (using the architecture described in the answer to Question 6)?
3. Coverage. Would you recommend this eLoran positioning performance hold for the entire United States (including Alaska, Hawaii, Puerto Rico and other territories), only for the “lower 48” states, or only parts of these 48 states?
4. Current users. By number of users, the predominant common current civil uses of GNSS for positioning are consumer devices (mostly cellphones). By contribution to the U.S. economy, the predominant uses are high-precision applications. For what fraction of these uses would eLoran positioning be adequate? Could an eLoran receiver and antenna fit in today’s consumer devices?
5. Future uses. Emerging civil uses of GPS for positioning include autonomous ground and air vehicles, navigation to space and in space, and lane-accurate car navigation. Which of these could be served by eLoran?
6. Architecture. To maintain accuracy during a prolonged GPS outage, eLoran would require reference stations to calibrate time-varying propagation errors, as well as a certain number of transmitters for good nationwide geometry and for redundancy, ensuring service even if a transmitter is attacked or is taken off-line for maintenance. What architecture would you recommend to achieve this?
7. Infrastructure cost. What would be the cost of installing the required transmitters, power supplies, reference stations, communication links and control system for the architecture described in the answer to Question 6? Can you reference a recent and independent estimate? To a ballpark figure, what cost fixed-price contract would you accept to implement it? Similarly, what would be the annual costs for operating and maintaining this infrastructure?
8. Impact. eLoran transmitters are large and high-power. Providing positioning across the United States could require building some of them from scratch or significantly reconstructing old Loran sites. What issues — such as environmental, aviation safety and security — would this raise, and how would you recommend they be addressed?
9. Receivers. Assuming all the above were achieved, it would accomplish nothing unless eLoran receivers were widely purchased, installed and used. How much would that cost? Who would pay? Should we assume that “if we build it, they will come”?
10. Alternatives. Given the widespread development of other positioning technologies over the past decade, much has changed since the earlier recommendations for eLoran. How do we know that eLoran is the right investment — or even a needed part of the solution or needed system in a system of systems — for the future of U.S. PNT?
Common threats to GNSS and eLoran could include the following:
1. Cyber attacks. Given that GPS’s OCX is said to be the most cybersecure system built by the U.S. Department of Defense, how would eLoran’s control system be even more cybersecure than OCX, to avoid a common cyber-vulnerability?
2. Physical attacks. Given concerns about possible physical attacks on GPS satellites, which move at multiple km/sec 20,000 km from Earth, would it not be easier to physically attack eLoran transmitters, which are stationary, terrestrial, in remote locations, and hundreds of feet tall and require massive power sources?
3. Space weather. GPS is potentially vulnerable to severe space weather that could damage satellites or temporarily hinder signal propagation from space to Earth. However, severe space weather could also damage the power grid upon which megawatt eLoran transmitters rely. How would eLoran service be protected from the effects of severe space weather, such as a Carrington Event?
Send me your thoughts at the e-mail address below, with “eLoran” in the subject line.
DDK Positioning’s precise GNSS positioning solution provides an accuracy of less than 5 cm
NSSLGlobal has entered a strategic alliance with DDK Positioning, to incorporate enhanced GNSS positioning navigation and timing solutions into NSSLGlobal’s maritime portfolio.
NSSLGlobal will now provide, install and service DDK’s GNSS precise point positioning (PPP) solution which enhances the ability of NSSLGlobal’s customers to precisely locate and track their assets.
DDK’s independent GNSS technology is provided exclusively through Iridium’s global satellite constellation, and creates a robust, resilient and completely independent GNSS solution that has an enhanced accuracy of less than 5 cm, compared to the standard GPS accuracy of 10 m.
“This partnership is a fantastic fit for DDK Positioning,” said Kevin Gaffney, DDK Positioning CEO. “We are now in a place to provide our clients with our precise positioning solutions globally and we are delighted to formalize our working relationship with NSSLGlobal with the signing of this new strategic alliance.
Photo: DDK Positioning
“To continue the journey with such a strong and well-respected company such as NSSLGlobal, and with their reach in the market, makes great sense and we are looking forward to the journey that we will have together.”
“DDK Positioning is leading the field in advanced GNSS positioning,” said Paul Rutherford, service director, NSSLGlobal. “We’re pleased to partner with such an innovative company and to be able to add this technology offering on top of the already extensive navigation and communication portfolio we offer our customers. The system will provide greater location accuracy, along with the ability to help detect and mitigate spoofing.”
Trimble to provide reliable in-lane positioning for the year-long research program
Trimble and VSI Labs have formed an alliance, with Trimble serving as the GNSS precise positioning supplier for VSI’s autonomous research vehicle program. The alliance officially kicked off in March at Destination ACM, a long-distance driving event for VSI’s research vehicle that continues with additional events throughout the year.
The collaboration provides the opportunity to showcase Trimble RTX technology as the trusted precise-positioning correction source for car manufacturers and their suppliers. Coupled with Trimble’s inertial positioning, Trimble RTX plays a pivotal role in a vehicle’s ability to maintain accurate and reliable lane-discipline during autonomous driving.
Destination ACM launched from VSI’s Minneapolis headquarters en route to the American Center for Mobility’s (ACM) test center in southeast Michigan where a day of testing and demonstration took place March 26.
“The integration of Trimble’s precise RTX positioning is a key element of VSI’s technology stack for advanced driver assistance systems (ADAS) and autonomous vehicle (AV) applications,” said Stephen Ruff, general manager of Trimble’s On-Road Autonomy Division. “VSI Labs is a leading researcher of best-in-class technologies critical to autonomous vehicle development.”
Suitable for on-road driving applications, Trimble RTX corrections operate on a single, global network. Drivers are not subject to the coverage outages that can exist when relying on local positioning systems — requiring line-of-sight to a positioning source or radio/cellular/internet connections.
When occasional obstructions are present, such as a bridge, tunnel or deep urban or rural canyon, Trimble augments its precise GNSS positioning with inertial technology to maintain continuous positioning and orientation while on the road.
Trimble’s innovative GNSS positioning is being used on the road today by a number of automotive OEMs and Tier 1 suppliers to improve the functional safety and performance of ADAS for passenger vehicles. Consumers have logged more than 7 million miles using Trimble RTX for lane-level positioning to date.
“VSI Labs is thrilled to have Trimble’s RTX technology on board,” said Phil Magney, founder and president of VSI. “Trimble’s positioning capabilities allow us to really expand our applied research on the safety and performance of autonomous and ADAS driving solutions.”
Trimble GNSS positioning technology will be used in the VSI research vehicle during each of the quarterly Destination ACM events, the Drive World Conference in Silicon Valley in August, the VSI 2021 “Drive South,” and other events this year.
For more about autonomous vehicles, see our June issue.
GNSS Winter School 2021 is planned for Feb. 22-26 in Islamabad, Pakistan. The Institute of Space Technology is hosting the event, in collaboration with the Space Education Research Lab of the National Center of GIS and Space Applications.
GNSS Winter School will be held on the institute’s campus; however, in case of severe circumstances (such as COVID-19), it will take place virtually online either partially or entirely.
GNSS Winter School will focus on GNSS positioning, coordinate and time reference systems, satellite orbit and position determination, signals, receivers, and specialized areas of inertial and integrated navigation systems.
A special session is planned on GNSS applications and opportunities in the current GNSS market.
The school is intended for engineers, researchers and students working in aeronautics and astronautics; guidance, navigation and controls; satellite or radio navigation; inertial and integrated navigation systems; space systems; constellation designs; interplanetary navigation; remote sensing; geoinformation science; and similar allied areas.
The conference will feature two tracks: commercial and policy, and research. The commercial and policy tracks include high performance and safety critical applications; status and future trends in GNSS; and mass market and commercial applications. The research tracks include multi sensor and autonomous navigation; algorithms and methods; and advanced GNSS technologies.
The conference will also feature a new competition, the High Precision GNSS Positioning on Smartphones Competition. According to ION, participants will use a pool of GNSS datasets collected from smartphones and accompanied with high accuracy ground truth to achieve the best accuracy with the datasets provided. The winner will be based on the accuracy of the results. Team winners will win a cash prize, the opportunity to present their results during ION GNSS+ 2021 and be recognized during the ION GNSS+ Awards Ceremony, ION added.