Farmers rely on their GNSS receivers to keep their machines on track, their maps accurate, and their rows straight in demanding environments. GNSS receivers on agricultural equipment need to continue to perform at a high level when faced with extreme weather, temperature and vibration while navigating varying terrain. In addition, farmers rely on the correction services that provide them with the high accuracy needed to keep them operating. Still, they face challenges with outages and interruptions from obstacles blocking satellite signals.
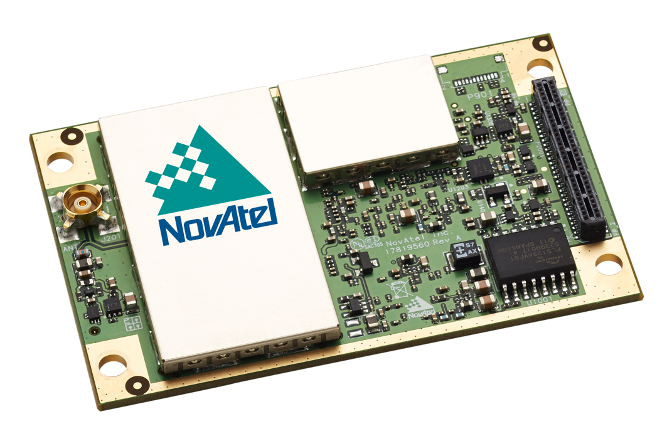
Hexagon | NovAtel’s SMART7 GNSS receiver and TerraStar Correction Services together create an accurate, robust and reliable solution for farmers. These products undergo extensive testing to ensure a high-performing and dependable solution. The SMART7 accesses all four GNSS constellations (GPS, GLONASS, BeiDou and Galileo), providing the best availability in variable terrain and environmental conditions. To compensate for the pitch and roll in the field, the receiver includes terrain compensation — keeping farmers at centimeter-level accuracy when using TerraStar-C PRO, TerraStar-X or RTK corrections.
Photo: Hexagon | Novatel
TerraStar Correction Services are based on a global network of advanced and proprietary GNSS control centers to ensure 99.999% signal availability to farmers. By delivering quality satellite corrections without the need for base stations, farmers can get the accuracy needed for their operations in a scalable format that moves with their equipment.
Jacob Van Den Borne is a potato farmer in the southern region of the Netherlands. He has been working with precision farming for more than 10 years and recently switched his Fendt tractor to NovAtel’s SMART7. Throughout his last season, Jacob noticed a substantial improvement in signal reception while passing along the edges of his heavily treed field. Previously, his GNSS equipment would lose reception, causing his rows to wander. After using a SMART7 for one season and experiencing its high precision and reliability, Van Den Borne plans to switch all receivers on his farm to the SMART7.
Evolving advanced driver-assistance systems (ADAS) and developing safe perception and positioning systems in the agriculture industry are top priorities for NovAtel. With the challenges faced by farmers, finding new ways to support a sustainable increase in their production and productivity will help ease the pressures of a growing population.
Today, many field operations — sowing, tilling, planting, cultivating, weeding and harvesting — rely on satellite-based autonomous guidance technology for agricultural machines. Yet farmers are still challenged by poor signal tracking, signal interference, communication instability and heading inaccuracy in tough environments, such as on uneven ground or slopes or under dense tree canopy. Because of insufficiently advanced navigation technology, ordinary machines fail to achieve the high efficiency expected and might even cause safety hazards. Therefore, the market has been awaiting a high-performance smart antenna with centimeter-level accuracy.
Harxon’s Smart Antenna TS112 PRO provides scalable and reliable positioning solutions for tough agricultural environments, such as uneven ground or fields with underground cables, as well as complicated weather conditions, including rain, fog and dust clouds.
The TS112 PRO integrates in one compact enclosure Harxon’s four-in-one GNSS/4G/Bluetooth/Wi-Fi antenna and a Hexagon | NovAtel OEM GNSS module. The multi-constellation GNSS antenna is designed with Harxon X-Survey technology and features multi-point feeding with high gain and wide beam width, which ensures high phase-center stability for ultimate RTK centimeter-level positioning accuracy. This is realized by subscribing to the Ntrip service via the LTE network to receive corrections or by setting up a local base station to broadcast corrections by radio.
The Hexagon | NovAtel OEM GNSS module is default-enabled for RTK, offering precise positioning and advanced interference mitigation for space-constrained applications and challenging environments. Additionally, users can achieve globally available centimeter-level positioning accuracy by using TerraStar satellite-delivered L-band correction services, with no need to set up an expensive network infrastructure.
TS112 PRO guarantees pass-to-pass accuracy down to 20 centimeters, where relative positioning is critical. It can also provide smoother steering and straighter rows by reducing positioning jumps that might occur during RTK signal outages or when a smart antenna changes positioning modes. Its terrain compensation algorithm is capable of correcting deviations caused by a vehicle’s roll and pitch while working on uneven ground or slopes.
Approaches to providing real-time kinematic (RTK) solutions at high rates have existed in various forms for decades, providing value for high precision applications. This technique is nearly universally adopted in the industry, and many surveyors may have been using it for years without realizing it. Yet there are persistent misconceptions about the subject.
By Gavin Schrock, PLS
For many on the development side of high-precision real-time kinematic (RTK) GNSS, like those we interviewed for this article, the incorporation of high-rate solutions into their RTK products is a given — and has been for a very long time. Yet, in some end-user communities there may still be many question marks: Does my gear do it? Does other gear do it? What can it do for me? What are the pluses and minuses?
We asked for insights from 10 prominent firms that develop and manufacture RTK-enabled high-precision GNSS solutions and equipment, spanning multiple applications:
By high rate, we mean higher than 1 second (1 Hz) increments, such as 0.2 second (5 Hz), 0.1 second (10 Hz), etc. Part of the confusion about high-rate RTK is that there are two scenarios. One is transmitting corrections from a base or network at high rate, receiving and solving on-the-field sensors or rovers at a high rate (for example, 5 Hz base + 5 Hz rover).
The other is base transmission of corrections at a lower rate and receiving/solving on the rover at a higher rate (for example, 1 Hz on the base + 5 Hz or more on the sensor/rover).
While both can be valuable for different applications, what has been adopted as standard for most surveying, construction, agriculture and mapping applications is the latter.
What are applications that would run the base and rover at higher than 1 Hz? “Moving Base” applications are prime examples, where you are seeking to resolve positions for one or more sensors relative to a base that is also on a moving platform. Think of a barge on the ocean where a helicopter (or rocket) might be landing. Here is a definition from the user manual for a popular OEM receiver that has been in many makes and models since 2003:
“Moving Baseline RTK is an RTK positioning technique in which both reference and rover receivers can move. Moving Baseline RTK is useful for GPS applications that require vessel orientation. [For example, the] reference receiver broadcasts [correction] data at 10Hz, while the rover receiver performs a synchronized baseline solution at 10Hz. The resulting baseline solution has centimeter-level accuracy. To increase the accuracy of the absolute location of the two antennas, the Moving Reference receiver can use differential corrections from a static source, such as a shore-based RTK reference station.”
Beyond such specialized applications, running the base at a high rate is a burden on radios or bandwidth. Additionally, as industry experts explain below, it is of little (or no) value and may only unnecessarily use excess bandwidth and burden broadcast radios.
When would you run the base at 1 Hz and the rover at higher than 1Hz, such as 5Hz, 10Hz, or more? When the base is static. That pretty much covers nearly all surveying, mapping, precision agriculture and construction applications. What is meant by high rate in the sensor/rover receiver and its RTK engine, in the context of such applications? As one of the firms interviewed stated:
“The number of RTK position fixes generated per second defines the update rate.”
For most of the surveying, mapping, precision agriculture and construction applications, that means base 1 Hz + rover 5 Hz or 10 Hz. Then there are specialized applications, such as structural monitoring and geophysical studies, that may run sensors/rovers at 20 Hz, 50 Hz or (though rare) as high as 100 Hz. Whether a higher rate is a default, or 1 Hz is the default, changing the rate is almost always a user-configurable option.
A general perception is that base-rover gear defaults to base 1 Hz + rover 1 Hz. However, as the experts below note, that is not necessarily the case — often the rover rate is higher by default.
By any other name…
The respective approaches, and their appropriateness for different end-use applications, may seem fairly straight forward. However, part of the confusion about the subject for end users comes from the wide range of terminology used to describe how high rate is applied across the industry.
The understanding of processing approaches is clear among GNSS engineers, and in specific terminology, but this rarely gets translated well or consistently in terms meaningful to end users in documentation or marketing.
Developers might have different approaches to achieving high-rate solutions and would of course not wish to completely reveal their cards, but many of the fundamentals are the same. A mutual recognition of parallel development among GNSS engineers, and the manufacturers they develop for, in that each strives to continually improve solutions, means that the high-rate element of RTK generally does not get much marketing hype.
Often, when high-rate RTK does get laterally mentioned — in manuals, marketing or labeled as configuration options in GNSS field software — the mix of terms can confuse the user. Such terms as extrapolation, prediction, update rate and solution rate could evoke a negative connotation to an end user who is used to hearing one set of terms, and they might view otherwise like terms as contrasting terms.
GNSS engineers do not have issues with mixed terms. As some indicated in their respective interviews, they seem a bit puzzled as to why anyone would misunderstand the subject, and how marketing spin might lead users to be confused.
In recent years, the subject seemed to get discussed a lot more than usual in various high-precision end-user social media platforms. Perhaps this was a natural progression in growth of understanding of the nature of GNSS among these constituencies, and a desire to know more about what goes on in those black boxes — a positive thing. There may also have been some instances of marketing nudge.
For whatever reason it became a subject of discussion, we heard from readers who asked us to look into it. So here, in alphabetical order, are insights from of the experts in this field. You can jump ahead to the specific section for your equipment vendor, but we encourage you to read through each; combined, they provide a more complete picture of the subject.
Bad Elf
With Larry Fox, VP for Marketing and Business Development
Larry Fox uses the Bad Elf Flex. (Photo: Bad Elf)
Bad Elf has long provided GNSS solutions for aviation- and mapping-grade field applications. Several years ago, the company introduced a survey-grade-precision system, Flex. It is offered with an option for a modest initial investment in the hardware, and an innovative token system for enabling and operating at centimeter precision.
Larry Fox has been in the industry for a long time and has seen the evolution of real-time GNSS. He is Bad Elf’s vice president for marketing and business development, but he also had a key role in the development of the Flex system. Fox said that, of course, high-rate RTK is supported. “We allow options up to 20 Hz on the rover if the user has this enabled.”
For the approach of 1-Hz base and higher rates on the rover, he said that Bad Elf does not have a specific term for this. “For purposes of description, I could refer to it as high update rate, but I suspect high solution rate is pretty much synonymous.”
Fox explained how the standard approach works. “The rover knows the location of the fixed base and therefore applies the same processing techniques by simply reusing the last received data.”
He also mused about various hypothetical scenarios. “Given that the converse is also possible — a slow data rate from the base, say, 0.2 Hz at the base and 1 Hz at the rover — is there fundamentally any difference?”
For many applications, Fox does not see a substantial advantage in running at higher rates: “I see no benefit for higher data rates in a static situation such as a survey. I would argue that in a survey workflow, one should allow the RTK algorithm to settle over the static shot being taken, as the RTK algorithm likely benefits from aging out some of the data it used while moving.”
He adds, “I would suggest that once you have occupied a point for a modest amount of time and you remained fixed, I can’t see any benefit. My argument here is that by the time you have leveled and prepared your collector of choice, any decent RTK receiver with a good sky portrait and good corrections will not observe any benefit.”
As for disadvantages and trade-offs, “More and faster data,” Fox said, “must be better, correct? Sarcasm included. Unless there is a tangible need for more samples, what is one going to do with all the extra data? I could have seen a possible argument that a single constellation receiver may benefit from averaging, but that could be a be a whole different subject as multi-constellation is now standard. Arguably, at a higher data rate one could capture more epochs and reduce the time on station. With multi-constellation receivers I am just not convinced that these techniques have the same merit they may have had in the past.”
Bad Elf doesn’t support higher correction transmission rates from the radio. “The current module only supports RTCM3 at a 1Hz rate,” Fox said. “Even if we could transmit faster, the payload required would exceed the capability of the message transmission rate of the radio. The battery life of a radio is directly correlated to the transmission duty cycle. The more you are transmitting, the less battery life you will have. I would argue this would impact the useful field time you would have without an external battery solution.”
Fox notes that any application where a rover is moving — such as on a vehicle or for machine control — could benefit from high rate. “I could see a potential application for drones,” he added. “I would want to have the epoch of an image recording very tightly coupled to the image captured. Fundamentally, an RTK drone’s imagery is only as good as that. If one was taking video at any reasonable framerate, a higher frequency RTK GNSS may benefit the geolocation of more individual frames with less extrapolation.”
What about rates higher than 20 Hz? “We have run our receiver up to 20 Hz on the rover side. Although there are units capable of even higher rates, I don’t have any data that would convince me that this is viable, for mapping or surveying.”
I asked about some of the misunderstanding out there about high-rate RTK, and Fox replied, “We can be creatures of habit and tie ourselves to beliefs that ‘this is the way I did it and it worked then.’ People should always ask themselves the question, ‘do I still need to do it this way?’ Again, there is the premise that more is better. I can’t tell you how many times I have seen people collect very high-rate data for lines and poly features only to decimate the data because it reduced performance, increased storage, or lowered the performance of the apps rendering the data.”
Emlid
With Svetlana Nikolenko, Lead Application Engineer
Photo:Svetlana Nikolenko with an Emlid GNSS receiver. (Photo: Emlid)
Emlid, a relatively new entrant to the market for high-precision GNSS, has made a splash with their line of affordable systems, such as the Reach RS2 rover and base-rover kits, and RTK systems for UAVs.
“All our devices support this,” said Svetlana Nikolenko, lead application engineer. “We do not have a special term for this, as it is simply a standard. We recommend 5 Hz and higher for a moving rover, but it can be overkill for a stationary one.”
Asked why one would want to run at high rate, Nikolenko explained, “The need to set a higher update rate depends on the rover’s velocity and acceleration. The higher the update rate, the more solutions per second are calculated. So, if you’re moving fast, the higher update rate simply allows you to keep your position current. If the rover is stationary, there are no issues with working at 1 Hz. Still, there is nothing wrong with running a stationary rover at 5 Hz or higher: it is excessive, but produces more samples with different satellite geometries.”
For moving applications such as UAVs, higher rates are of value. “It really depends on velocity,” Nikolenko said. “For example, if the rover is on a drone flying at a speed of 5-20 m/s and the update rate is set to 1 Hz, you won’t have the actual positions of the images. The higher update rate our devices have is 10 Hz, and at a drone speed of 20 m/s, even if you take photos each second (which might be a bit excessive), you’ll get accurate positions.”
Using an Emlid receiver in harsh conditions. (Photo: Emlid)
Emlid does not support a moving base. However, if there is a strong demand from users, they will consider adding this. For non-moving applications, Nikolenko said, an approach of broadcasting from the base at a high rate is excessive. “This increases the load on the radio (or any other connection link) because the base sends its position and corrections to the rover as often as it calculates it. Anything excessive simply adds load to processors and batteries.”
CHC Navigation
With Carlos Cao, Technical Manager for the Asia-Pacific region
CHC Navigation, or CHCNAV, has steadily grown as a recognizable brand of GNSS and other geospatial products internationally. While the brand might be new to some in North America, in some regions of the world CHC has a substantial share of the market, selling hundreds of thousands of units over the past 15 years. The company develops its own solutions, but also incorporates OEM components. In all cases, CHCNAV has provided high rate as standard from its earliest days.
Multi-constellation rover with tilt compensation. (Photo: Schrock)
Carlos Cao, technical manager for the Asia-Pacific region, said that his company supports the approach of broadcasting at 1 Hz and solving at higher rates on the rover. “For example, you can get coordinates every 0.2 seconds in the Landstar 7 Topo Survey software,” said Cao. “Meanwhile, with different OEM boards, RTK models and supported software, [the equipment] can also reach 10-Hz or 20-Hz static data recording and NMEA data output (including GNGGA coordinate data).” Their term for solving RTK solutions at a high rate on the rover is “high update rate.”
This can bring advantages, specifically for moving applications, Cao said. “When you stake out, the 5-Hz update rate brings faster coordinate updates, especially when surveyors walk quickly. When you survey by time during movement, you can get denser points; while you survey by distance, the accuracy will be better if you are at high speed. For example, speed is 6 m/s, and you want to survey a point every 5 meters; 1 Hz update rate cannot do this with high accuracy.”
When would 1Hz be sufficient? “Normally,” Cao said, “a 1 Hz update rate is enough for a topography survey because users won’t survey at a high speed, so our default setting is 1 Hz, though you can choose higher rates if enabled and as needed. Unless you are moving, however, such as when some surveyors mount a rover on a vehicle, there is no significant difference in the final results.” He added that running at high rates can drain the battery faster.
Broadcasting at higher rates has several major issues. “With more satellites launched, especially BeiDou, correction data becomes much larger,” Cao said. “It means that network RTK requires more data flow, and UHF radio RTK needs a UHF modem that can send data at a high rate. It is a very big challenge for base RTK.”
Meanwhile, notes Cao, “The rover could even have a correction age of 5 or 10 seconds, and it will use the previous package to calculate the position. Since 1-Hz base and 5-Hz rover can work without degradation of precision, there’s no need to change the base to 5 Hz.”
Other applications CHC supports often use higher rates. “Navigation, machine control and precision agriculture normally use a 10-Hz, 20-Hz or 50-Hz update rate,” Cao said, “because these devices work under high-speed movement status, especially navigation. Also, they need to combine with high-update inertial measurement unit (IMU) data. The max update rate is 50 Hz. Normally the application data for these uses is NMEA data output by COM port or TCP/IP protocol. For surveying applications, such as topography, 1-Hz base and 5-Hz rover is enough. For other applications that need higher rates, we also provide such devices.”
Hemisphere GNSS
With Kirk Burnell, Senior Product Manager
Kirk Burnell
“At Hemisphere, we simply refer to this as RTK,” said Kirk Burnell, senior product manager for Hemisphere GNSS. Burnell added that they do not have any special term for this — it is simply a standard.
We were discussing specifically the approach of solving on the rover at higher rates than the base corrections. “All Hemisphere RTK products can work in this way, meaning corrections can come in at 1 Hz or slower, and rover output can be at 1 Hz, 5 Hz or 10 Hz as the user sees fit and as the application demands.”
Hemisphere develops GNSS and multi-sensor solutions for many industries: surveying, construction, agriculture and more. While Hemisphere has its own branded survey rovers, its OEM boards are in many other popular rover brands, makes and models. So, whichever you are running, you get high rate as a standard option.
Hemisphere’s receivers are frequently used in construction applications. (Photo: Hemisphere GNSS)
Burnell explained further that this is a given in the industry. “This is the standard expectation for RTK amongst our competitors, based on their product offerings, documentation, and standard operation. When describing RTK, the expectation is for 1-Hz base-station corrections, and a user-selectable rover output rate. Understandably, when people discuss RTK in technical terms, they may use different phrases to help distinguish between different techniques, which is why there might be different phrases out there. For us, it is simply RTK.”
As for the benefits of high rate, Burnell explained that inside the receiver, the measurement engine and RTK algorithms are typically running at 10 Hz or 20 Hz, and the selected output rate of the solution does not impact the RTK engine’s performance. The receiver will fix as fast and as accurately as possible given the quality of the RTK correction stream. Survey users could see a smoother update rate on their screen using 5 Hz compared to 1 Hz. This makes such tasks as leveling the rod or watching the change in height on screen while moving from the bottom to the top of a curb feel more natural. The user is not waiting an extra second each time to see the stability of the output. “A 5-Hz update rate is a good tradeoff for smooth workflows versus consuming CPU and battery power, compared to 10 Hz or 20 Hz,” he explained.
Would there be a disadvantage to simply running the rover at 1 Hz? “When using a 1-Hz update rate to the data collector, there will be fractions of a second spent waiting for the screen to update,” Burnell said. “Over the course of a day’s work, this could add up to a few minutes of extra time spent. In reality, this does not impact the ability to deliver a job on time. If the user does not feel impeded by the slower update rate of the screen, there is not a significant difference between the quality of the data, comparing 1 Hz and 5 Hz.”
Addressing one misconception that some users have about high rate, that it might significantly improve precisions, Burnell clarified, “For classic RTK surveying, outside of the workflow differences for the surveyor, the same quality of data is produced.”
Disadvantages? “Once you move beyond 5 Hz you start to exceed people’s hand-eye coordination ability, and the benefits diminish,” said Burnell. “Additionally, the data collector has a lot of communication to process, data to unpack, calculations to do, and screen refreshes to accomplish. Faster than 5 Hz leads to stresses in these aspects of the user experience, and ultimately can consume the data collector’s batteries at a faster rate.”
There have been instances of high rate being marketed as enabling users to save a lot of time, but as Burnell noted, this might actually be a potential problem. “There could be a false sense of having no latency, which could lead to rushing through a job, increasing the chances of making a mistake. A surveyor’s observations and measurements are the currency of their trade, and they should be made with care and attention to the work being done. Most surveyors take pride in a job well done.”
Regarding the other scenario, broadcasting at a high-rate and solving on the rover at the same high rate, “This mode of RTK operation has little or no benefit and a host of drawbacks,” Burnell said. “The biggest issue is the volume of data. For a multi-frequency multi-GNSS solution, there is an immense amount of data to be transmitted from the base to the rover. Running a link at 5 Hz requires huge data bandwidth generally only possible using an internet link as compared to a 450-MHz or 900-MHz radio link. Drawbacks for internet links are data volume costs. For dedicated radio links, the issue is most likely to impact radio range. To send five times as much data, the over-the-air baud rate needs to be five times greater. This means that the energy per bit of data is five times less when at high speed. The signal will lack the ability to punch through obstacles. While some may suggest that having five times as many corrections reach the rover compensates for this, some radio protocols can be configured to transmit multiple retries with 1-Hz data.”
However, there are advantages to running at higher rates for specific applications, Burnell said. “If data is being collected in a kinematic fashion as compared to shooting individual points, there will be more detail when collecting at 5 Hz. For example, driving along a road with a receiver mounted to the roof, in 1 minute of driving there will either be 60 measurements at 1 Hz or 300 measurements at 5 Hz. For many non-survey applications, this is critical. For example, at highway speed, 1-Hz data means 1 point every 30 meters (100 feet) or so. In machine control, the systems are not relying on hand-eye coordination and reaction time, and 20 Hz or 50 Hz are common speeds. Autonomous applications also typically use between 10 Hz and 50Hz for GNSS, and often combine this with 100-Hz or 200-Hz IMU data. Aerospace and defense applications have demanding conditions and use 100-Hz to 200-Hz IMU data to navigate, often combined with 1-Hz, 10-Hz or 20-Hz GNSS data.
There are even some applications for which it is warranted to broadcast corrections at rates slower than 1 Hz. “One example was a user in Japan, where radio links are often throttled to 4800 baud,” said Burnell. “They were looking to see how to slow down corrections to less than 1 Hz so that they could take advantage of multifrequency multi-GNSS RTK. Another example: I recently asked for some 10-Hz rover data for analysis. With very large files, analysis took much longer — I wished I had asked for 1-Hz data!”
Hexagon | NovAtel
Hexagon | NovAtel is a prominent tech firm providing positioning, navigation and timing (PNT) solutions for multiple industry segments, including defense, surveying, construction, agriculture, autonomy and more. While GNSS is a core technology, NovAtel develops multi-sensor systems (including inertial) and has a broad reach with its OEM products. Surveyors, for instance, might not be familiar with NovAtel first-hand, but have likely used its technology via NovAtel’s many OEM customers.
Iain Webster
Iain Webster, senior director of Geomatics and Software Engineering for NovAtel, said that not only does NovAtel support high-rate RTK, but the customer can choose the position output rate desired — 1 Hz, 5 hz, 10 Hz, 20 Hz, etc. — and the receiver will output RTK positions at that rate.
“We distinguish between a matched solution (where a correction is matched with a rover observation at the same time tag), and a low-latency solution, where base observations are extrapolated for position computation at the rover,” Webster said. He provided a description from a company manual:
“The RTK system in the receiver provides two kinds of position solutions. The Matched RTK position is computed with buffered observations, so there is no error due to the extrapolation of base station measurements. This provides the highest accuracy solution possible at the expense of some latency, which is affected primarily by the speed of the differential data link. The MATCHEDPOS log contains the matched RTK solution and can be generated for each processed set of base station observations.
The Low-Latency RTK position is computed from the latest local observations and extrapolated base station observations. This supplies a valid RTK position with the lowest latency possible at the expense of some accuracy. The degradation in accuracy is reflected in the standard deviation. The amount of time that the base station observations are extrapolated is in the “differential age” field of the position log. The Low-Latency RTK system extrapolates for 60 seconds. The RTKPOS log contains the Low-Latency RTK position when valid, and an “invalid” status when a Low-Latency RTK solution could not be computed. The BESTPOS log contains either the low-latency RTK, PPP or pseudo range-based position, whichever has the smallest standard deviation.”
NovAtel does not brand this as a specific feature — it is just a standard part of its RTK solutions, but the company refers to it in their documentation as a “low-latency” solution.
The main benefit of this solution, Webster explained, is for kinematic users to allow better representation of their actual trajectory (such as in applications on moving vehicles). “The higher the dynamics, the more impact the latency of the matched solution will have to the point that we recommend the low-latency solution to all but specialist customers with known static positioning needs. For surveyors, there may be improved workflow with the low-latency solution as they will be able to move from point to point more quickly.”
NovAtel produces GNSS and inertial hardware and software, including OEM boards, for multiple applications. (Photo: NovAtel)
Webster noted that for applications where the rover is static for observations, 1 Hz can be fine, but for moving rover applications — kinematic — running at 1 Hz is probably unacceptable, so low latency is quite standard.
Additionally, he pointed out, there are applications where longer periods between corrections may not necessarily be detrimental. “Note that some manufacturers, including NovAtel and Leica, offer the possibility of using PPP corrections to extend RTK solutions beyond, for example, a 60-second timeout,” Webster said. “There are various proprietary methods to achieve this, but ultimately the RTK solution could be extended without limit in this way.”
Are there tradeoffs to using extrapolation or other high-rate approaches? “With corrections coming in at 1 Hz,” Webster said, “there is very little error over that period, so for most users, there is little disadvantage and perhaps some productivity advantage with a higher rate. If there is any trade-off, it is between getting the highest accuracy possible versus the lowest latency solution.”
As for the other scenario — the base broadcasting at greater than 1 Hz and the rover solving at greater than 1 Hz — “There is little advantage,” Webster said, “except in some specialized applications such as when the base is moving (called moving baseline) to provide a cm-level baseline between the base and the rover for relative positioning. For typical surveying applications with a static base, the rover would have to wait until the corrections arrived before outputting a solution. Other downsides include increased bandwidth on the communication link and more loading on the rover CPU, meaning lower battery life.”
What are the non-surveying applications where a high rate (in either scenario) can yield a specific benefit? Webster noted that, in fact, they deal mostly with non-surveying applications. “Most use cases need 10 Hz or 20 Hz for machine control or precision ag. We do have some very specialist applications that have required up to or beyond 100 Hz — but it is often best in those cases to do a GNSS/inertial navigation system (INS) solution and use the IMU to output at that a high rate. As previously mentioned, there are other specialist applications where the base is moving. In this case, we run a matched solution at a high rate between the base and the rover.”
Leica GeoSystems
With Xiaoguang Luo, Senior Product Engineer, GNSS Product Management Group
Rover with calibration-free tilt compensation and camera-based offset point capabilities. (Photo: Schrock)
Leica Geosystems (part of Hexagon) has been a major global developer and manufacturer of GNSS systems for multiple disciplines for several decades, introducing its first GPS receiver, WM101, in 1985. Since then, Leica has been among the leaders in GNSS receiver innovation, including integrated systems such as a rover that incorporates calibration-free tilt compensation and an image-point capture feature (GS18 I). Therefore, it is no surprise that for Leica Geosystems equipment features high-rate RTK as standard.
Xiaoguang Luo is a senior product engineer in the GNSS Product Management group at Leica Geosystems. He confirms that this option is supported in all Leica Geosystems RTK rovers of the current product portfolio, and this option is enabled by default in the Leica Captivate (surveying field) software. A term Leica Geosystems uses is prediction for its high-rate RTK approach.
Xiaoguang Luo
The standard positioning rate is 5 Hz on the rover. “As far as GNSS processing is concerned, there is no fundamental need to go to higher positioning rates,” Luo said. “The need for high rates is mainly driven by applications. For example, we are using the 5-Hz position update rate at the rover by default for an improved staking workflow and user experience. The 10-Hz rate is also supported in Captivate, for example, when streaming NMEA messages.” He added that 10 Hz is supported for other applications, such as structural monitoring, and 20 Hz for machine control.
As for the advantages of a rate higher than 1 Hz, Luo said that working at high observation and solution rates enables the possibility of modeling fast-changing error effects with a period below 1 second, and allows for high-rate non-surveying applications such as bridge monitoring. Does a high rate have any significant effect on the final results? He said that it strongly depends on the use case where high-rate observations and positions are involved. In addition, the quality of prediction also affects the final results.
Bernhard Richter
By this he means that while the standard approach for applications where the base is stationary, such as surveying, can work so well with a base data rate at 1 Hz and rover at 5 Hz, the key conditions do not change much over a single second.
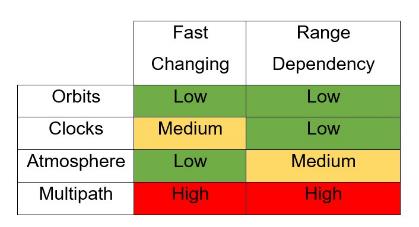
Luo’s colleague Bernhard Richter, vice president of geomatics, explained it. “To understand this, you need to separate the elements of corrections into those that are fast changing and range dependent (see the graphic below). If the errors change slowly, then they can be estimated and predicted very well. Or, if the range dependency is low, errors could come from a different source than the base station. If the range dependency is medium or high, then the corrections are more difficult to estimate on the rover side, but if such errors change very slowly, they can still be predicted very well with the precondition that corrections have been received at least once.”
The rate of change and dependencies for the elements of corrections. (Source: Leica GeoSystems)
You’ll notice that multipath is high in both regards. This brings up another misconception about high-rate RTK — some users have an expectation that it will improve their performance in limited sky-view situations (like thick tree canopy) or high multipath environments. This is not so. Any improvements in such environments come from having more satellites, more observations, and more modernized signals. With regard to high-rate and multipath, Richter said, “It is anyway futile, since multipath decorrelates so quickly that the advanced mitigation has to happen both in an analog and a digital way on the rover.”
While there are benefits to running at high rate, such as for staking, a balance has to be struck — for instance, in not running it at too high a rate. Luo outlined disadvantages that must be considered when performing high-rate RTK.
High processing load and battery drain, particularly with multi-constellation and multi-frequency RTK.
High temporal correlations between observations, which may not be considered in a sophisticated manner in the RTK algorithms.
High base rates provide challenges for the RTK data link devices, such as radios.
In addition, he noted that while any kind of predictive solution will introduce some amount of error, that would be so small in, for instance, a base data rate at 1 Hz and rover at 5 Hz solution, as to not even be noticeable in the positioning results.
Septentrio
With Bruno Bougard, Research and Development Director
Bruno Bougard
“Our rover solution computes RTK up to 100 Hz,” said Bruno Bougard, R&D director at Septentrio. “Update rate requirements for industrial machine control applications are typically 20 Hz. This is necessary to capture the motion dynamics. Also, it is not only the update rate that matters in those applications, but also the latency, which should be low (<20 ms typically) and constant.”
Septentrio NV is a designer and manufacturer of high-end multi-frequency GNSS receivers and integrated solutions. Markets they serve include surveying, mapping, construction, science, timing, agriculture, marine, autonomy, and more — all with specific applications where high-rate RTK may be employed They also provide OEM boards and modules for further integration by others.
Surveying users for instance may be familiar with their Altus line of rovers, such as the NR3, where high rate is a standard option. “There are new applications where a higher update rate is required,” said Bougard. “Surveying with UAV, using photogrammetry or lidar scanning requires at least 10Hz. In mobile mapping in general, RTK-INS solutions such as SPAN, Applanix or Septentrio SBi, require update rates up to 200Hz.”
Bougard acknowledged that manufacturers use many terms for their high-rate solutions. “Some may be used to masquerading a low-rate solution as a high-rate one. This is not what we do. The rover observables are captured at high rate and can be up to 100 Hz. The rover RTK filter is also run on high rate. Fixed base-station data does not have to be high rate. 1 Hz is typically enough. For moving base applications — for example, when the base station is on another vehicle, and we want to compute the baseline between the moving base and the rover — 10 Hz is required.”
Bougard said that the benefit is to track the motion of the rover. This is critical in machine control, but also relevant for new survey flows (such as UAV-based and mobile mapping). The disadvantage, he explained, is that it requires higher CPU loads. “Suppliers, who focus on cost, tend to compromise on this, notably running higher rate only for a subset of the constellation or signals. We use them all.”
Is running the base station at a higher rate advantageous? “It is possible to increase the output rate of our base station correction stream but, as explained, this is not needed if the base is static,” Bougard said. “This is applicable to moving base scenarios as explained above. Indeed, if you increase the base-station correction rate, the bottleneck becomes the datalink.”
Tersus GNSS
With Xiaohua Wen, Founder and CEO, Tersus GNSS
Xiaohua Wen with a Tersus GNSS receiver.
Xiaohua Wen, based in Melbourne Australia, is the founder and CEO of Tersus GNSS, another new entrant in the centimeter-grade GNSS market. One distinction about Tersus is that the company has developed and produces its own GNSS boards, instead of using OEM boards from other companies. Tersus implements its own tech, including GNSS receivers and IMUs in its own survey rovers, such as the Oscar, and for other high-precision applications. Additionally, it produces OEM boards for integration by others. Tersus entered the market with full multi-constellation support and, of course, high-rate RTK options, and has recently announced a PPP (precise point positioning) service.
“Our RTK boards support up to 20 Hz,” said Wen. “Often, surveyor will choose 5 Hz. We do a 5-Hz solution in this manner: the baseband takes raw measurements at a wanted moment, say at 1.2 s or 1.4 s, and RTK calculates solutions with the raw measurements. We understand that some older solutions might simply extrapolate or interpolate based on a position and velocity sequence, which is sometimes called predicted RTK or extrapolated RTK (though those terms get used in different ways by different developers). That is not how we approach our RTK solution updates. All Tersus RTK boards also support a maximum 20 Hz raw measurements outputs.”
Multi-constellation rover with calibration-free tilt compensation. (Photo: Schrock)
We asked about some of the advantages users may envision of high-rate RTK in general. Wen said there may be little or no gain with regard to faster initializations. Likewise, there is no significant gain with precision and accuracy. However, Wen said that higher rates can sometimes improve staking workflows. “For example, in the case of our Oscar rover with tilt compensation, the RTK outputs solutions at 10 Hz, while the IMU samples at 100 Hz. Oscar calculates the pole tip’s position at 10 Hz, aligned with the RTK solutions, and the data controller or tablet displays the point of the pole tip on the screen. We find that the point better refreshes at 2 Hz or higher to respond to the pole tip movements without noticeable lagging.”
That movement is an example of a key value of high rate,“Speed or movement,” Wen said. “For surveying applications, I would say that 1 Hz could suffice, considering the characteristic very low speed. Usually, applications like machine control and precision agriculture require an RTK update rate at 5 Hz or higher. Some UAV applications may use a 100-Hz position update. Most of these applications use an INS+RTK solution. With INS, it’s easy to get a 100-Hz position update, while for an RTK solution, a rate of 20 Hz is probably enough.”
Wen said that broadcasting corrections at a higher rate is pointless for most applications, “because the base data is highly correlated in the short term. If it’s a moving base, the high-rate base data would make some sense. Otherwise, it just imposes a greater load on communications and computation, with almost no gain.”
Topcon Positioning Systems
With Alok Srivastava, Director of Product Management
Alok Srivastava
“It is a standard option in our rovers,” said Alok Srivastava, senior director of Product Management (PM) at Topcon. “Around the time I joined the PM team, in 2010, the decision was made to make 10 Hz the standard, though this is user configurable and can be 5 Hz, 20 Hz, up to 100 Hz.” He explained that faster rates have been available through several generations of their receivers.
Typical applications consist of a static base and a moving rover. Fast-moving applications can benefit from higher rover position update rates since the RTK engine is computing real positions at a faster rate. Higher rates on the rover side provide accurate changes in position that can be missed by interpolating between positions computed at a slower rate.
A Topcon multi-constellation rover with tilt compensation. (Photo: Schrock)
High update rates on a base station do not provide advantages except in rare cases where the base is moving. While rovers are computing movements of the rover antenna, base stations are providing GNSS satellite corrections. A rate of more than 1 Hz for a static base station does not benefit rover accuracy; it only creates a burden on the communication between base and rover. Base and rover communication needs to be optimized to reduce bandwidth requirements. This is especially true as we continue to add constellations and signals to GNSS solutions.
Sufficiently high rates have been standard on Topcon rovers for a long time. Srivastava would rather see more focus put on other aspects of GNSS — such as interference, spoofing, the impacts of 5G, precise point positioning (which Topcon provides through its Topnet Live service) and sensor integration. “In many of our construction applications, we have IMUs,” Srivastava said. “When an application has an IMU for tilt compensation or for machine control, the IMU and GNSS complement each other. In kinematic mode, the IMU can help reject outliers.”
“High rate can be considered a common default mode of operation,” said Stuart Riley, vice president, Technology – GNSS, Trimble. “Typical rover position solution rates are 5 Hz, 10 Hz and 20 Hz.”
Trimble is one of the pioneering companies in GPS and GNSS, and Riley has been directly involved in the evolution of the company’s GNSS solutions for more than two decades. He has seen a lot of change, and in noting the nature of key technological advances, offered this intriguing observation about high rate: in many ways it has become less relevant.
“There have been considerable advances in RTK technology in recent years that make many of the earlier concepts related to how base and rover data should be combined for baseline processing largely irrelevant,” said Riley. “Most recently, survey receivers have included INS support for tilt compensation applications, and these receivers have available high-rate IMU data — at a much higher rate than GNSS observables — which drive the final GNSS/INS integrated solution. Thus, the rover GNSS data rate is not so important.”
Riley noted another relevant technology that Trimble has implemented: the use of precise satellite clock and orbit corrections — such as from the Trimble RTX precise point positioning (PPP) service — to augment RTK when there is a loss of the base correction stream. The implementation of PPP is broadening across the industry, and the company was an early implementer of a global service. It has the RTX-based xFIll feature that runs on and high-end survey receivers. One of the misconceptions about PPP services such as xFill is that it is just there to “take over” should the RTK or NRTK corrections be interrupted. Yes, it does that as well, but to be able to do that, it is running all the time, simultaneously with the RTK, so the rover is getting these enhanced PPP service clock, orbit and other data. This improves what the rover can do. “The emphasis in modern survey receivers,” Riley said, “is based more on the availability of rover data, and a fundamental base data rate of, say, 1 Hz, is all that is required.”
Along with various advances in the rover RTK engine, the GNSS constellations have expanded considerably, requiring increased bandwidth for the corrections from base to rover. “Our products can use various communication technologies to transmit corrections, such as Wi-Fi, cellular, and UHF (450 MHz or 900 MHz) radios,” Riley said. “Maintaining a 1-Hz correction rate enables all the GNSS observables to be broadcast from the base, providing a suitable highly compressed data format such as when Trimble’s proprietary CMRx format is selected.”
Many terms are used in the industry, and they typically refer to some proprietary aspect of an RTK engine. Riley said that a generic term would simply be high update rate. “Providing the position is based on the most current phase observables at the rover, a low latency solution is possible,” he said. “Thus low-latency solution goes hand-in-hand with a high update rate. Predicted RTK may refer to an old method where the static base corrections are propagated forwarded to account for radio latency and thus synchronize base/rover data. This is not used in modern PVT (position, velocity, time) RTK engines.”
High rate on the rover is standard, but what benefits should the user expect from it? “A fast update rate provides the best user interface experience in the field, in particular for stakeout,” Riley said. “Quite simply, nobody wants to be working with a laggy display. For survey field work, 5 Hz is typical. Other applications, such as machine control, benefit from higher update rates where a default of 10 Hz would be used, with options for higher rates.”
If the user chooses 1 Hz on the rover, what would be the downside? “Running at a 1-Hz rate is not really suitable for stake out,” Riley said. “For occupying static points, 1-Hz updates would suffice, as a typical occupation has a minimum time of 1 or 2 seconds. Very high rates for survey applications do not really buy anything in terms of field look and feel or performance.” I asked him about any points of diminishing returns, and he responded, “The higher the rate, the wider the measurement bandwidth (that is, the noise increases — you cannot get something for nothing), so in fact going for an unnecessarily high rate would start to be a disadvantage. For example, there would be no advantage to using a 50-Hz or 100-Hz rate for a land survey application. There is a relationship between measurement bandwidth and position noise.”
When is a high base rate a good idea? High rates are supported for some machine control and “moving base” applications where the reference frame has to move with the moving base, Riley said. In this case, the base and rover observables must be synchronized and the final solution has a fundamental latency depending on the base rate. For this reason, moving base rates are more typically 10 Hz or 20 Hz. For a static base, it is possible to use a higher rate. However, as Riley noted, “It’s more likely that a lower rate such as 0.5 Hz might be desirable to accommodate the radio when using repeaters (time multiplexing the data) or low data rates. There are disadvantages to high base rates, mostly related to radio bandwidth. Other factors, such as ‘high rate = more radio transmit power’, may need to be considered (affecting battery life).”
Are there other cases for even higher rover rates? “As mentioned, machine control applications use higher rates — necessary to reduce position latency in control loops,” Riley said. “Other applications such as UAVs and autonomous driving clearly benefit simply because of the speed of the platforms (higher dynamics). Precision agriculture is an excellent example of machine control, where auto guidance is used. Although high rates are possible, nearly all applications manage perfectly fine at rates up to 20 Hz. A more important consideration is system performance in terms of positioning accuracy and convergence times, which is dependent on the technology used in the PVT engine, such as Trimble ProPoint technology, rather than the correction stream data rate. ProPoint also includes xFill, as mentioned earlier, which provides centimeter-level backup for continuous operation when RTK or VRS correction streams are interrupted.”
Other Manufacturers
This was only a sampling of the developers and manufacturers, but it should be noted that several of the above firms produce OEM boards featured in dozens of other brands and models, such as Carlson and GeoMax. To try to list them all would be a challenge and might be missing a key point: high rate is quite standard, is not big news anymore, and you probably have it by default (or optional) no matter what system you are using.
Hypeful
As the insights the from industry experts above show: high rate can be essential for many applications, but unnecessary for others. It seems more about user experience (staking workflows or moving rover) than some way to seek higher precision.
Additionally, to borrow the gaming term hypeful, some users believe (or have been led to believe) that running at high rate will yield higher precision or work some kind of magic in dense tree cover or high multipath environments. Some may argue that it could get a result faster, but in practical terms even that might not be the case.
High rate has been around for a long time. And like any tech, has gone through different development and adoption phases. Think about automatic transmissions for motor vehicles; they have been around in one form or another for more than a century. There was a period in the mid-20th century where the development of different approaches was promoted in marketing campaigns with fanciful product names, like Durashift, Presto-Matic, Geartronic and Torque-Flite. But rarely do you see auto transmissions highlighted with such marketing flourish since then.
High-rate RTK was never singled out like that; it is common, and any differences are mostly in how it has been adapted for different applications. I suppose a firm could choose to emphasize it for marketing purposes and give it a buzz name like “Turbo Thrusted RTK”, which his fine for marketing purposes (albeit a bit “cheugy”). Every developer and manufacturer will have slightly different approaches, but if you believe, or are led to believe, that any represent high-rate fundamentals exclusively, that would be inadvertently misleading, if not subtle gaslighting.
As one of the experts said, “It does not really matter what manufacturers claim or don’t claim. You cannot beat physics. You can only understand and manage the physics.”
Coolness Ahead
While high-rate might seem a bit old hat, where GNSS development is going is not. The developers we interviewed are more interested in highlighting their complete high-precision solutions. For example, adding inertial measurement units (IMUs) for no-calibration tilt compensation, additional sensors for imaging (and likely soon, lidar), and multiple real-time GNSS solutions complimenting RTK, such as L-band precise point positioning (PPP).
The “high-rate” that is truly exciting is that of R&D, multi-sensor integration, automation of certain elements of workflows, artificial intelligence and multi-constellation/multi-signals.
Flipping the traditional scenario, in which car racers risk their lives on a racetrack, the Indy Autonomous Challenge (IAC) aimed to help save lives by improving collision avoidance systems, train future automotive engineers, and make the public more comfortable with autonomous cars. Held Oct. 23 at the Indianapolis Motor Speedway and organized by Energy Systems Network, the race saw 21 universities from nine countries forming nine teams to compete for a $1 million grand prize. Following in the footsteps of the DARPA Grand Challenge, first held in 2004 and later renamed the DARPA Urban Challenge, the IAC was the world’s first high-speed autonomous race. The winning team was TUM Autonomous Motorsport from the Technical University of Munich, Germany.
All competing teams were given the same identical vehicle to work with, a Dallara AV-21, modified to carry no one in the cockpit and equipped with two Hexagon | NovAtel PwrPak7-Ds multi-frequency, multi-constellation GNSS receivers, six cameras (two of which faced backward), three lidar scanners and four radars. Each team had to develop its own autonomy-enabling software stack, including the algorithms and neural networks. All the components, except the computer, had to be commercial-off-the-shelf, available on the market. No sensors could be custom-made.
Since 2001, Dallara has been the sole supplier of the Indy Lights series, a championship to prepare drivers for the NTT IndyCar Series. The Dallara AV-21 is a collaboration between Dallara’s Italian headquarters in Varano Melegari (Parma) and Dallara IndyCar Factory in Speedway, Indiana. The new car offers a modern, stylish appearance and provides the proper training required for drivers as the final step on the ladder to the NTT IndyCar Series.
The process by which the automated vehicle sensors and computers were fused into a singular package and integrated into the AV-21 was led by Clemson University’s International Center for Automotive Research’s Deep Orange 12 (DO12) project. The Deep Orange process mirrors that of automotive original equipment manufacturers (OEMs), and the DO12 project scope allowed for engineering and innovation across multiple subsystems. Student groups within the DO12 team explored solutions within and across multiple subsystems, including:
vehicle-to-vehicle communications
perception systems
onboard computing
drive-by-wire chassis control systems
vehicle dynamics
vehicle-to-infrastructure communications
powertrain design and integration
vehicle demonstration based on high precision GPS.
Hexagon’s Autonomy & Positioning division provided GNSS receivers and subject-matter experts to the Deep Orange 12 team. The team architected the sensor kit for the Dallara reference vehicle, which AutonomousStuff then replicated 10 times. The team did not compete in the IAC to avoid a conflict of interest and allow students to work closely with competitor teams from universities around the world. The PwrPak7-E1 contains a MEMS IMU to deliver Hexagon | NovAtel’s SPAN technology, a deeply coupled GNSS + inertial engine in a single-box solution. Each GNSS receiver has two antennas to provide heading. The Deep Orange 12 team used HxGN SmartNet RTK corrections, which brought the accuracy down to a few centimeters.
Without developing a driverless decision-making algorithm, Clemson students tested the vehicle with the help of a high-precision positioning system. They developed a control algorithm that can track the optimal line around the Indianapolis Motor Speedway such that all vehicle systems could be validated in a simulated racing environment. Data from these tests were shared with the competition teams to aid in their development of driverless algorithms.
Energy Systems Network will host a head-to-head, high-speed autonomous racecar passing competition at the Las Vegas Motor Speedway on Jan. 7, 2022, during the Consumer Electronics Show. Several of the teams that competed in the IAC, including the winner and finalists, will participate. The primary goal is to advance technology to speed commercialization of fully autonomous vehicles and deployments of advanced driver-assistance systems.
“Original equipment manufacturer (OEM)” is a widely used but poorly defined term. In general, it refers to a manufacturer that provides components or sub-assemblies to another one for use in the latter’s end products. In the GNSS industry, the purchasers of OEM boards typically are manufacturers of products that require positioning or navigation capabilities, such as guidance systems for tractors, UAVs or automobiles. Sometimes, such manufacturers integrate the OEM GNSS receivers with other sensors, such as inertial measurement units and lidar devices. Often, the OEM also will provide technical support to the integrator.
Much of the OEM business is not visible to the end user of the equipment that contains OEM components, let alone to the casual observer, because those components are “inside the box,” such as a guidance system, and “the box,” in turn, is under the hood or in some other hidden place. There is almost never a sticker on the outside analogous to the one that says “Intel inside” on many computers to distinguish the Intel CPU inside from, say, an AMD processor. Furthermore, OEM sales are typically obscured by confidentiality provisions in OEM licensing agreements that also address issues of branding, payment, quality assurance, and the timing of deliveries.
Integrators can choose from a wide variety of OEM GNSS boards depending on their intended use; the environment in which they will operate; their performance requirements; and their size, weight, power consumption and (of course) cost. OEM GNSS boards range from development kits that assist users to integrate GNSS into their product design to differential, multi-frequency, and, increasingly, multi-constellation boards.
In the following pages, six GNSS OEM manufacturers address these questions:
How do you define OEM?
What distinguishes your latest generation of OEM receiver boards from previous ones?
What are the markets for your GNSS OEM receiver boards? Which ones are growing the most?
Additionally, each one showcases a product.
JAVAD GNSS Ready for Lift-Off
JAVAD GNSS has been transitioning to a new position in the market since the passing in May 2020 of its founder, president and CEO Javad Ashjaee, a giant of the GNSS industry. For several decades, the company eschewed mass production for such markets as the automobile industry and cellular phones, choosing instead to focus primarily on high-accuracy surveying applications.
“Our founder really loved the surveying market, created a lot of technology, and drove the rest of the industry through the evolutionary process to where it is today,” said Tom Hunter, the company’s chief sales officer. “You can see a little bit of JAVAD GNSS in just about any GNSS-based land survey product on the market today.”
At the heart of each of JAVAD GNSS’ OEM boards is a proprietary ASIC. The boards it sells are the same ones it uses in its own reference stations, land survey products and marine systems, Hunter said. Aerospace is a key focus, an industry that requires very high accuracy, precision and reliability despite operating in environments of extreme shock, vibration, acceleration and temperatures.
Photo: Javad GNSS
“Our successes have been in working with many of the companies that build these very large launch vehicles used to carry heavy payloads into orbit,” Hunter said. “Our customers are companies such as Orbital, Northrop Grumman and SpaceX.” Those heavy-duty launch vehicles, he pointed out, must also follow a pre-described flight path. “You don’t want to start another world war because another country sees something heading its way.”
Tracing All Components. JAVAD GNSS’ boards “have complete component traceability,” Hunter said. The company does not buy any of its components from brokers. “We have to buy either directly from the manufacturer or from the manufacturers’ designated distributor, and it has full part traceability in our own factory in San Jose, California.” Should a component ever fail, the company could quickly trace when and where it was made. “That’s very important when we’re dealing with customers such as NASA, the Air Force or Boeing, because the safety of flight depends upon the performance and the quality of the product.”
The company will soon supply a receiver that will spend about four and a half to five years in orbit on a cluster of small low-Earth-orbit satellites, Hunter said. (See “JAVAD Board Guides ESA Vega Mission” below.)
To make sure none of its products are exported illegally from the United States, JAVAD GNSS also traces where each one ends up. “We know where every one of those boards is.”
JAVAD GNSS must guarantee its aerospace customers, which have invested millions of dollars in designing their systems, that each model of its devices will remain exactly the same. Hence, it bought from some manufacturers their entire inventory of certain components, in case they discontinued making them, and certifies each
JAVAD GNSS’ products are more expensive than those from other manufacturers because they are better, Hunter claimed. “We use really high-performance, temperature-compensated oscillators in our boards to make sure we have precise timing. We use a custom ASIC that we designed and built. Our receivers have 864 channels, so they can receive just about anything broadcast in the L-band.” The company constantly upgrades its devices to match modernization of the signal structures.
“I can remember when the rest of the industry was saying, ‘You have a 12-channel GPS receiver? You’re nuts! I mean, who uses that much information?’,” Hunter recalled. “Today, we’re using every signal that comes out of GPS, whether it be L1, L2, L5, L1C, and the same thing with all of the GNSS constellations.” For example, when Japan will begin to broadcast its new QZSS signal soon, “we’re ready not only to find it, but to track it, decode it, and utilize it for position and timing solutions.” Anti-jamming and in-band interference rejection are standard in JAVAD GNSS’ products, while those from other manufacturers require external filtering or different types of antennas, Hunter pointed out.
New Leaders and Markets
After Javad Ashjaee — JAVAD GNSS’ founder, president and CEO — died in May 2020, Tom Hunter, who co-founded Ashtech with Ashjaee in 1987, returned to the company after a five-year retirement.
“He left the company with an awful lot of technology, a lot of patents, and a lot of people who knew how to design and build products, not only for today, but for the future,” Hunter explained. “They needed some guidance.”
So, in January, Nedda Ashjaee — Javad Ashjaee’s daughter and his close collaborator for the previous 25 years — and the board of directors asked Hunter to rejoin the company. “They said that they wanted me to help them make sure that we can be on a path where we can use our core technologies and enter into new market segments and new marketplaces.”
Hunter added, “We made some changes to how we introduce surveying products into the marketplace.” The company no longer sells its products directly to end users. Rather, it goes through a new process and channel for getting products into the marketplace. It also brought on board a new chief technology officer this summer who will be driving engineering efforts. “We are becoming market driven. And to do that we needed to expand our marketing, sales and engineering capabilities. We are changing every aspect of the company,” Hunter said.
JAVAD GNSS actually consists of two companies in San Jose: JAVAD GNSS, which designs, markets and sells products, and JAVAD GNSS EMS, which manufactures them. It also has a presence in Moscow — the company hired many engineers following the collapse of the Soviet Union, many of whom had worked on GLONASS. “Javad looked at that as an opportunity to hire them and use them to develop a multiple constellation receiver,” Hunter recalled. However, as a subcontractor for U.S. government projects, it is much easier for JAVAD GNSS to operate on U.S. soil with engineers who are U.S. citizens. “We’re expanding our San Jose operation to include on-site engineering development, not only in RF, but also in digital signal-processing software.” The company will continue to receive schematics from its Russian subsidiary. “Instead of exporting technology, we’re importing it.”
JAVAD GNSS is now moving into markets that did not interest Javad Ashjaee. It recently launched new products in the machine control, marine navigation and accurate heading markets, as well as the agricultural and construction markets, with integrated sensors that can be readily installed on various machines. Other GNSS manufacturers have been producing such devices for decades, Hunter acknowledges. However, he adds, “ours will be able to use multiple sources not only for satellite- and terrestrial-based corrections, but a combination of those.”
A JAVAD OEM GNSS board is at the heart of the navigation system of the Vega space vehicle developed by the European Space Agency to launch small satellites into low Earth orbit. It provides great flexibility of mission at an affordable cost and represents the European solution for space accessibility. (Photo: Avio, Italy)
JAVAD Board Guides ESA Vega Mission
AJAVAD OEM GNSS board is at the heart of the navigation system of the Vega space vehicle developed by the European Space Agency (ESA). ESA developed Vega to launch small satellites into low Earth orbit. It provides great flexibility of mission at an affordable cost and represents the European solution for space accessibility.
The JAVAD OEM GNSS board is embedded in the gle/RGU/G2T/HDA/MB1 for space missions. (Photo: GreenLake Engineering)
The JAVAD OEM GNSS board is embedded in the gle/RGU/G2T/HDA/MB1 — a cost-effective, high-performance, compact and rugged GNSS receiver specifically designed and environmentally qualified. Installed on the upper stage of the VEGA launcher, it allows accurate trajectory verification during the entire flight mission.
ESA’s initial request was for a GNSS unit built with commercial off-the-shelf components, thus maintaining low costs, but which could still operate in the extreme vibration and shock conditions typical of a space launcher. After an initial feasibility analysis, GreenLake Engineering — a subsidiary of Instrumentation Devices — developed the unit mechanically and electronically to satisfy ESA technical specifications. Its biggest challenge was to pass ESA’s extensive qualification and quality process.
For many years, Instrumentation Devices (based in Como, Italy) and JAVAD GNSS have been partners. Instrumentation Devices sub-contracted for the Vega project with Avio (based in Colleferro, near Rome), which is the prime contractor with ESA. Avio is an international group that designs and produces space launchers and both liquid and solid propulsion systems for space transportation.
ESA supervised the project and is responsible for all activities relating to flight safety and qualification of the equipment installed on board. JAVAD GNSS supported GreenLake Engineering with the integration and low-level configuration of the OEM board for this challenging application.
A Massey Ferguson tractor guided by a NovAtel GNSS OEM receiver. (Photo: Hexagon | NovAtel)
GNSS Makers Share Insights
OEMs Discuss Their Boards, Markets and Company Growth
Five prominent GNSS original equipment manufacturers discuss their current products and future markets.
How do you define OEM?
While all six manufacturers agree on the general definition of OEM given above, they focus on different aspects. OEM customers of JAVAD GNSS “require reliable, accurate and stable high precision measurements for positioning and timing,” Hunter said.
The performance of OEM products from Hexagon | NovAtel reflects on its customers and itself, Gerein said. “Our OEM receiver cards are selected, valued and relied upon as the core positioning elements in many applications across vertical markets. We offer full rebranding options with custom logos, colors and industrial designs to seamlessly integrate our technology into their offerings.”
At Trimble, OEM customers “combine Trimble’s GNSS technology with their domain expertise to deliver solutions to the end customer,” Norse said.
For Hemisphere GNSS, OEM clients can range “from a tinker/maker hobbyist working with GNSS, to a large multinational organization designing navigation solutions for global clients,” Burnell said, but the company looks at all of them “in the same light.” Additionally, “Some OEM clients have all the tools they need already built into the Hemisphere products, while others come to us looking for advanced or custom features to help set their products apart in the market.”
Septentrio has a worldwide support team that assists its OEM clients “in all the stages of their integration process, from validation to product release,” Freulon said.
What distinguishes your latest generation of OEM receiver boards from previous ones?
Septentrio’s most recent OEM receiver boards integrate the latest Septentrio GNSS and INS technology and algorithms. AsteRx-m3 OEM receiver boards use all GNSS constellations, can track all available satellites, and can be used as a base station to deliver RTK corrections or as a rover with a single or dual antenna.
Improvements include lower power consumption, increased security with secure boot, and greater resilience with anti-jamming and anti-spoofing. Its new receiver boards, Freulon said, “are backward compatible with extended capabilities of the latest GNSS signals and several variants of the inertial navigation system.” Upcoming software releases will include Galileo’s free High Accuracy Service (HAS) as well as OSNMA, the latest anti-spoofing mechanism.
Trimble’s latest generation of OEM GNSS boards are based on Trimble Maxwell 7 technology, which features the company’s seventh-generation baseband GNSS ASIC (application-specific integrated circuit). Trimble designed the Maxwell family of products to maximize the quality of observables derived from available signals transmitted from all GNSS constellations as well as satellite-based augmentation systems, Norse explained. This results in stronger signals, greater availability, reduced power consumption, advanced multipath mitigation and protection against spoofing.
The boards also run Trimble’s ProPoint positioning engine, which improves performance in challenging environments such as tunnels, urban canyons and tree canopies and provides continuous RTK using a base station or Trimble RTX correction services delivered via cellular or satellite connections.
JAVAD GNSS’ latest OEM products are “more cost effective” and integrate an IMU with an 874-channel multi-GNSS band module with up to 200Hz positioning and data output. “All are still proudly made in the United States,” Hunter said.
NovAtel’s OEM7 receiver boards feature added options for interference robustness and situational awareness “to help protect the user’s GNSS signals from an increasingly crowded RF spectrum and growing jamming and spoofing threats,” Gerein said. The company enhanced the sensor fusion capabilities with SPAN GNSS+INS technology, enabling a deeply coupled integration with IMUs that strengthens positioning through GNSS interruptions and allows the rapid reacquisition of signals post-outages. The boards are compatible with PPP TerraStar Correction Services “for precise positioning anywhere in the world.”
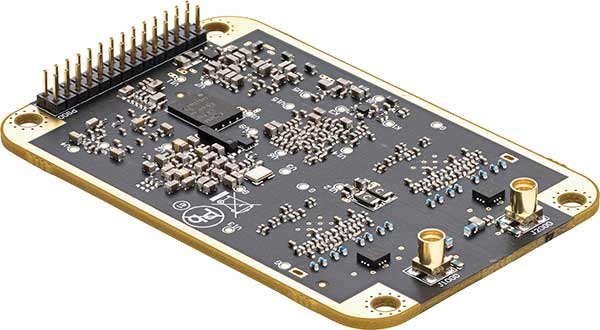
Hemisphere GNSS’ Phantom and Vega series of OEM board products can track all L-band GNSS signals, enabling the company’s OEM clients to upgrade the capabilities of their integrations and “tap into the performance of multi-GNSS, multi-frequency RTK and Atlas PPP solutions,” Burnell said.
The boards consume less power than the previous generation and introduce Hemisphere’s Cygnus automatic interference mitigation technology, which monitors the GNSS signal bands for interference and automatically deploys filters “with no need for integrators or users to understand signal theory,” Burnell explained. Cygnus, which turns off the filters when the interference fades away, is “automatic interference mitigation for the masses.”
What are your markets for your GNSS OEM receiver boards? Which ones are growing the most?
NovAtel said its receiver cards are highly configurable and integrate easily across a wide range of markets, including survey, mobile mapping, agriculture, defense, marine and autonomous platforms for both on- and off-road applications.
In particular, the company’s OEM7 cards “uniquely support the defense market and their requirements for increased protection against jamming and spoofing in mission-critical applications.” The cards also “meet the positioning availability and increasingly rigid product quality standards required in agriculture, automotive and autonomous system markets.”
Trimble lists precision agriculture, construction, mining, forestry, autonomous vehicles, port automation, distribution centers and mobile mapping among the uses of its GNSS OEM receiver boards. “We are seeing growth in markets where reliable, robust and high-precision positioning is required for a solution such as autonomous platforms,” Norse said.
Septentrio reports growing demand for its mosaic GNSS modules “due to their small footprint and impressive performance.” OEM boards, Freulon said, “remain very popular for applications where a quick integration is needed or where ultimate performance is expected.”
However, the most important markets for its OEM boards remain “UAV, together with industrial-grade automations in agriculture, construction or logistics.”
Septentrio sees an increase in “the number of positioning and mapping systems that require the ultimate performance of our receivers, especially when combined with other sensors,” Freulon said. In particular, he cites the performance of its single- and dual-antenna AsteRx-m3 receiver boards and of the AsteRx3i INS boards, which “provide a solution which combines industrial-grade IMU and GNSS all on a single OEM board, greatly simplifying the integration process in systems where both positioning and orientation are needed.”
Hemisphere GNSS, which has a significant OEM presence in the agriculture, marine, survey and GIS markets, reports seeing growth in several markets. “We have seen significant growth in all aspects of autonomous integrations, from ground vehicles for on-road or off-road, to in-flight applications with UAVs, to maritime applications focusing on dynamic positioning in both nearshore and offshore environments,” Burnell said. “There is a recognition that using precision navigation equipment benefits everyone and protects our environment through efficiencies of operation, either in resource management or by improved operational capacity.”
JAVAD GNSS lists maritime positioning and docking, timing, launch vehicle positioning and range safety, autonomous vehicle testing, in orbit positioning and drone guidance among the markets for its OEM receiver boards, with space-related applications the fastest growing market.
OEM7700. (Photo: Hemisphere GNSS)
Briefly describe one of your GNSS OEM receiver boards.
The OEM7700 receiver card from NovAtel is used in agricultural auto-steering applications. “The OEM7700 can receive all GNSS constellations across all frequencies, enabling a highly available position,” Gerein said. “When combined with TerraStar corrections and our SPAN GNSS+INS technology for sensor fusion applications, the OEM7700 ensures highly precise positioning scalable from meter- to centimeter-level accuracy.”
OEM7700 receiver boards help the company’s agriculture customers “solve the positioning challenge of repeatable pass-to-pass accuracy for auto-steering,” Gerein said. Plus, the card meets their strict environmental requirements for agriculture vehicles.
Photo: iXblue
Septentrio’s OEM client iXblue uses the company’s AsteRx OEM boards inside its Atlans A7 positioning and orientation system. “Atlans A7 was developed in close cooperation with Septentrio and is designed to provide continuous and accurate positioning in urban environments,” Freulon said.
Atlans A7 combines iXblue’s inertial navigation system (INS), which is based on a fiber-optic gyroscope (FOG), with Septentrio’s multi-frequency GNSS receiver technologies. To develop this INS-GNSS mobile mapping solution, experts from iXblue and Septentrio worked closely with the aim to develop a smart coupling method that combines the advantages of the two companies’ technologies. The same smart coupling technique is also applied in the post-processing software for an optimal result. The main advantage of Atlans A7 is to maintain a high heading precision in any circumstance, which “allows precise georeferencing for both land and air applications and drastically limits the drift during GNSS outages,” Freulon said.
AX940. (Photo: Trimble)
At Trimble, Norse cites the case of an agribusiness company that wanted to make its robotic tractors able to drive autonomously, requiring centimeter-level positioning and orientation at high update rates in challenging environments. The company chose the Trimble AX940i because of its “combination of GNSS and inertial technology in an easy-to-install smart antenna.” The Trimble ProPoint engine tightly couples the onboard IMU sensor data with the GNSS observations to provide up to 100-Hz outputs utilizing the NMEA-2000 standard or other interfaces. Additionally, Trimble VRS Now service provides instant access to RTK corrections and an operator can use the built-in Wi-Fi to configure and monitor the receiver from nearby.
The HydroBoard II flotation platform contains the RiverSurveyor M9 acoustic device, which measures the flow rates of rivers, streams and irrigation canals. (Image: Hemisphere GNSS)
Hemisphere GNSS’ Phantom 34 RTK receiver and antenna is employed by SonTek in its RiverSurveyor M9 product used by water districts and the U.S. Geological Survey to help monitor and manage water resources. The M9 is one in a series of SonTek products focused on determining flow rates for rivers, streams and irrigation canals. It consists of a small flotation platform with an acoustic doppler current profiler that measures the flow rate of the water column underneath it, a data telemetry system, and the Phantom 34 RTK to pinpoint the data collected.
The platform is floated from shore to shore across a channel using a tether, measuring along the way. “Using RTK simplifies collecting measurements as the survey will have continuous velocity profile measurements the entire way across the waterway,” Burnell said.
Hexagon | NovAtel has updated its GPS Anti-Jam Technology (GAJT) portfolio with the new GAJT-710 product line, which features several enhancements over the previous generation.
The GAJT-710 product line is the next evolution of NovAtel’s battle-proven anti-jam technology for land and marine platforms. The new jammer direction-finding capability of GAJT enables situational awareness and a new silent mode feature reduces its thermal signature. These improvements, including enhanced GNSS tracking performance, are achieved while maintaining the same form and fit of the previous generation product.
GAJT units are deployed worldwide, providing anti-jam protection on land, at sea and in the air. Across these environments, GAJT protects GNSS navigation and precise timing receivers from the growing threats of intentional jamming and unintentional interference. GAJT reliably provides APNT for allied forces no matter the scenario.
“NovAtel has proven itself as a leader for assured PNT through our GAJT portfolio,” said Steve Duncombe, executive vice president of aerospace and defense at Hexagon’s Autonomy & Positioning division. “The new GAJT-710 builds on that success by providing new features combined with existing mission-proven technology to continue providing evolutionary APNT capabilities for the warfighter, national infrastructure and other mission-critical applications.”
NovAtel’s commitment to APNT is central to its product design approach. Deep GNSS expertise and lean manufacturing capabilities enable the delivery of high-performance products like the GAJT-710 in large volumes with minimal production and delivery times, the company said.
The GAJT-710 product line is available for land vehicles, marine vessels, positioning networks and timing infrastructure.
Hexagon | NovAtel has introduced the PIM222A, part of a new family of automotive GNSS positioning products for advanced driver assistance systems (ADAS) and autonomy. The PIM222A harnesses NovAtel’s decades of experience delivering precise positioning in demanding applications for mass deployment in ADAS applications and autonomous vehicles.
Built with automotive-qualified hardware in a package that is easy to integrate, the PIM222A leverages SPAN technology from NovAtel to provide accurate position data in urban environments that challenge GNSS availability. Deeply-coupled GNSS receivers and inertial measurement units (IMUs) ensure continuous availability of position, velocity and attitude, even when satellite signals are briefly blocked.
“I’m excited to introduce the PIM222A, truly the best of both worlds for high-performance GNSS and automotive standards,” said Gordon Heidinger, Segment Manager for Automotive and Safety Critical Systems. “It helps our customers jump-start their development activity for high-precision GNSS, fully supporting performance for all levels of autonomy, ADAS and positioning needs.”
The PIM222A, which was created in collaboration with STMicroelectronics, is a lightweight, power-efficient, solder-down module that maximizes flexibility for integration. The receiver design can be applied to low-, medium- and high-production volumes while retaining a rich array of features, including options such as multi-frequency, multi-constellation, RTK and dual-antenna precision.
The degree of slow-speed and initialization performance is maximized with the dual antenna feature, enabling the best possible positioning performance in all ADAS and autonomous driving situations.
Development kits for the PIM222A are available now for integrators in need of a positioning essentials solution for low- to high-quantity applications.
NATO forces are deployed in some of the world’s most aggressive electronic-warfare (EW) environments. Intentional interference comes both from “personal protection” devices and large, high-powered EW assets.
To navigate despite EW, armed forces need reliable and resilient GNSS/GPS positioning with anti-jam technology. The Light Dragoons — a light cavalry regiment of the British Army — are in a perfect position to test anti-jam technology for assured positioning, navigation and timing (A-PNT).
The Light Dragoons were deployed as the United Kingdom’s Light Cavalry contribution to “Battlegroup Poland,” part of NATO’s enhanced Forward Presence. On the front line, the Light Cavalry engage in reconnaissance, mark targets for indirect fires, and prepare routes for the rest of the force. In this role, being prepared for EW is essential.
To test A-PNT technologies, the Light Cavalry took part in Project Thundercat, a light cavalry capability investigation run by the Armoured Trials and Development Unit (ATDU). A Hexagon | NovAtel GPS anti-jam technology (GAJT) antenna, the GAJT-410ML, was fitted to a Jackal high-mobility transporter and integrated with its onboard positioning system.
GAJT successfully defeats jamming on GPS L1 and L2 and Galileo E1 frequencies. When interference is detected, GAJT recognizes the unwanted interference and reduces reception in that direction. The result is a more resilient GNSS solution, protected measurements and A-PNT.
The Light Dragoons found that GAJT successfully protected their positioning system despite experiencing interference. The GAJT-410ML antenna was easy to install in a simple plug-in-and-go process.
In upcoming experiments, the British Army will use NovAtel technology to gain electronic situational-awareness data to characterize the radio frequency environment.
GAJT systems are offered by NovAtel with customized offerings for land, marine and air applications.
The Light Dragoons test NovAtel GAJT anti-jamming antennas in Project Thundercat. (Photo: Photo: British Army)
Hexagon | NovAtel is offering a new marine-certified GNSS receiver specially designed for nearshore applications. The MarinePak7 multi-constellation, multi-frequency receiver has been specifically engineered to receive Oceanix Correction Service from NovAtel, providing horizontal accuracy up to three centimeters (95%) in a marine environment.
With SPAN GNSS+INS technology capabilities, the MarinePak7 deeply couples GNSS and inertial measurement units (IMUs) for a 3D understanding of your position.
Delivering exceptional positioning, heading, attitude, velocity and heave measurements, the MarinePak7 is optimized to succeed in the demanding marine environment for nearshore applications.
An intuitive user interface reduces training and setup time, making it an ideal solution for use in demanding marine applications, including dredging, hydrographic survey, marine construction and nearshore renewable energy operations.
“The MarinePak7 is NovAtel’s first receiver designed specifically for a marine environment. It provides accurate and reliable positioning for nearshore marine operations using our GNSS technology and Oceanix Correction Service,” explained Hexagon | NovAtel marine segment portfolio manager David Russell. “This receiver was developed by a team of experienced marine engineers and incorporated feedback from existing NovAtel users to deliver a high-quality, all-in-one positioning solution for the nearshore marine market.”
Several optional features are available with the MarinePak7, including GNSS heading, interference mitigation and a UHF radio used to receive RTK corrections.
As in January 2020, we are starting the year by providing insights from manufacturers of GNSS receivers. We asked these industry leaders to look back at the past two years and forward at the next two, and discuss key innovations in the following areas:
utilizing Galileo and BeiDou
dealing with jamming and spoofing
integration with inertial measurement units (IMUs) and other sensors
positioning using cell phones and other consumer devices
any other areas or challenges they find particularly significant
Photo: Emma Hardy/Eos Positioning Systems
The single most important trend that emerges from manufacturers’ responses is the improvement in receiver performance due to the increase in the number of satellites (now 150) and signals (now more than 100). With four usable constellations, GNSS is now a reality. Multi-constellation receivers are quickly becoming the norm, even in consumer devices, and new user segments are benefiting from satellite-based PNT. Already, some smartphones and tablets are achieving decimeter-level or even centimeter-level accuracy. Over the next two years, new GNSS services will become available and, as the GNSS constellations continue to develop, the availability, reliability and repeatability of their signals will improve further.
A second important trend is the growth in satellite-delivered correction data, which substantially lowers the entry barrier for high accuracy applications by obviating the need for costly local infrastructure. This is starting to change the traditional cost-benefit calculation regarding real-time kinematic (RTK) vs. precise point positioning (PPP) corrections (see also our Editorial Advisory Board PNT Q&A).
A third and continuing trend is the increasing threat from intentional and unintentional jamming and interference across the globe, paralleling the increasing ubiquity of GNSS and potentially impacting most users. Therefore, receiver manufacturers continue to improve hardware and software techniques to defeat, or at least mitigate, this threat, greatly assisted by the increase in the number of available signals.
Finally, as automakers and high technology companies continue their efforts to develop autonomous vehicles (aka “self-driving cars”), the concept of GNSS integrity is getting renewed attention. Here, too, the increase in the number of available signals is extremely helpful.
With François Martin, Vice General Manager, International Division
Utilizing Galileo and BeiDou
The addition of Galileo and BeiDou to GPS and GLONASS not only extends GNSS positioning to more obstructed environments, but also allows the use of new survey methods, such as the hybrid IMU-GNSS pole-tilt compensated surveying and stakeout with survey-grade accuracy. Further expansion of GNSS navigation systems will result in even greater availability, reliability and repeatability.
Dealing with jamming and spoofing
As an integrator and developer of GNSS systems, we focus our design on strong electromagnetic shielding and sealed isolation chambers. From a technology standpoint, the combination of advanced GNSS signal processing, optimized antenna design, and advanced filtering ensures minimal interference.
Photo: CHC Navigation
Integration with IMUs and other sensors
The integration of interference-free, high-dynamic IMU fused with GNSS technology brings an obvious benefit to surveying and autonomous navigation applications. The latest algorithm developments make it possible to get rid of tedious initialization processes, increase the productivity of typical survey tasks, bring extra safety to operators, and compensate for transient GNSS outages.
Positioning with consumer devices
Multi-constellation GNSS chips are accelerating the development of untapped user segments, but the repeatability of position accuracy remains an issue. The integration of high-performance GNSS chips and helical antennas as high-precision add-on modules on smartphones and tablets enables centimeter- or decimeter-level accuracy. This democratization of technology is increasing earlier adoption of GNSS technologies by a broader user base.
Eos Positioning Systems
With Jean-Yves Lauture, Chief Technology Officer
Utilizing Galileo and BeiDou
The past two years have seen considerable maturation of the Galileo and BeiDou constellations. Considering the now four usable GNSS constellations and the aggressive launches of Galileo and BeiDou, the number of available satellites and the list of frequencies they use have considerably increased. Accuracy itself is slightly improving with the availability of BeiDou phase 3 signals, whereas performance and productivity experience a significant boost under tougher conditions with more satellites and stronger signal availability. It is not uncommon for our customers to use 30 to 35 satellites out of 40+ in view using an Arrow Series GNSS receiver. We are waiting for the availability of the High Accuracy Service (HAS) (PPP) on the Galileo E6 frequency, hopefully in a couple of years.
Photo: Eos Positioning Systems
Integration with IMUs and other sensors
Eos has put a lot of effort recently in supporting external sensors and accessories to facilitate mapping of certain types of assets or mapping in certain types of conditions. For instance, this past year Eos released our underground mapping solution called Eos Locate for ArcGIS (see cover photo), which integrates with external utility locate devices to allow a user to precisely map buried assets. Eos Laser for ArcGIS interfaces with laser rangefinders to map assets in GNSS-impaired environments.
Positioning using consumer devices
With our bring-your-own-device (BYOD) approach on the market to support high-accuracy data collection for GIS, we have made it possible to override the consumer devices’ locations with accuracies down to the centimeter from our Arrow receivers. Customers can use any of their cell phones or tablets and immediately start mapping with submeter or centimeter accuracy.
Hemisphere GNSS
With Kirk Burnell, Senior Product Manager
Utilizing Galileo and BeiDou
The Galileo and BeiDou phase 3 systems introduce modern signal structures that allow more accurate measurements to be made than GPS first introduced. The new signals and increased satellite count are significantly improving receiver performance. Our Phantom and Vega product lines harness these new signals.
Dealing with jamming and spoofing
The increasing number of incidents of intentional and unintentional jamming and interference across the globe has impacted nearly every type of GNSS user. Our Cygnus interference mitigation technology automatically detects and mitigates the interference in real time, as well as providing spectrum analysis of the GNSS signal bands.
Photo: Hemisphere GNSS
Integration with IMUs and other sensors
Today’s autonomous-focused environment increases the need to share data across platforms. Both Vector and Vega provide robust GNSS heading, position and velocity to marine, machine control, UAV and internet of things (IoT) integrators, helping augment their sensor data.
Positioning with consumer devices
Positioning in consumer products will continue to drive innovation, while chasing accuracy and precision requires a strong understanding of geodesy fundamentals. As design requirements push well beyond the limits of what consumer GNSS delivers, and with the help of our knowledgeable staff, our precision receivers are delivering reliable performance in some very impressive applications.
Other significant challenges and opportunities
New GNSS signals and new surrounding technologies continue to come online, and the RF environment continues to see increased activities. Our underlying Lyra II ASIC technology and Cygnus enable our Phantom and Vega integrators and users to reliably coexist with these changes.
Hexagon | Novatel
With Sandy Kennedy, Vice President Innovation, Hexagon’s Autonomy & Positioning division
Utilizing Galileo and BeiDou
GNSS is now reality, not just inclusive phrasing to replace GPS. We are well into the era of multi-constellation receivers, and users will notice distinct improvements in solution availability with the addition of Galileo and BeiDou measurements. Over the next two years, we expect users in a variety of applications to start exploiting our globally available, fast-converging RTK From the Sky technology, which is enabled by the addition of quad-frequency signals supplied by Galileo and BeiDou (see page 29).
Dealing with jamming and spoofing
The RF spectrum is crowded and will only become more crowded over time. In 2020, we introduced our GNSS Resilience and Integrity Technology (GRIT), a suite of firmware options for the OEM7 receiver family. In addition to interference detection and mitigation, GRIT adds spoofing detection and time-tagged digitized samples for advanced situational awareness of the RF spectrum. With GRIT’s spoofing detection, opponents can try to spoof us. But fool us? Not a chance.
Photo: Hexagon | NovAtel
Integration with IMUs and other sensors
IMUs have become more accessible to more applications due to size, weight, power and cost reductions. At the same time, our algorithmic capability has significantly advanced to use lower quality inertial measurements for greater benefit. Originally reserved for truth systems, high-end mapping, and aerospace and defense applications, GNSS+INS solutions are now available in products like our SMART7 line of smart antennas for precision agriculture applications. Closer integration of the inertial and GNSS processing will bring further benefits in hostile RF or just plain difficult positioning environments. There is no perfect single sensor, but you can get more accurate by combining a set of sensors that offset each other’s vulnerabilities and limitations.
Positioning with consumer devices
The general population is accustomed to looking at their smartphone to see not only their location, but also the size of the “blue dot” of positioning uncertainty that accompanies it. We have always said accuracy is addictive, and we will no doubt start to see consumer demands for smaller blue dots with increasingly accurate positions. Making the digital reality match our real world demands continuously available and reliable positioning. Being lost is a terrifying feeling, especially for those who have been staring at their phone for the past 30 minutes and have no recollection of the physical world through which they have passed.
Other challenges and opportunities
The transition to autonomous vehicles, for both on-road consumer and off-road industrial applications, is inevitable. It is becoming increasingly necessary to prioritize the development of functional safety and integrity requirements to achieve the safe operations of autonomous systems. These requirements are necessary and entirely non-trivial to develop.
Photo: Stephen Drake
Javad GNSS
With the Javad GNSS Team
Utilizing Galileo and BeiDou
Simultaneous RTK and PPK processing of all available GPS, GLONASS, Galileo and BeiDou signals in receivers powered by our 874-channel TRIUMPH chip has resulted in significant productivity gains. User Darren Clemons told us “These Plus units are at least 40%–50% faster… The combination of the four super engines and the RTPK is unbeatable. You can get an accurate shot just about anywhere.”
Dealing with jamming and spoofing
Usually, more than 100 signals are available at any given time, and we need only a small number to compute a position. By tracking and verifying all these constellations and their signals, it is extremely unlikely that we can be spoofed without our knowledge. Javad GNSS receivers will immediately recognize spoofing and take corrective actions. Spoofing protection is available on all Javad GNSS receivers and OEM boards.
Integration with IMUs and other sensors
The Javad GNSS engineering team relentlessly works to identify and integrate the latest sensor technologies that can boost productivity. Our TRIUMPH-LS’s integrated camera sensor has for years supported onboard photogrammetry, and now our TRIUMPH-3 receiver’s integrated IMU provides high-precision tilt compensation.
Other challenges and opportunities
Our innovative RTPK feature is improving GNSS surveying and monitoring. Our Triumph-LS and Triumph-3 RTK rover systems combine the strengths of RTK and PPK into a system that can post-process RTK data and verify its results in parallel and real time. Users get the best of both worlds. If RTK fails, RTPK comes to the rescue in a fraction of a second.
Septentrio
With Gustavo Lopez (pictured) and Stef van der Loo, Market Access Managers
Utilizing Galileo and BeiDou [GL]
With 150 GNSS satellites in space, multi-constellation has been a natural transition for improved GNSS availability. We see this in rover applications and in upgraded reference networks modernizing correction services. The next two years will be transcendent as constellations finally start delivering new services. We see our products soon integrating
GAL-OSNMA for anti-spoofing and then moving to new high-accuracy services.
Dealing with jamming and spoofing [GL]
We have witnessed a large increase in jamming and spoofing events as GNSS ubiquity increases. Users are becoming conscious of this, yet many integrations are still using vulnerable receivers, and we see manufacturers falsely claiming to have proper resilience. Septentrio’s AIM+ technology uniquely mitigates all these risks, and users come to us for expert advice on this area. In the coming years, we expect further receiver innovations and developments in adjacent technologies.
In 2020, Septentrio opened an R&D center in Espoo, Finland. (Photo: izhairguns/iStock/Getty Images Plus/Getty Images)
Integration with IMUs and other sensors [SVL]
Integration of sensors and sensor fusion moved from the research stage to the major production and adoption phase as an element in autonomous systems. Using a GNSS/INS (see our AsteRx-i products) is crucial for various applications — for example, being able to work in difficult environments — and for vehicle orientation. The development of lower cost IMUs while keeping high performance will enable a shift in focus from hardware to software. This will result in multi-sensor technology that is better scalable, easier to use, and more stable to integrate in relation to a full system with various sensors.
Positioning with consumer devices [GL]
We see further integration of dual-frequency GNSS chipsets in mobile technology for increased accuracy, which is key for future consumer applications. Septentrio has also witnessed the important involvement of telecom operators in GNSS correction services. Septentrio products (such as the PolaRx5 or AsteRx-SB) are deployed on new generation networks as operators prepare for the new generation of positioning in cell technology.
Other significant challenges and opportunities [GL]
Two areas are emerging thanks to the autonomy era and due to further regulations in the market. The first is the concept of GNSS integrity, which has a strong link to the reliability of autonomous solutions. The second is security, which, beyond anti-spoofing, is linked to the cybersecurity of GNSS systems as the demand increases for the protection of electronics and software.
Trimble
With Stuart Riley, Vice President of GNSS Technology
Utilizing Galileo and BeiDou
Most Trimble precision receivers can utilize any combination of GNSS satellite constellations (GPS, GLONASS, Galileo, BeiDou and QZSS) to deliver centimeter accuracy and optimize performance, even in degraded conditions. Users can select the constellations they want the receiver to use.
Dealing with jamming and spoofing
Spoofing is rare and low risk in locations in which Trimble’s precision GNSS agriculture, construction and geospatial customers operate. However, to protect users, modern Trimble Maxwell-based GNSS receivers implement hardware- and software-based techniques to detect and mitigate spoofing. Jamming sometimes impacts customers, but is not their primary challenge. The same issues are still present today as they were in the early days of precision GNSS. The main productivity concerns remain related to multipath and problems around obstructions and trees. Trimble continues to improve our GNSS systems’ robustness with advances in processing algorithms and hardware enhancements such as integrating inertial technology.
Trimble SiteVision uses Catalyst and augmented reality to preview a new housing development in an open field. (Photo: Trimble)
Integration with IMUs and other sensors
The Trimble R12i and SPS986 represent Trimble’s third-generation receivers (preceded by the R10 and the R12) capable of integrating inertial measurements into 3D GNSS positioning. In addition to speed and convenience for the user, integration with IMU provides immunity to magnetic interference and real-time integrity monitoring.
With the introduction of the Trimble R12 with the ProPoint GNSS positioning engine, we significantly improved the performance in challenging environments. This was further enhanced with the addition of an IMU for tilt compensation in the R12i. The new solution provides a system that delivers more accurate results in more places and in less time.
Positioning with consumer devices
The Trimble SiteVision augmented reality solution and Trimble Catalyst GNSS receiver operate on Android devices. Trimble Catalyst technology provides a software-defined GNSS receiver capable of survey-grade accuracy. Catalyst is the ideal solution for third-party applications that benefit from precise real-time positioning. Trimble SiteVision combines Catalyst positioning with augmented reality to deliver real-time, on-site visualization of proposed structures and existing underground assets.
Other significant challenges and opportunities
An ongoing challenge in GNSS positioning is the ability to obtain positions with suitable accuracy when and where they are needed. Solutions such as RTK and VRS provide solid performance at local and regional levels. Today, these technologies are complemented by subscription-based Trimble RTX positioning services, a global approach that uses a network of GNSS tracking stations and satellite-delivered correction data to achieve required accuracies. In 2020, coverage for Trimble CenterPoint RTX Fast, which enables users to achieve two-centimeter or better accuracy with initialization time of less than one minute, was expanded to cover the continental United States as well as much of Canada and Western Europe. The CenterPoint RTX Fast network now covers more than 5 million square miles worldwide. Trimble RTX coverage enables global users such as farmers, land surveyors and GIS professionals using RTX-capable receivers, to untether from the cost and complexities of GNSS base stations. In addition, the service offers a single, continuous corrections network ideal for enabling a broad range of safety-critical autonomous applications in markets such as automotive, agriculture and construction.
An applications engineer and his sky-jumping bud don wingsuits to test a NovAtel GNSS receiver integrated with an Epson IMU.
In September 2019, a specialized team assembled at an airstrip outside of Edmonton, Alberta, Canada. Their mission: Put the Hexagon | NovAtel PwrPak7D-E2 enclosed receiver through tricky test procedures that involved jumping out of an airplane at 10,000 feet.
Taking the NovAtel SPAN receiver to the skies was the brainchild of Andrew Levson, who is both a NovAtel engineer and a skydiving aficionado. He proposed using a wingsuit to test the receiver’s positioning accuracy.
The first wingsuit dive took place in 2011, with NovAtel’s OEM615 receiver and ALIGN heading technology.
This time, the engineers aimed to test both NovAtel’s GNSS receiver featuring SPAN tightly coupled GNSS+INS functionality and its new companion, the Epson G370 inertial measurement unit (IMU). Both are packed in the PwrPak7D-E2 to provide uninterrupted positioning even in GNSS-denied environments.
Wingsuit jumpers Andrew Levson (right) and Blair Egan suit up for the NovAtel tests. (Photo: NovAtel)
“We chose to revive the project, given that equipment has evolved with more comprehensive capabilities,” said Patrick Casiano, manager of Product Management and Applied Technology, NovAtel. “Between 2011 and 2019, we could significantly reduce the payload while increasing value in the data.” In 2011, NovAtel was only able to monitor Levson’s heading. In 2019, the team captured heading, azimuth, pitch and roll measurements.
“We wanted to prove that our equipment can work in a high-dynamic environment, which isn’t necessarily ideal conditions for collecting positioning data,” explained Kiera Fulton, associate product manager, Enclosures and Post-Processing Software, NovAtel. “By proving our products work in a less-than-ideal environment, we exemplify how robust our solutions are.”
Photo: NovAtel
Test Preparation
For the 2019 test, the team chose to gather attitude data. The team also asked Levson to perform specific skydiving maneuvers to rigorously test the positioning solution. “Rather than performing just a simple flight to the ground, we wanted to challenge the solution to reveal more,” Casiano said.
The test was not easy to implement. A lot of behind-the-scenes planning and preparation went into the project. Plus, unforeseen factors made the test more challenging, Fulton said, such as logistics and weather.
“The skydivers require specific weather conditions in order to jump safely,” Fulton said. “Considering how quickly the weather can change here in Alberta, the time windows in which the skydivers could safely jump were few and far between. We pulled through regardless of these adversities.”
When the day of the jump came, the skydivers jumped five times — as many jumps as the weather would permit. “Theoretically, one jump is enough,” Casiano explained. “But as engineers, we always want to have more data to work with.”
2011 wingsuit jump setup. (Image: NovAtel)Wingsuit Jumps Compared: Because of the PwrPak7D-E2’s small size yet strong processing power, Levson required fewer devices in 2019 than in 2011, when he was equipped with two receivers, two antennas, a laptop and a battery. The amount of positioning data also increased. (Image: NovAtel)
High-Flying Maneuvers
The skydivers executed four maneuvers during their jumps.
DART: This simple jump established a baseline for more complex maneuvers to follow. (Photo: NovAtel)
Dart. The skydivers first performed a straight jump, which the team called the Dart. The data from this jump provided a baseline for analyzing the positioning and attitude data.
“This was more important for the attitude analysis, as we have never collected inertial data in a skydiving jump before,” Fulton said.
S-Turn: One of three completed maneuvers. (Image: NovAtel)
S-Turn. Next came the S-Turn. In this maneuver, Levson weaved from side-to-side to test how the equipment handles agile movements.
For the S-Turn, the engineers anticipated seeing the biggest changes in roll. “We were pleasantly surprised to see that the S-Turn is detectable in the azimuth data as well, indicating high correlation between roll and azimuth in a skydiver’s movements,” Fulton said.
The maneuver revealed that when Levson rolls, his body is using less surface area for wind resistance. As a result, he was falling to the ground faster, which then meant the dataset is shorter.
“This became another challenge during data processing, as the free-fall portion of the datasets were now becoming less than 3 minutes in duration,” Fulton said.
Data from the S-Turn also revealed the effect of crosswinds, which is detectable in the data.
Reverse Immelmann: How the intricate maneuver works. (Image: NovAtel)
Reverse Immelmann. The third maneuver was the Reverse Immelmann. Levson flipped onto his back, began a downward turn until perpendicular to the ground, then leveled off, traveling in the opposite direction from where he began.
This complicated exercise provided data for all aspects of an attitude solution — roll, pitch and azimuth. By comparing the expected and real data, the team found several places where the maneuver wasn’t performed perfectly.
“There are many challenges once in the air that would have caused Levson to deviate from the trends in the data that we expected,” explained Fulton. “This is where we realized that our solution was working much more to evaluate the skydiver, rather than using the wingsuit to evaluate our product.”
Casiano agreed. “As a whole, the PwrPak7D-E2 was telling a story about Andrew’s flight,” he said.
The team also wanted to have the skydivers try a Cobra — a maneuver from aerobatics where an airplane momentarily lifts it nose and stalls — but time constraints prohibited it.
“If we had gotten this [a Cobra] recorded, it would have been detectable in the pitch and horizontal velocity data,” Fulton said. “Who knows what other findings we would have come across in this data!”
Measurement matrix: The asterisks (*) denote data values that can only be measured with an IMU. (Chart: NovAtel)
Applications
All these tests, of course, are designed to apply to real-world applications where the PwrPak7D-E2’s capabilities are used in dynamic environments.
For instance, an unmanned aerial vehicle (UAV) needs a feedback mechanism that tells the user whether it is moving or hovering. “In the wingsuit project, we proved that crosswind can be detected,” said Casiano. “This is an important finding for UAV applications, since a feedback loop from the PwrPak7 and the SPAN system can help rectify movement from external forces with counter propulsion to stay still. The PwrPak7D-E2 enclosures allow a data rate of up to 200 Hz, meaning you can capture motion with more detail.”
The PwrPak7D-E2 also works well for any black-box application where users want to record with the push of a button.
Inside the PwrPak7D-E2
Photo: NovAtel
The PwrPak7D-E2 is an all-in-one product. Its components are designed to work together seamlessly to provide positioning data, housed in NovAtel’s OEM7 firmware.
GNSS receiver card used to capture positioning data
Dual-antenna capability to provide accurate heading
Epson IMU to record attitude and motion
On-board logging to eliminate the need for constant monitoring on a PC
Post-Processing
Preparation enabled the team to process the data on site. The on-board logging feature on the PwrPak7D-E2 eliminated the need for constant monitoring during data collection. The unit is pre-configured so that at the time of the jump, Levson only needed to push a button for the unit to start collecting data.
Once the pair of skydivers landed, the ground team offloaded the data for processing, similar to using a memory stick, and moved it to a laptop computer.
“We pulled raw measurement data from the receiver and processed those measurements into position and attitude information,” Fulton said.
It took about 30 minutes to determine whether the dataset was viable. Later processing back in the office generated the charts such as those below.
Expectation: For both the S-Turn and Reverse Immelman maneuvers, a simulated plot was generated at the office to better understand the inertial data produced from the actual wingsuit jumps. (Chart: NovAtel)Reality: This chart shows the actual data. (Chart: NovAatel)
Dynamic Environments
Photo: NovAtel
The PwrPak7 series can be used in many environments in the automotive, agriculture, marine, defense and UAV fields.
“We are constantly trying to find ways to apply this product to other applications and industries,” Fulton said. “With more testing, we keep finding that the PwrPak7 can be used to solve more challenges.
“We want to push the boundaries of our products. True innovation comes from challenging yourself and hovering outside your comfort zone,” Fulton said. “For this project, we are more than satisfied with the results we found. In order to further challenge ourselves and this product, we look forward to applying the PwrPak7 in more scenarios.”
“The PwrPak7 is a robust unit that sets us up for more exploration,” Casiano said. “We are always looking for more challenges to put this unit through to see how the PwrPak7 can further help solve our customer’s problems.
But will there be more skydiving for NovAtel in Levson’s future?
“We could always revisit the skydiving project in another nine years,” Casiano said. “But who knows how the technology will evolve by then?”
Post flight: Blair Egan (right) and Andrew Levson back on Earth. (Photo: NovAtel)
What it feels like to take the plunge
For those of us who have never jumped out of a plane, engineer and skydiver Andrew Levson provides insight.
“It’s not as scary as people think. Because the plane is moving fast, it’s mostly just windy and loud. You don’t get that roller coaster type feeling; in fact you don’t feel like you are even falling — freefall feels more like floating than falling. You definitely wouldn’t know you are flying at speeds over 100 mph.
“When you are climbing out of a plane, there is nothing else on your mind aside from the jump you are about to do. It is pure freedom, and there is often no stress, just a sense of peace and an intense focus on your plan for the jump. Once you get out of the aircraft, you get to fly your body in the way that you want to — most people only know of the position of falling with your body arched and belly toward the ground, but there are many different ways you can orient your body. Some of the lesser known ways to fly your body include your arms and legs spread out while flying a wingsuit (with your belly or back toward the earth) or flying with your head pointing straight at the ground.
“When you skydive, you get to explore the sky with your friends, which is an amazing and unique experience. During a skydive, it is common to experience an ultra-focus during the jump — time slows down a bit and you can see and feel things that are seemingly beyond your typical capability.Many people are amazed at how much skydivers are able to do in the short period of time that a single skydive lasts — about a minute for regular skydives and about two or three minutes when flying a wingsuit.”