From a weather perspective, Aberdeen, Scotland, may not be the most inviting location in the world in which to live. Nevertheless, Aberdeen is the leading European oil & gas business hub and is one of eight “super cities” spearheading the UK’s economy. But it’s waaaaay up north of the border with England on the east coast of Scotland — winter conditions can be difficult, even inhospitable at times. But if you want to transmit differential corrections out to shipping and oil rigs in the North Sea, it’s an ideal location.
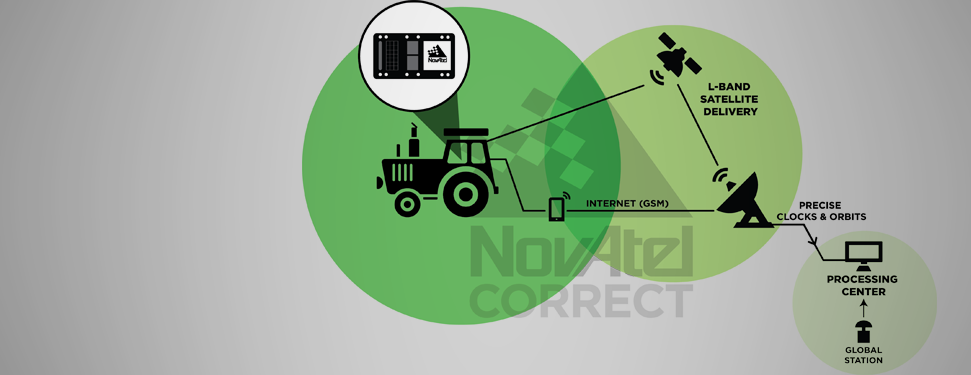
Since its first beginnings in Aberdeen, Veripos has evolved to become a major worldwide business for marine, and now also for “precise land navigation, positioning and guidance solutions.” Veripos is now delivering augmentation services on a global basis, employs more than 130 specialist personnel based in 11 sites around the world, and in 2013 had revenues of more than $45 million. With a global ground network of more than 80 dual-redundant receiver base stations, Veripos now provides not only traditional differential GNSS transmissions, but also precise GPS and GLONASS orbit and clock corrections over seven Inmarsat GEOs and also via the Internet — we now call Precise Point Positioning (PPP).
Veripos ground receiver station network.
Veripos began in March 1989 as a joint venture between Brown & Root Survey and Ormston Technology, a specialist marine electronics company based in Hull, England. Initially, Veripos provided a conventional Differential Global Positioning Service (DGPS) for users in the North Sea based on HF radio transmitters.
Introducing a much broader satellite-based DGPS service in 1994, coverage was extended to cover the Gulf of Mexico followed by further expansion of the network/coverage into Brazil, West Africa, Mediterranean and Caspian Sea. Veripos became a wholly-owned subsidiary of Subsea 7 in the same period. Following a major expansion in late 2004, full global service coverage was achieved in 2005, and ultimately Veripos became the second largest precise satellite positioning services supplier in the world to the marine industry, with leading clients in exploration, seismic, construction, survey, offshore supply vessels (OSV) and offshore drilling. In late October 2012, Veripos diversified further, launching its TerraStar business to address the land and near-shore sector.
Achieving global accuracies of 5-10 centimeters using relatively small amounts of data, users worldwide are mostly able to accommodate the initial convergence time needed to achieve these higher accuracies. Veripos claims that using multiple constellations, convergence time can be down to less than 10 minutes — even lower for hot starts.
The “free” IGS data that competes with Veripos and other subscription correction providers is also pretty good, but it’s not generally used by commercial operations.
IGS Multi-GNSS Experiment Tracking Network.
IGS data is provided by academic and government sources around the world, and the advantage is not only free access, but also open data and multiple open-source software tools and data, all built to published open standards. But the IGS system is not a 24/7 reliable data source, and support can be a problem. It’s not designed for companies who must have service guarantees in order for them to consistently operate profitably in difficult conditions — it’s more experimental, for research and testing for the academic and government outfits that produce the data, along with a whole bunch of engineering teams who take advantage of free data and can cope with system hiccups for their R&D and for comparison purposes.
So Veripos and other commercial providers overcome the weaknesses of IGS by providing a worldwide network that is well maintained — an infrastructure designed for high reliability and availability. Each base station has dual-redundant receiver and communications links. There are three processing centers, two active and one on warm standby, that can each operate the whole system, and each of the processing centers has dual-redundant equipment. There are seven geostationary satellites with a large degree of coverage overlap, and Internet data feeds also provide a backup. More than these system design features, Veripos works directly with its customers to ensure successful integration of their corrections with customer operations and, above all, supports the customer directly during these operations. If the customer is not operational, Veripos recognizes that down time means lost profits for its customers, so its staff work hard to avoid any service interruptions.
It’s not clear what would happen to this currently stable marketplace if and when Galileo begins selling a commercial service on E6, but the existing commercial service providers are pretty sure that competition in their segment from a government provider that is publicly funded is not in their best interests. At the recent Munich Satellite Navigation Summit, Gian-Gherardo Calini from the European GNSS Agency certainly received a clear message from Trimble, NovAtel, Veripos and Fugro (to a lesser extent) that these companies do not believe that Galileo should be entering their market. However, Calini did state several times that the GNSS agency did not want to disrupt this market. How to do that when the Galileo infrastructure, control systems and satellites are wholly government funded remains unclear. Even if the service were wholesaled to a commercial provider, it’s unlikely that the retailer would have to bear the full cost of maintenance and support of the entire Galileo ground and space infrastructure, so their service would in effect be hugely subsidized.
Veripos recognized that focusing on its marine service alone is ignoring the land segment. So the company established a new business called TerraStar to address the land segment, just as Fugro had spun off OminSTAR for the land segment many years ago. TerraStar is still a division of Veripos, and the PPP infrastructure and distribution system it uses is the same. TerraStar is focused entirely on land and close-to-shore operations, so its business development and marketing is aimed at wholesaling its services through OEMs for these segments, while Veripos continues in parallel solely with marine and offshore.
Initial OEMs to sign up were Septentrio and Altus, which is a subsidiary of Septentrio that focuses on survey products and applications. Septentrio had a number of successes with DEME dredging and land reclamation in Belgium and terrascan airborne geophysical survey in South Africa and Germany.
Terrascan airborne geophysical survey.DEME land reclamation.
And here we arrive at the place where these companies all start to come together. In mid-March this year, Hexagon acquired Veripos, along with TerraStar. Hexagon is, of course, the parent that has NovAtel and Leica in its thoroughbred stable of GNSS industry leaders. Could this acquisition have something to do with John Deere/NavCom operating its own StarFire PPP system, or Trimble acquiring OmniSTAR from Fugro and now providing its own range of PPP correction services?
Well, NovAtel rolled out NovAtel Correct and new software at the end of March for its OEM6 high-precision receivers, which includes TerraStar’s precise point positioning (PPP) corrections. And NovAtel now has a closely associated company within the Hexagon stable, so a long-term association between NovAtel and Veripos/TerraStar is just about assured. And, with a big company group like Hexagon and many potential connections between group members with common interests, the prospect for continued investment as revenues increase means Veripos should be even better positioned going forward.
And, of course, adding NovAtel customers, including other potential OEM third parties, to the Veripos/TerraStar user base all helps both companies’ revenue and keeps their parent Hexagon happy too. So actually, it’s all about increasing the bottom line!
The opening plenary session of the Munich Satellite Navigation Summit is convening as this column goes to the electronic press for distribution. Coverage of these top-level system briefings before a select international GNSS audience in Munich will appear in two e-newsletters next week, The European GNSS and Earth Observation Report (EAGER), and in a shortened form via the Navigate! Weekly.
Until then, here’s an update on the CNAV debate in the United States and wider system-operator background from two recent meetings.
CNAV So Far. In the closing hours of 2013, a departing U.S. Cabinet under-secretary for Transportation dropped a verbal bomb on the Pentagon, in the form of a communiqué expressing concern about reliability of the new civil navigation message (CNAV) signal scheduled to emanate in April from select GPS satellites on orbit. Subsequent explosions were detected in halls from Washington to Colorado and Los Angeles.
Meanwhile, one semi-public organization communicated to its members that it finds nothing disturbing about the plan, set to take effect sometime in the coming month.
IGS Steps Forth on CNAV. The International GNSS Service, a voluntary federation of more than 200 worldwide agencies that pool resources and permanent GPS and GLONASS station data to generate precise GPS and GLONASS products, issued a statement to its members and participating institutions in March. “We are confident that the IGS network is not at risk due to this change, and it is a welcomed step towards GPS modernization.”
The communiqué from the Infrastructure Committee went on to say that “This event is considered innocuous to the stability of the receiver network since during a limited GPS CNAV test campaign in June 2013 the IGS network was not affected, only a very specific receiver problem was detected by the IGS Multi-GNSS Experiment, which was informed to the GPS ground segment and addressed.
“Most modern receivers can track L2C and L5 and the CNAV messages, but the decoded messages should not be used by the receivers. The traditional L1 NAV messages (LNAV) will continue to be transmitted as usual and thus the receiver navigation files, birds, etc., will continue unaffected. Older receivers will be completely unaffected as they do not track L2C or L5.
“In any case IGS Station Operators and Station Network Managers are advised to keep an eye on receivers and on their data outputs during the start of the CNAV activation. Just in case something strange is observed please stop data submission and notify the IGS (Network Coordinator, Infrastructure Committee) so that we may investigate the issues quickly. In case of doubt with your own equipment please contact the receiver manufacturer and inform the IGS.”
PNT Advisory Board Airing. Prior to the appearance of the CNAV letter from the departing deputy secretary, the U.S. PNT Advisory Board heard a report in early December from Air Force Space Command on said implementation plan for the GPS CNAV message on L2C and L5. The minutes of that meeting were recently released.
The minutes relay the gist of General Whelan’s CNAV remarks as: “CNAV has been under discussion for a considerable time. Currently, L2C and L5 signals are being transmitted, but without a navigation message. AFSPC is working hard to activate these messages as soon as possible. One of the reasons for the delay is that additional time was needed to complete testing prior to activation. Testing began in late summer 2013 and, based on initial test results, a way ahead has been plotted. . . . Current plans are to begin initial broadcasting in the spring of 2014. CNAV uploads will occur twice weekly. The signal will meet GPS Standard Positioning System (SPS) standards, but may not achieve current accuracy levels until full implementation in late 2014.
“CNAV live-sky testing occurred in June [2013] and was conducted in cooperation with civil, industry, and international partners. The two-week test series included independent assessment and verification. The tests identified four errors that required action. The first, which was addressed in real time, related to implementation of the test series. The second required improvement to the tools suite, which should be totally integrated into the ground segment by December 2014. The third and fourth errors required patches to satellite software. All four issues are now regarded as closed.”
A subsequent presentation to the PNT Advisory Board from a Department of Transportation spokesperson did not directly mention CNAV, according to the meeting minutes, but did include this reminder on civil signal monitoring:
“DOT is responsible for performance monitoring of GPS civil signals. The International Committee on GNSS’s (ICG’s) transparency principle states that ‘Every GNSS provider should publish documentation that describes the signal and system information, the policies of provision, and the minimum levels of performance offered for its open service.’ Currently, this is only done on GPS L1 C/A signals. Performance standards for L2C and L5 have not yet been established. The crucial function of signal/service monitoring is to verify that commitments to GNSS performance are being met. Additionally, monitoring improves the situational awareness for GNSS operators, and provides assurance that any civil service failure is detected and resolved promptly.”
Other Global Developments. The International Committee on GNSS (ICG) held a meeting of its Working Group A on Compatibility and Interoperability, in November 2013 in Dubai, United Arab Emirates. A brief summary of those proceedings is now available.
The notes evidence steady, deliberate organizational and international progress on collaboration between system providers of GNSS signals.
Among new presentations to the body came several from Russia. Viktor Kashenko, Russian Federation, presented on the “Prospects for Status and Development of GLONASS System Space Complex,” an update on the GLONASS space segment noting that there is a full constellation of GLONASS-M satellites. CDMA signals at L1 and L2 are expected to be available beginning around 2016 or 2017.
Grigory Stupak, Russian Federation, followed with a presentation titled “SDCM Present Status and Future GLONASS Signals Development.” There are currently 22 SDCM ground stations around the world with a goal of creating seamless coverage throughout Russia with LPV-200 capability. The U.S. asked a question about whether SDCM provides corrections for other constellations in addition to GLONASS. The Russian Federation explained that SDCM currently augments both GLONASS and GPS, but additional constellations could be added in the future.
Oleg Denissenko, Russian Federation, discussed the goals of the GNSS Monitoring and Assessment System being developed in Russia and identified a list of parameters to be monitored by the international systems.
Xurong Dong from China gave the status of the International GNSS Monitoring & Assessment Service for OS (iGMAS). Initial operational capability (IOC) is expected in June 2014. Ten tracking stations have been installed so far, and 25 additional stations are expected to be added in the future. A signal quality monitoring station has also been established in China and a new 40-meter antenna is expected to be installed in 2014.
Jeffrey Auerbach from the U.S. State Department presented on outcomes of the second Interference Detection and Mitigation (IDM) April 2013 workshop. The European Union noted that they are conducting a survey of professional users in Europe about privacy concerns, and perceptions and understandings of interference and jamming.
Stanislav Kizima, Russian Federation, provided an overview of the International IDM system concept and recommended the creation of an IDM system database server to be used for monitoring GNSS facilities. He suggested identifying formalized data exchange formats for IDM. A question was asked about whether something like this already exists in Russia. Kizima responded that Russia does have an active system for monitoring interference, but not specifically for GNSS. There are some issues with the existing system because GNSS is not listed as source of interference and the technical facilities are not able to analyze parameters specific to GNSS. Hence the need for development of specific GNSS monitoring facilities. Tom Stansell from the U.S. responded that cell phones could be enabled to become individual detectors of GNSS interference, and the interference source location could be determined this way. This technique is known as crowdsourcing. Kizima noted that cell phones give information on signal power, but not measurement equipment.
China continued the session on spectrum protection with a presentation by Weimin Zhen on a proposal to develop a template for GNSS interference detection and reporting. He suggested that a generic template specific to reporting GNSS interference be developed.
Upcoming principal WG-A related meetings:
WG-A Inter-session Meeting, Geneva, Switzerland, possible dates July 16-18, 2014)
The International GNSS Service (IGS), a worldwide federation of agencies involved in high-precision Global Navigation Satellite System applications, has announced the launch of its Real-Time Service (RTS). The RTS is a global-scale GNSS orbit and clock correction service that enables real‐time precise point positioning (PPP) and related applications requiring access to IGS low latency products.
The RTS is offered in beta as a GPS-only service for the development and testing of applications. The Russian GLONASS is initially provided as an experimental product and will be included within the service before the end of 2013 as the RTS reaches its full operating capability. Other GNSS constellations will be added as they become available.
The RTS is operated as a public service. Users are offered free access through subscription. Interested parties are invited to visit the service’s website.
The IGS is a worldwide federation of more than 200 organizations that operate a cooperative global infrastructure to provide the highest-quality GNSS data products for scientific users. The IGS is a service of the International Association of Geodesy (IAG), one of the associations of the International Union of Geodesy and Geophysics (IUGG). It is also a service of the World Data System of the International Council for Science (ICSU/WDS).
By Mark Caissy, Loukis Agrotis, Georg Weber, Manuel Hernandez-Pajares, and Urs Hugentobler
The International GNSS Service has embarked on a project to provide a high-accuracy GPS satellite orbit and clock data service in real time. The service will also provide 1-Hz data streams of GPS and GLONASS data from a network of global continuously operating reference stations. The IGS real-time data and orbit and clock products will be of immense benefit for geoscience studies and a host of other science and engineering applications. A team of authors associated with this project discusses the genesis and status of the real-time service and the plans to provide an initial operating capability.
INNOVATION INSIGHTS by Richard Langley
GPS HAS ALWAYS BEEN A REAL-TIME POSITIONING SYSTEM. From the outset, GPS was designed to provide virtually instantaneous position, velocity, and time, anywhere in the world, 24 hours per day. Its real-time positioning capability is achieved, in part, by measuring pseudoranges on multiple satellites simultaneously and by using the satellite orbit and clock data transmitted by the satellites themselves. The one-sigma accuracy of the horizontal component of the real-time positions obtained from measurements on the L1 frequency only, in a low multipath environment, can be as good as a meter. The accuracy is limited by the resolution and noise of the pseudorange measurements and the accuracy of the transmitted satellite orbit and clock data and the L1 ionospheric delay model.
Much higher position accuracies are routinely achieved by using dual-frequency carrier-phase observations and precise satellite orbit and clock data computed from measurements provided by global tracking networks. Ionosphere corrections are also available for single-frequency users. The International GNSS Service (IGS) has been at the forefront of providing such data since its inception in 1994. The IGS now consists of over 200 actively contributing organizations in more than 80 countries and a global network of over 370 active stations. In addition to providing high-accuracy GPS satellite orbit and clock data, the IGS provides similar GLONASS products as well as GPS and GLONASS raw measurements and related information.
Traditionally, the IGS data and products have been delivered with some delay with the intention that they be primarily used for so-called post-processing of user-collected data. For example, the “Final” GPS satellite orbit and clock products, the ones with highest accuracy, are delivered with a latency of 12–18 days. And while half of the “ultra-rapid” product is available for real-time use, the data is predicted based on earlier observations and has considerably less accuracy than the other IGS products. Recently, the IGS embarked on a project to provide a high-accuracy GPS satellite orbit and clock data service in real time. The service will initially also provide 1-Hz data streams of GPS and GLONASS data from a network of global continuously operating reference stations. Data and products from the Galileo and Compass systems will be added later. The IGS real-time data and orbit and clock products will be of immense benefit for geoscience studies and a host of other science and engineering applications.
In this month’s column, a team of authors associated with this project discusses the genesis and status of the real-time service and the plans to imminently provide an initial operating capability.
“Innovation” features discussions about advances in GPS technology, its applications, and the fundamentals of GPS positioning. The column is coordinated by Richard Langley, Department of Geodesy and Geomatics Engineering, University of New Brunswick.
For more than a decade, the International GNSS Service (IGS) has been developing real-time infrastructure and processes and is now in the final stages of preparation for the launch of the IGS Real-Time Service (IGS-RTS) in the second half of 2012. The exact launch date will be decided at an IGS workshop in July. The service will begin with a status of initial operating capability (IOC) and will provide access to continuous streams of one-hertz GNSS data from a global network of stations in real time. It will also give access to globally valid wide-area GPS orbit and clock corrections, which will be capable of supporting sub-decimeter real-time precise point positioning (RTPPP).
The availability of data and products from this new service will follow the IGS’s open data policy that these products will be openly available to all. Owing to the nature of this international collaboration, the IGS-RTS will be offered without a service guarantee. Data and products will be generated on a “best effort” basis; however, the service will have considerable redundancy built in and is likely to achieve the same degree of reliability for which other IGS services are known. When launched, the new service will contribute to the IGS goal of integrating new systems, technologies, and applications into IGS products and services so as to meet the changing needs of its user community.
The IGS is an operational scientific service of the International Association of Geodesy and one of several services contributing to the Global Geodetic Observing System (GGOS). Data and products generated by the RTS will contribute to the natural hazards theme within GGOS. The RTS will support applications that detect, in real time, motions that are precursors to natural hazards such as landslides, volcanic activity, and tsunamis. To assist in fulfilling their own mandates, national geodetic and space agencies have contributed to the development of the real-time service and will continue to be involved both as contributors and users of the IGS real-time products. Other applications for the service will include GNSS constellation performance monitoring, weather forecasting, and space weather monitoring. For further background on the impact that real-time geodesy is having on the scientific community and applications, refer to the Eos article listed in the Further Reading sidebar. The online version of this article provides additional information in answer to the question “Why is the IGS involved in real-time GNSS?” (see also Further Reading).
In this article, we discuss the following topics:
The open standards that have been adopted by the IGS for the delivery of real-time GNSS data, orbit, and clock corrections;
The IGS real-time infrastructure that is in place to ensure a reliable service;
The generation, organization, and performance of the real-time clock and orbit products;
A global real-time vertical total electron content (RT-VTEC) product under development;
User access and tools;
Future plans.
Historical Look at Real Time
The development of the RTS has followed the traditional stages of development for a new IGS service. First, a working group is formed and tasked with meeting certain goals. Second, a pilot project is initiated and, if successful, is followed by the third and final stage, which is the launch of the new service.
The IGS Real-Time Working Group (RTWG) was established in 2001 with the goal of designing and implementing real-time infrastructure and processes for the delivery of real-time data to analysis centers, and the dissemination of real-time products to users. The working group’s direction was set at the IGS workshop, “Towards Real Time” held in Ottawa in the spring of 2002. At that time, the design for a prototype real-time service was adopted.
In June 2007, the IGS announced the Call for Participation in the IGS Real-time Pilot Project with a three-year target to accomplish its goals. In 2009, the pilot project was extended to March 2011, and in August 2011 the working group declared that the pilot project had reached the additional goal of IOC and that it would be recommending to the IGS governing board the launch of an official real-time service.
Open Standards Adopted
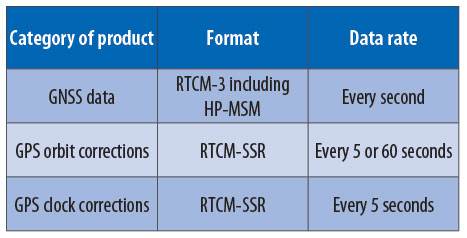
An important objective of the IGS is to develop and maintain standards and formats for GNSS data and products. To achieve this objective for real-time GNSS, the IGS joined the Radio Technical Commission for Maritime Services Special Committee 104 (RTCM-SC104) in 2008. After joining RTCM, the IGS real-time project adopted the RTCM-3 format for GPS and GLONASS observation messages and the RTCM-State Space Representation (RTCM-SSR) format for orbit and clock correction messages.
The Receiver Independent Exchange (RINEX) archival format became the shared responsibility of both the IGS and RTCM-SC104 in spring 2011. Because of this new development, there is now a project underway to develop binary messages that will enable the creation of a complete RINEX file from RTCM-SC104 binary messages. Part of this project involves the development of a new message format for GNSS data called RTCM-Multiple Signal Messages (RTCM-MSM). To enable interoperability among different GNSS receiver types, all phase observations in RTCM-MSM messages are aligned to the frequency band’s reference signal. An amendment to support the QZSS and Compass constellations is planned as the next step in the evolution of this format.
IGS-RTS GNSS orbit and clock corrections are distributed using RTCM-SSR messages. These messages were designed to enable RTPPP and were officially adopted as an RTCM standard in May 2011. The format supports both GPS and GLONASS constellations. The combined resolution of the RTCM-SSR corrections supports millimeter-accuracy corrections and positioning at the same level. Enhancements to support Galileo, QZSS, and Compass constellations, and a global ionosphere correction format are planned.
Delivery via NTRIP
The IGS-RTS uses the Network Transport of RTCM by Internet Protocol (NTRIP) for internal operations and for the delivery of real-time products to its user community. NTRIP became an RTCM standard in 2004 and since that time has developed into a series of components that collectively provide a robust and proven system for the collection and distribution of GNSS information in real time. Being an RTCM standard, NTRIP is the ideal protocol for delivering and receiving HP-MSM and SSR messages. More information on NTRIP can be found in Further Reading.
Infrastructure Design
Owing to the collaborative and best-effort nature of the contributions that collectively comprise each of its services, the IGS cannot make any commitments or guarantees for the accuracy or availability of the RTS. However, the IGS understands that its user community expects the service to be reliable, both in terms of accuracy and availability.
To meet accuracy expectations, the IGS will strive to remain on the cutting edge of global real-time positioning and associated technologies as they evolve. To meet its user community’s expectations for availability of the service, the IGS will work to ensure there is a reliable flow of GNSS data and products from the source through the production chain, in real time without interruption. To accomplish this, redundancy has been provided for the paths across which data and products will flow, thus reducing the likelihood of total failure in the network.
Figure 1 illustrates the distribution of real-time tracking stations in the network. The network is currently made up of approximately 130 globally distributed stations maintained by a wide variety of local and regional operators. These stations deliver one-hertz data to the real-time data centers with typical latencies of 3 seconds or less.
Global coverage is essential for the success of the service, and the presence of redundant stations in geographical regions enhances the reliability of data available from these regions. This goal has been a challenge in some areas of the globe — for example, the south Pacific.
IGS station operators are required to adhere to a minimum set of standards and are encouraged to adopt best practices for real-time operations.
Examples of best practices are:
Real-time data should be transmitted to a minimum of two separate real-time data centers;
Stations that contribute to the realization of the IGS reference frame should be operated in real time to guarantee a reliable alignment of the real-time products to a stable reference frame.
Real-time analysis centers (RTACs) are also encouraged to adopt the best practice of building the ability to ingest data from two or more global data centers into their processing strategy.
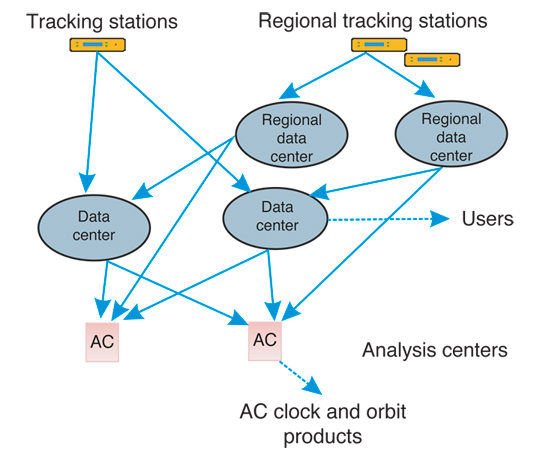
Figure 2 illustrates the single tracking station and a regional network architecture. This arrangement specifies that data streams from the tracking stations should be sent to two separate real-time data centers where they become available to users. In this architecture, analysis centers can source reference station data from more than one data center. This design reduces the likelihood of single points of failure, making the data network more robust.
Figure 2. GNSS station to data center architecture.
Once the GNSS data are successfully delivered to the analysis centers, they are processed, the generated products are sent to combination centers, and the final product streams are distributed to users.
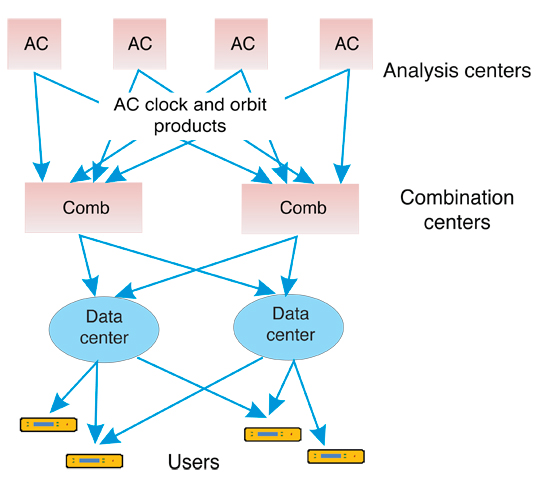
Figure 3 illustrates the analysis-center to combination-center to user-network architecture. As with the classical orbit and clock products, the reliability of real-time products will be assured through the creation of a combined product that is based on submissions from a minimum of three RTACs. Analysis centers are encouraged to adopt the best practice of sending generated product streams to two independent combination centers. To ensure the availability of products, users will have redundant data centers from which to choose real-time products.
Figure 3. IGS GNSS product distribution architecture.
RTAC Design and Results
As part of the Real-Time Pilot Project (RTPP), 11 RTACs generate real-time orbit and clock correction products: the Federal Agency for Cartography and Geodesy (BKG); the Centre National d’Etudes Spatiales (CNES); the Czech Technical University (CTU); the German Aerospace Center (DLR); the European Space Operations Centre (ESOC); GEO++; the German Research Centre for Geosciences (GFZ); Natural Resources Canada (NRCan); GMV; the Vienna University of Technology (TUW); and Wuhan University (WUH).
The design of the RTS specifies that GNSS orbit and clock corrections are to be delivered every 5 seconds. Typically RTACs wait 5 seconds for station data to be collected. Allowing 5 seconds for data processing and correction distribution yields a delay of 10 seconds once the RTAC products reach the combination center.
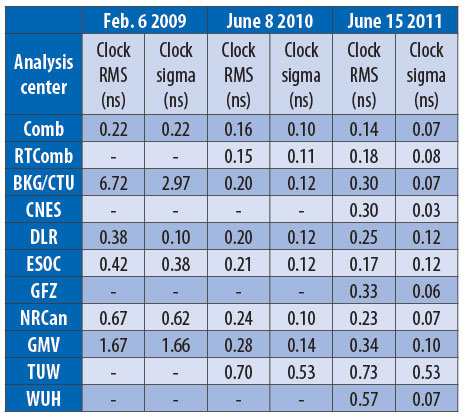
The role of the real-time analysis center coordinator (RTACC), currently performed by ESOC, is to coordinate the activities of the RTACs and to generate and assess the quality of the combined real-time clock product. Table 1 shows snapshots of the performance of RTAC and combined products in the RTPP since 2009. The quality of the individual RTACs and the combined products is assessed through the root-mean-square (RMS) and standard deviation (sigma) of the difference between the individual products and the IGS rapid clock product. It is interesting to note the increase in participation as well as the improvement in the results over time. The target for the pilot project was to produce a combined clock product accurate to within 0.3 nanoseconds when compared to IGS rapid products. This was achieved early on in the project. The June 15, 2011, results shown are consistent with today’s results.
Table 1. Real-time pilot project clock product comparisons.
RTAC Coordinator Methods, Results
The RTACs generate their orbit and clock estimates every 5 seconds and transmit them to the combination centers where they are processed using combination software. The latency of the combination process is 5 seconds, which, when added to the delay of products arriving from the individual RTACs, yields a total combination delay of approximately 15 seconds.
The RTACC combination method detects and removes outliers that may be present in individual solutions. The combination is generated by first aligning all the solutions to a reference solution by removing a common solution-specific offset from all the satellite clocks. After alignment, clock differences between pairs of solutions are processed for outlier detection and for generation of a combination product. Satellite orbits are combined using solution averages after outlier detection.
Satellite orbit corrections are estimated for two reference points, the satellite center of mass (CoM) and the satellite antenna phase center (APC). The orbit and clock correction products for both CoM and APC are encoded into RTCM-SSR streams. These streams are then transmitted to two or more data centers, where they become available to users or to other data centers. Additional information that will assist the user in selecting between CoM or APC streams will be available once the service is launched. Currently, only satellite orbit corrections referenced to APC are supported by the RTCM-SSR standard. To avoid confusion, the CoM streams will have restricted access when the IOC service is launched. The IGS will be tabling amendments to the RTCM standard in order to allow both reference points to be transmitted without restrictions.
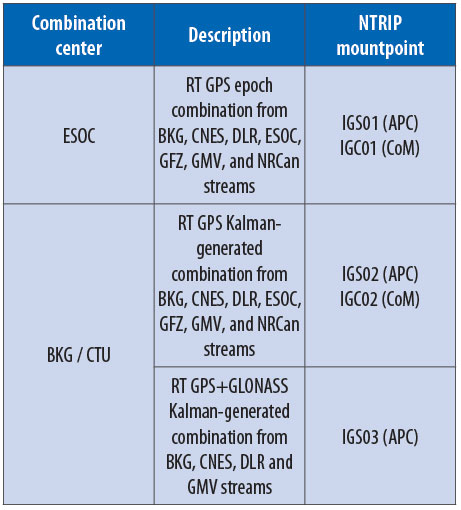
Table 2 shows combined product streams operating within the RTPP. Both a single-epoch combination product developed by ESOC and a Kalman-filter combined product developed collaboratively by BKG and CTU are available. A GPS-plus-GLONASS Kalman-filter combined product has also been developed at BKG and CTU.
Table 2. Real-time IGS combination streams operating within the real-time pilot project.
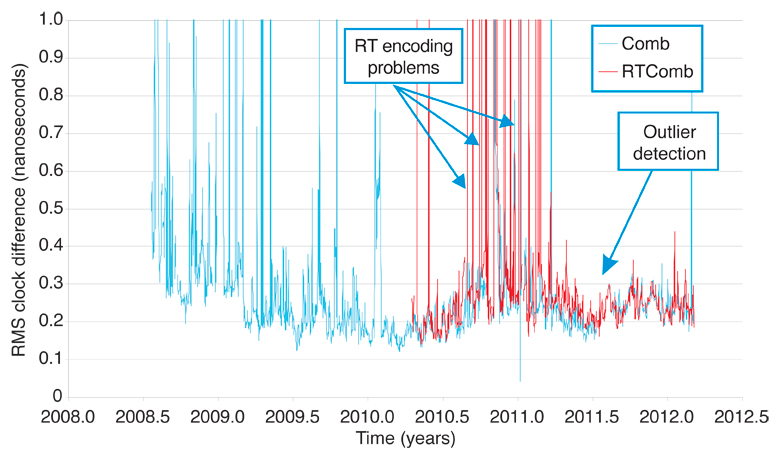
Figure 4 shows the history of the clock RMS performance of the single-epoch combination solution against the IGS “rapids.” This was the first combination product generated by the RTPP, and it started as a batch combination from daily orbit and clock file submissions by the RTACs. From early in 2010, ESOC started providing the first real-time combination product, generated directly by processing the real-time correction streams. The batch combination is in blue, while the real-time combination, starting in 2010, is in red. After an initial improvement phase, the results are stable except for occasional outliers. The outliers are due to problems in the individual solutions, and these should be removed by a properly executed combination methodology. Outliers in the combination towards the end of 2010 and beginning of 2011 were caused by RTCM encoding errors in some RTAC streams. Improvements to the outlier detection algorithm were introduced in early 2011, and it can be seen that the incidence of results with high RMS have been drastically reduced. Most outliers are now caused by poor orbit results after satellite maneuvers. Figure 5 illustrates the effectiveness of the outlier-detection algorithm.
Figure 4. Combination solution clock performance. (Click to enlarge.)Figure 5. Combination solution performance with improved outlier detection.
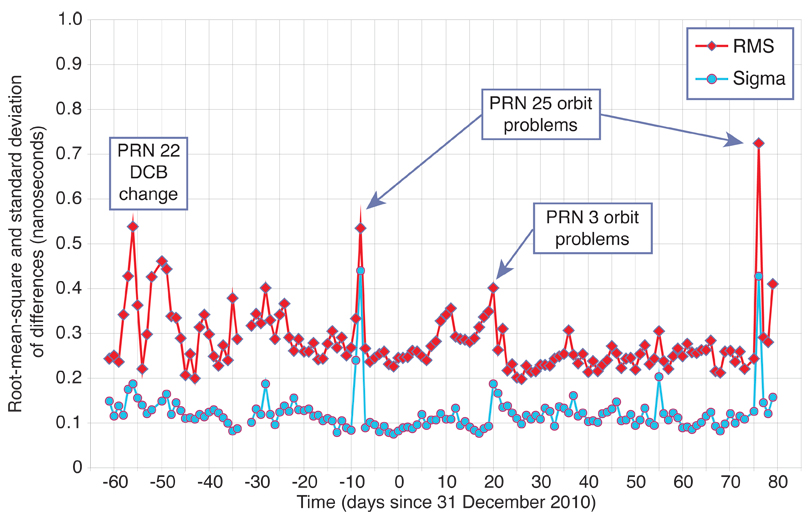
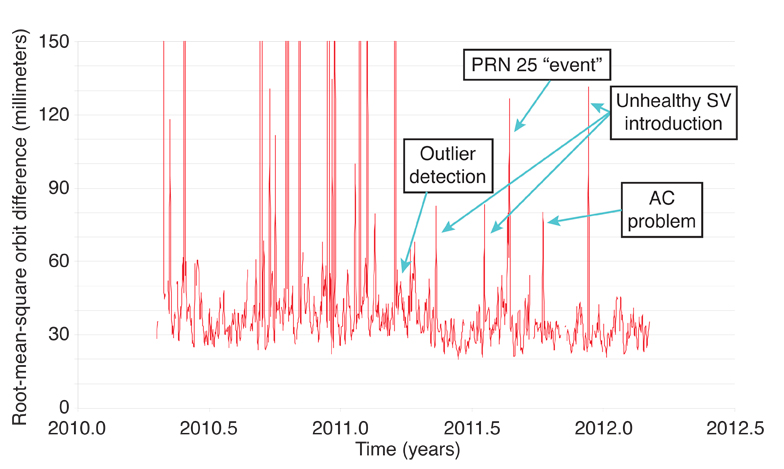
The RTAC orbit solutions use the predicted portion of an orbit arc. Most RTACs use the IGS Ultra Rapid Orbit product, but some use their own batch solutions, refreshed every one to two hours. The orbit results of the combined orbit product exhibit patterns similar to the clock results, with a significant improvement after outlier detection was introduced. The main problems are highlighted in Figure 6. There were some instances of what appear to be unannounced thrusting events on GPS satellite PRN 25. At times, problems arose from the re-introduction of previously unhealthy satellites. Other sources of error are occasional problems in one of the AC solutions, which are not entirely removed by the outlier detection algorithm.
Figure 6. Combination solution orbit performance.
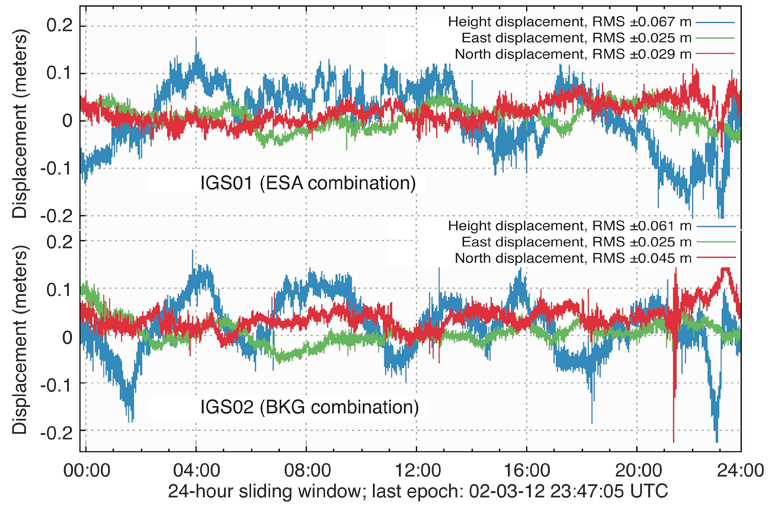
The performance of the real-time combination products is monitored mainly through daily comparisons against the IGS rapid products as per the examples shown in Table 1. The products are also monitored through continuous kinematic precise point positioning (PPP) on the BKG NTRIP website. Sample combination stream PPP results are shown in Figure 7, where it can be seen that the horizontal error component is for the most part less than 10 centimeters and the vertical component is approximately a factor of two higher.
Figure 7. Combination solution PPP performance of station FFMJ (Frankfurt, Germany) over 24 hours.
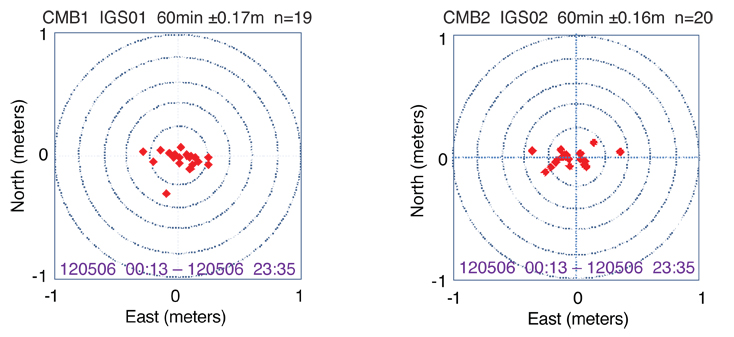
Figure 8 illustrates the results of daily PPP convergence test conducted on the two GPS-only combination products. These are performed at 23 globally distributed sites during successive hours of the day. The results illustrated are the horizontal RMS errors for the last 10 minutes of each test, after an allowed convergence time of 50 minutes.
Within the IGS, associate analysis centers (ACC) produce specialized or derived products. Two examples of real-time ACCs are the Universitat Politècnica de Catalunya (UPC) and DLR. They have participated in the IGS RTPP and continue to collaborate on the development of a combined global IGS RT-VTEC product. This collaboration is occurring under the umbrella of the IGS Ionosphere Working Group led by the University of Warmia and Mazury in Olsztyn, Poland, the host for this summer’s IGS workshop.
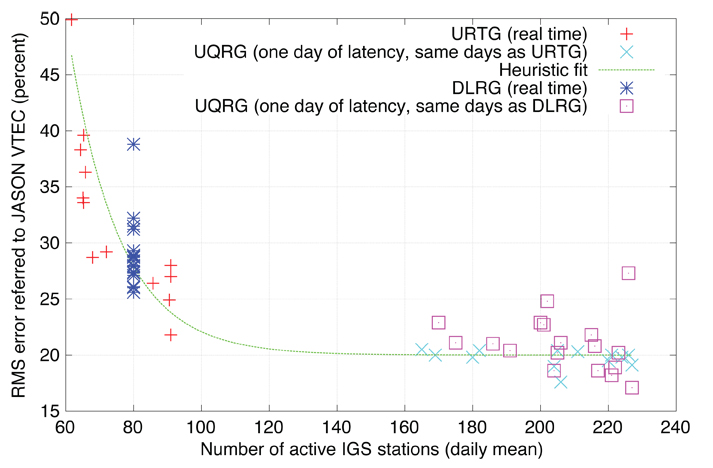
Figure 9 illustrates a comparison between preliminary global RT-VTEC products from UPC and DLR. This plot shows the RMS difference between each center’s product and Jason satellite altimeter VTEC measurements, taken over the ocean, versus the daily average number of active real-time GNSS receivers selected from the global real-time tracking network. A constant number of 80 stations was chosen for the DLR comparisons. As a control for the comparisons, UPC’s rapid product (UQRG) was also used. The Jason comparisons are considered pessimistic for the overall global VTEC product accuracy because the land-based tracking stations are generally located quite far from the location of the Jason measurements. The importance of a reliable globally distributed and sufficiently dense real-time GNSS tracking network is evident. These results suggest that it may be feasible to combine real-time VTEC products from several centers into a robust IGS real-time ionosphere product.
Work to compare both solutions is underway with the goal of finding optimal ways to assess and combine these products into an IGS RT-VTEC product. Future efforts will include working with RTCM to ensure that the IGS RT-VTEC product is compatible with ionosphere-correction information proposed for the RTCM-SSR standard.
Figure 9. Comparisons between IGS real-time VTEC values and those from the Jason satellite altimeter.
Products, User Access, and Tools
Table 3 presents a list of products by category that will be offered by the service when it is launched. The list of products within each category will be finalized following the workshop in July. Once the final list of products is decided on, a user’s guide will be developed that will provide a detailed description of the products, their use, and where they can be accessed.
Table 3. Initial products of the IGS Real-Time Service.
It was mentioned earlier that the IGS-RTS uses the NTRIP protocol for the delivery of products to users. Users must use an NTRIP client application, either standalone or embedded in the user equipment, to establish a communication link with the data center that hosts the products of interest. Fortunately, open source software is available for this purpose: The BKG NTRIP Client (BNC) and the RTKLIB software (developed by T. Takasu) may be used. Both are open source applications and both support a variety of GNSS positioning applications. Links to these software packages are provided in Further Reading.
Future Direction
The real-time tracking network will continue to grow, and new receivers that can track all available GNSS constellation signals will be added. The IGS Multi-GNSS Experiment (M-GEX) will help improve the tracking network and associated data collection, quality control, and analysis procedures. Currently, several RTACs produce GLONASS orbits and clock corrections. Most RTACs are working to support the GLONASS and Galileo constellations, with QZSS and Compass on the horizon. The RTACC will continue to improve the combination process and reduce correction latency. The availability of real-time data streams and corrections from several constellations will challenge the IGS and GNSS community to develop new and innovative applications that take advantage of all available GNSS observations and receiver hardware.
Conclusion
The IGS is now in the final stages of preparation for the launch of its Real-Time Service. As with other IGS services, the RTS will be offered without a service guarantee. From the initial formation of the RTWG in 2001, through the pilot project stage, to today’s state of readiness, the development of the service has benefited from collaboration among many member organizations, most notably the real-time analysis centers.
Given its use of international standards, a built-in level of redundancy, and combined-products design, the IGS Real-Time Service will support robust high quality sub-decimeter real-time positioning on a global scale.
Acknowledgments
The authors wish to acknowledge the important contributions of the more than 30 agencies that participated in the IGS real-time pilot project. Most notably, the station operators and real-time analysis centers that we rely on to deliver, day in and day out, high quality data and products, and without whom the service would not be successful. The authors also wish to acknowledge the work of GEO++ in leading the development of the RTCM-SSR correction format.
Why Is IGS Involved in Real-Time GNSS?
Since its inception in 1994, the IGS has produced high-quality GNSS data products from a cooperative global infrastructure. The IGS products enable access to the definitive global reference frame for scientific, educational, and commercial applications that greatly benefit the public, and they are freely available to users.
To date, access to this highly accurate reference frame has been ex post facto or predicted, limiting the utility of the IGS products. For years, IGS users have expressed a desire for real-time products to enhance existing applications, or to enable new applications that require low or no latency. This desire is now being satisfied by the IGS.
Real-time GNSS has been an element of IGS strategy for more than 10 years in the context of providing innovative support for scientific applications and performance monitoring of GNSS. In 2002, the IGS conducted a cutting-edge workshop titled “Towards Real-Time,” which laid out a framework for developing a real-time service, from network configuration and management to algorithm development and product generation to definition of real-time protocols and standards.
During this time, the IGS has faced many challenges. As technology has progressed to enable real-time GNSS applications, so has the perception that the IGS could become competitive with commercial entities, or even with IGS participants themselves. However, commercial services are generally not practical for users within sponsored research organizations, universities, national geodetic and mapping agencies, or non-governmental organizations because of costs imposed by for-profit business models, or a lack of technical transparency due to the proprietary nature of the services.
The IGS response to these challenges is driven by a strong rationale to support public benefit applications. Principal beneficiaries include conventional weather and space weather forecasting, geophysical hazard detection and warning systems, and GNSS performance monitoring. Of key importance are real-time geophysical applications where openly available, global, real-time GNSS information is complementary to other information, such as seismic data, for rapidly detecting, locating, and characterizing hazardous events such as earthquakes and tsunamis.
Quoting a 2011 article in the American Geophysical Union’s publication Eos, “…. Global Navigation Satellite System (GNSS) … provides an essential complement to other geophysical networks because of its high precision, sensitivity to the longest-period bands, ease of deployment, and ability to measure displacement and atmospheric properties over local to global scales. Recent and ongoing technical advances, combined with decreasing equipment and data acquisition costs, portend rapid increases in accessibility of data from expanding global geodetic networks. Scientists and the public are beginning to have access to these high-rate, continuous data streams and event-specific information within seconds to minutes rather than days to months. These data provide the opportunity to observe Earth system processes with greater accuracy and detail, as they occur.”
The IGS real-time products will include data streams from a global network of high-quality GNSS receivers, real-time combined orbits, accurate satellite clock solutions, and real-time ionosphere information. These products will enable real-time precise point positioning (PPP) at global scales for scientific and hazard detection applications. They will also have potential application for quality assessment of multi-constellation satellite performance and monitoring inter-system biases between the different GNSS.
Mark Caissy is a team leader and senior geodetic engineer in the Geodetic Systems and Infrastructure Section of the Geodetic Survey Division, Natural Resources Canada. He chairs the International GNSS Service (IGS) Real-Time Working Group (RTWG) and the Real-Time Pilot Project (RTPP) Committee. His main interests are in the area of real-time precise point positioning for natural hazards monitoring.
Loukis Agrotis, with his company Symban, is a contractor for the European Space Agency’s European Space Operations Centre working on the development of real-time GNSS infrastructure. He is the analysis center coordinator for the RTPP and represents the IGS at European meetings of the Radio Technical Commission for Maritime Services (RTCM). He holds a Ph.D., with dissertation title “Satellite Orbits and the Global Positioning System,” from the University of Nottingham, United Kingdom.
Georg Weber is a scientific director in the Department of Geodesy at the German Federal Agency for Cartography and Geodesy (BKG), where he is responsible for the German National Reference System. As the major developer of Network Transport of RTCM by Internet Protocol, he also chairs the Internet Protocol Working Group in RTCM and is also a member of the IGS RTWG. He received his master’s degree and his Ph.D. in geodesy from the University of Hannover, Germany.
Manuel Hernandez-Pajares is a full professor at the Universitat Politècnica de Catalunya in Barcelona, Spain. He served as chair of the IGS Ionosphere Working Group during the period 2002–2007. He is currently working on new algorithms for precise ionospheric sounding and satellite navigation using GPS and Galileo data.
Urs Hugentobler is a full professor of satellite geodesy at Technische Universität München, Munich, Germany, and the current chair of the IGS governing board. His main experience is in precise GNSS positioning applications and satellite orbit modeling.
“The International GNSS Service in a Changing Landscape of Global Navigation Satellite Systems” by J.M. Dow, R.E. Neilan, and C. Rizos in Journal of Geodesy special issue, “The International GNSS Service (IGS) in a Changing Landscape of Global Navigation Satellite Systems,” Vol. 83, Nos. 3-4, 2009, pp. 191–198, doi: 10.1007/s00190-008-0300-3.
“Real-time Combination of GNSS Orbit and Clock Correction Streams Using a Kalman Filter Approach” by L. Mervart and G. Weber in Proceedings of ION GNSS 2011, the 24th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, Oregon, September 19–23, 2011, pp. 707–711.
• Networked Transport of RTCM via Internet Protocol (NTRIP)
“Real-time Clock and Orbit Corrections for Improved Point Positioning via NTRIP” by G. Weber, L. Mervart, Z. Lukes, C. Rocken, and J. Dousa in Proceedings of ION GNSS 2007, the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation, Fort Worth, Texas, September 25–28, 2007, pp. 1992–1998.
“Networked Transport of RTCM via Internet Protocol (Ntrip) … IP-Streaming for Real-Time GNSS Applications” by G. Weber, D. Dettmering, H. Gebhard, and R. Kalafus in Proceedings of ION GNSS 2005, the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation, Long Beach, California, September 13–16, 2005, pp. 2243–2247.
“The CNES Real-time PPP with Undifferenced Integer Ambiguity Resolution Demonstrator” by D. Laurichesse in Proceedings of ION GNSS 2011, the 24th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, Oregon, September 19–23, 2011, pp. 654–662.
“A New Global TEC Model for Estimating Transionospheric Radio Wave Propagation Errors” by N. Jakowski, M.M. Hoque, and C. Mayer in Journal of Geodesy, Vol. 85, No. 12, 2011, pp. 965–974, doi: 10.1007/s00190-011-0455-1.
“The Ionosphere: Effects, GPS Modeling and the Benefits for Space Geodetic Techniques” by M. Hernández-Pajares, J.M. Juan, J. Sanz, A. Aragón-Àngel, A. Garcia-Rigo, D. Salazar, and M. Escudero in Journal of Geodesy, Vol. 85, No. 12, 2011, pp. 887–907, 2011, doi: 10.1007/s00190-011-0508-5.
“The IGS VTEC Maps: A Reliable Source of Ionospheric Information Since 1998” by M. Hernández-Pajares, J.M. Juan, J. Sanz, R. Orus, A. Garcia-Rigo, J. Feltens, A. Komjathy, S.C. Schaer, and A. Krankowski in Journal of Geodesy special issue, “The International GNSS Service (IGS) in a Changing Landscape of Global Navigation Satellite Systems,” Vol. 83, Nos. 3-4, 2009, pp. 263–275, doi: 10.1007/s00190-008-0266-1.
Multiple Constellation Processing in the International GNSS Service
By Tim Springer and Rolf Dach
Does combining GPS and GLONASS observations make a difference? The International GNSS Service (IGS) has been providing such data for several years. Representatives from two IGS analysis centers discuss the past, present, and future of IGS GNSS monitoring and product development.
INNOVATION INSIGHTS by Richard Langley
ARE WE THERE YET — at a multiple-constellation GNSS world? The European Galileo system only has two test satellites in orbit, with constellation completion not scheduled until 2014. The Chinese Beidou/Compass system has launched some test satellites, but global coverage is not promised until 2020. And the first Japanese Quasi-Zenith Satellite System space vehicle is scheduled for launch this year with the system not fully operational until 2013. So, does this mean GPS is still the only game in town? No, not by a long shot. We have overlooked Russia’s GLONASS.
Standing for Global’naya Navigatsionnaya Sputnikova Sistema, GLONASS was conceived by the former Soviet Ministry of Defence in the 1970s, perhaps as a response to the announced development of GPS. The first satellite was launched on October 12, 1982. But because of launch failures and the characteristically brief lives of the satellites, a further 70 satellites were launched before a fully populated constellation of 24 functioning satellites was achieved in early 1996. Unfortunately, the full constellation was short-lived. Russia’s economic difficulties following the dismantling of the Soviet Union hurt GLONASS. Funds were not available, and by 2002 the constellation had dropped to as few as seven satellites, with only six available during maintenance operations! But Russia’s fortunes turned around, and with support from the Russian hierarchy, GLONASS was reborn. Longer-lived satellites were launched, as many as six per year, and slowly but surely the constellation has grown to 21, with two in-orbit spares.
But are there any users outside Russia? Although dual-system GPS/GLONASS receivers have been around for at least a decade, manufacturers have taken notice of GLONASS’s recent phoenix-like rebirth. All of the high-end manufacturers now offer receivers with GLONASS capability. Does combining GPS and GLONASS observations make a difference? You bet — just ask any surveyor who uses both systems in the real-time kinematic (RTK) approach. Scientific applications requiring high-accuracy satellite orbit and clock data also benefit. The International GNSS Service (IGS) has been providing such data for several years, and in this month’s article representatives from two IGS analysis centers discuss the past, present, and future of IGS GNSS monitoring and product development.
So, getting back to our question, are we there yet? Many early adopters of GPS plus GLONASS data and products would reply with a resounding “yes.”
“Innovation” features discussions about advances in GPS technology, its applications, and the fundamentals of GPS positioning. The column is coordinated by Richard Langley, Department of Geodesy and Geomatics Engineering, University of New Brunswick.
In 2005, the International GPS Service (IGS) was renamed the International GNSS Service. With this change, the IGS governing board and the IGS community expressed their expectation to extend activities from the well-established GPS to other active and planned global navigation satellite systems such as GLONASS, Galileo, and Compass. Meanwhile, the GLONASS satellite constellation, as well as the IGS GNSS tracking network, have evolved significantly. Since 2003, the GLONASS satellite constellation has been improving steadily, leading to the current, May 2010, constellation with 21 operational satellites and two in-orbit spares. And starting in 2008, the GNSS capabilities of the IGS tracking network have been greatly enhanced giving rise to a truly global GNSS tracking system with more than 100 GNSS (GPS plus GLONASS) receivers. The almost-complete GLONASS satellite constellation, coupled with a readily available global tracking network with high-quality receivers, have greatly increased the interest in and need for GNSS products such as precise satellite orbit ephemerides. However, the IGS analysis center products are still mainly GPS-only. Only two analysis centers provide true multi-GNSS solutions. Two analysis centers provide GLONASS-only solutions (a GLONASS combined IGS product is available but without accurate clocks). No combined IGS GNSS product exists. In view of the large interest from the user community, this is a really disappointing situation. In particular, because experiences gathered with handling GPS plus GLONASS will make the incorporation of other GNSS such as Galileo, Compass, and the Quasi-Zenith Satellite System (QZSS) that much easier.
However, during a meeting of the IGS analysis centers in December 2009, it became clear that many of the centers had started to implement and enhance the GLONASS processing capabilities in their software. This was happening as a direct consequence of the improvements in the GLONASS constellation, the IGS GNSS tracking network, and increased user interest (if not demand). Throughout 2010 and 2011, we will therefore see a significant increase in the number of true GNSS solutions within the IGS. A very positive development for the GNSS world.
In this article, we give an overview of the recent developments in the area of multi-GNSS processing within the IGS in general, but with a focus on the activities of the two analysis centers in the IGS that are leading the GNSS efforts: the Center for Orbit Determination in Europe (CODE) and the European Space Operations Center (ESOC) of the European Space Agency.
Why GNSS?
Within the IGS, we are often confronted with the question: Why GNSS? Why should I go through the burden of adding GNSS capabilities to my software, having larger processing loads, and so on, for little or no benefit? Well, from an IGS analysis center point of view, this question is valid. The accuracies achieved with GPS alone are so good that there will be little visible benefit of including another system. Nevertheless, there are indeed benefits.
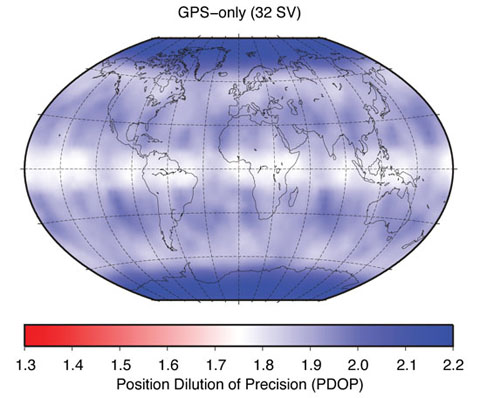
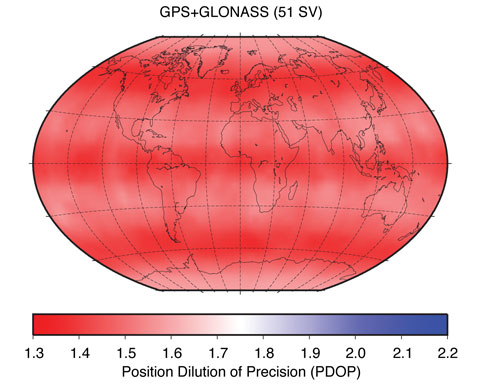
There is a large number of users worldwide who would see benefits of using GNSS products compared to GPS-only products. Clearly, all real-time users will benefit enormously from the increased number of satellites. Figure 1, showing the so-called position dilution of precision (PDOP), demonstrates this very clearly. The two panels in Figure 1 show the GPS-only PDOP and the GPS-plus-GLONASS PDOP using the satellite constellation of May 3, 2009.
FIGURE 1A. Effect of GLONASS on position dilution of precision.FIGURE 1B. Effect of GLONASS on position dilution of precision.
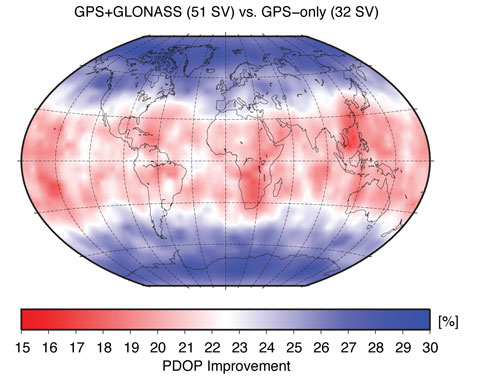
Figure 2 shows the PDOP improvement in percentage when comparing the GPS-only to the GPS-plus-GLONASS PDOP values. At high latitudes, that is, above 55 degrees, the improvement is at the 30 percent level. At mid-latitudes, the improvements are still well above 15 percent, demonstrating the significant improvements real-time GNSS users may expect compared to real-time GPS-only users.
Figure 2. Position dilution of precision improvement using GLONASS.
With the current GPS constellation, daily solutions are not limited by the number of available satellites, but rather by the analysis models (such as that for the troposphere), calibration uncertainties (such as models for antenna phase-center variation), and environmental effects (such as multipath). For these reasons, IGS-like processing strategies, in which data from reference stations are processed in 24-hour batches, will not show clear benefits from adding data from more satellites and other systems.
However, besides real-time users, users at high latitudes (including the whole of Canada and most of Europe) will see improvements. Recently, several researchers have noticed that for latitudes higher than 50 degrees, the addition of GLONASS brings benefit. This is, of course, thanks to the higher orbital inclination of the GLONASS satellites (about 64 degrees) compared to the inclination of the GPS satellites (about 55 degrees), which is also very nicely demonstrated in the PDOP (see Figure 1). So, from a service point of view — the “S” in IGS — there is a clear need to provide GNSS solutions to the user community. Besides offering significant benefits in terms of accuracy, the increased number of satellites will also make solutions more reliable and robust. The completely different repeat cycle of the GLONASS satellite orbits is especially important as it changes the sensitivity to multipath completely. Multipath effects in GPS-only data repeat almost perfectly from day to day with a 4-minute time shift giving rise to spurious, near yearly signals in GPS time series. Satellites from other constellations, such as GLONASS, introduce other system-related frequencies, which results in a general reduction of such GNSS-induced frequencies in a multi-GNSS solution.
Because of the constellation design, each GPS satellite follows its own ground track in each orbit cycle. That means that at a ground station, each GPS satellite is observed on one and the same track each day so that a systematic influence of a satellite (such as a mismodeling of the satellite antenna position with respect to the satellite’s center of mass) has a systematic effect on the obtained (daily) station positions. This systematic translation of satellite-related errors into station-related parameters doesn’t happen for any other GNSS constellation.
IGS GNSS Analysis Centers
A detailed description of the IGS is beyond the scope of this article; an excellent overview was provided in an earlier Innovation column. We simply point out here that it is important to know that the IGS serves as the reference in many GNSS applications by providing data and products of the highest possible quality. Very well known and widely used are the tracking data from the IGS station network — the raw pseudorange and carrier-phase measurements — and the orbit and clock products of the GPS satellites. The IGS generates these products by combining the orbit and clock solutions of the individual analysis centers that contribute to the IGS. For the GPS-only products, 10 different analysis centers contribute to three different product series called the ultra-rapid, rapid, and final products. The final products deliver the highest possible quality but have the longest delay, as they become available 12 days after the end of the observation week. The rapid products are roughly comparable in quality to the IGS final products, but they are delivered daily with a delay of only 17 hours after the end of the observation day. The ultra-rapid products are delivered four times per day 3 hours after the end of the last used observation. For example, at 03:00 UTC, an ultra-rapid product is delivered that used data up to 00:00 UTC. It consists of two parts: an estimated part and a predicted part that may be used for real-time purposes. The quality of the estimated part is very similar to that of the rapid products. The predicted part is, of course, significantly less accurate, although the orbits have an astonishing precision of well below 30 millimeters — much better than that of the orbits in the satellites’ broadcast navigation messages.
In addition to these GPS-only products, there is also a GLONASS product. However, contrary to the GPS side of things, for GLONASS, only a final product is generated. Four analysis centers provide products for the IGS GLONASS combination: the Bundesamt für Kartographie und Geodäsie (BKG), Frankfurt am Main, Germany; CODE, based at the Astronomical Institute of the University of Bern, Switzerland; ESOC, Darmstadt, Germany; and the Information-Analytical Center (IAC) of Roscosmos, Moscow, Russia.
The analysis centers BKG and IAC determine the GLONASS satellite orbits, introducing the information for the GPS satellites from the IGS solution without further estimation. The analysis center CODE provides, since May 2003, orbits for GPS and GLONASS based on a rigorously combined analysis of the data of both GNSS, that is, a true multi-GNSS solution. Since January 2008, ESOC follows this strategy as well. From these four analysis centers, only two, ESOC and IAC, provide satellite clock estimates for the GLONASS satellites. This situation prevents the IGS from making a robust and reliable combined GLONASS clock product. With four analysis centers contributing to the orbits, the IGS can and does make an excellent GLONASS combined orbit product.
In our definition of true multi-GNSS solutions, the measurements from each system contribute to all relevant parameters to the same extent. This can only be achieved by the rigorous combined processing of the data from all available GNSS. The two-step approach, introducing the GPS solution when solving for the GLONASS orbits and satellite clocks, is regarded as an extension of a GPS-only solution to GLONASS. As the contributions from BKG and IAC in the IGS GLONASS product demonstrate, this two-step procedure provides excellent results.
From a user point of view, a big disadvantage is the fact that the IGS does not provide a real GNSS product. The IGS provides a high-quality GPS product and a high-quality GLONASS orbit product, but there is no combined GNSS product. Also, the IGS is only capable of generating final GLONASS products because only two analysis centers, CODE and ESOC, submit GNSS products for the rapid and ultra–rapid products. IGS policy requires contributions from at least three analysis centers for a meaningful and robust combined product.
Users of GNSS orbits and/or clocks therefore have to use the products of one of the individual analysis centers or combine the GPS-only and GLONASS-only products from the IGS. Here, the GNSS products of the CODE and ESOC analysis centers are clearly preferable over those of the IGS and other analysis centers since these are the only two true GNSS products that guarantee the full consistency between the two GNSS.
GLONASS Tracking Network
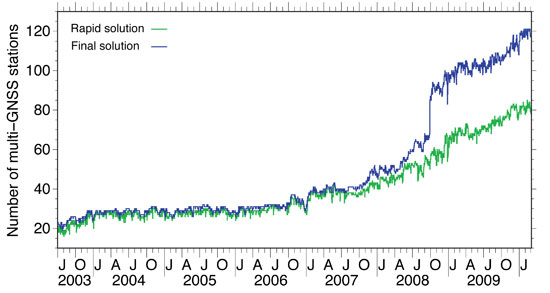
Until 2003, the IGS had established a GLONASS tracking network of merely 20 stations. In 2003, this number grew rapidly from 20 to 30, but after 2003 the number of stations remained stable for quite a long time with a very inhomogeneous distribution. For example, there were only a few stations in the whole western hemisphere. In 2006/2007, a new generation of combined GPS/GLONASS receivers became available, produced by several well–known GPS receiver manufacturers. With this new equipment available, the number of GLONASS tracking stations in the IGS network started to increase steadily. In 2008, the increase rate went up significantly (see Figure 3) and, more importantly, the global distribution of the receivers improved as, finally, significant numbers of stations started to emerge in both North and South America. Orbits and clocks of the GLONASS satellites are, since ear
ly 2009, determined from the data of more than 100 globally well-distributed tracking stations in the IGS network (see Figure 4). A good global distribution of observing sites is extremely important for orbit determination and even more so for the clock determination. Until early in 2008, the GLONASS clock determination suffered from gaps in the global tracking network, which had severe impact on the clock estimates. If tracking gaps cause an interruption of the carrier-phase tracking of a GNSS satellite, the clock estimates are basically reset and a jump will occur. The size of the jump is delimited by the accuracy of the code (pseudorange) observations, that is, at the 1-meter level, or 3 nanoseconds in clock terms.
We may state that today orbit and clock determination for the GLONASS satellites may be based on a truly global tracking network of high-quality geodetic–type receivers. This significant improvement is due to the efforts of many IGS station managers and their institutions.
Figure 3. Number of sites in the IGS network providing GLONASS data, used for orbit determination at CODE.Figure 4. Current distribution of IGS combined GPS and GLONASS tracking stations.
GLONASS Constellation
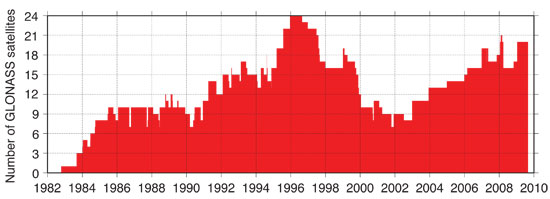
After reaching a full orbit constellation of 24 satellites in early 1996, the GLONASS constellation degraded rapidly due to Russia’s economic difficulties following the break-up of the Soviet Union coupled with the short lifetime of the GLONASS satellites. Since 2002, the GLONASS constellation has slowly but surely been rebuilt (see Figure 5). Currently, there are 21 active modernized GLONASS (GLONASS-M) satellites, which have a significantly longer lifespan compared to the original satellites. Additionally, there are two reserve satellites on orbit.
Figure 5. Development of the GLONASS satellite constellation since 1982.
Russia intends to have a full 24-satellite constellation in place by the end of 2010. To achieve this goal, two more triple-satellite launches are planned, one in August and one in November. The November launch could include a new type of GLONASS satellite, GLONASS-K. The GLONASS-K version is a lighter, unpressurized spacecraft, with a design lifetime of 10 years. In addition to the legacy frequency-division-multiple-access signals, it will transmit code-division-multiple-access signals and use an additional frequency band overlapping with the GPS L5 band.
Orbit and Clock Accuracy
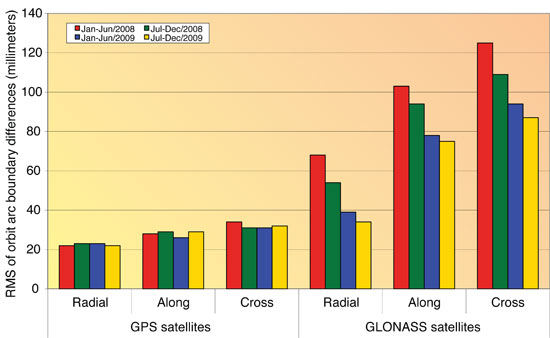
The developments of both the GLONASS tracking capabilities of the IGS station network as well as the steady increase in the number of GLONASS satellites has had a positive influence on the accuracy of the GLONASS orbits and clocks. It also has significantly increased the interest in the GLONASS system. The enhancement of the IGS GNSS tracking network from an almost purely European network to a truly global network between 2008 and now has had a significant impact on the quality of the GLONASS orbits and clocks. To show the effect on the quality of the GLONASS orbit estimates, we look at the difference between two independent consecutive solutions spanning 24 hours from 0 to 24 hours GPS Time. We compare the “midnight point” of both solutions, that is, the solution at the end of one day (or arc) and the beginning of the next day (or arc). This will give us a worst-case estimate for the orbit quality because typically the orbit is less accurate at the boundary of the orbital arc compared to the middle of the orbital arc. We have analyzed these orbit differences for all GPS and GLONASS satellites separately for four half-year time spans using the routine IGS GNSS solutions from ESOC. The differences are computed in three different satellite-orbit-related directions: radial, along-track, and cross-track. The times spans are:
January to June 2008 (6 months)
July to December 2008 (6 months)
January to June 2009 (6 months)
July to December 2009 (6 months)
The results are shown in Figure 6. For the GPS satellites, we cannot see any improvement over time. The quality of the GPS orbits is excellent at the 25- to 35-millimeter level for all three components.
Figure 6. Evolution of GPS and GLONASS orbit quality from January 2008 to December 2009.
Remember, we are looking at the worst-case differences here. For GLONASS, we can see a significant improvement over the four time spans. Early in 2008, the orbit quality was at the 120-millimeter level (cross-track), which has improved significantly to the 85-millimeter level. It is important to note that no processing changes were made during this time interval, and that the improvements are thanks to the improvements in the station tracking network and the GLONASS satellite constellation.
The clock quality is more difficult to assess, but over the timeframe of 2008 to 2009 we have noticed that the clock estimates of the GLONASS satellites have become complete. In 2008, with the still-far-from-global tracking network, there were many gaps in the tracking of the GLONASS satellites. This means that at some epochs no stations were tracking a GLONASS satellite. Such gaps cause jumps in the satellite clock estimates, because the carrier-phase observations become discontinuous, and these jumps are at the 1-meter (3-nanosecond) level. With the improvements of the IGS GNSS tracking network, the GLONASS tracking is now complete and clocks for all epochs are estimated. A comparison of the clocks of the two analysis centers that provide estimated clocks for the GLONASS satellites shows an agreement at the 80-picosecond level, which is only slightly worse than the agreement between the GPS clocks. Significant biases at the few-hundred-nanosecond level exist only in the GLONASS clocks because of receiver internal frequency-dependent delays. The ESOC GNSS orbit and clock products are, however, perfectly suited for precise point positioning using either GPS, GLONASS or, even better, both GNSS simultaneously. It should be noted that since February 2010, the ESOC IGS clock products are now sampled at 30 rather than 300 seconds, which further enhances their suitability.
Conclusions and Outlook
The IGS has promised to become a GNSS service by changing its name in 2005, more than four years ago. Meanwhile, the GLONASS satellite constellation as well as the IGS GNSS tracking network have matured and are practically complete. For the IGS to become a true GNSS service, a substantial number of the analysis centers should provide GNSS contributions to all IGS products: final, rapid, ultra-rapid, and real-time. These products should come from performing a rigorous combined analysis of the observations of all active GNSS satellites. It is expected that over the next two years, we will see a significant increase in the number of true GNSS solutions within the IGS, a very positive development for the GNSS world.
Within the IGS, the analysis centers CODE and ESOC are leading the GNSS efforts. CODE has provided fully consistent GPS/GLONASS products from a rigorously combined processing approach for all IGS products (final, rapid, and ultra-rapid) since May 2003, or for seven years. Since the beginning of 2008, ESOC has followed this good practice for its final products, and in February 2010 ESOC started to produce rapid and ultra-rapid GNSS products. A unique feature of the ESOC products is that they include the clocks for the GLONASS satellites, even with a sampling rate of 30 seconds for the final products. CODE will add GLONASS clocks to its IGS products very soon, during the fi
rst half of 2010. The GLONASS orbit and clock product quality has become comparable to that of the GPS products within the IGS. However, because GLONASS carrier-phase integer ambiguity resolution is difficult, the GLONASS products are and will remain somewhat less accurate than the GPS products.
The experiences gathered at CODE and ESOC by fully combining the observations from the GPS and GLONASS systems will pave the way for the integration of additional systems and signals within the IGS. Hence, IGS will retain its leading position in providing the reference, in the broadest sense of the word, for all GNSS. In the near future, this means the integration of QZSS and Galileo observations as well as the integration of the new triple-frequency signals from the latest generation of GPS satellites, Block IIF, the first of which was scheduled for launch last month.
The positive GNSS developments within the IGS will require an update of the IGS combination software to enable a true GNSS combination. The CODE and ESOC analysis centers have indicated that they are interested in taking on this important task of rewriting and enhancing the IGS orbit and clock combination software to make the IGS a true GNSS service.
Acknowledgments
CODE is a collaboration among the Astronomical Institute, University of Bern (Bern, Switzerland), the Swiss Federal Office for Topography (Wabern, Switzerland), the Bundesamt für Kartographie und Geodäsie (Frankfurt am Main, Germany), and the Institut für Astronomische und Physikalische Geodäsie of the Technische Universität München (Munich, Germany).
The authors are very grateful to the IGS and its numerous contributors for providing the global GNSS tracking data network.
TIM SPRINGER received his Ph.D. in physics from the Astronomical Institute of the University of Bern (AIUB) in 1999. He has been a key person in the development of the Center for Orbit Determination in Europe (CODE), one of the IGS analysis centers, located at AIUB. Since 2004, he has been working for the Navigation Support Office (OPS-GN) at the European Space Operations Centre (ESOC) of the European Space Agency (ESA) in Darmstadt, Germany. In this group, he has led the development of the new ESOC GNSS software, which is used for most GNSS activities at OPS-GN, including GIOVE-A and -B analyses.
ROLF DACH received his Ph.D. in geodesy at the Institut für Planetare Geodäsie of the University of Technology in Dresden, Germany. Since 1999, he has been working as a scientist at AIUB, where he is head of the GNSS research group. He oversees the development of the Bernese GPS Software, used at CODE for activities in the frame of the AIUB IGS analysis center and elsewhere.
“Renovated GLONASS: Improved Performances of GNSS Receivers” by A.E. Zinoviev, A.V. Veitsel, and D.A. Dolgin in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 3271–3277.
“Other Satellite Navigation Systems” by S. Feairheller and R. Clark, Chapter 11 in Understanding GPS: Principles and Applications, 2nd edition, edited by E.D. Kaplan and C.J. Hegarty, published by Artech House, Boston, 2006.
“GLONASS Performance, 1995–1997, and GPS-GLONASS Interoperability Issues” by G.L. Cook in Navigation, Vol. 44, No. 3, Fall 1997, pp. 291–300.
“GLONASS Review and Update” by R.B. Langley in GPS World, Vol. 8, No. 7, July 1997, pp. 46–51.
• The International GNSS Service
“The International GNSS Service in a Changing Landscape of Global Navigation Satellite Systems” by J.M. Dow, R.E. Neilan, and C. Rizos in Journal of Geodesy, Vol. 83, No. 3-4, March 2009, pp. 191–198, doi:10.1007/s00190-008-0300-3; erratum: Vol. 83, No. 7, July 2009, p. 689, doi: 10.1007/s00190-009-0315-4.
“GNSS Processing at CODE: Status Report” by R. Dach, E. Brockmann, S. Schaer, G. Beutler, M. Meindl, L. Prange, H. Bock, A. Jäggi, and L. Ostini in Journal of Geodesy, Vol. 83, No. 3-4, March 2009, pp. 353–365, doi:10.1007/s00190-008-0281-2.
IGS Central Bureau website. IGS FAQ, Site Guidelines, data and product access information, and network details are available: http://igscb.jpl.nasa.gov
• Benefits of Multi-GNSS
“The Benefits of Multi-constellation GNSS: Reaching up Even to Single Constellation GNSS Users” by B. Bonet, I. Alcantarilla, D. Flament, C. Rodriguez, and N. Zarraoa in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 1268–1280.
“Assessment of GPS/GLONASS RTK Under Various Operational Conditions” by R.B. Ong, M.G. Petovello, and G. Lachapelle in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 3297–3308.
“Anomalous Harmonics in the Spectra of GPS Position Estimates” by J. Ray, Z. Altamimi, X. Collilieux, and T. van Dam in GPS Solutions, Vol. 12, No. 1, January 2008, pp. 55–64, doi:10.1007/s10291-007-0067-7.