Helix Geospace will participate in the “Future flights challenge phase 3” project by Innovate UK involving drone swarms. The project aims to demonstrate how large unmanned systems can be used to solve environmental-protection concerns in GNSS-denied environments, functioning in swarms and utilizing a combination of digital twinning, computer vision and real-world flight testing.
The goal of the project is to prove that a single remote operator and local safety pilot can handle many unmanned devices and maintain continuous communication in GNSS-denied environments.
Commercially available antennas are susceptible to jamming and spoofing. DielectriX antennas from Helix Geospace are built into a sophisticated array system that can detect all jamming and spoofing events, pinpoint their precise source, and then eliminate their impact, maintaining the accuracy and resilience of GNSS positioning, navigation and timing in GNSS-denied environments.
Collaboration with NERC British Antarctic Survey and Lancashire fire and rescue will provide proof of exploitation and public engagement for the project. The Windracers aircraft will be equipped with British Antarctic Survey scientific research equipment and flown in the Antarctica region to gather novel research data, previously not achieved before at this scale.
The collaboration with Lancashire fire and rescue will help develop a solution for early fire detection and mitigation. The Windracers aircraft will be retrofitted with sensors and fire mitigation technology providing an airborne system that will patrol high-risk areas.
The United Kingdom’s National Timing Centre will conduct a two-phase series of funded studies and demonstrations focusing on “innovation in the dissemination and application of resilient time, frequency and synchronisation.”
The first round now being advertised is for feasibility studies of projects costing between £50,000 and £250,000. Total funding for the round is £2M. A briefing for interested parties will be held on April 20.
The second round and remaining funding will be devoted to technology demonstrations.
The UK’s National Timing Centre was established in response to several national studies and concerns about the vulnerability of space-based timing services.
Severe solar storms, called coronal mass ejections, were listed on the UK National Risk Register in 2012. While rare, these events can damage assets in space and on the ground.
Next month marks the 100th anniversary of the New York Railroad Storm. It was so powerful, telegraph offices were set on fire in the U.S. and Europe, fuses were blown, and equipment damaged. Even underwater telegraph cable traffic was affected.
Experts say if such a storm were to strike the Earth today, it would likely damage GPS and other GNSS satellites. At a minimum, it would charge the atmosphere and prevent signals from getting through for days.
Projects that will be considered for the UK competition must be technologies and application areas providing trust, assurance, security and resilience for time distribution.
While supported by Innovate UK, the National Physical Laboratory (NPL), which operates the virtual National Timing Centre, appears to be the primary agent for execution. NPL will offer applicants who are selected to participate in the feasibility study phase free technical consultation up to 12 hours, and free access to highly precise and accurate time signals from four NPL locations in the southeast of England.
Since its inception, the National Timing Centre seems to have concentrated on establishing distributed suites of atomic clocks, probably linked by fiber, as a first step to improving the nation’s timing resilience.
Industry observers have opined that future efforts are likely to focus on wireless distribution.
“Wireless requires less infrastructure and has no user limit,” said one. “It only makes sense they would go there once they feel they have a solid clock foundation.”
The competition is open to UK entities. Applications will be accepted April 19-June 9, with accepted participants notified on July 30.
Innovate UK, the United Kingdom’s innovation agency, has selected Hexagon’s Geospatial division to conduct a research project that will result in faster and higher-precision mapping of railway infrastructure through the use of artificial intelligence.
The project is funded by Network Rail, the owner and operator of Great Britain’s railway infrastructure, under its R&D portfolio and delivered by Innovate UK through the SBRI competition, Innovation in Automated Survey Processing for Railway Structure Gauging, Phase One. A small group of teams was selected for this effort.
Image: Hexagon
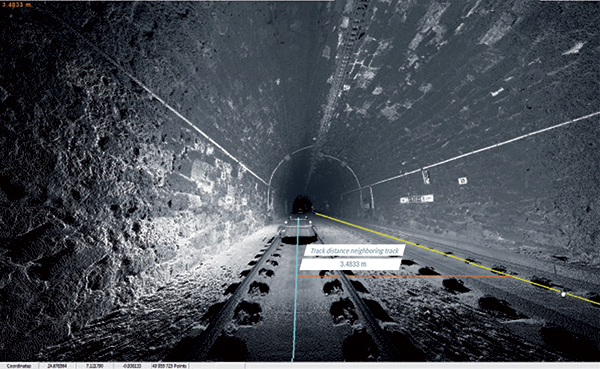
The project will enable Network Rail to automatically identify and measure railway structures from lidar data, saving valuable time and resources, while also improving planning and operations across the rail network. The current, manual process takes analysts months or even years due to the size of the data and the labor-intensive tasks involved.
“The combination of cross-sectional area, shape, length and speed all place a space requirement on today’s railway,” said James Sweeney, senior engineer at Network Rail. “We anticipate this project will offer us a more efficient way to capture, analyse and measure railway features along 20,000 miles of track, which is important to railway safety and the growth and capacity of our network.”
Network Rail collects detailed information about its track and the surrounding features, such as bridges and tunnels. The data is then analyzed to assess clearances between trains and the infrastructure around them, which is key to safety.
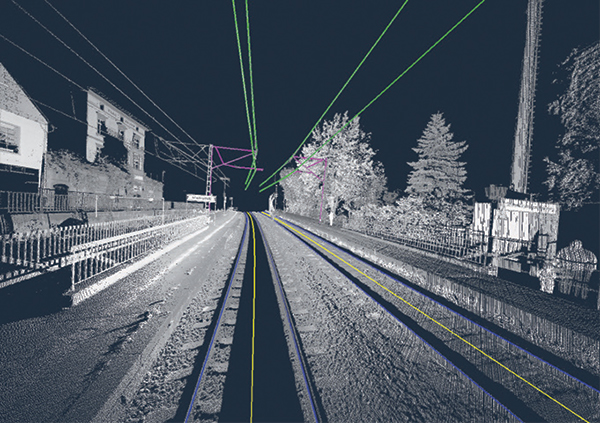
Image: Hexagon
The new project aims to automate the extraction and calculation of railway features from sensor data, leveraging AI to automatically analyze point-cloud data, identify different structure types, and perform measurements on the structures. The data will be collected from reality capture solutions from Hexagon’s Geosystems division.
“Network Rail, supported by Innovate UK, is leading the way in the use of AI to automate rail structure identification and measurement,” said Mladen Stojic, president of Hexagon’s Geospatial division. “We are excited to be part of a project that can help transform the gauging process for UK railways.”
A new case study focuses on improving the endurance and navigational precision of underwater autonomous systems.
Sonardyne, designer and manufacturer of underwater positioning and inertial navigation, describes the challenges to increase navigation capability for subsea monitoring and inspections. Sonardyne joined the National Oceanography Centre (NOC) and L3Harris ASV on a two-year project to develop new positioning technologies to extend the limits of AUVs and UUVs.
The project — Precise Positioning for Persistent AUVs (P3AUV) — is supported with £1.4 million in funding through Innovate UK’s research and development competition for robotics and artificial intelligence in extreme and challenging environments.
Sending autonomous and unmanned underwater vehicles (AUV, also known as UUVs) out on missions that will last for days or weeks, unaided by vessels or other supporting offshore infrastructure, is a major goal for the ocean science, offshore energy and defense sectors.
Photo: Sonardyne
Sustained Ocean Observation. The research community aims for sustained ocean observation without the need for ship support, especially in ice-covered polar areas. Long-duration navigational capability is also a key enabler for persistent covert surveillance operations in the defence sector. And emerging applications include resident seabed-based systems, deep-sea mining, aquaculture and UXO surveys for renewable installations.
Autonomous AUVs would remove the need for a surface vessel, reduce risk to personnel, and reduce costs. Users could survey more seabed for longer and with fewer or even no people offshore.
The team is developing ways to provide greater positioning accuracy for long-endurance operations in deep water, while also reducing power requirements. The team will also be increasing the use of autonomy to make long baseline (LBL) positioning transponder box-in faster and easier, with onboard data processing and calibration.
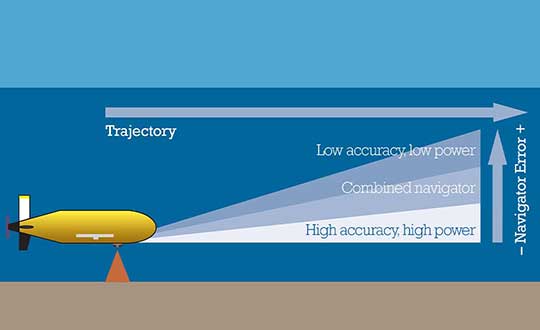
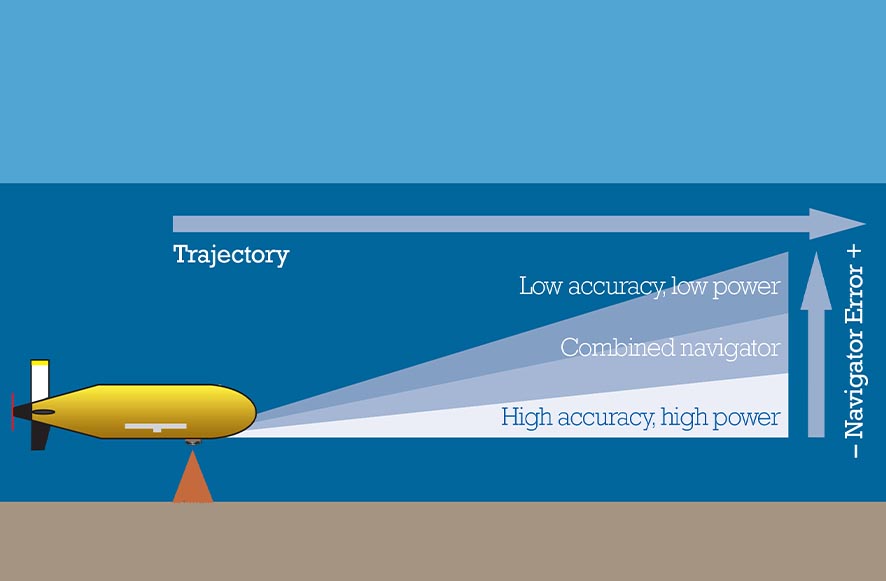
High-power INS input. Central to this work is the AUV’s acoustic and inertial navigation system (INS). Low-power sensors have much lower navigation accuracy and often have to surface to correct positioning error with a GPS fix. The team seeks to integrate low- and high-power sensors to achieve high performance at much lower power consumption.
For instance, the NOC’s Autosub Long Range (ALR) uses a low-power microelectronic mechanical system (MEMS) supported by separate Doppler velocity log (DVL) and ADCP input to calculate how far it has traveled on missions, which can be several months long. To increase the ALR’s positioning accuracy over longer distances, the team is using the Sonardyne SPRINT-Nav all-in-one subsea navigation instrument alongside MEMS technology to work towards high-precision solutions that save space and power.
Image: Sonardyne
Accuracy during ascent and descent. The project also involves improving positioning accuracy when subsea vehicles transition through the water column. This is a notoriously difficult area for AUV deployments, because it relies on the Doppler velocity log (DVL) being able to lock on to the seafloor (bottom lock), so that vehicle XYZ velocities can be calculated, supported by pressure data.
However, DVLs are range limited, so there is often a period where the DVL is out of range. When there are thousands of meters of water between the surface and the seabed, this can introduce significant positioning uncertainty.
By using the acoustic Doppler current profiler (ADCP) capability in Sonardyne’s SPRINT-Nav INS instrument (looking down) and a second Syrinx DVL (looking up), the team could then build up a layer-by-layer profile of the water column velocities to be used as tracking layers.
The objective is to reduce positioning errors significantly during both the dive and surfacing phases of an operation. Results depend on the variability of the current in any given area.
The data collected during the descent and surfacing phases can be processed to provide a full ocean-depth current profile — collection of which is required for many offshore energy projects and can be valuable for ocean research.
Looking around the industry over the last few weeks, there continues to be a flood of innovation that promises new approaches for unmanned aircraft in addressing several new opportunities. This month I cover a flying taxi at the 2019 Consumer Electronics Show (CES) in Las Vegas, greater range for multi-copters using fuel cells, a potential huge drone in the making, and a potential Florida controversy over use of a tethered aerostat — interesting stuff!
Bell Flying Car/Air Taxi
At CES of all places, there was a new idea for air-taxis — not yet a UAV, but with the promise of future autonomous flight, it surely deserves a mention. Bell brought its latest commercial vertical take-off and landing (VTOL) mock-up to CES to test the level of interest in its concept of a flying car.
Lift and directional flight control are provided by six 8-foot ducted fans, each driven by its own electric motor and powered by a turbine-driven electric generation and back-up battery system. Using technology derived from the mil-spec V-22 Osprey Tilt-Rotor and its commercial V-280 cousin, the ducted fans pivot from horizontal for take-off to vertical for forward flight.
The concept vehicle at CES had a seat for the pilot, but the digital flight control system is envisaged to have autonomous flight capability — and there we have another approach for a UAV flying car/air-taxi — from one of the mainstay aviation manufacturers of helicopters with all the necessary experience to make it happen.
Fuel-Cell-Powered UAV Flies for 70 Minutes
There’s apparently a new way to overcome the short duration that is currently available for flying existing multi-rotor drones — don’t just rely on batteries, use hydrogen! Actually a hydrogen fuel-cell configuration that has recently been tested in the UK to extend flight time to 70 minutes, while carrying a 5-kg payload.
Test-drone with Intelligent Energy Hydrogen Fuel-Cell. (AVI screenshot supplied by Productiv)
The UK team includes Intelligent Energy, which supplies the fuel-cell, engineering firm Productiv, and UAS video company BATCAM, with funding provided by Innovate UK, a government-sponsored group that supports novel ventures such as this joint project.
Most existing battery-powered multi-rotor UAVs have endurance in the tens of minute (DJI seems to be approaching 20-30 minutes with some of its drone models). But longer endurance is really important for most operators, especially for capturing lengthy video, hence the interest and participation of BATCAM as the operator/consultant for the project.
Fuel cells provide a number of advantages over batteries with fast refuel, little vibration, quiet operation, zero emission at point of use, and around three times longer flight time. Intelligent Energy is making use of a portable hydrogen refueling system supplied by NanoSUN.
With BATCAM set to begin operational trials, the company is optimistic that further development of hydrogen fuel cells for UAVs will not only enable even longer video broadcasts but will solve the problem encountered with the difficult and expensive international transportation of Lithium polymer batteries.
Airship Moves towards Civil Certification
While we are in the UK, a huge 300-foot-long helium-filled airship called the Airlander 10 is again moving steadily down the path to gain civil approval by the Civil Aviation Authority (CAA), despite a previous crash in November 2017 due to a wayward landing cable.
The latest milestone was just achieved at the end of 2018 when CAA awarded Hybrid Air Vehicles Ltd. (HAV) a Production Organisation Approval, following on from earlier Design Organisation Approval by the European Aviation Safety Agency (EASA) in October 2018.
This behemoth airship is claimed to be the largest aircraft in the world, can carry 10 tons of cargo virtually anywhere on earth, stays airborne for up to five days, and can land almost anywhere. Powered by two forward-mounted rotating ducted fans and two aft fixed fans, all driven by diesel engines, the pressurized helium-filled envelope is 302 feet long, 143 feet wide, 85 feet tall, and has no internal support structures — all this with a cruise speed of up to 80 knots and a maximum altitude of 20,000 feet.
The Airlander is aimed at bulk cargo transport, but could also handle communication and observation/reconnaissance roles in both the military and commercial sectors. And it’s not so far away from becoming the largest unmanned aircraft in the world, either, should things eventually turn in that direction. Could there be potential for a greater payload without the extensive provisions for a pilot, with lower operating costs, potentially greater range and speed and/or operational altitude?
Miami Police use Tethered Aerostat
Miami police have been using a tethered aerostat to monitor large gatherings, such as the Dec. 28 Orange Bowl-related party called the Capital One Beach Bash. Presumably this use had a safety related motivation, and there was hopefully no intent to spy on partygoers.
However, I just became aware that police cannot fly drones in Florida to surveil people — there’s a law against it. But there is a provision in the Florida “Freedom from Unwarranted Surveillance Act,” which starts off: “If the law enforcement agency possesses reasonable suspicion that, under particular circumstances, swift action is needed to prevent imminent danger to life or serious damage to property,…”. Now, I’m no lawyer, but it would seem that this exclusion might possibly allow the Miami cops to monitor large gatherings where there might be a need to watch out for people’s safety – that generally being what we employ the police to do for us.
But the Florida lawmakers certainly believe that there is clearly a need to protect people’s privacy and to prevent unauthorized monitoring of an individual’s activities using drones. The provisions of Florida Statute 934.50 prohibits “the observation of such persons with sufficient visual clarity to be able to obtain information about their identity, habits, conduct, movements, or whereabouts” — a good thing to do to protect our freedom of movement and basic rights.
But you have to ask yourself if a general prohibition on the use of drones by police is the best thing to do when other police departments around the U.S. are gaining advantages from drone usage by speeding up and improving the accuracy of traffic accident investigations, for search and rescue, in crime scene reconstruction, for disaster response, and of course for improving officer safety — in fact, all the things that are already achieved through the use of police helicopters, but at a fraction of the cost.
Florida Statute 934.50 already has a significant number of allowable exceptions to enable a “law enforcement agency” and others to operate drones legally, but could it also be possible that these wider benefits of drone use might be fully exempted without infringing any personal liberties?
Conclusion
To sum up, we have a big aerospace company jumping in to help shape the future of unmanned air taxis; another drone fuel-cell application that significantly extends flight time; and progress towards certification of an airship that has benefits as a drone. Finally, police use of a tethered aerostat at an event stirs potential controversy, while other police forces benefit from the use of drones — a mixed bag of drone ventures that seem to have great potential.
Intelligent vehicles and smart devices could gain more accurate location awareness by fusing GNSS and Wi-Fi signals. A test for this is the focus of an Innovate UK project led by Spirent Communications and involving the Warwick Manufacturing Group (WMG) at the University of Warwick.
The £694k Enhanced Assured Location Simulator Leveraging Wi-Fi and GNSS Sensor Fusion (ELWAG) project will seek to develop and test the pioneering hybrid Wi-Fi and GNSS location system in a cost-effective, repeatable and safe environment so that manufacturers can verify its performance.
International Manufacturing Centre at WMG. (Photo: WMG)
Researchers at WMG, led by Matthew Higgins, will play a significant role in the project. They will take physical layer measurements of both Wi-Fi and GNSS signals in autonomous vehicle scenarios in and around the University of Warwick campus and the local urban road network.
The measurements will then assist in Spirent’s development of an RF propagation model that will overlay RF effects on its Wi-Fi Access Point simulator.
WMG researchers will then perform RF validation and verification activities around the developed model, to provide a level of assurance on its performance.
“The safety and functional assurance of future autonomous vehicles will be one of the many critical paths to large consumer adoption,” said Higgins, who is an associate professor in the intelligent vehicles group at WMG. “Through this project, we will contribute towards providing innovative solutions to the challenges of using sensor fusion in this testing context.”
“This is a highly technical project, which will require a holistic understanding of the signal propagation characteristics between satellites, infrastructure and vehicles. The results will impact future autonomous testing methodologies,” said Erik Kampert, senior research fellow at WMG.
The ELWAG project will run for 18 months, and also involves Chronos Technology.
Project background. Many devices currently rely on a singular location technology (typically GPS), which is one type of the wider eco system of GNSS. These systems, whilst becoming more capable, still suffer at times from the user’s environment — typically in urban areas where buildings and other cityscape features interfere with the signal.
The urban environment is, however, where most users need to know their location to the highest level of accuracy, due to increasing population or device density. Wi-Fi signals exist almost universally within dense urban areas, so there is a possibility of fusing these signals with the GNSS signals to identify one’s location very accurately.
“Currently Wi-Fi access point plus GNSS simulation can only be achieved in an ad hoc manner and does not allow for the testing of moving vehicles, multipath effects, insertion of data errors, spoofing and above all controlled, repeatable testing,” said Mark Holbrow, director of engineering and product development at Spirent’s positioning business unit.
“In the autonomous vehicle sector location accuracy can vary by up to 5 meters, which is unacceptable from a safety perspective. Bringing that accuracy down to 30 centimeters through sensor fusion will have substantial implications for autonomous navigation.”
Self-aware smart devices. The need for smart devices to have a highly accurate self-awareness of their own location, and the location of other smart devices around is becoming increasingly important.
In applications such as autonomous vehicles and transport systems, accurate location awareness is an obvious operational requirement for their safe operation in and around other vehicles, pedestrians or infrastructure.
In the personal devices space, smartwatches, phones and health monitoring and exercise aids are all striving to be able to make a judgment of the user’s state based upon location.
In the emergency and security services space, knowing the location of people and objects is also increasingly important as to target response capabilities effectively.
Geographic data specialist Bluesky has secured funding from the United Kingdom’s innovation agency, Innovate UK, to investigate the potential of mobile phones for capturing accurate 3D spatial information.
Designed to reduce the costs of monitoring and managing essential infrastructure, such as overhead electricity cables, and mitigate the effects of potentially damaging vegetation, the Bluesky-led study will assess the feasibility of extracting 3D measurements from standard smartphone video footage.
Using specialist software and specially developed photogrammetric algorithms, it is possible to compute depth values for individual pixels within overlapping images taken from video to create dense 3D point clouds of an object or scene, Bluesky said.
Working in partnership with ADAS, an environmental consultancy, Bluesky will provide experience gained through previous data capture and management projects with electricity distribution network operator (DNO) companies in the UK and overseas.
The initial application of this innovative use of mainstream technology would be the accurate measurement of vegetation encroachment in the field for maintenance purposes. The company will also explore other applications of the solution in sectors such as forensics, insurance and emergency response.
World Market
DNO companies spend millions monitoring and maintaining clearance between trees and power lines, with the market potential in Europe alone estimated at £10 million per annum.
By using readily available mobile phone technology, Bluesky hopes to reduce this cost of overhead networks, both power and telecommunications, across the world, and provide managers with an easy-to-use and easy-to-update efficient audit trail.