A new draft policy in India seeks to foster global use of its Indian NavIC satellite navigation system. The draft Indian Satellite Navigation Policy 2021 (SATNAV Policy 2021) is part of reforms of the Indian Space Research Organisation (ISRO)/Department of Space (DoS).
“ISRO/DOS shall work towards expanding the coverage from regional to global to ensure availability of [the] NavIC standalone signal in any part of the world without relying on other GNSS and aid in wide utilization of [the] Indian navigation system across the globe,” states the policy document.
DoS will push NavIC for global use to meet demand for positioning, navigation and timing in commercial, strategic and societal applications. It aims to ensure the continuous availability of free-to-air navigation signals for civilian uses, while providing secured navigation signals for strategic uses.
The draft document plans for continuity of NavIC and GAGAN services, while also ensuring Indian satellite navigation and augmentation signals are compatible and interoperable with other GNSS/SBAS signals. The International Telecommunication Union (ITU) regulated frequency allocation to prevent interference among signals from different systems. This interoperability allows users to seamlessly switch from one constellation system to another and results in improved navigation signal, especially in a situation where an area is obscured from one satellite system.
DoS will continue to work with ITU for frequency allocation. It will also take part in the United Nations Committee on Peaceful Uses of Outer Space (UNCOPUOS), International Civil Aviation Organisation (ICAO) and International Maritime Organisation (IMO).
In addition, ISRO will provide technical support for academic institutions in GNSS research and applications.
Firefighters in Slovenia. (Photo: tomazl/E+/Getty Images)
Public Safety Communication Europe (PSCE) and the European Space Agency (ESA) have signed a Memorandum of Intent (MoI) to support the use of satellite applications for public safety.
ESA and PSCE will work together under the new MoI towards establishing interoperable public safety communications systems.
The MoI will support the emergence of space-based applications in the public-safety domain such as public safety services relying on secure mobile broadband communication solutions. These include applications within disaster preparedness, response and resilience, situational awareness, assessments of damages, navigation-based services for tracking and coordinating rescue forces on-site and for emergency vehicles.
“ESA Space Solutions and the 4S Strategic Programme Line will support through this agreement the emergence of solutions making use of secure satellite communications for institutional public safety user communities,” said Rita Rinaldo, ESA. “This can be achieved as of today through existing satellite telecommunications infrastructures. In the future it will be possible to make use of new and innovative infrastructures with enhanced capabilities. Early pilots and demonstrations will showcase the unique benefits granted by satellites to the user communities and early adopters.”
“The cooperation with ESA will help to explore complementary solutions that will contribute to cover capability gaps and needs for public safety. It is of extreme importance to improve public safety communication systems with cutting-edge and rapidly deployable solutions that will facilitate PPDR missions,” explained Marie-Christine Bonnamour, PSCE.
The first step for ESA and PSCE cooperation will be PSCE participation in ongoing user studies on “Satellite Applications for Public Safety.” PSCE will help identify the needs of public safety stakeholders such as emergency services, fire brigades and law enforcement.
Europe’s EGNOS satnav system has been providing safety-of-life services for 10 years. EGNOS, the European Geostationary Navigation Overlay Service, transmits signals from a duo of satellite transponders in geostationary orbit.
The satellite-based augmentation system (SBAS) gives additional precision to U.S. GPS signals, delivering an average precision of 1.5 meters over European territory, as much as a 10-fold improvement over unaugmented signals. EGNOS also provides confirmation of GPS signal integrity through additional messaging identifying any residual errors.
While the EGNOS Open Service has been in general operation since 2009, EGNOS began its safety-of-life service in March 2011.
The European Space Agency (ESA) designed EGNOS as the European equivalent of the U.S. Wide Area Augmentation System (WAAS), working closely with the European air traffic management agency Eurocontrol. ESA then passed EGNOS to the European GNSS Agency (GSA) to run operationally.
Guiding airliners
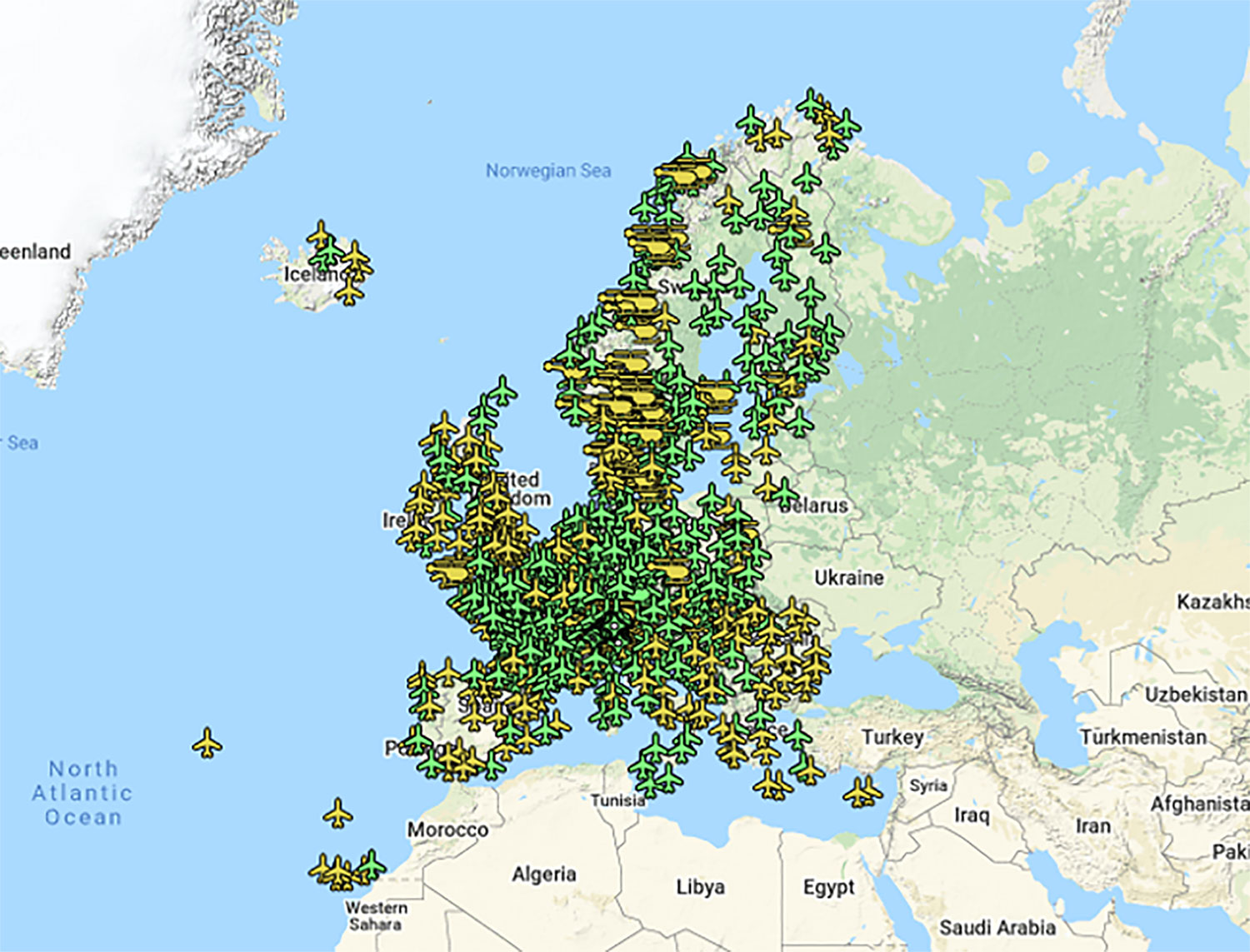
EGNOS’s primary customer is aircraft. Without guidance from the ground, pilots using EGNOS can confidently descend in bad weather to 60 meters’ altitude before needing to make visual contact with the tarmac.
On March 17, 2011, France’s Pau Pyrénées Airport was the first airport to use EGNOS. Today, more than 385 airports and helipads and 60 airlines across Europe use EGNOS-based LPV-200 approaches (short for Localizer Performance with Vertical guidance – 200 feet). The EGNOS service requires no ground equipment, and replaces the radio guidance beamed upward by traditional CAT I instrument landing system (ILS) infrastructure with no decrease in performance.
As of March 2021, more than 385 airports and helipads and 60 airlines across Europe are using EGNOS-based LPV-200 approaches. (Image: ESA)
Serving drones
EGNOS is now being eyed as the enabler of unmanned aerial vehicles (UAVs). The GSA has supported numerous trials of drones equipped with EGNOS as well as Galileo through its EGNSS4RPAS project. Crewed aircraft are expected to be vastly outnumbered in our skies by all kinds of UAVs, employed for everything from weather and environmental monitoring to personalized delivery services.
U-Space is Europe’s program to integrate drones into the airspace. (Image: ESA)
The traditional person-based air traffic control model will need to evolve to accommodate such a shift, based on automated monitoring, traffic management and collision avoidance. In Europe, this highly automated version of air traffic control is termed U-space.
EGNOS’s safety-of-life service is essential to making this happen, moving from today’s situation — where drones are limited to specific air corridors and line-of-sight operations — to let them roam freely but safely in busy airspace and built-up areas.
“The whole idea behind EGNOS’s safety-of-life has been to render satellite navigation sufficiently reliable for any kind of use,” explained Didier Flament, who leads ESA’s EGNOS team. “After 10 years of faultless operations, new applications are becoming plain. Drone flight is one example. EGNOS is also being evaluated for train positioning as well as assisted and autonomous automobile driving.”
EGNOS, the next generation
ESA retains responsibility for the system’s evolution, and the middle of this decade should see the debut of its new generation, EGNOS v3.
“While the current system only works with single-frequency GPS signals, EGNOS v3 will operate on a multi-frequency, multi-constellation basis, able to augment all available satellite signals in both L1 and L5 bands, including Galileo,” Didier said. “The result will be far enhanced performance and reliability.
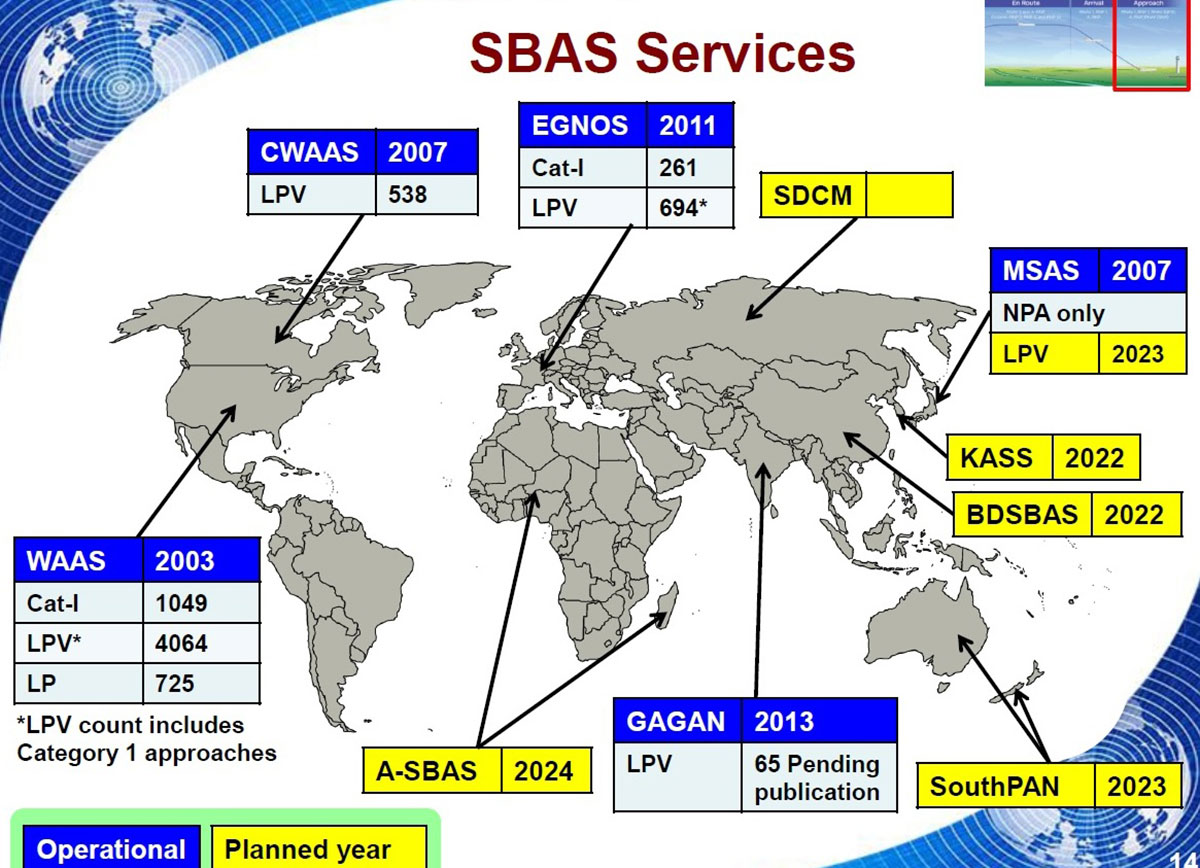
“In addition, we are working with developers of other SBAS around the globe to ensure they stay fully interoperable so for instance EGNOS-equipped aircraft can fly between continents on a seamless basis. Such interoperability, combined with the arrival of the other SBAS systems under development in other regions, will lead to a quasi-global worldwide safety-of-life service coverage in the year 2030.”
Operational and planned satellite-based augmentation systems (SBAS) around the globe. (Image: ESA)
The meeting will be open to the public up to the seating capacity of the room. Visitors will be requested to sign a visitor’s register.
The agenda for the meeting includes the following topics:
Examine methods to protect, toughen and augment (PTA) access to GPS/GNSS services in key domains for multiple user sectors.
Examine emerging trends and requirements for PNT services in U.S. and international fora through PNT Advisory Board technical assessments, including backup services for terrestrial, maritime, aviation and space users.
Update on U.S. Space-Based PNT Policy and GPS modernization.
Explore opportunities for enhancing the interoperability of GPS with other emerging international GNSS.
Prioritize current and planned GPS capabilities and services while assessing future PNT architecture alternatives with a focus on affordability.
Assess economic impacts of GPS/GNSS on the United States and in select international regions, with a consideration towards effects of potential PNT service disruptions if radio spectrum interference is introduced.
Review the potential benefits, perceived vulnerabilities, and any proposed regulatory constraints to accessing foreign Radio Navigation Satellite Service (RNSS) signals in the United States and subsequent impacts on multi-GNSS receiver markets.
Meeting times are 8:30 a.m. to 5:30 p.m. Eastern Time on Thursday, June 6; and 9 a.m. to 1 p.m. ET on Friday, June 7.
Meeting address:
Westin Hotel Alexandria Old Town
400 Courthouse Square
Alexandria, VA 22314
Full details on the meeting can be found in the Federal Register Notice. For more information, contact James J. Miller, designated federal officer, Human Exploration and Operations Mission Directorate, NASA Headquarters, Washington, DC 20546, (202) 358-4417, fax (202) 358-4297, or [email protected].
The United Nations’ International Committee on GNSS (ICG) held its 13th meeting in Xi’an, China, Nov. 4-9. Attendees included the four major GNSS: GPS (United States), GLONASS (Russia), BeiDou (China) and Galileo (Europe). Also attending were representatives from Japan, India and delegates from 16 countries and regions.
Members called for further strengthening of the interoperability and transparency of GNSS to help more countries enjoy the developments in positioning, navigation and timing, according to China Global Television Network.
On Nov. 7, China and Russia signed a cooperation agreement for BeiDou and GLONASS, stressing that the two systems begin testing service aims for countries along China’s Belt and Road.
More than 400 delegates across the world also watched the demonstration of applications based on China’s BeiDou system, which includes drones and vehicle positioning technology that could be used by self-driving cars.
The positioning system was tested on a bus with accuracy reaching millimeters, as shown in a video on this page. This technology lays the foundation for the management of urban traffic.
The solution, which will incorporate oneM2M’s current TTA-run certification program, recognizes the critical importance of mobile technologies in IoT-enabled M2M solutions — a trend that is set to accelerate with the advent of 5G.
oneM2M certification through GCF will be key to ensuring proper functionality and compliance with industry standards for fast, efficient, and secure IoT solutions in the connected world, GCF said.
Technologies which comply with oneM2M standards will ensure seamless connectivity and interoperability with back-end networks, as well as allowing for safe and secure transactions. TTA’s mission is to support global oneM2M certification services and will significantly benefit the IoT and M2M industry.
Image: GCF
“This development underlines GCF’s expertise in developing certification programmes for advanced mobile technologies in industry verticals,” said Lars Nielsen, general manager at GCF. “It complements our strategy of expansion from core telecoms technologies into IoT applications to service the emerging 5G ecosystem. GCF is collaborating with world class organisations such as oneM2M and TTA to enable the growth and proliferation of the IoT connected devices ecosystem.”
oneM2M is a global organization which creates technical specifications, common use cases and architectural principles to ensure that machine-to-machine communications can operate effectively on a worldwide scale. oneM2M architecture is based on a common M2M service layer, which can be readily embedded within vendors’ hardware and software solutions, ensuring interoperability between the myriad of IoT devices in the field and M2M application servers worldwide.
“GCF’s work with TTA highlights the growing global momentum for tested interoperability in IoT devices and applications,” said Patrick Van de Wille, marcom chair at oneM2M. “Our membership numbers are steadily increasing as organisations recognise the benefits of reducing the complexity through a global standard. All stakeholders will reap the rewards from improved productivity and reduced costs, which will ensure the sustained growth of the IoT transformation.”
TTA has been the at the fore of oneM2M certification since 2014 and is the official oneM2M testing and certification organization.
The announcement is the culmination of work TTA has carried out to expand the testing and certification service, keeping up-to-date with oneM2M standards and providing feedback on the standards by collaborating with overseas testing institutes.
“We are extremely pleased to have this partnership with GCF that supports the increasing importance of oneM2M standardisation in the global IoT market,” said Park-Jae-Moon, president of TTA. “This is a critical milestone in our journey from setting up the very first oneM2M certification solution for Korea, to meet regional needs. Now we can offer this on a global level to ensure interoperability and set a benchmark for quality that will enable a successful future for IoT connectivity.”
The United States and China have negotiated compatible signal characteristics that will both protect and enhance service for users of the U.S. GPS and Chinese BeiDou constellations.
The achievement resulted from several years of discussions between U.S. and Chinese GNSS experts. The consensus to make the systems compatible and interoperable at the user level will mean better service for users of both systems worldwide.
The U.S.Department of State’s Bureau of Oceans and International Environmental and Scientific Affairs Office of Space and Advanced Technology represents the United States in the ongoing U.S.-China GNSS Cooperation Dialogue, which began in May 2014 and covers various topics.
Compatibility of the Chinese BeiDou Navigation Satellite System (BDS) with GPS has been a core focus of the discussions. The U.S.-China Joint Statement on signal compatibility and interoperability is below and on the gps.gov website.
Joint Statement on Civil Signal Compatibility and Interoperability Between the Global Positioning System (GPS) and the BeiDou Navigation Satellite System (BDS)
December 4, 2017
In May 2014, China Satellite Navigation Office and the Office of Space and Advanced Technology, U.S. Department of State, jointly established the U.S.-China Civil GNSS Cooperation Dialogue, a bilateral government-to-government mechanism to promote cooperation between the U.S. Global Positioning System (GPS) and the Chinese BeiDou Navigation Satellite System (BDS).
Over the past three years, representatives and experts from both sides have studied and discussed various topics related to civil service provision and user applications, among which BDS compatibility and civil interoperability with GPS is one of the core focus areas.
Both sides have carried out extensive in-depth analysis, and have engaged in persistent discussion and coordination.
As a result, the two sides have reached the following consensus conclusions regarding compatibility and interoperability between GPS and BDS:
Consistent with the bilateral frequency compatibility coordination completed in 2010, GPS and BDS are radio frequency compatible under the framework of the International Telecommunication Union (ITU); and
The GPS L1C and BDS B1C civil signals, using two different types of multiplexed binary offset carrier (MBOC) waveforms are interoperable, which means users can receive better service by jointly using these civil signals without a significant increase in receiver cost or complexity.
Both sides agree to continue their consultations and cooperation related to compatibility and interoperability in order to provide better services for global users.
(signed by)
Ran Chengqi, China Satellite Navigation Office
David A. Turner, Office of Space and Advanced Technology, U.S. Department of State
For more information, contact [email protected]. Follow the Bureau of Oceans and International Environmental and Scientific Affairs on Twitter at @StateDeptOES.
The Arctic SDI Pilot is sponsored by the United States Geological Survey (USGS) and Natural Resources Canada. The goal is to demonstrate to Arctic stakeholders the diversity, richness and value of a Spatial Data Infrastructure (SDI) based on web services and standardized exchange formats in helping address critical issues impacting the Arctic.
Stakeholders include national and pan-Arctic science and monitoring organizations and decision makers engaged in Arctic research, social and economic policy, and environmental management. The organizations participating in the ArcticSDI Pilot will document and publicize best practices that can support a rich network of web-accessible data and service resources for the Arctic.
The pilot has two phases.
Phase 1, an OGC Interoperability Program Concept Development study, began in December 2015. In Phase 1, project planners are building an inventory of currently available Arctic geospatial data layers and web services and defining the Arctic SDI architecture. This work will be supported by partners engaged in industry, research, and numerous jurisdictions. A Request for Information will be published in January 2016 to elicit further ideas, experiences, and projects in industry, research institutions and public administration to make maximal use of the ArcticSDI and to develop it further.
The Arctic SDI Pilot Phase 1 will also provide direct input into OGC’s major Testbed 12 Interoperability Program initiative. USGS has indicated that sponsor funding will be made available for Testbed 12 to test and further develop components identified in the Arctic SDI pilot. Through this collaboration, arctic stakeholders and the Arctic SDI will leverage and benefit from the leading-edge interoperability research, development and outreach that is ongoing in the OGC’s series of major testbeds.
All findings from Phase 1 will serve as input for Phase 2, which will be an OGC Interoperability Program Pilot Project. OGC pilot projects apply and test OGC Standards in operational applications using Standards Based Commercial Off-the-Shelf (SCOTS) products that implement OGC Standards. Pilot projects provide an operational implementation so that users and technology developers can collaborate and learn how to better address their requirements using standards-based architectures.
To articulate the value of interoperability via standards, technology provider participants will implement the recommended Arctic SDI architecture in support of Arctic policy scenarios. A video will be produced to engage policymakers on the benefits of integrating diverse data utilizing Arctic SDI standards and information management best practices.
The OGC is an international consortium of more than 515 companies, government agencies, research organizations, and universities participating in a consensus process to develop publicly available geospatial standards. OGC Standards support interoperable solutions that “geo-enable” the web, wireless and location-based services, and mainstream IT. OGC Standards empower technology developers to make geospatial information and services accessible and useful with any application that needs to be geospatially enabled.
Through its support for OGC specifications, ArcGIS users can access data and services from many different sources, regardless of the technology used by those sources, Esri said. In addition, users can share their content with others, including non-Esri users, contributing to the larger goals of the open data movement.
“Our goal is to help our users be successful, and Esri sees technical interoperability as a key driver to successful implementations,” said Dr. Satish Sankaran, Esri product manager for interoperability and member of the OGC Architecture Board.
The OGC leads the development of geospatial interoperability standards. Esri is a long-standing, active OGC participant, helping GIS users to seamlessly work together, Esri said.
Esri’s first OGC compliancy certificates were granted in 1999, and many more Esri ArcGIS platform products have met OGC compliancy since then.
For some years now, we have been talking about GNSS interoperability. The concept has received so much careful attention at conferences, in R&D laboratories, in international working group forums, and behind closed high-level government and military doors, that one might understandably conclude that we have talked interoperability into existence.
Not quite. Not nearly. Not by the farthest, if measuring into the next decade constitutes far, reach of our actual, real-world grasp.
“If you can imagine it, you can achieve it.” William Arthur Ward, a professional inspirer of the 20th century, said that.
For nearly as many years now, we have been talking about GPS and GNSS backup. Similarly, the concept has undergone careful examination and much repeated (’til blue in the face) urging and warning and alarum-
sounding and planning and conjecturing and running through the halls of Congress. One might understandably conclude that we have conjured backup for critical infrastructure into actual, tangible, effective existence.
Again, not quite.
“Everybody talks about GPS backup, but nobody does anything about it.” Mark Twain said that.
April’s GLONASS downfall prompted distinguished industry leaders to again take up cudgels for multi-GNSS and for redundant PNT. They deserve and require our support, on all fronts, whether in the public arena, the lab, or the marketplace. But neither concept yet exists, truly and pervasively, that is to say effectively for all users.
When will reliable, robust, consistent and continuous positioning, navigation, and timing become a reality? Should we rely on whatever technology we currently possess until the perfect system comes available, or should we continuously upgrade at each iterative step along the way?
We take up this topic in our June 5 webinar, “How Much Farther to the Promised Land? Purchase Decisions in the Evolving Landscape of GPS, Multi-GNSS, and Alternative PNT.”
Four speakers will present:
a high-precision GNSS manufacturer,
a mass-market GNSS manufacturer,
an alternative PNT provider,
a design and manufacturing firm,
followed by questions from you, our audience. Come for a glimpse into the future, and estimations of its distance and time of travel from current location.
Among the key insights: technology changes too fast to wait until the next generation of a product to add new capabilities, when doing so risks loss of competitive edge or, worse, risks introducing a new product already obsolete. A mid-lifecycle component change can deliver both greater performance and cost savings. For details on this prior to June 5, visit the White Paper section of our website.
In the mass market, individuals around the world are creating vast quantities of location data and GPS traces using not only GPS, but also Russia’s GLONASS, Europe’s Galileo, China’s Compass, and India’s Regional Navigational Satellite System. The value of this data and the value chains that produce it will increase significantly with an increase in interoperability of these satnav systems. Currently, non-interoperability represents a serious obstacle to the growth of the GPS market.
The overall system-of-system’s diversity of data formats, data models, processing models and associated custom- built one-to-one communication interfaces significantly inhibits introduction of new subsystems and also new GPS-dependent systems that would support development of future classes of stakeholders. “Many-to-many” networks based on open standards can create interoperability as well as opportunities for the introduction of new technologies, value-added data products, and new users.
To address this problem, sponsors of the 2012 Open Geospatial Consortium (OGC) OWS-9 Interoperability Testbed, including the U.S. National Geospatial-Intelligence Agency (NGA), documented a set of use cases and associated interoperability requirements, selected strategically to address problems whose solutions would be applicable in a wide variety of GPS value chains.
Technology providers participating in the testbed then implemented standards-based solutions that addressed the requirements. These were documented in a draft Engineering Report, “Use of SWE Common and SensorML for GPS Messaging.” The document focuses on the use of the OGC Sensor Web Enablement (SWE) Common Data 2.0 encodings to support an interoperable messaging description and encoding for the next-generation GPS message streams into and out of processing services that provide improved GPS navigation accuracy.
Standards. The OGC Sensor Web Enablement (SWE) suite of standards specifies models and XML encodings that provide a framework within which the geometric, dynamic, and observational characteristics of all types of sensors and sensor systems can be defined.
Furthermore, through standard web-service interfaces, one can task sensor and actuator systems and have immediate access to observations and alerts. SWE standards, now widely implemented around the world, enable developers to make all types of networked sensors, transducers, and sensor data repositories discoverable, accessible, and usable via the Web or other networks. OGC standards are downloadable at no charge, for use by anyone.
OGC Testbed
The OGC OWS-9 testbed’s OWS Innovations thread included a hands-on prototyping activity that addressed a particular set of interoperability requirements related to GPS accuracy.
GPS relies on accurate knowledge regarding the position, measured time, and state of the satellites, provided to GPS devices and processing centers in the form of satellite ephemeris data and status reports. The accuracy of the system relies on communication between the satellites themselves, the data collection systems, the data processing centers, and the GPS devices that ultimately determine their own location. This communication is through various data streams that consist of predefined message structures and encodings.
The accuracy of the positions derived from GPS can be negatively affected by several well-known factors. Improvements to the derived positions within the current operational system can occur (1) through occasional (once a day or once every few hours) updates to the satellites’ clock and ephemeris on-board information, or (2) through post- processing for applications such as geodetic surveying or image processing and georectification. Efforts are underway to provide more timely updates to satellites or positioning devices to improve the accuracy of positioning in real-time.
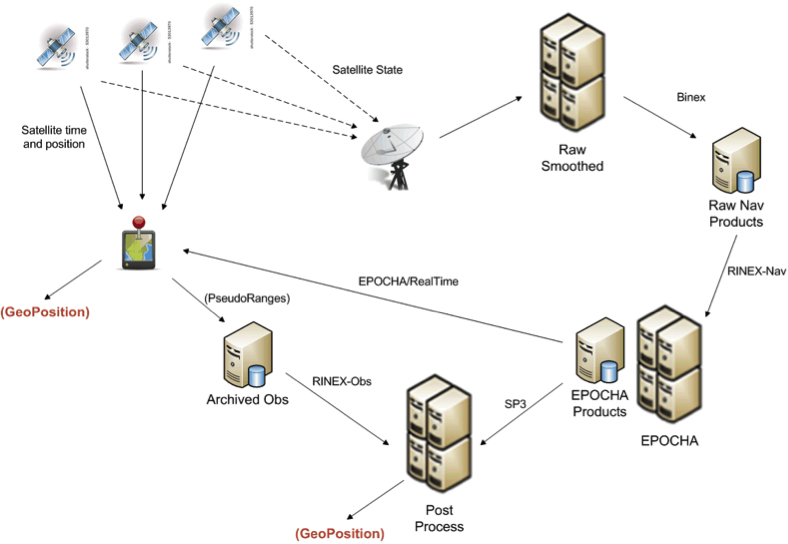
The GPS Correction Process
One view of the current system for correcting GPS positioning is provided in Figure 1. A GPS positioning unit (shown as a device with red thumb tack) receives signals from four or more GPS satellites derives its position. In addition, the information being sent by all satellites in the GPS system is also received at various receiving stations, stored as raw navigation data, and used to correct the clock and position information for all of the satellites. The correction process can utilize one or more operational processing systems for correcting satellite clock and ephemeris information. Each of these systems tends to utilize particular data sources and often output their results in different message structures and encodings.
FIGURE 1. Typical flow of data within the GPS correction system.
One such system for correcting the timing and positioning of GPS satellites is Estimation and Prediction of Orbits and Clocks to High Accuracy (EPOCHA). Currently, navigation and timing improvements are only uploaded to the satellites and GPS devices once a day. To improve the EPOCHA system, the National Geospatial Intelligence Agency (NGA) is researching the logistics and benefits of updating the navigation and timing information at much shorter time frames (for example, every 2–15 minutes).
The corrected satellite clock and state data can then be sent to the satellites, to the processing centers to improve geolocation of real-time or archived positions or remotely sensed observations, and to devices in the field to improve real-time position measurements.
A processing system in widespread use for applying these corrections to positional measurements is the open-source GPS Toolkit (GPSTk). This software was used in OWS-9 to demonstrate the processing of SWE Common encoded GPS data within a Web-enabled environment.
As shown in Figure 1, the data flowing between archiving and processing components exist in a wide variety of formats. Currently, these message streams consist of message structures defined through various documents, some of which have restricted access. Additionally, these streams and the messages they contain are being encoded in various formats, including, for example, a binary exchange format (BINEX), a system-specific XML schema, an HDF5 file format, several text-based formats, and others.
The message components within each of these formats are inconsistent, even though two messages may describe similar information. Often a processing system is required to read data and output results in multiple formats and to understand the inconsistencies between them.
By forcing different software and processing systems to support multiple message structures and data formats, the current system inhibits the effective use of these data by:
requiring several format-specific readers and writers to be developed in the appropriate software language (C, C++, Java, Python) as required by each application system;
providing inconsistent message structures between the data used or produced by different processing systems;
requiring meticulous and thus error-prone human interpretation of the data components based on the limited documentation provided for each;
creating lack of interoperability with regard to using data designed for or produced by a different particular processing system; and
discouraging development of new and innovative software and processing solutions.
The Engineering Report addresses the feasibility of using the OGC SWE Common Data v2.0 standard to support all message and data streams within future generations of the GPS operational network. In particular, the effort focuses on message streams that provide input to and output from the processing systems responsible for providing improved position and time accuracy within the GPS network.
Here are the benefits of the SWE Common Data standard:
The data can be fully described in a machine- and human- readable XML document providing: data type, units, constraints, semantics, quality, labels, and so on; and an unambiguous definition of both the data structure and encoding of messages/records.
The data values themselves can be encoded in highly efficient binary or ASCII text blocks or streams.
A single software application is able to read any data described in SWE Common data.
Any process can be described in SensorML using SWE Common as inputs, outputs, and parameters.
Any SensorML-defined process can participate in easily-defined executable workflows.
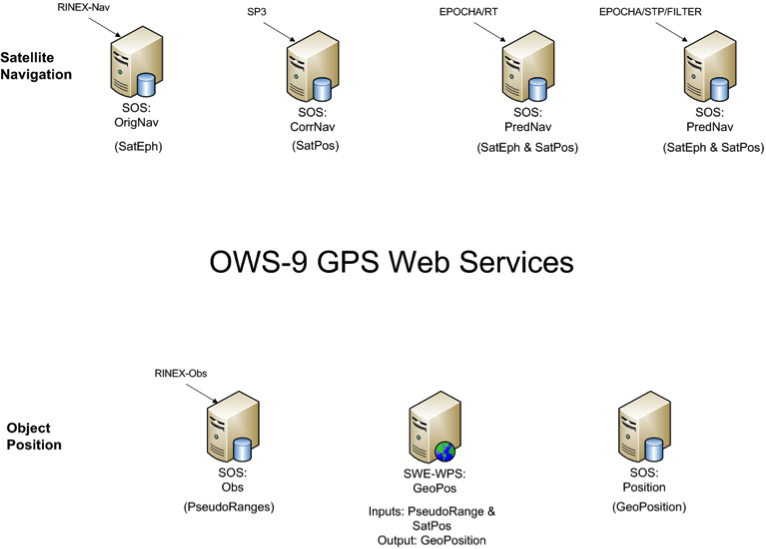
The Engineering Report describes the formats and how they were encoded, and the Web services created to move data between various GPS processing systems (FIGURE 2).
FIGURE 2. Collection of SWE services providing on-demand access to all GPS-related data in the project.
Conclusions
A common standards framework for all data files and streams within the GPS system would significantly improve interoperability between data centers, processing centers, and user tools.
In addition to a common encoding, common models for equivalent message or data records would also be important for interoperability among data, processing centers, and the tools. Common models and a common data framework enable rapid reconfiguration of workflows using different GPS processing products. Likewise, the availability of a common Web service interface enables one to rapidly and flexibly request specific data products and feed them into an executable workflow.
Here are further benefits:
SWE Common Data framework is fully self-described and machine readable.
Common models for all data would support “mix-and-match” capabilities within the processing workflows.
SWE Web services enable on-demand access to various GPS data products using a common framework.
SWE Common Data enables use of SensorML for readily defining and executing various workflows on demand.
Future Directions
Further research and development should move closer to a highly interoperable GNSS system that meets the needs of a broader community of users and enables the development of new supporting software by outside communities. Thus the following are recommended:
Design and reach consensus on consistent data models for all message types in navigation, observation, and state data streams.
Incorporate SWE Common Data readers/writers in the GPSTk toolkit.
Create SensorML descriptions for GPSTk apps.
Demonstrate on-demand design and execution of SensorML-defined workflows for GPS correction.
Demonstrate on-demand geolocation of UAV, ground-vehicle, and hand- held sensors using SWE services and encodings.
Some of these needs will be addressed in the OWS-10 Testbed that is currently ramping up in the OGC.
MIKE BOTTS is president and CTO of Botts Innovative Research, Inc, specializing in the design and application of open standards for sensor systems. He is the creator and chief architect of Sensor Model Language (SensorML), an OGC technical standard for describing the measurement and processing of observations from virtually any sensor system.
The opening plenary session of the Munich Satellite Navigation Summit is convening as this column goes to the electronic press for distribution. Coverage of these top-level system briefings before a select international GNSS audience in Munich will appear in two e-newsletters next week, The European GNSS and Earth Observation Report (EAGER), and in a shortened form via the Navigate! Weekly.
Until then, here’s an update on the CNAV debate in the United States and wider system-operator background from two recent meetings.
CNAV So Far. In the closing hours of 2013, a departing U.S. Cabinet under-secretary for Transportation dropped a verbal bomb on the Pentagon, in the form of a communiqué expressing concern about reliability of the new civil navigation message (CNAV) signal scheduled to emanate in April from select GPS satellites on orbit. Subsequent explosions were detected in halls from Washington to Colorado and Los Angeles.
Meanwhile, one semi-public organization communicated to its members that it finds nothing disturbing about the plan, set to take effect sometime in the coming month.
IGS Steps Forth on CNAV. The International GNSS Service, a voluntary federation of more than 200 worldwide agencies that pool resources and permanent GPS and GLONASS station data to generate precise GPS and GLONASS products, issued a statement to its members and participating institutions in March. “We are confident that the IGS network is not at risk due to this change, and it is a welcomed step towards GPS modernization.”
The communiqué from the Infrastructure Committee went on to say that “This event is considered innocuous to the stability of the receiver network since during a limited GPS CNAV test campaign in June 2013 the IGS network was not affected, only a very specific receiver problem was detected by the IGS Multi-GNSS Experiment, which was informed to the GPS ground segment and addressed.
“Most modern receivers can track L2C and L5 and the CNAV messages, but the decoded messages should not be used by the receivers. The traditional L1 NAV messages (LNAV) will continue to be transmitted as usual and thus the receiver navigation files, birds, etc., will continue unaffected. Older receivers will be completely unaffected as they do not track L2C or L5.
“In any case IGS Station Operators and Station Network Managers are advised to keep an eye on receivers and on their data outputs during the start of the CNAV activation. Just in case something strange is observed please stop data submission and notify the IGS (Network Coordinator, Infrastructure Committee) so that we may investigate the issues quickly. In case of doubt with your own equipment please contact the receiver manufacturer and inform the IGS.”
PNT Advisory Board Airing. Prior to the appearance of the CNAV letter from the departing deputy secretary, the U.S. PNT Advisory Board heard a report in early December from Air Force Space Command on said implementation plan for the GPS CNAV message on L2C and L5. The minutes of that meeting were recently released.
The minutes relay the gist of General Whelan’s CNAV remarks as: “CNAV has been under discussion for a considerable time. Currently, L2C and L5 signals are being transmitted, but without a navigation message. AFSPC is working hard to activate these messages as soon as possible. One of the reasons for the delay is that additional time was needed to complete testing prior to activation. Testing began in late summer 2013 and, based on initial test results, a way ahead has been plotted. . . . Current plans are to begin initial broadcasting in the spring of 2014. CNAV uploads will occur twice weekly. The signal will meet GPS Standard Positioning System (SPS) standards, but may not achieve current accuracy levels until full implementation in late 2014.
“CNAV live-sky testing occurred in June [2013] and was conducted in cooperation with civil, industry, and international partners. The two-week test series included independent assessment and verification. The tests identified four errors that required action. The first, which was addressed in real time, related to implementation of the test series. The second required improvement to the tools suite, which should be totally integrated into the ground segment by December 2014. The third and fourth errors required patches to satellite software. All four issues are now regarded as closed.”
A subsequent presentation to the PNT Advisory Board from a Department of Transportation spokesperson did not directly mention CNAV, according to the meeting minutes, but did include this reminder on civil signal monitoring:
“DOT is responsible for performance monitoring of GPS civil signals. The International Committee on GNSS’s (ICG’s) transparency principle states that ‘Every GNSS provider should publish documentation that describes the signal and system information, the policies of provision, and the minimum levels of performance offered for its open service.’ Currently, this is only done on GPS L1 C/A signals. Performance standards for L2C and L5 have not yet been established. The crucial function of signal/service monitoring is to verify that commitments to GNSS performance are being met. Additionally, monitoring improves the situational awareness for GNSS operators, and provides assurance that any civil service failure is detected and resolved promptly.”
Other Global Developments. The International Committee on GNSS (ICG) held a meeting of its Working Group A on Compatibility and Interoperability, in November 2013 in Dubai, United Arab Emirates. A brief summary of those proceedings is now available.
The notes evidence steady, deliberate organizational and international progress on collaboration between system providers of GNSS signals.
Among new presentations to the body came several from Russia. Viktor Kashenko, Russian Federation, presented on the “Prospects for Status and Development of GLONASS System Space Complex,” an update on the GLONASS space segment noting that there is a full constellation of GLONASS-M satellites. CDMA signals at L1 and L2 are expected to be available beginning around 2016 or 2017.
Grigory Stupak, Russian Federation, followed with a presentation titled “SDCM Present Status and Future GLONASS Signals Development.” There are currently 22 SDCM ground stations around the world with a goal of creating seamless coverage throughout Russia with LPV-200 capability. The U.S. asked a question about whether SDCM provides corrections for other constellations in addition to GLONASS. The Russian Federation explained that SDCM currently augments both GLONASS and GPS, but additional constellations could be added in the future.
Oleg Denissenko, Russian Federation, discussed the goals of the GNSS Monitoring and Assessment System being developed in Russia and identified a list of parameters to be monitored by the international systems.
Xurong Dong from China gave the status of the International GNSS Monitoring & Assessment Service for OS (iGMAS). Initial operational capability (IOC) is expected in June 2014. Ten tracking stations have been installed so far, and 25 additional stations are expected to be added in the future. A signal quality monitoring station has also been established in China and a new 40-meter antenna is expected to be installed in 2014.
Jeffrey Auerbach from the U.S. State Department presented on outcomes of the second Interference Detection and Mitigation (IDM) April 2013 workshop. The European Union noted that they are conducting a survey of professional users in Europe about privacy concerns, and perceptions and understandings of interference and jamming.
Stanislav Kizima, Russian Federation, provided an overview of the International IDM system concept and recommended the creation of an IDM system database server to be used for monitoring GNSS facilities. He suggested identifying formalized data exchange formats for IDM. A question was asked about whether something like this already exists in Russia. Kizima responded that Russia does have an active system for monitoring interference, but not specifically for GNSS. There are some issues with the existing system because GNSS is not listed as source of interference and the technical facilities are not able to analyze parameters specific to GNSS. Hence the need for development of specific GNSS monitoring facilities. Tom Stansell from the U.S. responded that cell phones could be enabled to become individual detectors of GNSS interference, and the interference source location could be determined this way. This technique is known as crowdsourcing. Kizima noted that cell phones give information on signal power, but not measurement equipment.
China continued the session on spectrum protection with a presentation by Weimin Zhen on a proposal to develop a template for GNSS interference detection and reporting. He suggested that a generic template specific to reporting GNSS interference be developed.
Upcoming principal WG-A related meetings:
WG-A Inter-session Meeting, Geneva, Switzerland, possible dates July 16-18, 2014)
 A new draft policy in India seeks to foster global use of its Indian NavIC satellite navigation system. The draft Indian Satellite Navigation Policy 2021 (SATNAV Policy 2021) is part of reforms of the Indian Space Research Organisation (ISRO)/Department of Space (DoS).
A new draft policy in India seeks to foster global use of its Indian NavIC satellite navigation system. The draft Indian Satellite Navigation Policy 2021 (SATNAV Policy 2021) is part of reforms of the Indian Space Research Organisation (ISRO)/Department of Space (DoS).