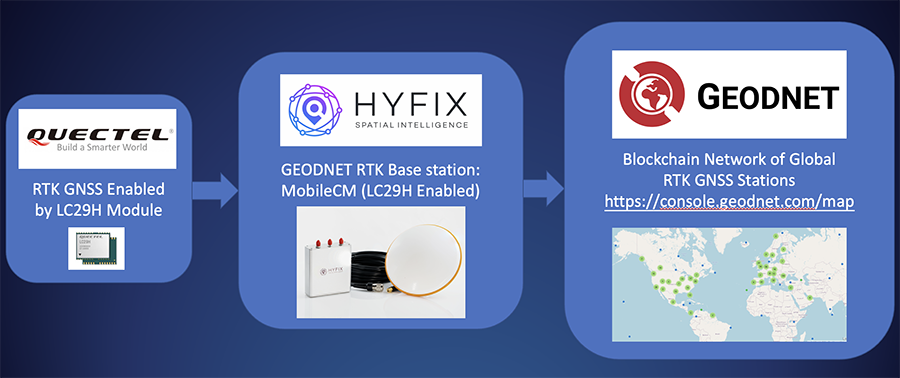
HYFIX.AI, an internet of things (IoT) GNSS and precise location company, has announced the availability of a GEODNET base-station using the LC29H module from Quectel Wireless Solutions.
The Mobile Centimeter (MobileCM) base station is a dual-band GNSS base station for real-time kinematic (RTK) precise-positioning applications in autonomy, agriculture, construction/survey, drones and geo-science applications.
Introduced at the Institute of Navigation’s 2021 ION GNSS+ conference, the Global Earth Observation Decentralized Network, GEODNET, received a best presentation award and has rapidly grown since official launch in early 2022.
The MobileCM station automatically uploads real-time satellite data to GEODNET via a Wi-Fi-based internet connection. MobileCM base-stations are self-hosted and receive GEODNET token rewards while powering both commercial AIoT as well as citizen science climate change applications.
The Quectel LC29H module is a surface-mount low-power 135-channel dual-band receiver that hosts both RTK and dead-reckoning algorithms such as the HYFIX.AI Embedded Centimeter (EmbedCM) stack. Using GNSS corrections from a service such as GEODNET or other network, the LC29H modules can achieve position accuracy of 10 cm in a variety of real-world conditions.
The HYFIX.AI MobileCM base-station embeds the LC29H as well as the ATECC608B CryptoAuthentication engine. An included installation kit provides a survey-grade triple-band GNSS antenna, primary antenna cable, and roof-top installation hardware.
“Quectel is excited to continue its partnership with HYFIX.AI to deliver precise GNSS positioning accuracy of 10 cm in the real world using our dual-band LC29 family of GNSS modules,” said Mark Murray, vice president of sales for GNSS and automotive at Quectel Wireless Solutions.
“HYFIX.AI is pleased to continue support of Quectel’s dual-band LC29 GNSS modules and introduce a new turn-key GEODNET base station for global precise positioning,” said Mike Horton, chief executive officer of HYFIX.AI.
Tall buildings block GNSS signals, making satellite navigation in urban canyons very challenging. (Photo: RoschetzkyIstockPhoto/iStock/Getty Images Plus/Getty Images)
GPS positioning for navigation and mapping is challenging in urban environments, where GPS signals often are blocked by tall buildings. The following three papers — to be presented at the Institute of Navigation (ION) GNSS+ conference Sept. 19–23, 2022 — explore ways to solve that problem. The full papers will be available at www.ion.org/publications/browse.cfm following the conference.
ALGORITHMS FOR URBAN MAPPING
In this work, the authors use an urban environment model incorporating visibility predictions and remote-sensing techniques, which they tested in a sensor-equipped vehicle in Denver. They use an interacting multiple model (IMM) filter that uses extended Kalman filters to build and verify a map of the signal environment in an urban-canyon setting. The techniques will give ground-vehicle operations the ability to plan for blocked and delayed signals for global path planning.
Zeller, Emma; Strandjord, Kirsten, University of Minnesota; and Wang, Pai, Shanghai Jiao Tong University; “Algorithms for Mapping the Urban Signal Environment for Navigation of Ground Vehicle Operations.”
ADDING VISUAL TO GNSS/INS
GNSS real-time kinematic (GNSS-RTK) positioning is a key technology for surveying and mapping applications. To extend the capability of GNSS in difficult environments, a tight coupling between GNSS-RTK and an inertial navigation system (INS) can greatly improve the results. If the time spent in a GNSS outage is too long or if the kinematic of the survey is too weak, the GNSS/INS solution can be compromised with high navigation errors, ultimately making it impossible to align the heading angle at initialization.
This paper presents an innovative solution to overcome GNSS/INS limitations, minimizing system complexity by using a tightly coupled GNSS/INS solution with a monocular visual inertial SLAM system. This solution is capable of initialization in a few seconds and is very reliable in the long term. This vision/INS/GNSS coupling increases the overall RTK fix rate and broadens the availability of high-precision navigation solutions under challenging conditions.
Bénet, Pierre; Saussay, Brice; Saidani, Mourad; and Guinamard, Alexis; SBG Systems; “Tightly Coupled Inertial Visual GNSS Solution: Application to LIDAR Mapping in Harsh and Denied GNSS Conditions.”
USING 3D BUILDING MODELS
To solve the urban-navigation challenge, the authors propose using a 3D building model to assist GNSS positioning. This type of algorithm is named the 3D building model aided GNSS (3DMA GNSS). It can predict measurement errors and the visibility of the satellites, as line-of-sight or non-line-of-sight. The solution is then derived from the likelihood of the observed and predicted measurements over candidate locations.
The authors propose an innovative method for evaluating the reliability of building models based on the awareness of sky visibility in a specific geographic context. Sky visibility estimation is improved with use of a support vector machine regression and considering low-Earth-orbit (LEO) constellations. The real-time sky visibility could present the update of the surrounding buildings, whereas the predicted sky visibility based on the existing building models remains unchanged. Making use of this inconsistency, the authors could identify areas with the updated building. Additionally, the impacts of the building update monitoring on the 3DMA GNSS are evaluated in an urban canyon.
Xu, Hao-Sheng and Hsu, Li-Ta; Department of Aeronautical and Aviation Engineering, The Hong Kong Polytechnic University; “Urban Buildings Update Monitoring Based on Sky Visibility Estimation using GNSS and LEO.”
Spirent GNSS Foresight predicts where and when unmanned vehicles, air taxis and drones can operate safely and dependably beyond visual line of sight
Spirent Communications plc has launched Spirent GNSS Foresight, a cloud-based solution that lets operators know in advance where and when GPS or GNSS positioning is reliable for unmanned and autonomous journeys.
GNSS Foresight accurately predicts where and when unmanned vehicles, air taxis and drones can operate safely and dependably beyond visual line of sight (BVLOS), especially in urban areas where buildings frequently obstruct GNSS signals.
The service addresses a key issue facing developers and operators of unmanned aerial systems (UAS) and autonomous vehicles. Because GNSS performance can be unpredictable in urban and suburban areas from signals being obscured or blocked by buildings, autonomous systems have not been able to rely on GNSS for accurate positioning.
GNSS Foresight will be shown publicly for the first time at ION GNSS+ 2021 in St. Louis, Missouri (Sept. 22–24).
“Accurate, reliable GNSS performance is a key enabler of game-changing innovations that are shaping our future — autonomous drones, air taxis, cars and trucks,” said Spirent’s vice president of PNT Assurance, Jeremy Bennington. “GNSS Foresight overcomes navigation and positioning challenges by providing real-world situational awareness ahead of time for pre-flight, or for real-time performance improvement, through a cloud-based service. It can be used to determine areas that are always safe to fly or operate in, in addition to finding the exact time in a degraded area when specific operational requirements can be met. GNSS Foresight enables operators to enhance efficiency, safety and ROI through the resulting operational improvements.”
Spirent GNSS Foresight’s ability to accurately predict where and when autonomous systems will perform enables users to scale operations or services by expanding operational areas, reducing the number of system disengagements, and providing a greater level of safety and reliability assurance when reducing — or ultimately removing — human involvement in the driving or piloting task.
GNSS Foresight can produce forecasts using data from any of the world’s satellite constellations, and is of particular interest to the aviation and UAS sector, as well as the automotive industry. It will be shown publicly for the first time at ION GNSS+ in St Louis (Sept. 22–24).
Of the hundreds of papers researchers presented at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following four focused on autonomous vehicle positioning for automobiles on city streets. The papers are available at www.ion.org/publications/browse.cfm.
Digital Maps with Tethered Positioning
The authors propose a new method for tight integration of digital map and dead-reckoning (DR) system (inertial measurement unit plus wheel odometer) to provide reliable navigation solutions in challenging GNSS environments for extended periods. Integrated DR and GNSS have been widely used as the backbone of any navigation system for the internet of things (IoT) and vehicle navigation applications. Dollar-level micro-electro-mechanical system (MEMS) inertial measurement units (IMUs) aided by vehicle-wheel odometers have been recently used as low-cost DR systems to bridge GNSS gaps in harsh environments, such as urban canyons, tunnels and under bridges.
However, DR drift errors rapidly increase over time and cannot satisfy most IoT and land-vehicle navigation requirements. Plus, the GNSS receiver may fail to provide accurate position or even experience a complete outage for more than 15 minutes, causing the tethered positioning error to reach several hundred meters. Because land vehicles are supposed to travel on roads, feedback from a digital map can be used to constrain their position.
The authors used a fuzzy-logic map-matching algorithm to identify the correct road segment on which the vehicle moves. A feedback filter senses a correct map-matched position as well as the road segment as measurement updates to the Kalman filter (KF) of the tethered positioning system. The proposed tight integration of digital maps and a DR system is evaluated using datasets collected by Profound Positioning Inc. in Calgary, Alberta, Canada. Results show the proposed method has an average of 0.15% of relative horizontal position error for Calgary datasets — a considerable improvement over the tethered-solution-only with 3.3% of relative horizontal position error. The average azimuth error of the proposed system is 1.3 degrees, while the tethered positioning system shows an average azimuth error of 9.7 degrees.
Citation. Yashar Balazadegan Sarvrood, Haiyu Lan, Aboelmagd Noureldin, Naser El-Sheimy and Profound Positioning Inc., Calgary, Alberta, Canada. “Tight Integration of Digital Map and Tethered Positioning and Navigation Solution for IoT applications and Land Vehicles.”
5G Signals for Opportunistic Navigation
This paper presents a navigation framework in which 5G signals are used for navigation purposes in an opportunistic fashion. A carrier-aided code-based software-defined receiver (SDR) produces navigation observables from received downlink 5G signals. The SDR produces navigation observables from 5G signals and a navigation filter in which the observables are processed to estimate the user equipment’s position and velocity.
An experiment was conducted on a ground vehicle to assess the navigation performance of 5G signals. In the experiment, the vehicle-mounted receiver navigated using 5G signals from two 5G base stations (also known as gNodeBs, or gNBs) for 1.02 km in 100 seconds. The proposed 5G navigation framework demonstrated a position root-mean-squared error of 14.93 m, while listening to signals from only two gNBs.
Citation. Ali A. Abdallah, Kimia Shamaei and Zaher M. Kassas, “Assessing Real 5G Signals for Opportunistic Navigation.”
Using Low-Cost Onboard Sensors
For autonomous vehicles, accurate positioning must be ubiquitous — reliably available at all times and in all places in which the vehicle is expected to operate. While GNSS commonly provides the basis for absolute positioning, it suffers from the problem of availability whenever a direct view of enough satellites is not possible. To address this failure mode, additional complementary sensors can be added to the overall navigation solution through a technique known as sensor fusion. Sensors such as inertial measurement units (IMUs), cameras, lidars, radar and more can be selected in such a way that the individual shortcomings of each sensor are mitigated, and the overall robustness and reliability are improved.
Although current autonomous-vehicle applications employ sensor-fusion techniques, they tend to rely on high-performance sensors to meet the accuracy requirements. These high-performance sensors tend to induce a much higher cost burden than would be acceptable for commercial production, and therefore make mass autonomy too expensive.
This paper focuses on using the lower cost sensors already available on most modern vehicles. These include low-resolution odometry and consumer-grade IMUs currently used for dynamic stability control and wheel-slip detection. A novel approach for combining vehicle speed, steering angles, transmission settings and multiple odometry inputs is presented along with achievable results while operating under a GNSS-denied environment. The test trajectory mimics a typical parking structure with many corners and short, straight segments. The only a priori information required for the filter is the wheel track and wheelbase (separation distance of the wheels).
A 90% performance improvement compared to the stand-alone GNSS/INS solution was observed during GNSS outages of up to 30 minutes. Furthermore, up to a 50% improvement was observed when comparing the multi-odometry to the single-odometry outages during the same 30-minute outage condition. Beyond GNSS outage performance, this paper shows how the use of the extra input to the filter can improve the positioning system’s protection levels to allow for more frequent engagement of the autonomous navigation system.
Citation. Ryan Dixon, Michael Bobye, Brett Kruger and Jonathan Jacox, “GNSS/INS Sensor Fusion with On-Board Vehicle Sensors.”
Radar and INS/GNSS
An autonomous vehicle requires a ubiquitous, accurate, precise and reliable localization system. Many sensors can be used for positioning and navigation, each with its strengths and weaknesses. Inertial measurement units (IMU) are usually used to build inertial navigation systems (INS). INS can be accurate for short durations; however, an INS accumulates errors and loses its accuracy quickly, especially when using low-cost MEMS-based sensors. GNSS can provide an absolute position and velocity to update the INS over time. A barometer provides absolute elevation information, and an odometer provides a speed update.
An integrated navigation solution consisting of an IMU, a GNSS-RTK receiver and odometer can perform well in open-sky areas and on highways. This system can achieve lane-level accuracy most of the time based on the condition of the sensors and the quality of the measurements. However, in downtown and urban environments, the degradation, multipath and blockage of the GNSS signal leads to poor performance for such an integrated navigation system, which is challenged to maintain lane-level positioning.
This paper presents a version of AUTO (formerly known as Coursa Drive), a real-time integrated navigation system that provides an accurate, reliable, high-rate and continuous navigation solution for autonomous vehicles by integrating INS, RTK GNSS, odometer and radar sensors with TomTom’s HD Maps. AUTO performs a tight nonlinear integration of the radar data and maps with the INS/GNSS/odometer system.
Results demonstrate that radar measurements and HD Maps can be tightly integrated with INS/GNSS in an effective manner, such that the integrated system can provide a high-rate, accurate, reliable and robust navigation solution. This is a crucial requirement for realizing a fully autonomous vehicle that can operate in urban environments under a wide range of conditions, including adverse weather and lighting conditions, even in downtown areas with degraded or denied GNSS signals.
Citation. Abdelrahman Ali, Billy Chan, Amr Shebl Ahmed, Medhat Omr, Dylan Krupity, Qingli Wang, Amr Al-Hamad, Jacques Georgy and Christopher Goodall, “Tight Coupling Between Radar and INS/GNSS with AUTO Software for Accurate and Reliable Positioning for Autonomous Vehicles.”
The ION GNSS+ 2021 technical program is online, and registration for the event is now open. ION GNSS+ 2021 takes place Sept. 20-24 at the St. Louis Union Station Hotel in St. Louis, Missouri.
ION GNSS+ 2021: GNSS + Other Sensors in Today’s Marketplace, is the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation, and the world’s largest technical meeting and showcase of GNSS and GNSS-related technology, products and services.
“It’s exciting to be meeting in-person in St. Louis,” said Lisa Beaty, ION executive director. “We are expecting a pent-up demand as the community is eager to convene and get caught up. The ION GNSS+ 2021 technical and commercial exhibit is the best opportunity of the year to see what’s been happening in PNT [positioning, navigation and timing].”
ION GNSS+ 2021 features more than 300 technical presentations under two technical tracks: Commercial and Policy, and Research. The opening Plenary Session will feature two keynote addresses: “Towards a Smart Digital Reality: Building a Sustainable Future,” presented by Burkhard Boeckem, and “Artemis: Return to the Moon” presented by Steven Clarke, NASA.
For those unable to attend in person, ION GNSS+ 2021 will include a virtual option. Registration offers access to all on-demand conference content, live streams of select sessions, proceedings, as well as recordings of the sessions that were live streamed during the conference. ION GNSS+ Virtual Registration includes virtual contact with ION GNSS+ exhibitors and CGSIC’s technical program.
To view the ION GNSS+ 2021 technical program and to register, go to ion.org/gnss.
Abstracts for the ION GNSS+ 2021 show, “GNSS + Other Sensors in Today’s Marketplace,” are due March 5.
ION GNSS+ 2021 will be held Sept. 20-24 at the St. Louis Union Station Hotel. The show will also include a virtual option.
The 2021 show will feature in-person presentations with video presentations for remote viewers. It’ll also cover two tracks: commercial and policy tracks, and research tracks.
The commercial and policy tracks will include high performance and safety critical applications, status and future trends in GNSS, and mass market and commercial applications. The research tracks will include multisensor and autonomous navigation, algorithms and methods, and advanced GNSS technologies.
Authors whose abstracts are accepted in these sessions (either as a primary or as an alternate presenter) will have the option to have their papers peer-reviewed.
The conference will feature two tracks: commercial and policy, and research. The commercial and policy tracks include high performance and safety critical applications; status and future trends in GNSS; and mass market and commercial applications. The research tracks include multi sensor and autonomous navigation; algorithms and methods; and advanced GNSS technologies.
The conference will also feature a new competition, the High Precision GNSS Positioning on Smartphones Competition. According to ION, participants will use a pool of GNSS datasets collected from smartphones and accompanied with high accuracy ground truth to achieve the best accuracy with the datasets provided. The winner will be based on the accuracy of the results. Team winners will win a cash prize, the opportunity to present their results during ION GNSS+ 2021 and be recognized during the ION GNSS+ Awards Ceremony, ION added.