GeoCue has released the TrueView 535 imaging system for UAVs, and the TrueView 720, its fourth-generation Riegl integration. It also launched its LP360 software add-on called 3D Accuracy and the Accuracy Star hardware.
TrueView 535 is built on TrueView 515’s technology and consists of updated lidar sensors, adding a third return, increasing mapping abilities below canopy. An additional third nadir camera offers another point-of-view and improves photogrammetry quality. It also includes a longer, usable lidar range to increase flexibility.
TrueView 535. (Image: GeoCue)
TrueView 720 is a fourth-generation Riegl VUX-120 with three laser beam orientations. It provides high point-density corridor mapping. Using the Riegl VUX-120 with three laser beam orientations (nadir, +10-degrees forward and –10-degrees backward) and three oblique/nadir cameras enables data collection from more surfaces in one flight path.
Trueview 720. (Image: GeoCue)
One application of TrueView 720 is scanning power lines. Users can capture the poles vertically, front and back. The extreme range of this system means it can be integrated with UAVs, airplanes or helicopters.
In addition to the two sensor payloads, GeoCue has launched its LP360 software add-on for processing and visualization — the 3D Accuracy and the Accuracy Star hardware.
Accuracy Star. (Image: GeoCue)
“When used together, Accuracy Star and the 3D Accuracy add-on provide automated horizontal and vertical checks,” said Darrick Wagg, vice president of customer success for GeoCue. “You can automatically find a 3D target on a drone dataset. The software will calculate the correction for any 3D target and provide a seamless workflow to apply the correction on the point cloud.”
These products are suitable for geospatial professionals.
Paris Austin, head of product – New Technology for OxTS, tries out the new backpack at historic Minster Lovell Hall. (Image: OxTS)
More than 400,000 sites in the United Kingdom are on its historical registries. English Heritage site Minster Lovell Hall is located in Oxfordshire, also the home county of inertial navigation company OxTS. The picturesque ruins of Minster Lovell Hall, a 15th-century manor house, include the hall, a tower and a nearby dovecote.
The hall was built in the 1430s by William, Baron of Lovell and Holand — one of the richest men in England. It was later home to Francis, Viscount Lovell, a close ally of Richard III. After changing hands several times, the hall was abandoned and eventually demolished in the 18th century, leaving the extensive remains that stand today.
(Image: OxTS)
The buildings are grouped around a central courtyard in a plan characteristic of a late medieval manor house. For OxTS, the site proved suitable for testing its prototype backpack. The site features dense tree canopies on one side, tight doorways, narrow views of the sky, and plenty of height to test the angled mounting of the survey-focused lidar for when GNSS is denied. Open-sky areas allowed the OxTS team to return to real-time kinematic (RTK) surveying before moving on to another section of the site.
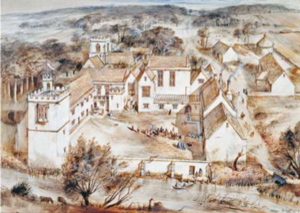
Reconstruction drawing of Minster Lovell Hall as it might have appeared in the 15th century, by artist Alan Sorrell. (Image: English Heritage)
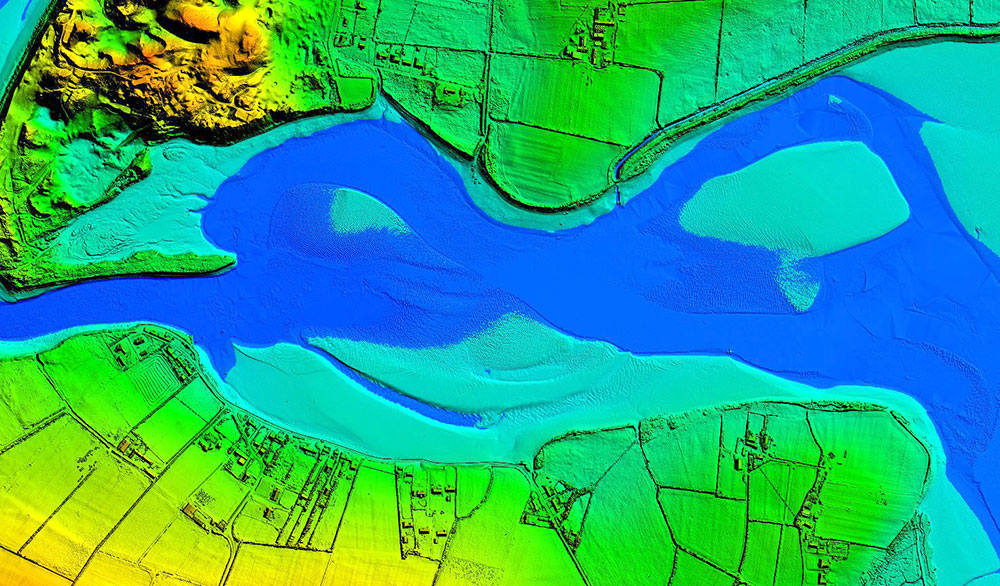
The prototype backpack is based on the OxTS setup for vehicles but was created to enable quick data collection without a car. It is equipped with two Hesai lidar sensors, a new OxTS prototype inertial navigation system and an antenna. The team can connect it to a laptop for configuration and to optimize lever arms and the boresight. Once post-processed with OxTS Georeferencer software, the point cloud below was produced.
OxTS designed the backpack to meet a growing need for localization and georeferencing in both GNSS-denied areas and those that cannot be reached by car, including the construction, environmental, conservation and heritage industries.
A roundup of recent products in the GNSS and inertial positioning industry from the August 2022 issue of GPS World magazine.
OEM
Receiver Module
Designed for autonomous applications
Photo: Trimble
The Trimble BD9250 dual-frequency receiver module supports Trimble RTX correction services and is designed to deliver high-accuracy positioning for high-volume, autonomous-ready applications in agriculture, construction, robotics and logistics. The compact receiver has an industry-standard form factor and pinout, allowing for easy system integration and configuration. Equipped with Trimble’s advanced ProPoint positioning engine, the BD9250 delivers robust and accurate positioning. It is compatible with Trimble RTX correction services or real-time kinematic (RTK) and supports GPS, Galileo, GLONASS and BeiDou as well as QZSS and NavIC. Support for the Indian NavIC S-Band signal is also available.
The AsteRx-U3 ruggedized GNSS receiver is the successor to the AsteRx-U for construction, mining and other machine control applications. It combines a triple-band precise positioning GNSS core with extended wireless communication features including Wi-Fi, UHF and 4G LTE, making it easy to fit it into any control system. The AsteRx-U3 offers low latency of under 10 msec with a high data rate, which allows machines to work rapidly and accurately. An IP68-rated housing, with fixing brackets and robust M12 connectors, enables quick installation.
The M20071 integrated GNSS receiver module, measuring 9 x 9 x 1.8 mm, incorporates the MediaTek AG3335MN flash chip. The receiver tracks four GNSS constellations concurrently (GPS + Galileo + GLONASS + BeiDou). The 1.8-volt system power supply provides outstanding low power consumption. Its multipath algorithms improve position accuracy in inner-city environments. The onboard low noise amplifier provides good performance in weak signal environments such as wearable devices.
The Strategic Anti-jam Beamforming Receiver – M-Code (SABR-M) enables precise geolocation and strike capabilities in highly contested battlespaces. It integrates receiver technology with advanced antenna electronics in a small, hardened package designed to meet challenging performance requirements. It delivers accurate position, velocity, altitude and timing data, as well as strong protection against GPS signal jamming and spoofing. At 4.5 x 6 x 1 inches, the SABR-M meets size, weight, power, cost (SWaP-C) and thermal requirements for space-constrained military applications. It uses advanced beamforming technology to improve GPS signal reception and counter threat signals.
The GPS Resilient Kit (GRK) is a cybersecurity device that comes with two antennas for monitoring and protecting time-critical infrastructures. It can be integrated with any GNSS receiver, either as a retrofit or in greenfield deployment. The GRK features a proprietary interference filtering algorithm for maximum protection, up to 40-dB attenuation of jamming signals with the premium option. It requires minimal power consumption while providing cloud-based monitoring with real-time reporting of jamming attacks. It protects GPS L1 (C/A code) with a latency of 100 ns ±15 ns (fixed).
GBaaS enables providers to combat PNT cyberattacks
Photo: ADVA
GNSS-backup-as-a-service (GBaaS) enables service providers to help operators safeguard services that rely on positioning, navigation and timing (PNT). In-network timing based on network time protocols (NTP) and precision time protocols (PTP) are also increasingly vulnerable to cyber threats. GBaas is based on ADVA’s aPNT+ platform, which leverages a suite of technologies, including multi-band GNSS receivers and management software based on artificial intelligence and machine-learning. Service providers can offer ADVA’s aPNT+ protection as a subscription-based service as part of their service-level agreements.
The i73+ pocket-sized receiver is a powerful and versatile receiver with an integrated UHF modem that delivers survey-grade accuracy in all jobsite configurations. It has 624 GNSS channels and the latest iStar technology and can be operated as either a base station or a rover. The i73+ is a highly productive NTRIP rover when used with a handheld controller or tablet and connected to a GNSS RTK network via CHCNAV LandStar field software. The receiver takes advantage of GPS, GLONASS, Galileo and BeiDou, in particular the latest BeiDou 3 signal, to provide robust data quality at all times.
The Geode GNS3 GNSS receiver allows users to collect real-time GNSS data with sub-meter, sub-foot and decimeter accuracy options. With a scalable accuracy platform, users can purchase what they need now, while having the option to increase accuracy in the future. It offers sub-meter accuracy with a single-frequency antenna, while its multi-frequency antenna supports all constellations on L1, L2 and L5. Atlas L-band corrections allow the Geode to be used in water utility locating, agriculture and irrigation mapping, as well as mapping projects in remote locations where other correction services are not available. The Geode GNS3 can be used with Windows, Android, iPhone and iPad devices.
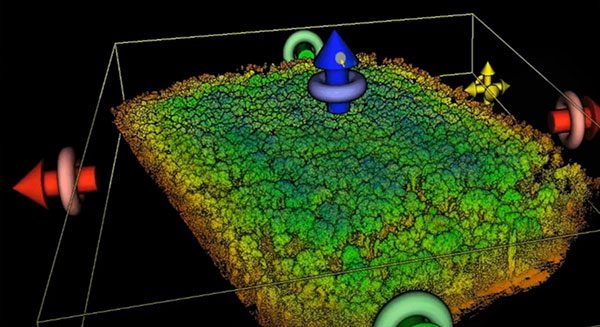
Improved colorization to contextualize point clouds
Photo: GeoSLAM
The ZEB Vision is a camera accessory for the ZEB Horizon system that can be used to capture 360° panoramic photography in 4K definition for point cloud colorization. Data is captured as the user walks through the area of interest. The ZEB Vision uses GeoSLAM’s SLAM algorithm to automatically and accurately position panoramic photos on a point cloud for an interactive viewing experience. The ZEB Vision attaches easily to the ZEB Horizon. The 4K resolution increases feature definition of objects within the point cloud, allowing for a new perspective on data by navigating within a virtual representation of an environment. This means industries such as architecture, construction and facilities can add real-world context to point clouds for the creation of CAD/BIM models.
The Leica Chiroptera-5 is a high-performance airborne bathymetric lidar sensor for coastal and inland water surveys. It combines airborne bathymetric and topographic lidar sensors with a four-band camera to collect seamless data from the seabed to land. Compared to previous models, the Chiroptera-5 provides 40% higher point density, a 20% increase in water-depth penetration, and improved topographic sensitivity for generating more detailed hydrographic maps. Its high-resolution lidar data supports nautical charting, coastal infrastructure planning, environmental monitoring and landslide and erosion risk assessments.
The Clirio application combines mobile lidar 3D scanning with smart remote collaboration tools to offer teams an end-to-end 3D solution to capture, organize, share and problem-solve. This is all based on real-time field observations and data, whether team members are on site or a continent away. Clirio is a set of mobile, web and VR/AR apps for instantly capturing, sharing, reviewing and resolving worksite field observations. At a field site, Clirio users collect notes, photos and 3D scans (using the laser scanner built into a new iPad Pro or iPhone Pro). These field observations are automatically geo-referenced within the map-based workspace and synced to a secure cloud workspace. An intuitive interface allows colleagues, managers, partners, or stakeholders to sort, review, compare, and act on field observations.
The Visual Parking System (VPS) by Bird is designed to keep track of scooter parking in a scalable, efficient and vandalism-immune way that requires zero infrastructure within a community. Powered by Google’s ARCore Geospatial API, VPS enables scooter parking with pinpoint accuracy. When parking a scooter, riders will be prompted to take a quick scan of their surroundings. The system seamlessly compares a rider’s images against Google’s data and Street View images in real time to produce the best available parking solution. Stationary objects such as buildings and signs are used as reference points, while more dynamic objects such as people and vehicles are disregarded. The near-instantaneous process results in a precise, centimeter-level geolocation that enables Bird VPS to detect and prevent improper parking with extreme accuracy, helping ensure Bird vehicles are only left in approved areas.
Supports Industry 4.0 with real-time visibility of assets
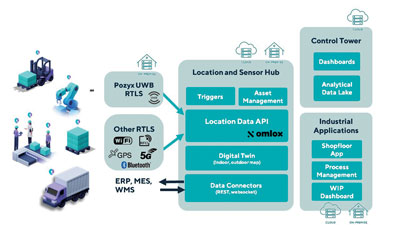
Photo: Pozyx
The Pozyx Platform is an asset tracking and identification solution for seamless indoor and outdoor tracking, following packages or other assets from trucks to their destination. It is based on the omlox hub, an open standard for real-time location systems that combines GPS data with data from ultra-wideband, 5G, radio-frequency identification, Wi-Fi and Bluetooth. The Pozyx Platform offers a seamless indoor/outdoor transition with zoom-in from a worldwide map to a detailed indoor map, showing highly accurate locations up to 10 cm. It is designed for smart manufacturing, providing a supply-chain solution that supports Industry 4.0. It tracks and identifies any asset, providing real-time data to facilitate warehouse and inventory control, keep track of critical tools, and slash lost asset costs.
OxTS Georeferencer 2.0 is now available, introducing several key improvements, particularly for professional lidar surveyors.
Version 1, introduced almost two years ago, has since been upgraded with integration of 30 new lidar sensors, as well as providing multiple user-experience enhancements.
Surveyors can use Georeferenceer alongside any OxTS inertial navigation system (INS) to quickly and easily georeference lidar data from multiple sensors to create precise 3D point clouds.
Version 2.0 highlights
Global coordinates. OxTS Georeferencer 2.0 users can now process data in a range of coordinate systems. These include local coordinates, ECEF and LLA (latitude, longitude and altitude).
New processing options. Users can maximize the usability of their point clouds and minimize data size through a range of processing options, including:
filter points by position uncertainty keeping every point within a specified accuracy
maximize the accuracy of the data while minimizing data size with a Voxel sampling algorithm
filter points by intensity, azimuth and elevation angle of the lidar
ilter points by speed and range from a vehicle.
Improvements in map file creation. OxTS Georeferencer 2.0 can add the direction from which each point is surveyed into the point cloud, allowing mesh surfaces to be easily reconstructed.
Furthermore, OxTS Georeferencer 2.0 gives surveyors the ability to add point-normal information into the point cloud and view the vehicle trajectory as a point cloud.
Processing advances. Users benefit from better performance due to revisions of the OxTS Georeferencer processing algorithms. With version 2.0, users can process point clouds faster than before and take advantage of improved precision and consistency of the boresight calibration feature, which now utilizes target dimensions.
In this issue’s cover, a man with a backpack lidar unit, a GNSS receiver and a tablet computer is surveying in a complex and challenging urban setting. That same lidar unit also can be mounted on a UAV. One of the contributors to this month’s cover story describes the role of aerial photogrammetry in the architecture, engineering and construction (AEC) industry. Satellite navigation, remote sensing, mapping software, a great variety of platforms, and ever more powerful handheld computers — those are the key ingredients in today’s ecosystem of geospatial technologies. The current generation of surveying equipment has more than halved fieldwork in the past two decades while greatly improving the quality of the data collected.
The AEC industry relies on surveyors to be “a bridge between the existing landscape and the design landscape,” said another contributor to our cover story. Unlike traditional boundary surveying, he explained, surveying for AEC requires consideration of a detailed 3D world. It also involves many more stakeholders and much greater liability.
The tight integration of GNSS, inertial systems, lidar sensors and 360° spherical imagery into mobile mapping systems makes 3D modeling possible and traditional GNSS or optical measurement instruments obsolete. However, while inertial systems are invaluable to bridge brief gaps in the availability and reliability of GNSS signals, they are far from the panacea they are sometimes claimed to be, as Brad Parkinson reminds us in an interview with Dana Goward, also in this issue.
Surveying for AEC requires at least centimeter accuracy. The challenges of surveying in urban settings include urban canyons that occult signals and create multipath, traffic and multiple layers of underground, ground-level and above-ground infrastructure.
Beyond the construction phase, 3D survey data is increasingly used to create digital twins of buildings, which facilitate their operation and maintenance throughout their life cycle and help lower their carbon footprint. Once they have completed an initial survey, surveyors often set control to be used for machine control — the theme of our cover story in next month’s issue.
In this issue we also:
• Inaugurate a “letters to the editor” section to make more room for debate in the GNSS/PNT community on the critical issues it faces.
• Report on a Jet Propulsion Laboratory study of the impact on the ionosphere of the enormous volcanic eruption in Tonga and the beginnings of a GNSS-based early warning system for natural hazards.
• Continue our series of articles on GNSS constellations, with an update from Japan’s QZSS constellation.
• Feature three studies: one on real-time simulator testing using an NMEA data stream, one on the first transmission of L1C/B signals by QZSS, and one on self-driving cars in major metropolitan areas.
All these advances, however, are threatened when GPS is threatened. Earlier in the month, three members of our editorial advisory board comment on the recent threat to GPS satellites by the Russian government.
Seoul Robotics has launched Voyage, a plug-and-play lidar perception system. The all-in-one deployment kit is equipped with the company’s proprietary software SENSR2, lidar sensors and a computer.
Seoul Robotics is a 3D computer vision company using artificial intelligence (AI) and machine learning for intelligent robotic perception systems. The company’s sensor-agnostic perception software is deployed by BMW, Mercedes-Benz, the Chattanooga Department of Transportation and Emart, among others.
Seoul Robotics provides companies, institutions and governments with the software behind the sensor that enables its use in markets such as retail, smart cities and security. Voyage is designed to help organizations and communities increase efficiencies and improve safety through a cost-effective, customizable system.
The lidar market, which is on track to reach more than $3 billion by 2025, has become crowded over the past several years as the technology became synonymous with autonomous vehicles. The marketplace is flooded with companies producing sensors to fuel the demand of this industry, but most sensors on the market are sold without any intelligence, leaving companies to develop software in-house, which significantly increases the time and cost of deployment.
With Voyage, organizations are not obligated to purchase a particular sensor if it is not a fit for the solution they are deploying. Customers don’t have to worry about changing software when they change or upgrade their sensors — Voyage is a non-proprietary solution that breaks down the barriers to entry and allows for quick access to 3D vision, according to Seoul Robotics.
“First and foremost, lidar sensors do not work without sophisticated perception software. The lidar industry is investing billions of dollars on sensors without even considering the software needed to interpret the data into actionable solutions,” said HanBin Lee, CEO of Seoul Robotics. “Voyage combines analytics and sensors to bring tangible solutions to market much faster.”
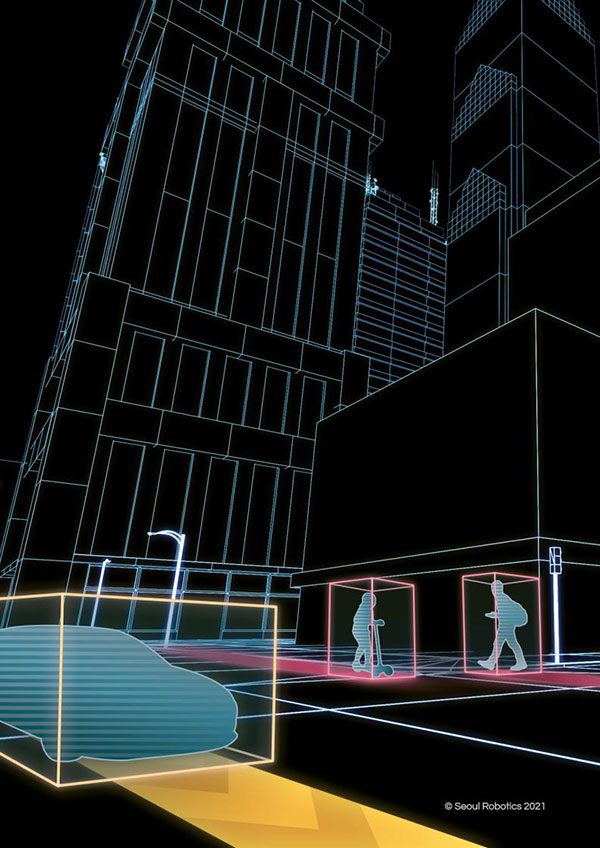
Voyage provides highly accurate object detection, tracking and classification capabilities to enable a wide range of applications for smart cities, intelligent transportation systems, retail analytics, crowd monitoring and security. It fuses three cutting-edge technologies:
3D lidar sensing powered by Seoul Robotics’ proprietary software SENSR2
Edge computing for minimum data burden and ease of integration
Built-in sophisticated perception software for instantaneous analytics
Voyage provides centimeter-accurate 3D object detection, tracking, and classification in addition to volumetric profiling and motion prediction capabilities, regardless of lighting conditions, and can collect and process data from up to four sensors for seamless insights across the sensor coverage zones. As Voyage does not capture, show or store any biometric and otherwise identifying data, it aims to maximize the protection of people’s privacy when installed as part of various smart cities and security systems.
Oxford Technical Solutions (OxTS) has launched the latest version of its lidar georeferencing software, OxTS Georeferencer 1.4.
OxTS is taking steps to improve surveyor’s user experience, streamline survey processes, and allow surveyors to get to work faster, while simultaneously improving results.
OxTS Georeferencer fuses position, navigation and timing (PNT) data from an OxTS inertial navigation system (INS) with raw lidar data to output highly accurate 3D point clouds. The software uniquely makes use of navigation diagnostic data that provides surveyors with lidar point-error estimation. This error estimation allows surveyors to focus their analysis on viewing parts of their survey based on estimated errors in points, helping them understand if there are any parts of a survey that need to be looked at again.
Rather than relying on surveyors to integrate their chosen lidar sensors themselves, OxTS has pre-integrated a number of sensors natively. Previous versions of OxTS Georeferencer integrated widely used sensors from Velodyne, Ouster and Hesai. The pre-existing integrations allow surveyors to focus on surveying rather than ensuring the two datasets work in tandem.
Version 1.4 of OxTS Georeferencer integrates new lidar sensors from Hesai. A previous version released in November 2020 was the first integration of the Pandar40P Hesai lidar. Now, seven new Hesai sensors are being integrated:
Pandar40 (beta)
Pandar40M (beta)
Pandar64 (beta)
PandarQT (beta)
Pandar128 (beta)
PandarXT-16 (beta)
PandarXT-32 (tested)
OxTS Georeferencer 1.4 also features several new developments to enhance the user experience and make it more intuitive.
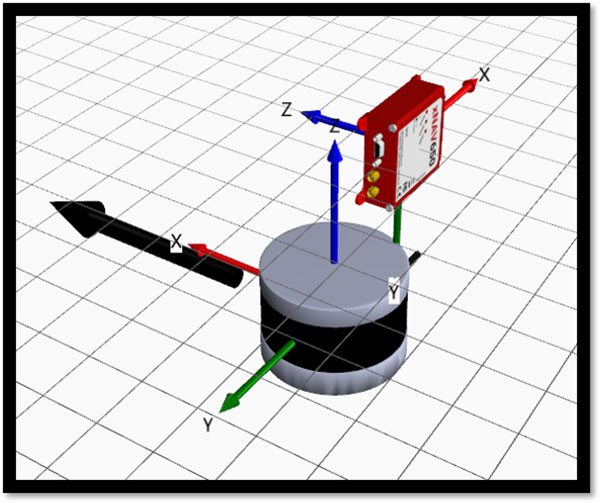
3D Hardware Setup Viewer. To help input the correct relative rotation angles, specific lidar models will be available to view depending on the surveyor’s choice of lidar. The model will represent the lidar sensor in appearance, size and orientation within OxTS Georeferencer with respect to the OxTS INS for quick and intuitive configuration.
The OxTS Georeferencer Hardware setup viewer shows the OxTS xNAV650 INS alongside a Hesai lidar sensor. (Image: OxTS)
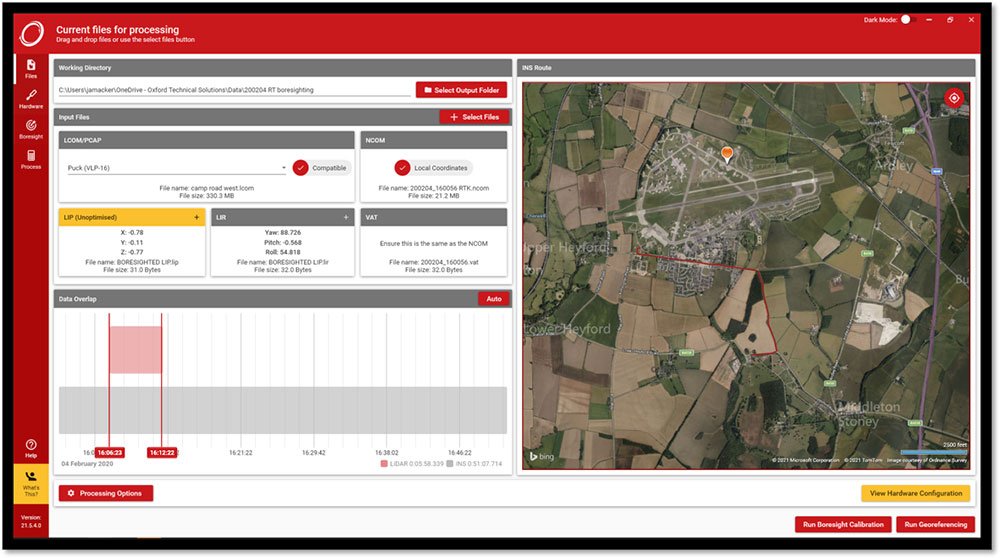
Time overlap chart. Georeferencer 1.4 reintroduces a time overlap chart that allows surveyors to visualize their survey route on a map and select specific start and end times. This enables surveyors to control the part of the route they would like to view, with the added ability to georeference only that section of the survey.
The OxTS Georeferencer time overlap chart. (Image: OxTS)
Lidar CAD models will make it easier for surveyors to calculate and input accurate LIR angles into OxTS Georeferencer, further streamlining the survey process.
The time overlap function will provide surveyors with even more flexibility — this time after the survey. Giving surveyors the ability to choose the start and end times of their survey, and therefore which part of the survey to georeference, enables full control of what to present to their peers.
These new features, coupled with those already present in OxTS Georeferencer (optional boresight calibration and point uncertainty analysis) give surveyors the flexibility and control they need to produce the best possible lidar surveys.
First commercial deployment to be installed on a major turnpike used by tens of millions of vehicles every year
An electronic tolling system that uses high-performance lidar sensors from Cepton and a vehicle identification solution from Red Fox ID is expected to be deployed on a major highway turnpike crossing multiple states in the United States.
The turnpike project is expected to provide fast, accurate, real-time tolling to enable smooth traffic flows. Specifics of the project — including states involved and the timeframe of installation — were not disclosed.
Photo: Cepton
Based on an extended collaboration with leading lidar solution provider Cepton, Red Fox ID — a designer and developer of vehicle identification and classification solutions — has developed a multi-lane, free-flow tolling system called Quantum, which is able to accurately detect, track and classify vehicles of any size or type at highway speeds.
Quantum uses Cepton’s Micro Motion Technology (MMT)-based Sora-P60 or Sora-P90 lidar sensors for high-resolution vehicle profiling, to enable integrators and road operators to achieve highly accurate customer billing in real time, with free flow, barrier-free tolling.
For tolls to be charged correctly based on vehicle class, traditional tolling systems often use tollbooths for manual processing or depend on vehicle speed-reduction infrastructure to allow for time to capture vehicle information. That can cause congestion, increased emissions and frustration among customers.
Advanced systems that aim to enable faster tolling are often subject to significant errors, such as missed vehicles or wrong vehicle classification, because of limitations of the sensors being used, such as cameras and weight-based ground sensors. Vehicle-classification errors can have significant operating cost consequences for tolling operators, while leakage leads to lower revenues. With tollways processing tens of millions of vehicles a year, the cumulative impact of inaccuracies and errors creates significant administrative costs, losses and customer dissatisfaction.
Red Fox ID’s Quantum solution adds an extra layer of accuracy to the tolling system by integrating Cepton’s lidar technology. A gantry-mounted system using Quantum is able to accurately detect and track vehicles even as they switch lanes. Quantum captures and extracts high-quality information, such as vehicle velocity, size and class. All of that information is used as input to a separate billing system to compute and apply the appropriate tolling charge.
Quantum can also direct camera-based systems on the gantry to capture a vehicle’s front and rear plates in the event that a transponder cannot be detected. Through these innovations, Quantum has demonstrated a vehicle-detection accuracy in all traffic conditions of 99.96%, an axle-classification accuracy in all traffic conditions of 99.9% and a vehicle-length accuracy of +/-5%. The system uses Cepton’s Sora-P sensor family which has been tested and proven during extended trials, including in various weather and light conditions.
The recently released Sora-P90 lidar features a 380-Hz frame rate to deliver 1140 line scans per second, providing high-fidelity profiling of vehicles passing at highway speeds. Powered by Cepton’s patented, rotation-free, frictionless and mirrorless MMT, the Sora-P90 is rugged, reliable and scalable, making it suited for automated tolling applications.With a 90° horizontal field of view, the lidar can be set up using one gantry instead of two separate sensors and gantries, making overall deployment more cost effective.
Red Fox ID has been working with Cepton on multiple trials and proof of concept projects across the globe since 2019. This has allowed both partners to expand the application of advanced lidar intelligence for high-accuracy tolling on highways and roadways in a growing list of countries, across North America, Europe, the Middle Eas, Africa and Asia.
“Our industry’s drive for overhead tolling solutions has failed to materialize in the mainstream due, primarily, to a lack of sensors capable of achieving the high levels of accuracy required for a modern tolling product,” said Steve Bird, CEO of Red Fox ID. “The technical innovations enabled by Cepton offer us new design options. Improvements in the resolution of the data, the ability to deal with the full range of weather-related conditions, and the development of a sensor with an in-service lifespan suitable for tolling make it possible, for the first time, for us to develop an accurate, overhead free flow system. Our partnership with Cepton will be a game-changer in revolutionizing the tolling market.”
“It is very clear that lidar’s uses extend far beyond just serving as the ‘eyes’ of autonomous vehicles,” said Jun Pei, CEO of Cepton. “Our lidar technology has a huge part to play in making our transport infrastructure smarter, safer, greener and more efficient, as we can see here following Quantum’s highly successful real-world testing. The key to success for toll operators and providers is minimal error and maximum yield, and we are excited to be partnering with Red Fox ID to help our mutual customers achieve this goal with our market-leading lidar technology. We look forward to working with them to expand our partnership worldwide.”
Dundrum Bay on the coast of Northern Ireland is captured by a mapping airplane in a project to document climate change effects. (Photo: DAERA/Bluesky)
Bluesky International will use aircraft-mounted lidar sensors and laser scanners to create a highly detailed 3D map of the whole of the Northern Ireland coastline.
Working on behalf of the Department of Agriculture, Environment and Rural Affairs (DAERA), the lidar survey will be used to create the first complete baseline. The baseline will underpin recording of coastal change and help identify the rate at which the coastline is changing as a result of climate change.
In addition to the lidar data Bluesky will simultaneously capture high detailed aerial photography which will be processed to produce to a fully orthorectified, 10-centimeter-resolution database.
The Bluesky data will form part of the wider Northern Ireland 3-dimensional coastal survey. The survey will extending into the marine environment with a satellite-derived bathymetric survey and a pilot bathymetric lidar survey. Together, the surveys will inform the development of future coastal management policies.
“The Northern Ireland coast is a hugely valuable resource which is currently facing increasing pressure from climate change,” said Joanne Hanna, senior scientific officer within the Marine and Fisheries Division of DAERA. “Sea-level rise, in combination with an increase in extreme storm events, is resulting in greater energy impacting our coastlines, altering coastal processes and accelerating change.
“Despite the importance and the value of this coastline, the nature and scale of the issues arising from coastal change and sea-level rise are currently not known and there is limited and insufficient baseline data available,” Hanna said. “The coastal lidar survey carried out by Bluesky will provide scientifically robust baseline data which will enable decision makers and coastal managers to make informed decisions and devise solutions and appropriate management to the problems currently facing our coastline.”
Bluesky will undertake the specialist survey using a fixed wing manned aircraft and will fly the 763 kilometres of Northern Ireland coastline capturing height measurements of both the underlying terrain and any surface features at a resolution of better than 16 points per metre. This data will be used to create highly accurate 3D digital terrain and surface models (DTM, DSM) with a spacing of up 25 centimetres.
The Bluesky datasets will be supplied ready for use in a range of geographical information system (GIS), desktop mapping and other specialist software packages and will be compatible with other DAERA datasets including Ordnance Survey mapping.
The OxTS Georeferencer combines INS and point-cloud data from third-party lidar sensors. (Image: OxTS)
OxTS is offering its new OxTS Georeferencer, a powerful lidar georeferencing software tool. OxTS Georeferencer combines OxTS inertial navigation data with raw lidar data to give surveyors the ability to create georeferenced point clouds along with tools to calibrate their setup and analyze the accuracy of their surveys.
Users can now combine data from their OxTS inertial navigation system (INS) with a much broader range of lidar sensors. The OxTS Georeferencer works with pointclouds from Hesai, Ouster and Velodyne lidar sensors. New sensors brought to market can be quickly and easily added to OxTS Georeferencer.
This release ensures that surveyors can easily and confidently use OxTS Inertial Navigation Systems and OxTS Georeferencer, to produce georeferenced point clouds irrespective of the LiDAR scanner they prefer to use.
The OxTS Georeferencer gives surveyors flexibility in terms of the hardware they may use to survey their environment.
Users can combine OxTS INS data with data from the following models:
Velodyne. VLP-16 Puck, Puck LITE (beta), VLP-32C (beta) and Alpha Prime VLS128 (beta). The Velodyne VLP-32C sensor is single-return mode only.
Hesai. Pandar40P
Ouster. All Ouster Gen2 lidar, The OS1 and OS2 lidar with 32, 64 and 128 lasers (all Ouster integrations, other than the OS1-64 in uniform laser distribution, are in beta.)
Features of this release include:
Improved calibration. Take advantage of a broader range of set-ups without extensive planning and set-up costs. A data-driven calibration technique helps to get the best results from your set-up. It eliminates blurring and double-vision, especially at longer distances. The new version now can calibrate angles AND linear displacements. Please note that LIP calibration is in beta.
Error estimation. Gain more control over your point-cloud. The new pointcloud error estimation uses a sophisticated formula together with OxTS navigation data diagnostics. These are then used to estimate the centimetre uncertainty in point positions. Users can then choose a maximum uncertainty to be included or remove inaccurate points.
Dual return. Provide customers with enhanced point-cloud images. The new version of OxTS Georeferencer includes dual return capability for nearly all supported models. Where available, this will give point clouds much higher definition. Users can then present enhanced point-cloud images to customers and internal stakeholders as well as service specific applications.
Easily integration of new lidar families. This latest version of OxTS Georeferencer supports the future proofing of other new LiDAR sensors. It allows users to quickly and simply add new LiDAR families to the framework. If there are any LiDAR sensors NOT currently integrated that you want to see, contact OxTS and they will consider them.
For more information on OxTS Georeferencer or to arrange a demonstration, contact OxTS – OxTS Georeferencer.