Topcon Positioning Systems has signed a commercial agreement with Xona to secure early-adopter access to Pulsar, Xona’s low Earth orbit (LEO) satellite navigation constellation. This agreement positions Topcon among Xona’s first commercial customers preparing to integrate Pulsar into future high-precision positioning workflows.
“The letter of agreement reinforces Topcon’s long-standing commitment to innovation and customer-driven technology leadership,” said Ron Oberlander, head of the Topcon Geomatics Platform. “It lays the groundwork for a new era of high-precision performance possibilities as LEO satellites come online. By proactively adopting next-generation navigation infrastructure, we strengthen our commitment to provide reliable, resilient, and future-proof solutions for our customers.”
“Topcon understands where accuracy, continuity and confidence matter most for operators in the field,” said Bryan Chan, co-founder and VP of Strategy at Xona. “By adding a modern navigation layer into Topcon’s offerings, Pulsar will strengthen signal performance and resiliency in even the most challenging environments, ensuring Topcon customers can operate with greater confidence wherever their work takes them.”
Today’s commercial innovation requires infrastructure that moves at the same pace.
Essence
The rise of commercial satnav
Everyday life is saturated with location-dependent devices. They are multiplying faster than ever and their requirements have surpassed what GPS can support. Innovation in low-Earth orbit (LEO) satellites have seen exponential growth in the last ten years, unlocking new possibilities in further connecting our world.
In 2016, the total number of satellites operational in space from commercial and government operators was approximately 1,500. This number had been stable for decades, with linear growth since the launch of Sputnik in 1957. Today, there are now more than 8,000 satellites operational in space — with nearly all growth happening in LEO.
There are multiple reasons why. The cost of space access has decreased with reusable rockets and greater competition. The demand for connectivity has driven deployment of multiple constellations to deliver Internet from space. Latency is extremely important in communications and resolution in Earth observation.
While innovation in LEO satellites has primarily focused on connectivity and Earth observation, there is a generational opportunity to innovate in the position, navigation and timing (PNT) infrastructure that silently powers modern life.
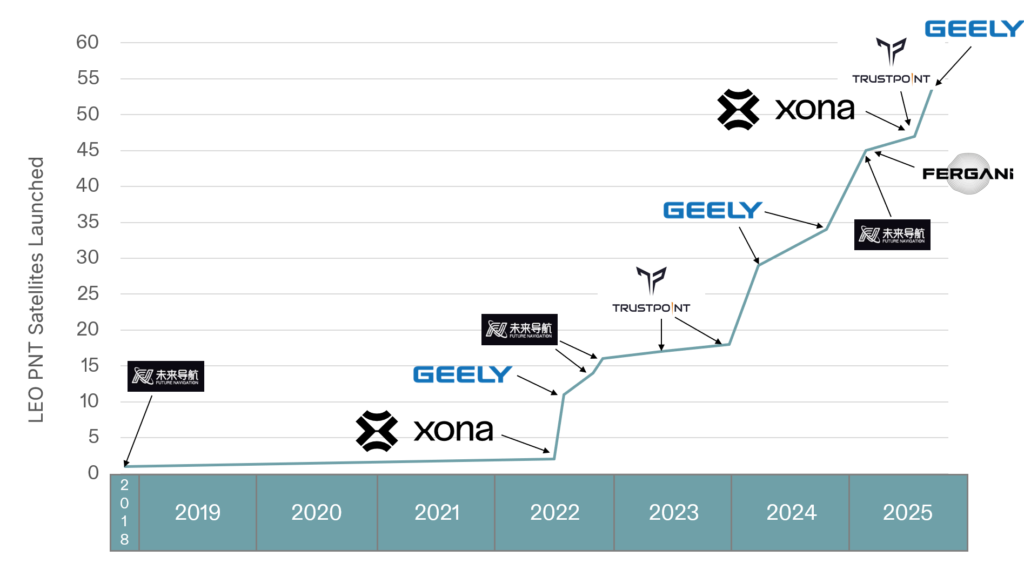
There are now more than ten entities working toward deployment of dedicated PNT functions in LEO, amounting to more than 2,500 satellites if every constellation was complete today. As shown in Figure 1, five of these entities have already collectively launched more than 50 satellites. This market signal is not surprising, as demand for greater precision, power and protection are becoming fulfilled with diversification in LEO.
Figure 1. Launches of LEO PNT satellites.
Essentials
Medium-Earth orbit (MEO) has been the traditional choice of satellite navigation for global systems, with GPS, Galileo, BeiDou and GLONASS all being deployed in this regime. This altitude in the outer Van Allen belts is the harshest radiation environment Earth orbit satellites are subjected to and is a major driver in the cost and complexity of the satellites. From a commercial standpoint, deployment in LEO is more attractive as the more benign radiation environment allows for the use of more commercial off-the-shelf (COTS) parts in satellite designs, facilitating volume production. With a healthy ecosystem and supply chain now developed around LEO for both satellites and launch vehicles, the opportunity for commercial PNT to set a new standard in performance and protection is open.
The time for innovation in PNT could not be more urgent. Innovators are pushing the frontiers of technology across every industry and market. Physical intelligence is proliferating in the form of self-driving cars, humanoid robotics, automated farming, unmanned aerial systems and more. As these systems begin to coexist in the real world, the tools they rely on have never been more at risk. Commercial aviation is regularly jammed in Europe and the Middle East due to ongoing conflicts. And ships at sea are struggling to adapt to an environment where spoofing is commonplace.
The commercial world has different and increasingly more stringent requirements than government-focused systems like GPS. GPS was designed primarily around military requirements and is longstanding infrastructure that is difficult to change with the myriad number of deployed devices that depend on it. This responsibility makes GPS too big to fail, but also incredibly difficult to change.
GNSS infrastructure has unlocked so much in commercial activity. There are now more devices using GNSS than the Internet, and GPS is by far the majority user of the technology (based on nearly 7 billion active GNSS devices on Earth and around 6 billion users of the Internet.) However, commercial users have limited input to the evolution of GNSS constellations, which has led to a widening gap between technology and wants, which provides for the current commercial opportunity.
Simply put, today’s commercial innovation requires commercial infrastructure that moves at the same pace to support.
Elements
Architecting LEO PNT
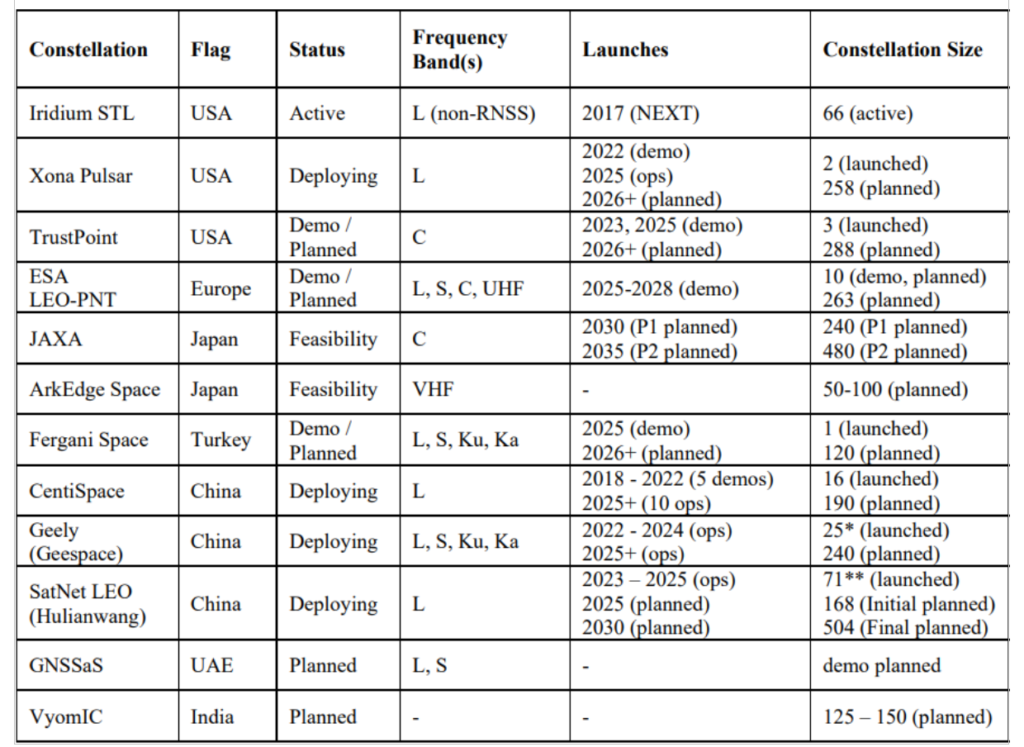
For a LEO satellite navigation system, many designs could be considered, as reflected in Table 1 from Reid et al. (2025) outlining current public information about systems already announced. These constellations range from government-supported systems, which could act as extensions of already deployed global or regional systems, to commercial systems that target potentially unique, independent markets.
Table 1. Comparison of dedicated LEO PNT systems, deployments, and plans. Note that satellites already deployed were verified on celestrack.org .
These constellations all have one thing in common: they aim for between 200 and 300 LEO satellites. The reason is simple: as LEO satellites have a footprint of approximately 1/10th that of medium Earth orbit (MEO) satellites, and between 20 and 30 MEOs are required for global PNT, approximately 10x more LEOs are needed to obtain similar coverage. A consequence is that in LEO, the radio energy is spread over 1/10th the area compared to MEO, which has implications for power needs at the satellite — 10x less in LEO for the same MEO power in the same band.
There is another crucial parameter to consider in LEO PNT design: spectrum. Table 1 shows that many approaches are being considered. Xona’s approach with its Pulsar constellation was centered around three major areas of commercial appeal: seamless operation with existing devices; increased native accuracy; and added resilience to jamming and spoofing. An important philosophy adopted early in the company’s culture was to not make development a science project — that is, do not reinvent the wheel, but rather upgrade the engine. GPS was a revolutionary technology, which is why it is so heavily adopted and brings so much value to the world. Therefore, stand on the shoulders of this giant to look out to the future.
Ease of integration was the first consideration, as it has been the most important aspect in accelerating adoption of any new system. And spectrum is key to Integration. By launching a new system that uses the existing L-band signals, the GNSS ecosystem producing approximately one billion new units per year can seamlessly upgrade their capability without new hardware. Xona’s first technology pathfinder satellite in 2022 validated this hypothesis. While the pathfinder mission supported two satellite frequencies already in the regional navigation satellite system (RNSS) bands — one near L-band E6 and the other in the yet unused C-band near 5 GHz — it became apparent that receiver companies were willing to develop hardware for the L-band signal, and did so quickly with their existing hardware. There was resistance and longer timelines to global adoption for C-band signals.
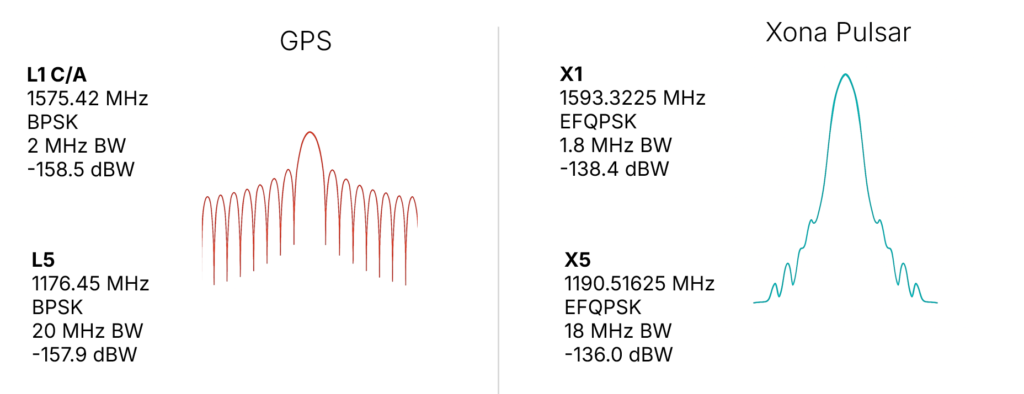
In response, Xona shifted the production signals to a dual L-band system, which already has nearly a dozen commercial receiver partners tracking the recently launched production satellite — some within weeks of the launch. The challenge is to choose a waveform that is near existing GNSS bands, familiar in form and function and digital signal processing techniques to what is already fielded today, and to not cause harmful interference to the existing GNSS services in orbit. The resulting design is shown in Figure 2, on the right. The key innovation was the selection of a bandwidth efficient form of quadrature phase shift keying (QPSK), which focuses the energy in the central lobe and rolls off quickly compared to a traditional binary phase shift keying (BPSK) signal, shown in Figure 2 on the left for comparison. The result is a 100x stronger signal that does not cause harmful interference to existing GNSS signals, while offering resilience through more signal power. This selection process was iterative, taking feedback from the receiver community. More information on the design and testing for compatibility can be found in Reid et al. (2025).
Figure 2. (Left) GPS BPSK-based signal waveform, and (right) Pulsar QPSK-based signal waveform.
In addition to compatibility and ease of integration, accuracy and resilience are critical design drivers. For example, farmers rely on their equipment positional accuracy to efficiently distribute seeds, fertilizer and water, reducing waste and improving crop yields. Positional accuracy also enables accurate, repeatable field operations year after year, saving time, fuel and money while protecting the soil. Because GNSS typically offers meter-level positioning, today many farmers buy positional accuracy through GNSS correction services to obtain centimeter-level positioning. The Xona architecture leverages these techniques in precise point positioning (PPP), delivering precise ephemerides direct from the space segment, and combining them with the fast motion from LEO satellites (compared to MEOs) to reduce position solution convergence times from ~10 minutes to nearly instantaneous (see, for example, Mah and O’Keefe, 2025). This geometry also boosts coverage, as correction services today typically rely on geostationary satellites and do not service high latitudes, where they would benefit missions such as mining operations for critical minerals and polar navigation.
Connectivity relies on resilient timing. Passing more data through a network means efficiently meshing data packets in synchronized manner. Telecommunications and data centers need such connectivity to function. Authentication is expected in our communications systems, which is largely unavailable in civil GNSS signals. In an age where GNSS spoofing is done to cheat at games like Pokémon Go and now more frequently for nefarious purposes, authentication becomes essential for a modern system (Anderson, 2025, and Xona, 2025a). For resilience to spoofing, Xona included not just data authentication, but also range authentication, so that users can ultimately authenticate their position.
Defense applications require resilience to jamming. World conflicts, particularly currently in Ukraine and the Middle East, have showcased GNSS vulnerabilities in the presence of widespread GNSS jammers. However, this problem is no longer only a defense issue. In 2025, nearly 123,000 commercial flights in Europe were disrupted between January and April alone by GNSS jamming (GPS World, 2025). For resilience to jamming, one method is more power. LEO being 20x closer to Earth than MEO affords nearly a 10x boost in power for the same power transmitted at the satellite. Xona’s target was 100x more power to the end user to significantly reduce the effective range of a jammer by more than six times as shown by recent field trials. Such a transmission power translates to a >97% reduction in affected area and means threats shift to larger and less practical platforms for adversaries, i.e., from requiring handheld devices to backpacks or even truck-sized jammers.
More signal power also has implications for indoor positioning. Internet of things (IoT) devices such as asset trackers are commonly affected by signal obstruction and attenuation during transit, particularly in indoor environments, urban canyons, under foliage, or when obstructed by vehicles and cargo. Warehouses, shipping containers, and other constraints limit where position can be determined. Even coarse indoor positions can support operational intelligence for asset management.
Launching LEO PNT
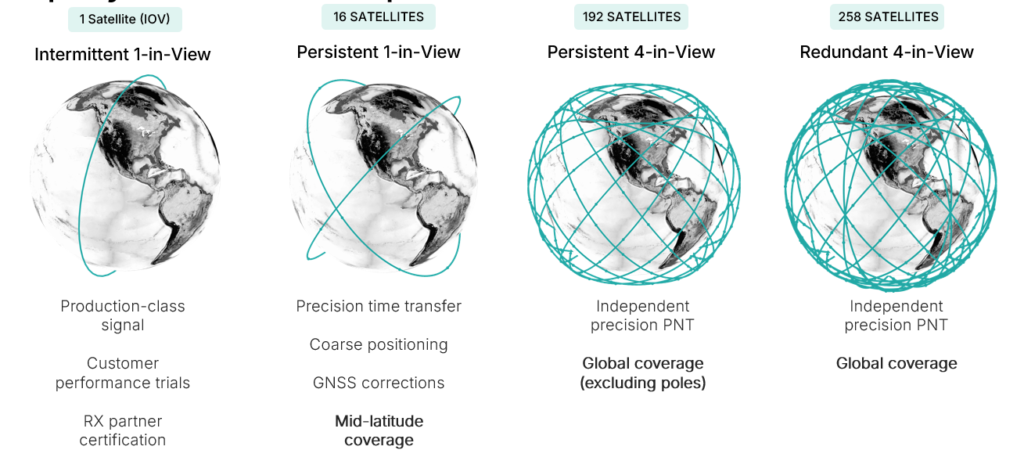
Pulsar is designed to launch in stages as shown in Figure 3, which unlocks capability in tranches that expands the number of features and ultimately the user base. While Pulsar will achieve persistent coverage across major markets at the deployment of 16 operational satellites, earliest customers in time transfer will see value from Pulsar much sooner as an independent source of timing synchronization for devices with holdover clocks. At 16 satellites, Pulsar will achieve persistent 1-satellite-in-view service, unlocking precise time transfer and coarse positioning for stationary users, including indoors. Pulsar also provides a link to stream GNSS corrections, building on a partnership with Trimble. Full resilient positioning will come online with GPS-level satellite visibility. First in the midlatitudes, with 192 satellites, and then globally with the deployment of an additional 66 satellites into polar orbit, bringing the total to 258 operational satellites.
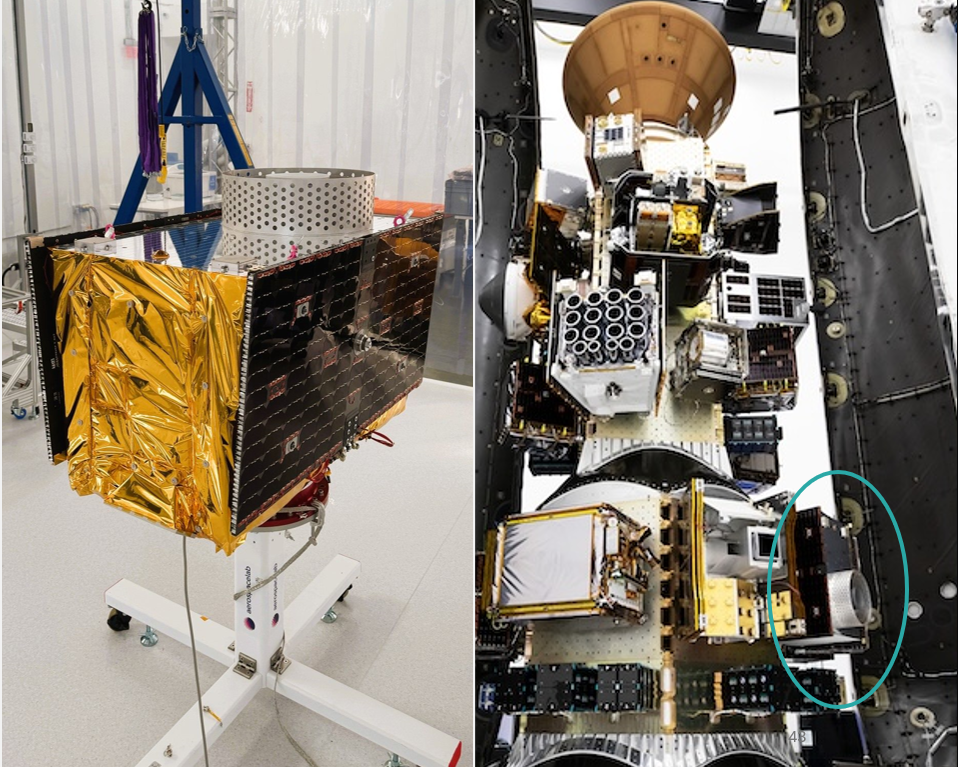
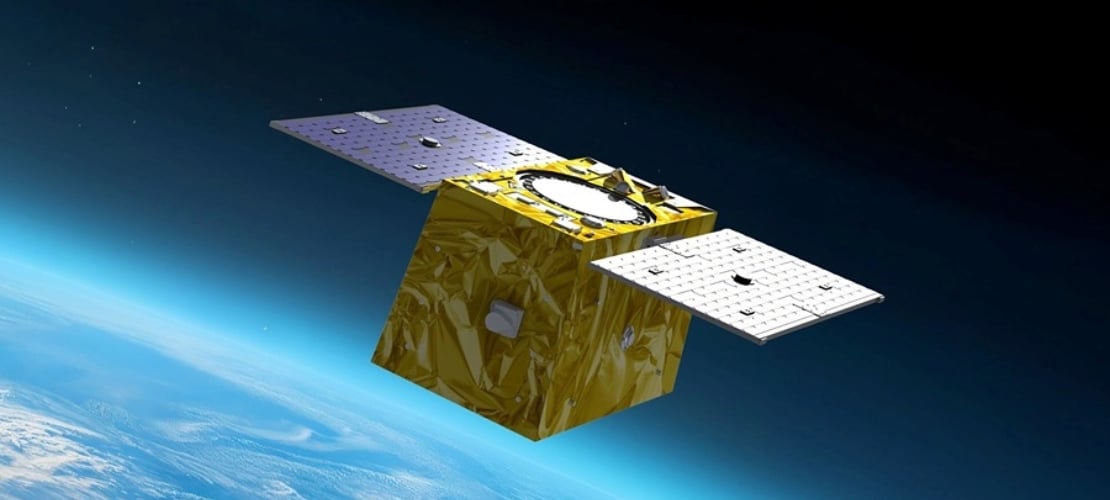
Xona launched its in-orbit-validation stage in June 2025 with Pulsar-0, the first production-class satellite representative of the scaled capability in terms of signal modulation, power and features. Pulsar-0 allowed for performance validation of the complete system, not just of the payload in space but also the tangible benefit to users on the ground. For scale, Figure 4 shows the 150 kg class satellite pre-launch, including its integration on the Falcon 9 launch vehicle. Launch cost has been become more accessible, unlocking the ability to launch larger spacecraft by commercial entities, which can have larger positive impact on the ground (Xona, 2025b).
Figure 4. Xona’s first production satellite Pulsar-0.
LEO PNT on-orbit
In almost 6 months since launch, Pulsar-0 has been tracked in more than 6 countries, 12 third-party receiver protypes, and has achieved several performance milestones that signal the groundbreaking capability Pulsar will deliver to users everywhere when the full constellation is operational. Early performance tests are built to showcase the value and features most important to commercial users in realistic settings.
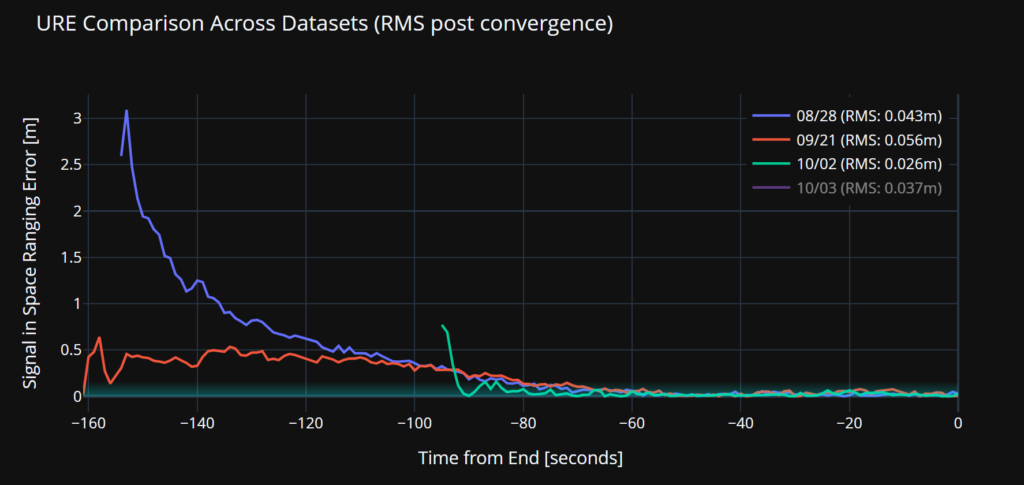
Accuracy. Figure 5 illustrates a signal-in-space user-range-error (SISRE) of 43 mm — about the diameter of a golf ball. This performance represents a more than tenfold increase in accuracy compared to that reported by GPS (Refro et al., 2024). The implication is an ability to natively perform PPP at the centimeter level, without an additional data link or correction layer.
Figure 5. Estimate of SISRE for Pulsar-0 ranging signal compared with nominal GPS.
Security. Xona is the first organization to show pseudorange authentication from orbit, accomplished using the Pulsar-0 satellite within weeks of the launch (Anderson, 2025). Pulsar is built from the ground up to be secure by design, combining cryptographic authentication of both navigation data and satellite ranging signals with rapidly authenticated signal verification — aiming for a time-to-authentication of approximately four seconds. This layered security significantly raises the technical and financial bar for would-be spoofers. A spoofer spoofing a single satellite continuously should succeed in fooling one second of a Pulsar receiver’s ranging once every 130 years (Xona, 2025a).
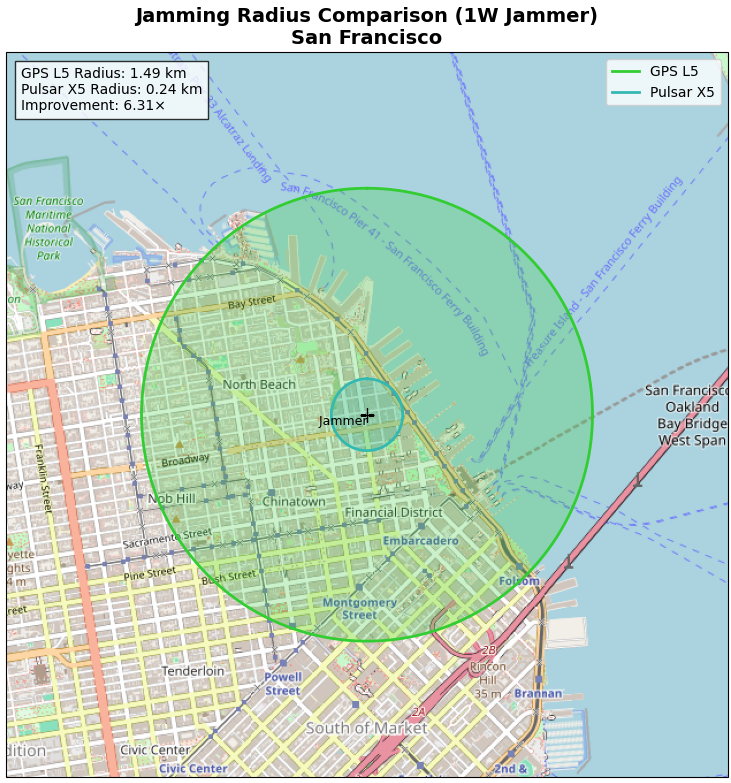
Jamming. Pulsar-0 signal testing has been conducted under live-sky jamming conditions at several jamming events, including Jammertest 2025 in Norway. These campaigns confirmed that using the Pulsar X5 signal can reduce the effective radius of a jammer by 6.3 times as compared to GPS L5 — in other words, less than 3% of the affected area compared to GPS. The same targeted power, bandwidth and type of jammer waveform was used against GPS and Pulsar, including center frequency. For context, Figure 6 shows the implications for a 1 Watt jammer scenario in San Francisco and the reduction brought by a 6.3x reduction in radius.
Figure 6. ffective jamming areas for Pulsar X5 and GPS L5 from a 1 W jammer in San Francisco based on Jammerfest 2025 test results.
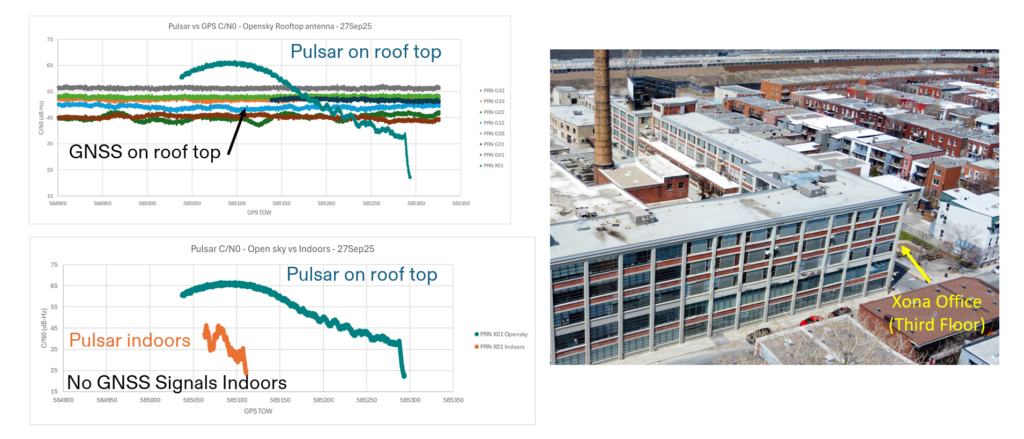
Indoor. Data were collected for several navigation passes per day at multiple locations, including indoors. These include passes at Xona headquarters in Burlingame, California, and its office in Montreal, Canada. The most challenging indoor environment was Montreal, on the third floor of an industrial and primarily concrete building with two floors above. Figure 7 shows the Pulsar-0 power profile during a typical pass, peaking at the highest point in the sky. This structure is an artifact of the antenna gain pattern used in this mission. Designed for a higher altitude for deployment of later satellites, the pattern will be more isotropic with future satellites launched near 1100 km altitude compared to Pulsar-0, which is closer to 500 km. Near apex, the signal penetrates indoors, and this short segment proves to be sufficient for indoor positioning for stationary users. Leveraging techniques based on Doppler and including pseudorange, early results indicate sub-10 meters both outdoors and indoors.
Figure 7. Comparison of Pulsar and GPS signal strengths on roof and indoors at the Xona Montreal office.
EVOLUTIONARY
The coming years will be about gaining operational experience and in scaling the constellation with a near-term focus on the first batch of 16 satellites. Pulsar-0 has already confirmed its value proposition: attaining major milestones in performance including accuracy, security and jamming, but perhaps most importantly in the integration of user equipment. The next year is about working with customers in specific industries and use cases as Xona moves towards deployment of early operational service.
The future of LEO PNT is bright. Theory has evolved to prediction, which is now evolving to reality. The early results appear to lead to an exciting PNT future with LEO PNT expanding the GNSS revolution in terms of security, interference mitigation and system availability both outdoors and indoors for a myriad of current and new applications and users.
Further Reading
Anderson J (2025). World’s First Authenticated Satellite Pseudorange from Orbit, Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), Baltimore, Maryland, September 2025, pp. 738-748.
Eissfeller B, Pany T, Dötterböck D and Förstner R (2024). A Comparative Study of LEO-PNT Systems and Concepts, Proceedings of the ION 2024 Pacific PNT Meeting, Honolulu, Hawaii, April 2024, pp. 758-782.
Li W, Yang Q, Du X, Li M, Zhao Q, Yang L, Qin Y, Chang C, Wang Y, Qin G (2024). LEO augmented precise point positioning using real observations from two CENTISPACE™ experimental satellites. GPS Solutions, 28(1): 44.
Mah C, O’Keefe K (2025). Hardware Simulation of Low-Earth-Orbit GNSS for Carrier Phase Ambiguity Resolution, Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), Baltimore, Maryland, September 2025, pp. 2431-2443.
Prol FS, Ferre RM, Saleem Z, Välisuo P, Pinell C, Lohan ES, Elsanhoury M, Elmusrati M, Islam S, Çelikbilek K, Selvan K, Yliaho J, Rutledge K, Ojala A, Ferranti L, Praks J, Bhuiyan MZH, Kaasalainen S and Kuusniemi H (2022). Position, Navigation, and Timing (PNT) Through Low Earth Orbit (LEO) Satellites: A Survey on Current Status, Challenges, and Opportunities, IEEE Access, (10): 83971-84002
Reid TGR, Chan B, Goel A, Gunning K, Manning B, Martin J, Neish A, Perkins A and Tarantino (2020). Satellite Navigation for the Age of Autonomy, 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, Oregon, April 2020, pp. 342-352.
Reid TGR, Gala M, Favreau M, Kriezis A, O’Meara M, Pant A, Tarantino P and Youn C (2025). Xona Pulsar Compatibility with GNSS. Proceedings of the 38th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2025), Baltimore, Maryland, September 2025, pp. 929-943.
Reid TG, Neish AM, Walter T and Enge PK (2018). Broadband LEO constellations for navigation. NAVIGATION: Journal of the Institute of Navigation, 65(2): 205-20.
QinetiQ and Xona Space Systems have demonstrated how GPS navigation can be bolstered by using low Earth orbit (LEO) satellites, in the first UK tests of Xona’s new satellite navigation system, Pulsar.
This marks a major milestone in the development of next-generation positioning, navigation and timing (PNT) capabilities, increasing resilience against jamming and spoofing, as well as improving GPS availability in congested or challenged environments.
In the tests, QinetiQ’s Q40 multi-constellation GNSS receiver acquired and tracked signals from Xona’s first production-class satellite, Pulsar-0. The tests demonstrated that, by supplementing GNSS with LEO satellite signals like the Pulsar X1, enhanced resilience in contested or poor-signal environments can be achieved.
A recent software upgrade to QinetiQ’s Q40 was developed under the European Space Agencies’ Navigation Innovation and Support Program (NAVISP) in the GNSS Receiver with Advanced Pulsar Enhancement (GRAPE) project.
GRAPE is a collaboration between QinetiQ and Xona, supported by the UK Space Agency and European Space Agency. Its goal is to explore how new LEO-based signals can be integrated with existing GNSS, to enhance the accuracy and resilience of navigation services for defense, critical infrastructure and future autonomous applications.
“For the first time, we have demonstrated how signals from new LEO satellites can be used alongside existing GNSS to give users stronger, more resilient timing and position information,” said Chris Walker, Managing director, Mission Systems Division, QinetiQ. “This is a huge step in increasing the protection of our defence, critical infrastructure and future autonomous systems against interference.”
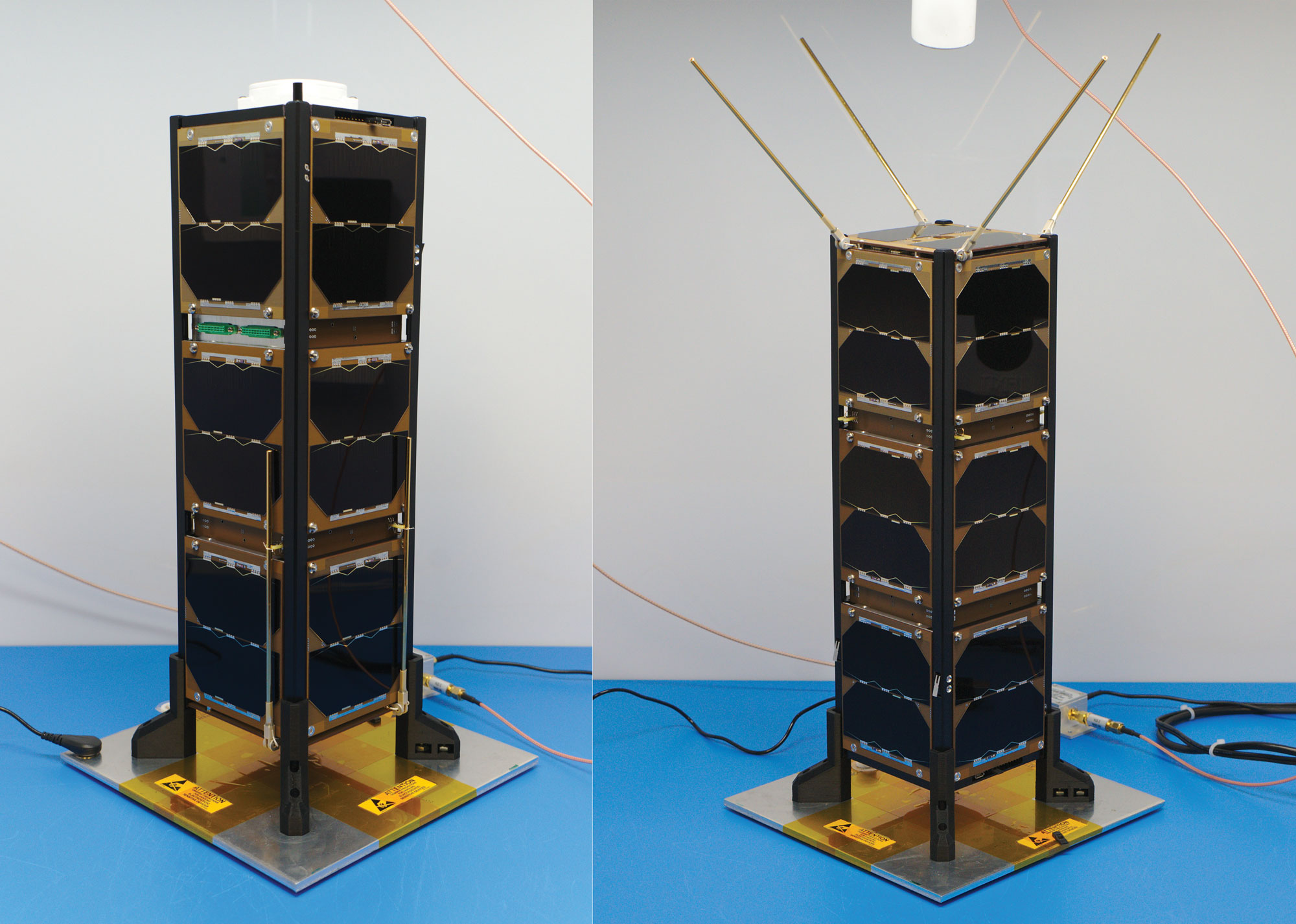
Figure 1: Bobcat-1, with communications antenna stowed (left) and deployed (right). Bobcat-1 measures approximately 10 x 10 x 30 centimeters. (All figures except FIGURE 3 provided by the authors)
Bobcat-1 was a three-unit CubeSat developed and built at Ohio University’s Avionics Engineering Center in Athens, Ohio, and was named after the university’s mascot. FIGURE 1 shows Bobcat-1 with and without its antenna deployed. The satellite was launched to the International Space Station in October 2020 (see FIGURE 2) and deployed into low-Earth orbit (LEO) the following month (see FIGURE 3). In April 2022, it deorbited and burned up in Earth’s atmosphere as planned, after a successful 17-month mission, lasting eight months longer than anticipated. The last signal decoded from Bobcat-1 was received only about 10 minutes before the satellite’s demise, from an altitude of about 109 kilometers, by an amateur radio operator (ZR6AIC) near Johannesburg, South Africa, associated with SatNOGS, a global network of amateur satellite-networked open ground stations.
The main mission of the Bobcat-1 CubeSat was to evaluate the feasibility of GNSS-to-GNSS time offset monitoring from LEO. One of the secondary mission objectives was GNSS spectrum monitoring.
In addition, Bobcat-1 also included a side-mission, hosting a software-defined GPS/Galileo receiver developed by the University of Padova and Qascom — an Italian engineering company providing security solutions in satellite navigation and space cybersecurity — to perform its in-space demonstration and testing. This receiver served as a prototype for the receiver soon to be launched on NASA’s Lunar GNSS Receiver Experiment (LuGRE) mission.
Communications and control of the satellite utilized the 70-centimeter amateur radio satellite band (435-438 MHz) at a typical data rate of 60 kilobits per second and were primarily conducted using a dedicated ground station on the roof of the engineering building at Ohio University (see FIGURE 4). In total, Bobcat-1 collected and downlinked more than 656 megabytes of data during its lifetime. Over the course of the mission, Bobcat-1’s firmware was updated in-orbit on six occasions, allowing for minor enhancements to the data collection system.
Figure 2: Bobcat-1 launches aboard the Cygnus NG-14 resupply mission to the International Space Station. (All figures except FIGURE 3 provided by the authors.)
BACKGROUNDS: GNSS-TO-GNSS TIME OFFSET
GNSS-to-GNSS time offsets — also referred to as GNSS inter-constellation time offsets, inter-system biases or XYTOs — are among the critical parameters for full GNSS interoperability. Users with poor GNSS visibility, such as high-altitude spacecraft, which operate above the GNSS constellations, often do not have enough satellites in view to enable an accurate solution and can experience high dilution of precision. These users could benefit from XYTO estimates provided externally, assuming their receiver-characteristic inter-system biases (ISBs) are calibrated.
To determine a user solution using measurements from a single GNSS constellation, one must solve for four unknown parameters: the user’s spatial coordinates and the receiver-to-system time offset. This means that a minimum of four satellites must be visible to solve for a user solution. If a user has sufficient visibility of satellites from different constellations, a multi-GNSS solution can be determined. However, when applying measurements from multiple constellations, an additional unknown is added for each constellation used. For example, for a user solution incorporating measurements from both GPS and Galileo, one needs to solve for five unknowns: the user’s spatial coordinates, the receiver-to-GPS time offset, and the receiver-to-Galileo time offset. Since each constellation’s time scale is independent of the others, the inter-system time offset between the time scales leads to a prominent bias in a multi-constellation solution. Inter-system time offsets between GPS, Galileo, GLONASS, and BeiDou are generally expected to range from 10 to 100 nanoseconds, resulting in 3 to 30 meters of possible positioning error.
System-to-system time offsets are currently estimated by extensive networks of ground stations, such as those used by the International GNSS Service Multi-GNSS Experiment (MGEX). In addition, GNSS service providers often broadcast XYTO estimates in their navigation messages.
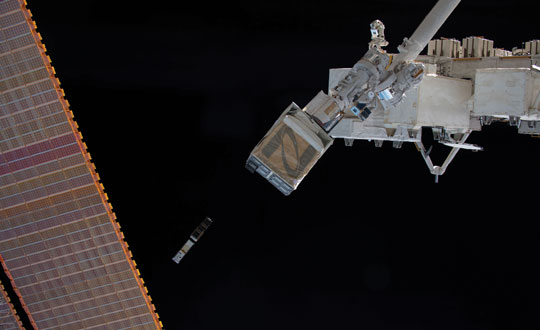
Figure 3: Bobcat-1 is deployed into low-Earth orbit by the Nanoracks CubeSat Deployer alongside SPOC, a CubeSat developed by the University of Georgia. (Photo: NASA)
So, why would estimating XYTOs from LEO be of interest?
Low-Earth orbit enables high GNSS visibility. The approximately 90-minute orbital period allows for observations from nearly all GNSS satellites multiple times per day. This enables high visibility of multiple satellites from each constellation, in turn enabling high observability of constellation parameters such as XYTOs, leveraging satellite-characteristics errors. In addition, tropospheric errors are absent and multipath is limited and can be bounded based on the CubeSat’s dimensions and geometry. Exploiting measurements from LEO could provide additional measurements and independent monitoring of the XYTO estimates provided by ground networks.
However, to estimate system-characteristic XYTOs, the receiver-characteristic biases need to be calibrated. The target is to reach accuracy of approximately 1 nanosecond or possibly lower. Therefore, the error sources need to be evaluated, mitigated, or bounded.
Figure 4: Bobcat-1’s dedicated ground station on the roof of Stocker Center in Athens, Ohio. (All figures except FIGURE 3 provided by the authors.)
Although the ionospheric effects are lower in LEO than on Earth, they cannot be neglected. Therefore, dual-frequency ionospheric delay estimates must be applied. To do so, the receiver’s inter-frequency biases (IFBs), which can introduce errors on the order of nanoseconds, need to be calibrated, as well as the satellite differential code biases (DCBs), orbit and clock errors and receiver antenna group delay. An additional challenge introduced by the LEO environment is the wide range of temperatures to which the receiver is subjected. Over a single orbit, the receiver’s temperature can vary from approximately 0 to 50 degrees Celsius. The effects of these temperature variations cause fluctuations in the receiver’s IFBs, which need to be evaluated and calibrated. Pre-launch measurements in a controlled environment using a climate chamber and two receivers of the same make and model were used for calibration. We have detailed those measurements elsewhere.
The multipath error can be bounded, as a first approximation, to 10 centimeters (or about 0.3 nanoseconds in equivalent signal delay) due to the dimensions of the CubeSat. However, given the mount of the antenna is on one of the CubeSat’s two 10 × 10 centimeter faces, that upper bound is in practice much smaller and the multipath error is mostly negligible.
Finally, the last remaining major error sources to be calibrated are the receiver ISBs. The main goal, to demonstrate the feasibility of LEO-CubeSat-based monitoring of GNSS XYTOs, requires showing the stability (or the repeatability) of the receiver biases in orbit.
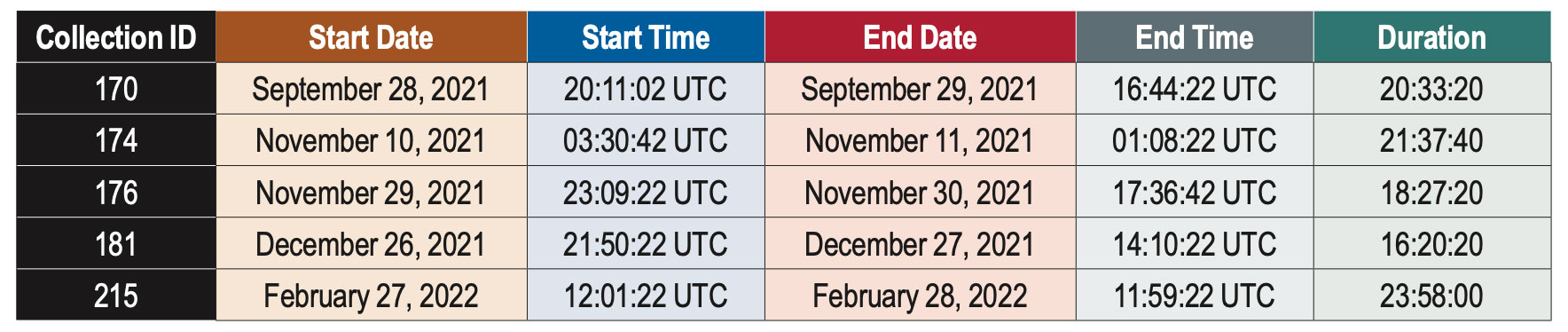
Table 1: Summary of data collections discussed in this article.
DATA COLLECTION
Bobcat-1’s primary payload was a NovAtel OEM719, a triple-frequency multi-GNSS receiver, enabling measurements on all frequencies from GPS, GLONASS, Galileo and BeiDou, as well as the regional navigation satellite systems (RNSSs) QZSS and NavIC. The measurements were collected and downloaded, for post-processing purposes.
Pseudorange and carrier-phase measurements, as well as carrier-to-noise-density ratio estimates, were collected, together with the receiver’s position and velocity estimates, and other parameters such as the temperature measured by the two sensors embedded in the receiver. In limited instances, power spectral density measurements and in-phase and quadrature (I/Q) component samples were collected to support the secondary mission, GNSS spectrum monitoring. The limited downlink capacity of the satellite constrained these measurements to short time intervals.
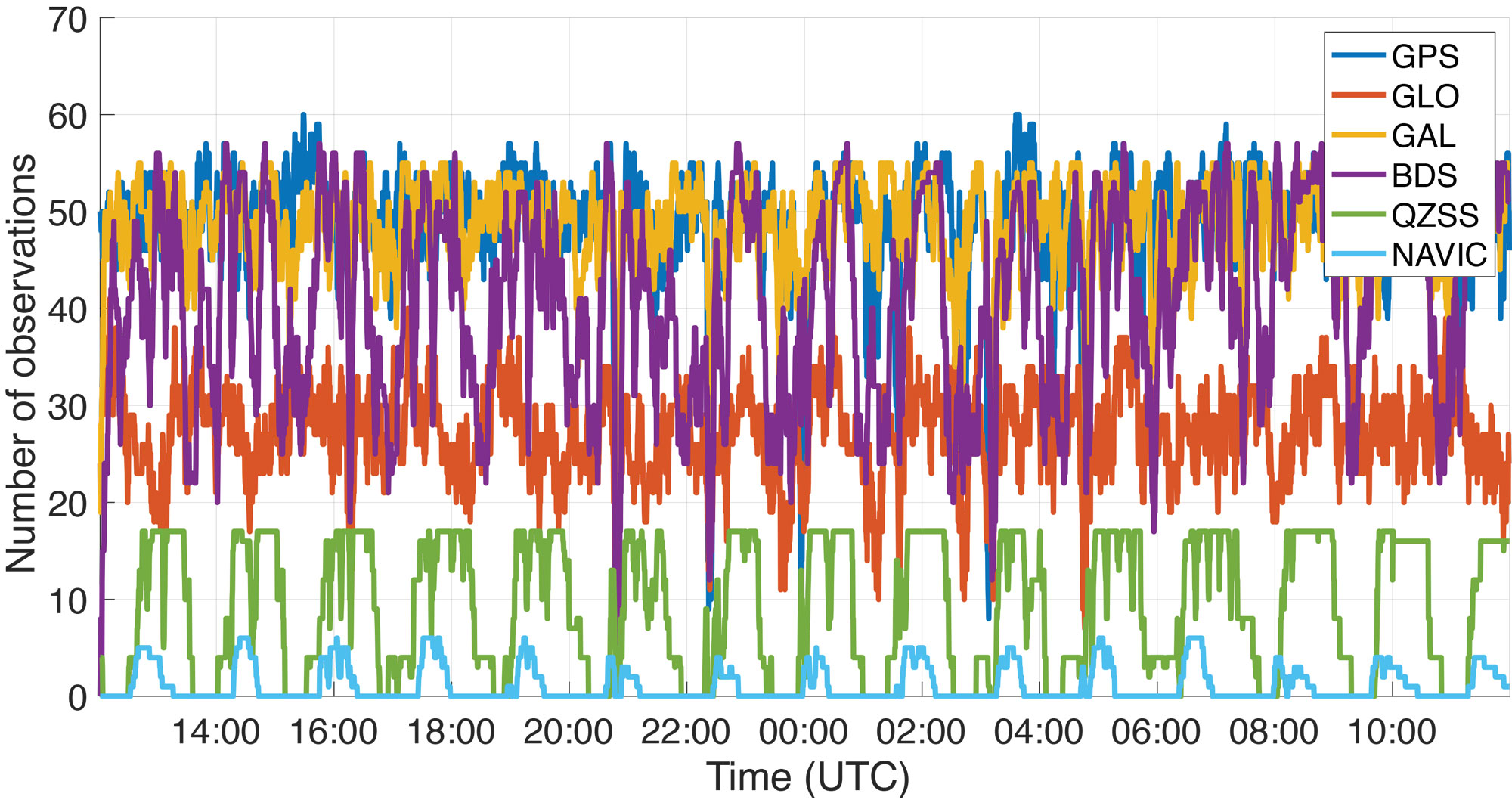
Figure 5: Number of observations recorded by Bobcat-1 from each GNSS constellation during a data collection started on February 27, 2022.
The goal of the mission is to estimate the XYTOs for all the GNSS constellations. However, in this article only the Galileo-to-GPS time offset (GGTO) is considered. The Galileo Performance Reports published by the European Union Agency for the Space Programme (EUSPA) provide information on the accuracy of the GGTO broadcast parameters, which are typically within approximately 3 nanoseconds of the true GGTO. Therefore, the broadcast GGTO provides a point of comparison and reference for Bobcat-1’s estimates.
A summary of the data collections considered in this work is provided in TABLE 1. These data collections are among the longest recorded by Bobcat-1. As an example, FIGURE 5 shows Bobcat-1’s data collection for February 27, 2022. It should be noticed that data collections were initiated from the control station at Ohio University when the CubeSat was in view, and each data collection would start only when the satellite’s battery voltage was above a defined threshold. The collection would stop safely if a minimum voltage threshold was reached. The data sets collected during the first months of the mission had durations limited to one to four hours, since the minimum battery voltage threshold was set conservatively. However, as the mission continued, data collections recorded in the last several months before deorbiting were configured with lower thresholds, enabling continuous data collections with durations of up to 24 hours. During the longer data collections, the sampling period was set to 20 seconds to reduce the total quantity of data stored and downlinked. The work described here focuses on a select few data collections that span a period of five months between September 28, 2021, and February 27, 2022.
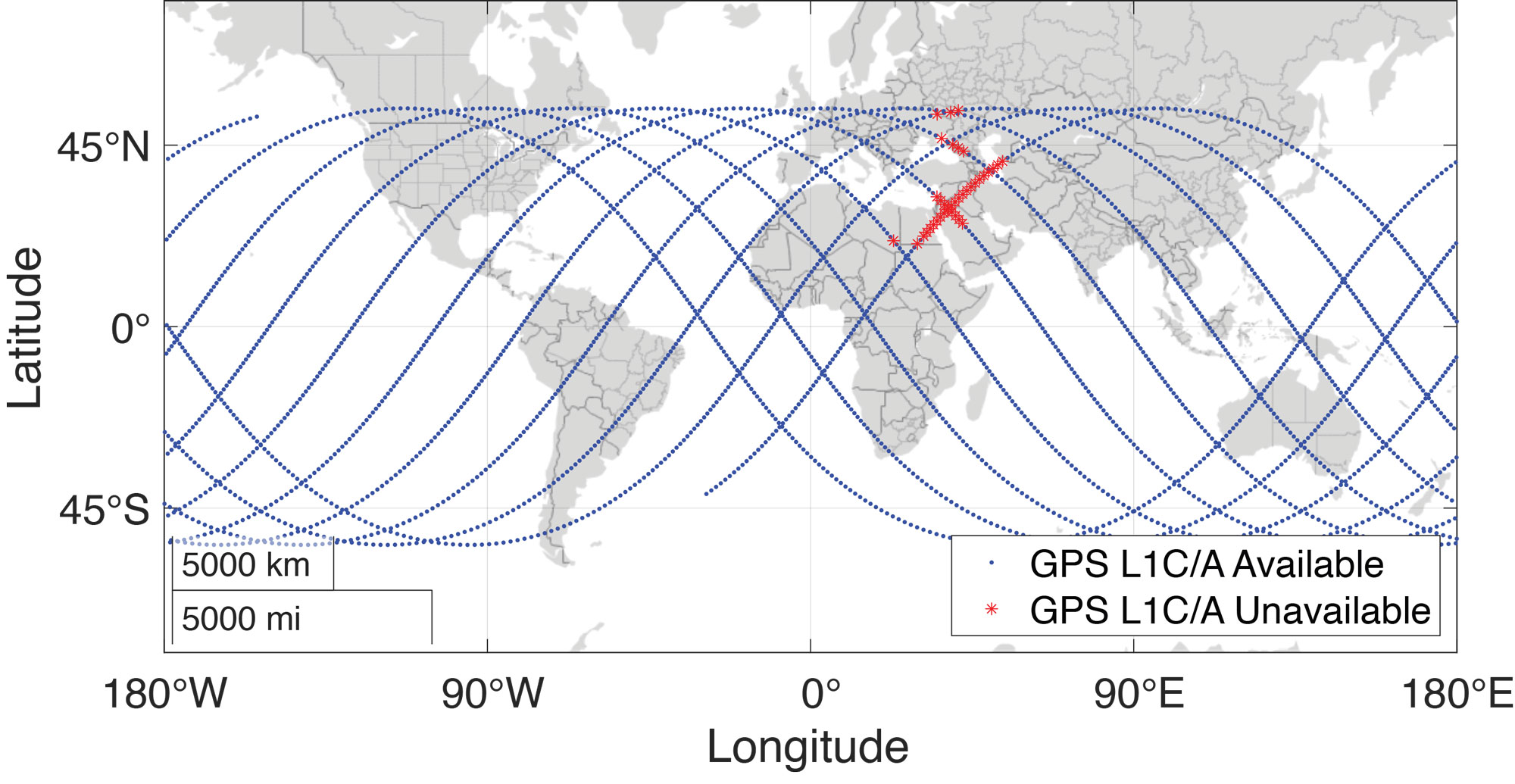
Figure 6: Bobcat-1’s ground track during a data collection for XYTOs estimation held in February 2022, approximately 24-hours long. Note that the blue dots correspond to the positions (latitude and longitude) of Bobcat-1. The red stars indicate that even if the position was calculated thanks to a multi-frequency and multi-GNSS solution, GPS L1 C/A measurements were not available. Analysis of the carrier-to-noise-density ratio measurements and comparison with the available spectrum measurements showed that in correspondence to those positions interference was present.
The data contain multi-frequency measurements from all systems, with an average of 180 observations made per sample. The maximum number of observations at once was 217. While multi-frequency measurements were collected from all constellations, this analysis only uses single-frequency measurements from two constellations: GPS L1 C/A and Galileo E1C.
RESULTS
There are two simple approaches to calculating inter-constellation time offsets: one involves computing multiple single-constellation user solutions, and the other involves a single multi-constellation user solution. Each approach has slightly different effects in terms of error propagation. In the first approach, the XYTOs can be calculated by taking the difference of the independently calculated receiver-to-system time offsets. This method requires at least four satellites from each constellation to be visible. In the second approach, all the receiver-to-system time offsets for all constellations involved in the solution are solved simultaneously. This reduces the number of measurements required per-constellation, with the minimum number of measurements needed being equal to the number of unknown state variables.
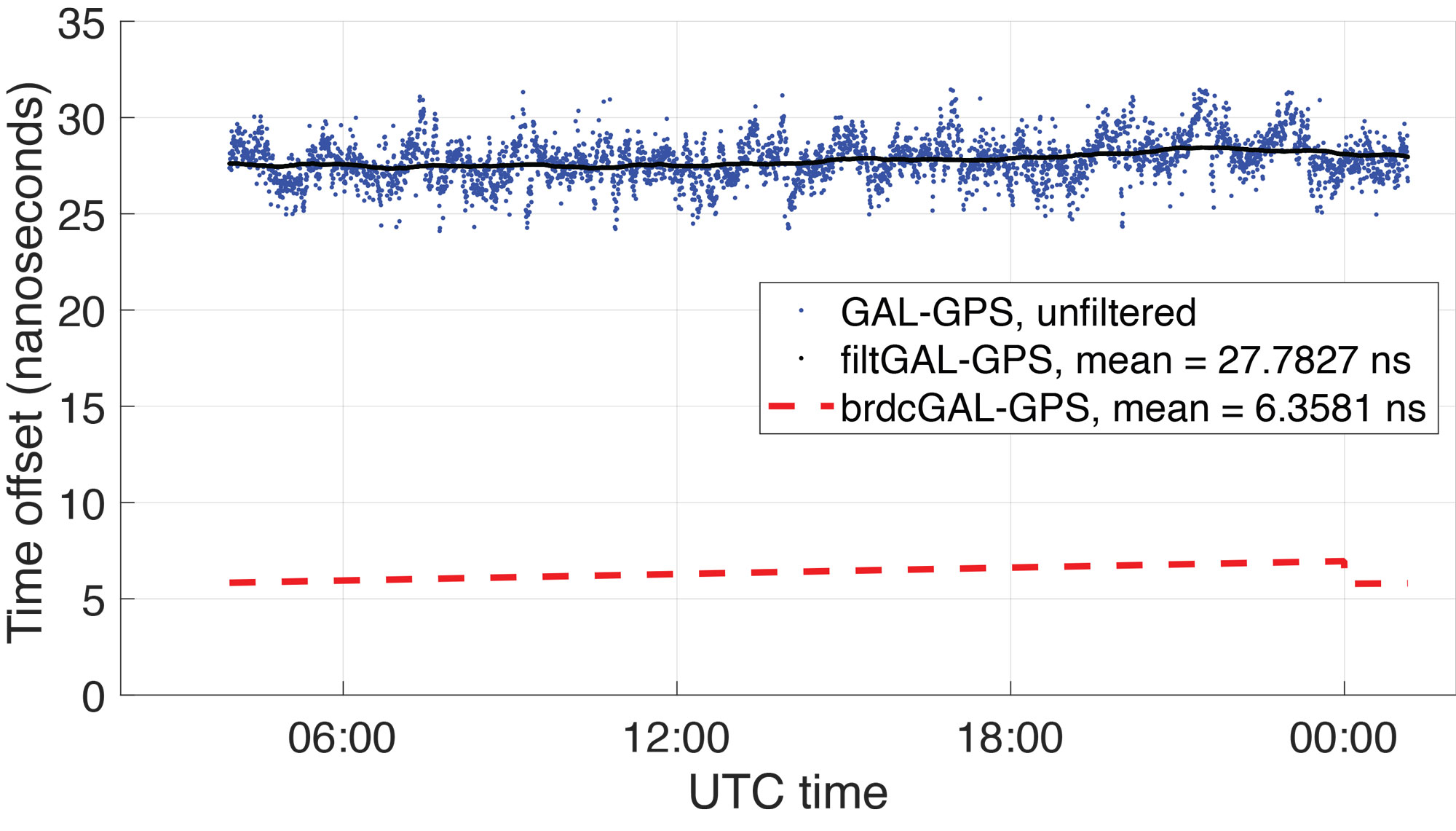
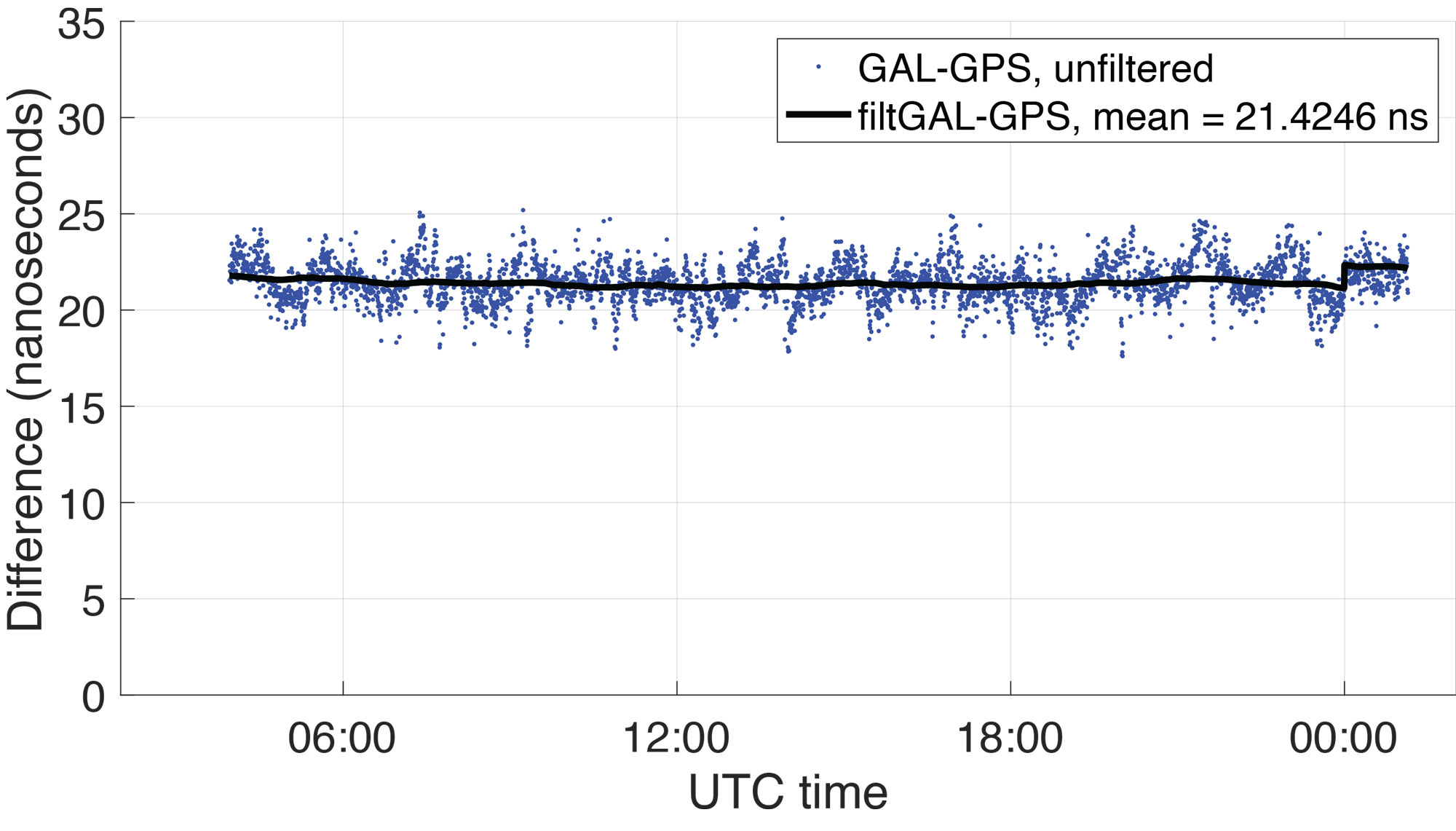
Figure 7: Broadcast GGTO (red) compared to Bobcat-1 Galileo-GPS time offset estimate, before calibration (blue) and filtered estimate (black). The results are related to data collection 181, started on December 27, 2021, which lasted about 16 hours (more than 10 orbits). The estimates’ variations, on the order of ±5 nanoseconds, are mainly due to temperature effects during the orbit and here are simply represented with a moving average.
In general, the latter method improves the XYTOs’ solution availability since the receiver-to-system time offsets for each system can be calculated with even fewer than four measurements from each system. For each sample point, the user solution was determined using this method, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset. This method allows the XYTO to be estimated by the receiver even when visibility is degraded. For example, as shown in FIGURE 6, Bobcat-1’s data collections are affected by interference, mostly on GPS L1, in some regions. Points where interference was believed to be present are marked by red stars on Bobcat-1’s ground track shown in the figure, specifically denoting points where the number of tracked GPS L1 C/A signals drops below four. For each sample point, the user solution was determined using the method discussed above, and the GGTO estimate was calculated by taking the difference of the receiver-to-GPS time offset and the receiver-to-Galileo time offset.
Figure 8: Difference between Bobcat-1 estimate and GGTO. The residual is mainly an estimate of the receiver inter-system bias that even pre-calibration shows to be stable in orbit as shown in Table 2.
FIGURE 7 shows (in blue) the GGTO estimate using Bobcat-1 measurements (data collection 181, started on December 27, 2021, and lasted about 10 orbits). The plotted values are the estimate of the system-to-system bias (GGTO) from which the receiver-specific ISB (Galileo-to-GPS) has not yet been removed. The oscillations visible in the unfiltered GGTO estimates are the result of temperature effects on the receiver. They can be mitigated by applying the calibrations made during pre-launch climate chamber testing, though for this analysis the estimates are simply filtered using a moving average (shown in black in the figure). Note that the abrupt change in the broadcast GGTO about 21 hours after the collection start corresponds to the start of a new day in UTC time, when a new estimate of the broadcast GGTO parameters was provided.
In FIGURE 8, the difference between the Bobcat-1 estimate of the GGTO and the broadcast GGTO is plotted (raw, in blue, and filtered with a moving average, in black). This is an estimate of the Bobcat-1 receiver’s Galileo-to-GPS ISB, which needs to be stable and repeatable in orbit, to enable accurate estimates of the true GGTO. As Figure 8 indicates, the receiver ISB shows stability even before calibration, showing periodical variations mainly due to temperature changes over the orbit.
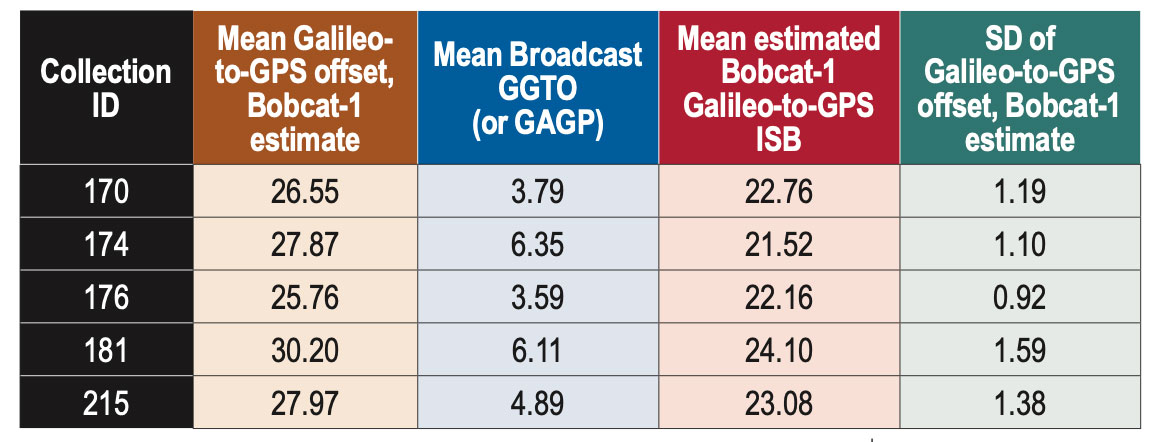
TABLE 2 summarizes some results over a five-month period. Only the longest data collections were considered, but the shorter ones are also under analysis to provide a longer and denser observation window. From the data in Table 2, the Bobcat-1 receiver’s mean Galileo-to-GPS ISB, estimated by comparison with the broadcast GGTO, shows a standard deviation, pre-calibration, of less than 1.5 nanoseconds over five months. Considering that the accuracy on the broadcast GGTO is expected to be ≤ 3 nanoseconds, this estimate of the receiver ISB shows that its stability over time may enable accurate XYTO monitoring from LEO.
Table 2: Bobcat-1 Galileo-to-GPS time offset vs broadcast GGTO, for different data collections over about five months. All figures in columns two through five are in nanoseconds.
The implementation of the receiver bias calibration, including the temperature effects, will refine this result. The final test will include assessing the performance of the calculated system XYTO, utilizing it in the solution of another receiver previously calibrated and at a known location.
CONCLUSIONS
Results of five 15+ hour data collections spanning a period of five months are compared. The difference between the broadcast GGTO and the GGTO estimate calculated using data from Bobcat-1 appears to be stable within 1.5 nanoseconds. Observing the in-orbit data and comparing it with the data collected previously in a controlled environment in the laboratory, a high correlation is observed between the bias change over time and the measured receiver temperature. The mitigation of this effect will enable stability of our receiver characteristic GGTO estimate to within 1 nanosecond. These experimental results suggest that a few multi-GNSS receivers in LEO could provide a method to monitor XYTOs in near real time, providing redundancy and diversity to the ground-network-based estimation system.
ACKNOWLEDGMENTS
The authors would like to acknowledge NASA’s Satellite Communication and Navigation Office (SCaN), NASA’s Glenn Research Center, NASA’s CubeSat Launch Initiative (CSLI), and Ohio University for funding the Bobcat-1 CubeSat mission. Additionally, we thank Kevin Croissant and Gregory Dahart, previous student members of the Bobcat-1 team, and Dr. Frank van Graas, Ohio University Professor Emeritus and former faculty member of the Bobcat-1 team.
This article is based on the paper “Receiver-specific GNSS Inter-system Bias in Low-Earth Orbit” presented at ION ITM 2023, the 2023 International Technical Meeting of the Institute of Navigation, Long Beach, California, January 23-26, 2023.
The European Space Agency (ESA) is in search of European companies interested in taking part in the in-orbit demonstration of a low-Earth-orbit (LEO) satellite navigation constellation utilizing novel frequencies and capabilities.
Those interested in participating are encouraged to attend ESA’s LEO-PNT Industry Day on March 7 at the ESTEC technical center in the Netherlands. The LEO-PNT Industry Day will give an overview of the project to companies, research institutions and ESA delegates from Member States.
A detailed invitation will be issued soon, covering all aspects of the LEO-PNT Orbit Demonstrator, including the space and ground segments, operations, launchers, the test user segment, experimentation, and segment demonstration.
Registration by Feb. 27 is required. To learn more, visit atpi.eventsair.com.
LEO satellites would supplement the existing Galileo constellation. (Image: ESA)
On March 20, a South Korean Earth Observation satellite will be sent to space, carrying a navigation receiver from RUAG Space to determine the satellite’s position in orbit. The Earth Observation satellite is being launched by the Korea Aerospace Research Institute (KARI), South Korea’s space agency.
The precision single-frequency low Earth orbit GNSS receiver, called LEORIX, is a GPS + Galileo receiver from RUAG Space’s new generation of receivers.
More than 80 RUAG Space receivers of the latest generation (LEORIX for Low Earth Orbit, GEORIX Geostationary Orbit and PODRIX) have been ordered by customers in Asia, Europe, Middle East and the United States. They will be launched for various low and geostationary Earth Orbit missions within the next few months and years.
Currently, 22 navigation receivers from RUAG Space are in orbit. The satellite CAS-500-1 will be launched aboard a Russian Soyuz-2 launch vehicle from the spaceport in Baikonur, Kazakhstan.
After the launch of CAS-500-1, South Korea plans to send the CAS500-2 satellite to space. A launch date of this second mission is not yet defined. The CAS500-2 mission also will fly with a LEORIX receiver from RUAG Space. The satellite builder — Korea Aerospace Industries (KAI) — already has received the space-borne navigation receiver.
PODRIX in Space
Since November 2020, two new Precise Orbit Determination Receivers (PODRIX) from RUAG Space have been in orbit. They determine the position of ocean-monitoring satellite Sentinel-6.
The PODRIX GNSS spaceborne receiver achieves a very high, real-time in-orbit accuracy of the satellite’s position in orbit from below one meter to a few centimeters using on-ground post-processing. The high accuracy is achieved through simultaneously processing of multi-frequency signals from GPS and Galileo.
PODRIX GNSS spaceborne receivers are built on the experience of the more than 20 GPS-only receivers of the RUAG Space legacy receiver generation now in orbit.
The receivers precisely determine the position of a satellite once in orbit, which improves the satellite’s performance. Sentinel-6 measures the sea level on a global scale with unprecedented accuracy, which is crucial for climate change research. Every millimeter or centimeter in further precision highly improves the performance of the mission. The more precise the Sentinel-6 spaceborne GNSS receiver from RUAG Space works, the more precise are the data of this climate mission.
RUAG Space is a supplier to the space industry in Europe, and has a growing presence in the United States. It develops and manufactures products for satellites and launch vehicles, playing a key role both in the institutional and commercial space market. RUAG Space is part of RUAG International, a Swiss technology group focusing on the aerospace industry.
Not just supporting players, alternative positioning, navigation and timing (PNT) systems strengthen, augment and — when needed — replace GNSS. GPS World explores how companies are using alternative PNT, and talks with John Fischer of Orolia about the company’s latest developments.
GPS World: What are Orolia’s latest advances and products regarding alternative PNT?
John Fischer: Regarding timing, which we have been doing for decades, our big alternatives to GNSS are internal atomic clocks and network-based timing, such as precision time protocol (PTP). Regarding positioning and navigation, the two areas on which we focus are IMUs and getting updates from GNSS, so that, when you lose GNSS momentarily, you have something on which to coast. The breakthroughs in MEMS technologies are astounding —they are getting better and cheaper every day. That shows wonderful promise.
The other area is doing satellite navigation using low Earth orbit (LEO) satellites, which are much closer to the Earth than GNSS ones and give you 30 dB or more of signal strength. We are focused the most on the Satellite Time and Location (STL) signal because it is available today. Supplementing your navigation system with updates from LEO satellites provides you some great non-GNSS navigation capability.
GPS World: The positions of LEO satellites are not monitored as closely as those of GPS satellites. Is that an issue?
JF: That is correct. You are losing accuracy by using what is available today because you do not know the positions of those satellites as well as you know those of the GNSS satellites and maybe you do not have the best geometry. All the GNSS satellites are in medium Earth orbit (MEO) because they have much better geometries for a small constellation. With just 24 satellites in MEO orbit, you get great geometries. When you go lower, you need an increasingly greater number of satellites.
The first generation of LEO satellites, the Iridium STL, are a much larger constellation, with 66 satellites, but still not enough to give you the good geometries. Today, you are getting less accuracy, but there are all kinds of new satellites being launched and the capability to track them will improve. We expect to be able to use signals from hundreds, if not thousands, of LEO satellites, so the geometry problem will start to go away and there are other things we can do to improve the accuracy. Meanwhile, we can get rather good performance with what we have today.
GPS World: What are some of your most recent advances, releases or products?
JF: On the timing side we have what we call a mini-Rubidium, the mRO-50, which we launched on June 4. Smaller, better, cheaper atomic clocks are coming out very soon.
GPS World: Do you have any comments on the recent executive order on resilient PNT?
JF: We coined the term “resilient PNT,” so we are glad to see it in use. We fully support those efforts.
GPS World: What about other alternative sources of PNT data, such as radar, lidar and signals of opportunity?
JF: Yes, they are that next level. Loran is ideal because it is so different from GNSS. When you are trying to design a reliable system, you want a lot of diversity, because if two systems have the same kinds of failure modes you have not gained in redundancy. Loran is literally at the other end of the spectrum from GNSS: It is a low-frequency microwave system. Instead of being space-based, it is land-based; instead of being low power, it is high power. However, there still are no stations up. It requires big equipment, so it will take some time.
When it comes to what you can do today, Loran does not contribute much. We support efforts to implement Loran very much, because we do need non-GNSS ways to make things resilient. Prior to GPS, we had to depend only on Loran. Today, with modern digital signal processing (DSP) techniques and receivers, I think we can expect the new Loran system to have much better accuracies than we had in the bad old days of the first generation of Loran.
The auto industry is doing a marvelous job of doing navigation using lidar or cameras. They are pretty much navigating driverless cars the way that humans drive, by just using visual cues. Those things have promise in certain unique areas.