New algorithm cuts indoor positioning error by nearly half
Conventional indoor positioning often depends on expensive Wi-Fi or Bluetooth infrastructure, or on inertial sensors that accumulate drift within seconds. Magnetic navigation has emerged as a promising alternative because steel structures and electronics leave buildings with unique, location-specific magnetic signatures.
However, existing map-free methods rely on polynomial models that oversimplify the magnetic field’s spatial variations. They capture the broad trend but miss the sharp, local anomalies caused by metal pipes or distribution boxes.
With these limitations, a more accurate, robust, and physically interpretable approach to magnetic field modeling is urgently needed for practical indoor navigation.
A team from the Aerospace Information Research Institute, Chinese Academy of Sciences, publishing (DOI: 10.1186/s43020-026-00201-3) in the journal Satellite Navigation on June 5, has unveiled a robust magnetic-inertial odometry (MIO) method based on the Fibonacci sphere-sampled equivalent magnetic dipole model, denoted as FSS-EMD-MIO. The system uses an array of 30 small magnetometers and an inertial measurement unit to track movement without any external signals.
The core innovation lies in how the system models the indoor magnetic environment. Instead of drawing smooth curves through the data, it represents the local field as a combination of virtual “equivalent magnetic dipoles” — with 16 dipoles identified as optimal through systematic parameter analysis.
Their positions are determined by the Fibonacci sphere sampling technique, which evenly distributes points in 3D space without any directional bias, preventing overfitting. Each dipole’s magnetic moment is then solved in real time using least squares fitting.
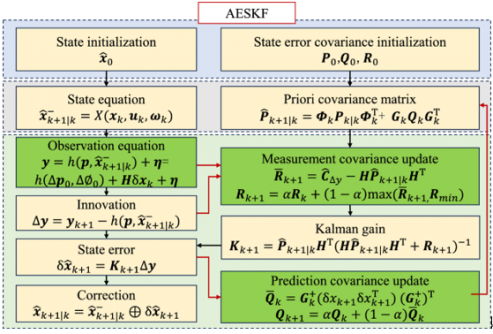
The team also derived the spatial gradient of this model, creating a direct mathematical link between changing magnetic readings and the carrier’s displacement, velocity, and attitude. To handle the inherent nonlinearity and location-dependent noise, an adaptive error state Kalman filter fuses inertial data with magnetic observations. Tested on a public dataset, the method achieved a horizontal positioning root mean square error below 1.27 meters, outperforming the previous state of the art (MAINS) by 46% on average.
“The old polynomial methods look at the magnetic field from far away — they see the hills but not the potholes. Our model places virtual sources exactly where the magnetic perturbations live,” the authors explained. “The Fibonacci sphere sampling ensures that no direction is favored, so whether you tilt the sensor or walk in circles, the system adapts reliably. We essentially gave the building’s chaotic magnetic field a readable 3D structure. This means first responders or warehouse robots can finally have a ‘magnetic compass’ that works even when the lights are off and GNSS is out.”
The research paves the way for truly infrastructure-free indoor navigation. Potential applications include guiding firefighters through smoke-filled buildings, tracking inventory robots in steel-racked warehouses, and providing positioning for autonomous vehicles in parking garages or mines. The authors note that future work will incorporate loop-closure detection to correct long-term drift, akin to how a person recognizes a familiar intersection.
By developing scan-matching algorithms based on overlapping magnetic field regions, the team aims to build a complete magnetic simultaneous localization and mapping (SLAM) system for multi-floor buildings, further closing the gap between outdoor and indoor navigation reliability.