How the atom went from data’s worst enemy to its best friend
By David Chandler, product marketing manager, Frequency and Timing Systems business unit, Microchip Technology

Timing from atomic clocks is now an integral part of data-center operations. The atomic clock time transmitted via Global Position System (GPS) and other Global Navigation Satellite System (GNSS) networks is synchronizing servers across the globe, and atomic clocks are deployed in individual data centers to preserve synchronization when the transmitted time is not available.
This high level of synchronization is vital to ensure the zettabytes of data collected around the globe every year can be meaningfully stored and used in many applications, whether due to system requirements or to ensure regulatory compliance. The quantum nature of an atom enables the precision time and is a critical part of ensuring that more data at faster speeds will be processed in the future — ironic, as just a few years ago the quantum nature of the atom was seen as the ultimate death of this increase in data processing and speed.
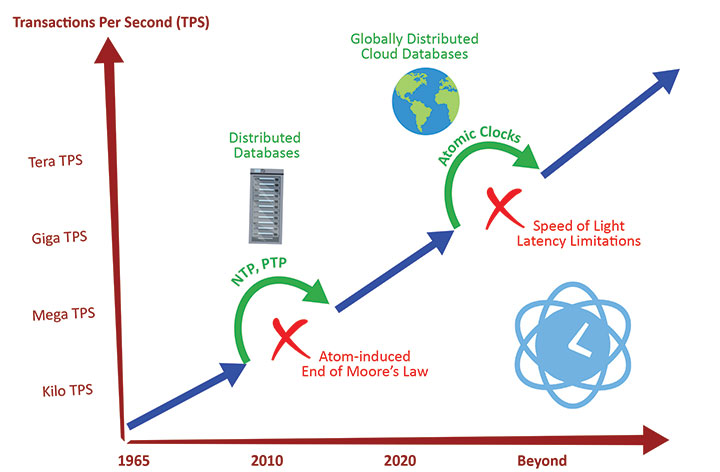
In 1965, Gordon Moore predicted the transistor count on an integrated circuit would double every year. This was eventually revised to doubling every two years. Along with this increase in transistor density came an important increase in speed as well as decreases in cost and power consumption.
It may have been hard in 1965 to imagine there would be any real-world need to have a semiconductor with 50 billion transistors on it in 2021, but as semiconductor technologies kept up with the law, so did application demands. Cell phones, financial trading and DNA mapping are all applications that rely heavily on the number of operations per second a microprocessor can execute, which is closely tied to the transistor count on a chip.
The Demise of Moore’s Law
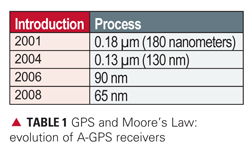
Unfortunately, Moore’s Law is rapidly coming to an end due to a limit imposed by physics. With wafer fabrication now in the sub-10-nm technology nodes, the transistor sizes are only about 10 to 50 times that of a silicon atom. At this scale, the size and quantum properties of atoms and free electrons significantly prohibit further size reduction. In essence, you could think of the atom as the ultimate court that struck down the law.
But while Moore’s Law will come to an end, the thirst for increased processing power will continue to grow. With the advent of the internet of things (IoT), streaming services, social media posts and autonomous self-driving cars, the amount of data generated every day continues to increase exponentially.
In 2021, every day an estimated 2.5 exabytes (2,882,303,761,517,120,000 bytes) was generated. Exabyte databases managing more than 100,000 transactions per second (a transaction consists of multiple operations) are currently in use, and the size of the databases and the transactions per second will continue to grow for the foreseeable future.
Synchronizing the Machines
This explosive growth in the volume of data — coupled with the speed at which the data must be written, read, copied, analyzed, manipulated and backed up — required data-center architects to find a way around the end of Moore’s Law. The architects employed horizontal scaling in a data center with distributed databases, where instead of an entire database residing on one server, the database is distributed over multiple servers in a cluster.
In this configuration, the cluster essentially functions as one giant machine, hence the size and speed of the system now becomes limited by the physical size of a data center rather than by the size of an atom. (Take that, atom!)
Software engineers now make careers writing code that enables horizontal scaling. For all the software to work, however, all the machines must be synchronized. Otherwise it violates a concept called causality.
What is causality? It is easiest to explain through an example. Suppose you have two cameras to record images for a 100-meter dash, each with its own internal clock. The first camera is at the starting blocks. The second camera is at the finish line. Both sensors are continually firing and timestamping each image with the time from their respective clocks.

To determine the official time of the winning sprinter in the race, the first camera’s images are reviewed for the point in time when the first runner left the block and this time-stamp is subtracted from the time-stamp on the last camera’s image for that runner crossing the finish line.
For this to work, both cameras must be synchronized to an acceptable level of uncertainty. If the synchronization of the clocks is only ±0.05 seconds, you would be unable to determine if someone who was recorded as running 9.6 seconds actually broke the world record of 9.58 seconds. What if they were only synchronized to ±5 seconds from the stadium clock?
Imagine this scenario: Observed from the main stadium clock, a race starts at exactly 12:00:00:00 p.m. The first runner crosses the finish line at 12:00:09:60 p.m. From the perspective of the main stadium clock, the official race time was 9.6 seconds.
But what if the first camera’s clock was exactly 5 seconds fast and the second camera’s clock was exactly 5 seconds slow? The race would officially start at 12:00:05:00 p.m and finish at 12:00:04:60 p.m. The race would officially finish 0.4 seconds before it started, the world record would be shattered, the laws of physics would be broken, and the current record holder would most likely be wrongfully dropped by all his sponsors.
Applying Causality to a Database
The same principle of causality is important in a database. Transactional record updates must appear in the database in the sequential order in which they occurred. If you count on the direct deposit of your paycheck arriving prior to having a direct withdrawal to pay your monthly mortgage, and the bank’s database did not record these in the correct sequence, you will be charged an overdraft fee. On one machine, causality errors are easy to prevent, but on multiple servers, each with its own internal clock, the servers must be synchronized and timestamp every transaction.
To achieve this, one server must act as a reference clock, much like the stadium clock, and it must distribute time to each server in a way that minimizes the time error of each server clock. The uncertainty of each timestamp (±5 seconds in the race) forms a time envelope that is twice the uncertainty of the clock (10 seconds for the race). For a distributed database, the number of nonoverlapping time-envelopes that can fit into a second should be at least on the order of the number of transactions per second expected for the system.
Probability, criticality of causality, and cost of implementation will ultimately all play a role in the final solution, but this relationship is a good starting point. A system with time-stamp uncertainties of ±1 millisecond would have time-envelopes of 2 milliseconds, and a maximum of 500 non-overlapping time-envelopes would fit in one second. This system could support approximately 500 transactions per second.
Where NTP and PTP Fall Short
Time-over-Ethernet technologies known as Network Time Protocol (NTP) and Precision Time Protocol (PTP) are used to synchronize all the servers in a distributed database in a data center. These protocols can ensure a local area network can distribute time with sub-millisecond (NTP) or sub-microsecond (PTP) uncertainties, enabling thousands (NTP) or millions (PTP) of transactions per second.
Unfortunately, even with these solutions that enabled a detour around the atom-imposed demise of Moore’s Law, physics has thrown another roadblock in the path of distributed databases in the form of the speed of light.
Imagine a well-synchronized distributed database operating with PTP in San Jose, California, happily executing 100,000 transactions per second with no causality issues. One of the database architects is sitting in his office in New York and his boss asks him to update a large series of records.
The architect wants to be able to exploit his new database to its full extent and show off the system capabilities. He plans on executing 100,000 transactions per second.
To update records per the request, he creates a simple transaction that adds the value of one record to a second record only if the value of the first record is greater than the second record. To accomplish this, he must issue a read to both records. His local machine in New York will then compare the values, then send a write command to the second record when needed.
After completing this, he then wants to execute the next transaction that compares a third value to the new sum. If the new sum is greater than the third record, then the third record is replaced with the sum. He wants to repeat this for 6 million records. Because the database is capable of 100,000 transactions per second, he thinks it will be done in roughly a minute. He tells his boss he will have the records updated in five minutes, then leaves to get a cup of coffee.
While drinking his coffee, he reads a story about how the new 100-meter dash record is negative 0.4 seconds which defies the laws of physics, and that the previous record holder is suing the stadium officials because he has lost all his endorsement money. The architect laughs to himself and thinks that the stadium should have hired him as the synchronization expert.
He comes back to his desk five minutes later and is dismayed to see that his database update has completed fewer than 1,500 transactions. He sadly realizes his mistake and prepares his résumé to send it over to the stadium, where he hopes his PTP deployment won’t have the same problem.
What went wrong? The speed of light limits the theoretical fastest possible transmission of data between New York and San Jose to 13.7 milliseconds.
The Distance Problem
Unfortunately, real world transactions are even slower. Even with a dedicated fiber-optic link between the two locations, the refractive index of the fiber, the real-world path of the fiber and other system issues make this transit time even slower. So just one transmission from New York will take 40 to 50 milliseconds to arrive in San Jose.
However, in this transaction there are four unique operations. There are two read operations, which could happen in parallel, which then have to be sent back to New York. The round trip takes 80 to 100 milliseconds. Then, once both values are compared, a write operation is issued and a write acknowledgement must be sent back indicating the write operation completed before the next transaction can start.
Suddenly, it doesn’t matter that the database can perform 100,000 transaction per second, because the distance is limiting the system to 5 transactions per second. To complete the 6 million transactions, this system would take 13 days, more than enough time for several more cups of coffee and to update a résumé. This delay is referred to as communications latency.
Circumventing Latency
But just like with Moore’s Law, database architects figured out how to circumvent latency. Database replications are created near the users, so they can work with the data without having to send signals across the country.
Periodically, the replications are compared and reconciled to ensure consistency. During the reconciliation process, the transaction time-stamps are used to determine the actual sequence of transactions, and records are sometimes rolled back when there is an irreconcilable difference such as when the transaction time-envelopes overlap. Reducing clock uncertainty reduces the number of irreconcilable differences in replicated instances, as more time-envelopes reduce the probability of overlaps. This results in higher efficiencies and lower probabilities of data corruptions.
But now the timestamping has to be accurate not only within each data center, but also between the data centers, which can be separated by thousands of miles and connected via the cloud. This is a much more difficult task, as it requires an external reference with very low uncertainly that is readily available in both locations.
Down to the Atomic Level
Enter the previous foe of the database architect, the atom. While the atom was busy repealing Moore’s Law, its subatomic particles were busy spinning. The neutrons and protons in the nucleus were rotating, while at the same time the electrons were busy orbiting about the nucleus, while also spinning on their own axes. This is analogous to Earth orbiting around the sun while simultaneously spinning on its axis.
The electrons can spin around their axes clockwise or counterclockwise. Considering there are roughly 7 octillion (7 with 27 zeros after it) atoms in a human, with all the subatomic particles spinning in our bodies, it is amazing we aren’t permanently dizzy. (Note: The subatomic particles aren’t really busy spinning and orbiting, they are really busy giving us probability wave functions and magnetic interactions that would give us results similar to what would happen if they were spinning and orbiting. But if the thought of all the spinning makes you dizzy, trying to comprehend the reality of quantum mechanics will make you positively nauseous.)
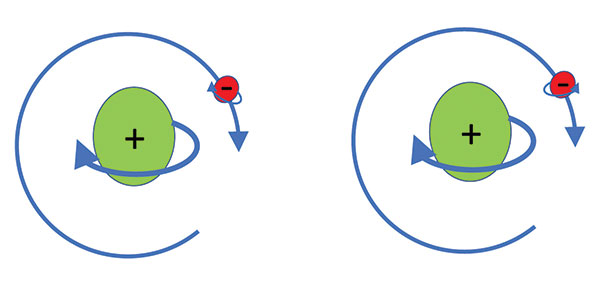
When microwave radiation at a very specific precise frequency is absorbed by an electron, the direction of spin about the electron axis can be changed. If this happened to Earth, the Sun would suddenly set in the east and rise in the west!
Atomic clocks are machines designed to detect the state of the electron spin, and then change that direction through microwave radiation. The frequency varies depending on the element, the isotope, and the excitation state of the electrons.
Once the machine determines the frequency, known as the hyperfine transition frequency, the period can be determined as the inverse of the frequency, and the number of periods can be counted to determine the elapsed time. The international definition of the second is 9,192,631,770 periods of the radiation required to induce the hyperfine transition of an electron in the outer orbital shell of a cesium atom.
Atomic clocks are the most stable commercially available clocks in the world. An atomic clock the size of a deck of cards called the chip-scale atomic clock (CSAC) will drift 1 millionth of a second in 24 hours, whereas an atomic clock the size of a refrigerator called a hydrogen maser will only drift 10 trillionths of a second in 24 hours. (Coincidentally, 10 trillionths is also about the ratio of the radius of the hydrogen atom to the height of the sprinters in the 100-meter dash and of the now-unemployed data-center architect in New York.)
With the accuracy provided by these atomic clocks, approximately 500,000 to ~50 billion non-overlapping time-envelopes can be provided for a distributed database running in data centers in Tokyo, London, New York, Timbuktu or anywhere else in the world.
Time for Distribution
How does time get to all the data centers from these atomic clocks? Universal Coordinated Time (UTC) is a global time distributed by satellites, fiber optic networks, and even the internet. UTC itself is derived from a collection of high precision atomic clocks located in national laboratories and timing stations around the world. Contributors to UTC receive a report that provides the UTC time from these clocks and their individual offset from calculated UTC. The labs and other facilities then transmit the time to the world.
The UTC report is published monthly and tells the national labs their miniscule timing offset from UTC during the previous month. Technically, we don’t know precisely what time it was up until a month after the fact. And to make things worse, extra seconds are periodically added to UTC, called leap seconds, which are inserted due to variations in the Earth’s rotation and our relative position to observable stars. While this aligns Earth to the universe, it causes havoc in data centers and 100-meter dashes.
Enter GNSS
Two common methods used by data centers to acquire UTC are via the internet using publicly available NTP time servers and via satellite using GPS or other GNSS networks. While timing through public NTP timeservers over the internet was common during early deployment of distributed databases, inherent performance, traceability and security issues have created the push to move away from this solution.
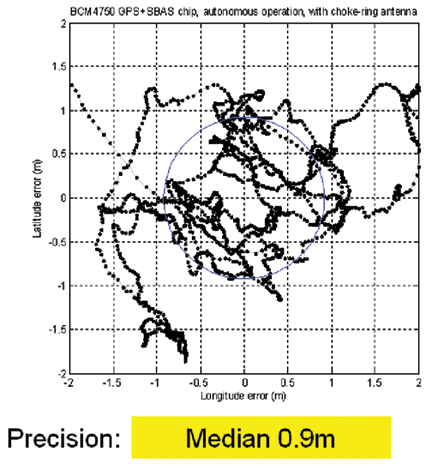
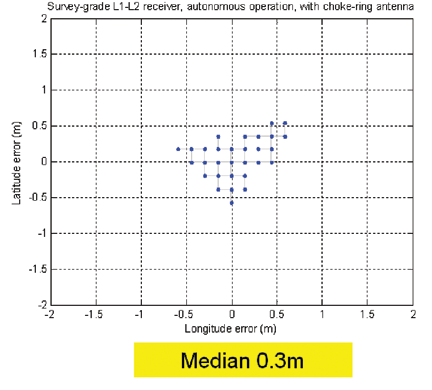
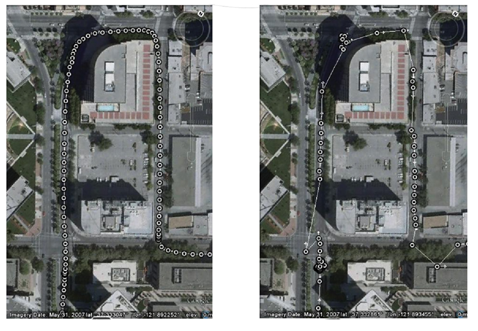
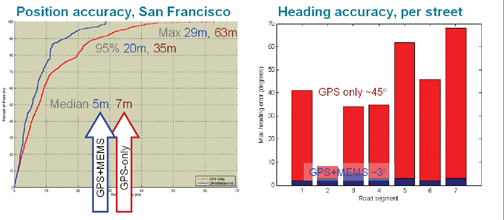
Even though GPS and other GNSS are typically thought of as positioning and navigation systems, they really are precision timing systems. Position and time at a receiver are determined by the transit time of signals traveling at the speed of light from multiple satellites to the receiver. Ironically, this is another case of a physics principle causing a problem — in this case the speed of light instead of the atom — but also contributing to the solution.
The satellites have their own onboard atomic clocks, which are synchronized to UTC that was transmitted to the satellites from ground stations. Acquiring UTC with this method can provide time uncertainties in the 5-nanosecond range, enabling 100 million time-envelopes per second.
This method is far more reliable and accurate than public NTP servers, and while these signals can be interrupted by such events as solar storms or intentional signal jamming, backup clocks that have been synchronized to the satellite signals when present can be placed in each individual data center to provide the desired uncertainty levels during these interruptions.
Next Up: Jumping Electrons
As our quest to acquire, store and transact data in the future continues to grow, novel atomic-clock technologies and time transmission systems with lower uncertainties will be needed. Currently, national timing labs are developing atomic clocks that work on the optical transitions that occur when an electron jumps orbital shells. These offer frequency stabilities to a quintillionth of a Hertz and will eventually be used to redefine the unit second.
Signal transmission through dedicated fiber-optic links or airborne lasers are already yielding improved transmission accuracy. With these continued innovations data, the atom and light will continue their complex love-hate relationship to enable ever larger quantities of data processed at ever increasing rates without consistency issues or causality casualties.