Mowi is an open-source reference design for Septentrio’s highly accurate GNSS module mosaic. It offers Wi-Fi and Bluetooth communication, which can easily be programmed for custom applications.
Septentrio, a manufacturer of high-precision GNSS positioning solutions, has added to its open-source resources for GPS/GNSS module receivers with mosaic wireless, which it calls mowi.
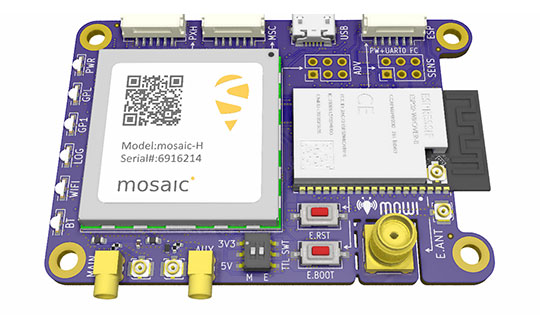
Mowi combines the Septentrio mosaic-X5 or mosaic-H module receiver with a dual-mode Bluetooth and integrated Wi-Fi from the well-known ESP32-WROVER programmable module by Espressif Systems. It is an addition to the already existing mosaicHAT board, designed on the Raspberry Pi platform.
“We are excited about the mowi project being part of the GitHub and prototyping community,” said Gustavo Lopez, market access manager at Septentrio. “The project is available as open-source, thus empowering the community to easily fit autonomous or robotic systems with communication and highly accurate and reliable GNSS positioning technology. Mowi empowers the native Ethernet features of the mosaic module, the perfect tool for fast prototyping and developing proof-of-concept projects in a simple and connected way.”
The mowi project facilitates accurate and reliable GNSS positioning for robotic and autonomous devices, on a hardware level. Numerous engineers today use the ESP32 and the multiple libraries available for internet-of-things (IoT) prototyping. The mowi board is an easy way for integrators to get started with Septentrio’s mosaic-X5 or mosaic-H heading module receivers.
The mowi board can be used on its own or plugged into a mobile computer such as Raspberry Pi or Arduino to deliver high-accuracy positioning with high update rates, suitable for machine navigation, monitoring or control. The internet connection via Wi-Fi or Bluetooth enables numerous industrial IoT applications, simplifying the connectivity to mobile data for the delivery of GNSS corrections needed for centimeter-level RTK positioning.
On top of the wireless communication, the 47.5 x 70 mm board can host IoT applications in its internal memory. It has onboard logging and exposes interfaces such as USB, serial communication and general-purpose pins. The schematic’s reference design, PCB layout and documentation are openly available for prototyping or further customization.
The mowi open-source project is available to the community on the Septentrio GitHub repository.