GeoCue Group has released a GNSS positioning system that will allow users of DJI Phantom 4 Pros and Inspire 2 drones, as well as most drones using higher end cameras, to achieve survey-level accuracy with minimum ground control.
Loki, GeoCue’s new direct geopositioning system for small unmanned aerial systems, solves the two fundamental problems associated with this technology:
Positioning Accuracy. Loki uses the new AsteRx-m2 multi-frequency, multi-constellation GNSS engine from Septentrio, which has 448 hardware channels.
Camera Events. GeoCue has invented a patent-pending method of detecting camera events from Phantoms/Inspires and synchronizing those events to GNSS positioning. No modifications to the drone are necessary; the adapter cable is “plug and play.”
GeoCue’s Loki positioning kit uses the Septentrio AsteRx-m2 GNSS engine.
Loki is a self-contained kit that provides all of the hardware and software needed to equip a drone with a post-processed kinematic (PPK) multifrequency, multi-constellation, differential, carrier-phase GNSS.
Using a local base station (not included), Loki provides centimeter-level positioning with minimal, and in some cases, no ground-control points (though GCPs are always recommended for quality assurance).
“GeoCue has been a long-time Septentrio OEM development partner,” said Neil Vancans, vice president of Septentrio Americas. “They have offered our previous generation sUAS board on their high-end AV-900, achieving remarkable results in both accuracy and reliability. By solving the problem of connecting the virtual camera trigger on DJI drones to our AsteRx-m2 GNSS engine, they can achieve professional mapping accuracies with consumer-grade UAVs.”
DroneDeploy of San Francisco has become a leader in cloud-based processing for DJI, as well as other drones. DroneDeploy has enabled users of Phantom and Inspire drones to easily upload drone images, work online with analytics, and download point clouds and orthophotos to desktops for advanced processing.
Without Loki, achieving acceptable network accuracy requires the time-consuming placement of ground-control targets throughout the mapping site.
GeoCue and DroneDeploy have been working together to ensure a smooth Loki-DroneDeploy workflow from field to finish.
“The GeoCue Loki system is an exciting product for anyone using drones to make maps with high accuracy,” said Mike Winn, CEO and co-founder of DroneDeploy. “The Loki’s combination of high-end GNSS positioning and DJI camera synchronization enables survey-grade accuracy with the simplest workflow that we’ve seen — making the Loki a great fit for the DroneDeploy platform.”
“I am very excited to be working with industry leaders such as DroneDeploy on our Loki project,” said Lewis Graham, president and CTO of GeoCue Group. “Loki provides high accuracy positional data to downstream processing solutions. More significantly, it does this for DJI Phantom 4 Pro and Inspire 2 drones. Combining DJI, Loki and cloud processing solutions such as DroneDeploy provides a very streamlined and cost effective solution for high accuracy site surveys.”
The Loki kit includes:
Loki PPK Controller using the Septentrio AsteRx-m2 GNSS engine (GPS L1, L2, L5 and GLONASS L1, L2, L3, 448 hardware channels).
Maxtena M1227HCT-A2-SMA high performance, active, multiband GNSS antenna
Antenna ground plane with mounting kit
Antenna to controller cable
USB cable for data transfer and Loki controller charging
Personality cable (user selects either DJI or DSLR)
AirGon ASP software suite
Mounting kits for DJI Inspire 2 and Phantom 4 Pro
1 year of maintenance and technical support
Loki requires a local multifrequency base station (not included but available from GeoCue). Loki is shipping to early adopter customers in August 2017. It will be available for the general market in September 2017.
It will release with direct support for DroneDeploy and AirGon’s Bring Your Own Drone (BYOD) Mapping Kit. Loki’s introductory price will be USD $4,995. GeoCue is currently accepting preorders.
Loki will be on display September 6-8 at the InterDrone 2017 conference in Las Vegas and at Commercial UAV Expo, also in Las Vegas, October 24-26. A workshop dedicated to high accuracy mapping with DJI drones using Loki is being held in conjunction with the Commercial UAV Expo. Register at www.expouav.com.
NovAtel Inc. has introduced the GPS-713-GGG-N and GPS-713-GGGL-N ATEX-qualified triple-frequency GNSS antennas with an Inmarsat rejection filter.
Based on the company’s pinwheel technology, the antennas offer multi-constellation reception of L1, L2 and L5 GPS; L1, L2 and L3 GLONASS; B1 and B2 BeiDou; as well as E1 and E5 a/b Galileo frequencies.
The GPS-713-GGGL-N also supports L-Band from 1525 to 1560 megahertz. The same antenna can be used for GPS-only, dual or triple constellation applications, resulting in increased flexibility and reduced equipment costs, the company said in a news release.
The phase center of the antennas remain constant as the azimuth and elevation angle of the satellites change. Signal reception is unaffected by the rotation of the antenna or satellite elevation, according to NovAtel. With the phase center in the same location for the GNSS signals, and with minimal phase center variation between antennas, the antenna is suitable for baselines of any length.
The rugged antenna is enclosed in a durable, waterproof housing and meets MIL-STD-810G for vibration, corrosive environment and salt fog, NovAtel says. The GPS-713-GGG-N and GPS-713-GGGL-N are similar in form factor to our other high performance GPS-700 series antennas, and bth antennas meet IEC60945 specifications.
The two antennas deliver choke-ring level antenna performance, but without the size and weight, NovAtel said. Both antennas provide enhanced Inmarsat interference rejection, which allows tracking of GNSS signals in the presence of high-powered Inmarsat transmitters that are typically found on marine vessels.
Broadcast Date: January 21, 2016 On-Demand Available Until: January 21, 2017 Sponsor:NovAtel Moderator:Alan Cameron, Editor-In-Chief and Publisher, GPS World Speakers: Mark Petovello, Professor, University of Calgary; Esther Anyaegbu, Senior Systems Architect, Intel Mobile Communications; Matthias Overbeck, Group Manager of the Precise GNSS Receiver Program at the Fraunhofer Institute for Integrated Circuits; Sandy Kennedy, Director and Chief Engineer of Core Cards, NovAtel Inc. Summary: The world of GNSS receiver design is a bit like a chocolate cake in the oven: rich, dense, and constantly expanding. To cover our topic adequately within only 60 minutes, we encompass a number of new and not necessarily related approaches and research areas. We’ll have three or four speakers, each presenting for 10 to 12 minutes, leaving a good quarter hour for your questions and their expert responses. This webinar will cover MEMS Oscillators on the Move and Optimal Search Strategies in a Multi-constellation Environment.
Broadcast Date: Thursday, March 10, 2016 On-Demand Available Until: March 18, 2017 Sponsor:Spectracom Summary: Our expert panel will cover fundamentals for good testing, case studies on specific signal simulation projects and special considerations for multi-constellation performance. Speakers: Julian Thomas, Racelogic; John Fischer, Spectracom; and John Pottle, Spirent Positioning, Spirent Federal and Spirent
Telit’s Jupiter SE873 GNSS receiver with flash memory.
Telit has introduced the Jupiter SE873, a GNSS receiver in a 7 x 7 x 1.85 mm module with serial quad I/O flash memory, an integrated low noise amplifier, SAW filter, TXCO and real-time clock.
The new addition to Telit’s GNSS portfolio is a complete multi-constellation position, velocity and time engine that the company says delivers versatile performance in harsh environments.
The Jupiter SE873 supports Assisted GPS (both autonomous and server-based) plus Satellite Based Augmentation System (SBAS), which improve Time-To-First-Fix and position accuracy. AGPS data is stored in flash memory and is available even after all power has been removed and then restored. This is especially important for battery-operated equipment, Telit said.
The SE873 is a high-performance, high-sensitivity product that supports the entire GNSS spectrum: GPS, GLONASS and BeiDou, and it is Galileo ready. It delivers simultaneous low-power tracking of GPS and GLONASS or GPS and BeiDou. In the future, users will be able to add new functionalities.
“The SE873 outperforms all its competitors, most of which are ROM based. Employing flash memory results in a module that packs a lot of functionality into a small footprint,” said Felix Marchal, CPO of Telit.
Telit Jupiter SE873 is being presented to the market at Telit DevCon 2015 Sept. 8 and CTIA’s Super Mobility Week in Las Vegas Sept. 9. Telit DevCon is a one-day event that takes place the day before CTIA Super Mobility 2015 and is located close to the Sands Expo and Convention Center in Las Vegas. Visit Telit at booth #5032 during CTIA Super Mobility 2015.
Tallysman’s compact GNSS TW1721 dual-feed embedded antenna with Accutenna technology.
Tallysman, a provider of high-performance, high-quality RF and GNSS components, has announced that its range of antennas featuring proprietary Accutenna technology is optimized for today’s multi-constellation satellite systems, including Europe’s Galileo, China’s next-generation BeiDou, GPS, GLONASS and India’s IRNSS.
Tallysman’s compact GNSS antenna range with Accutenna technology is future-proof: GNSS is changing, and an increasing number of receivers are capable of accessing multiple constellations — GPS, GLONASS, Galileo, BeiDou — but to provide the high precision these new generation of satellites enable also requires new antenna technology.
Tallysman’s proprietary Accutenna dual-feed patch technology used in the company’s wide range of GNSS antennas provides circular response over the entire antenna bandwidth, yielding superior multi-path signal rejection-low axial ratios, tight phase center variation (PCV), and a linear phase response. Single-feed patch antennas, by contrast, only provide a circular response at a single frequency and exhibit poor multipath signal rejection when receiving signals from two or more constellations. A pre-filtering option is available that gives additional protection from near out-of-band signals if required.
“Today’s wideband GNSS signals require a pure right-hand-circular response over a much wider bandwidth,” said Gyles Panther, president of Tallysman. “An inadequate phase response results in poor cross polarization suppression, which simply cannot be overcome in the GNSS receiver chip, regardless of its capabilities. Moreover, multipath interference can be expected, even in normal reception situations. Accutenna technology is a cost-effective way to ameliorate this and is particularly beneficial in situations where precision matters.”
In March, the European Space Agency launched two additional satellites (Galileo 7 and 8). Also in March, the United States launched GPS IIF-9, India launched IRNSS-1D, and China successfully launched its new generation BeiDou-3 M1. The expanding number of satellites will benefit many applications, from next-generation in-car navigation systems to coastguard search and rescue and precision agriculture, Tallysman said.
Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and multipath in their performance to GPS L1 and L5. Raw noise and multipath level of the Galileo signals is shown to be smaller than those of GPS. Even after smoothing, Galileo signals perform somewhat better than GPS and are less sensitive to the smoothing time constant.
By Mihaela-Simona Circiu, Michael Felux, German Aerospace Center (DLR), and Sam Pullen, Stanford University
Several ground-based augmentation system (GBAS) stations have become operational in recent years and are used on a regular basis for approach guidance. These include airports at Sydney, Malaga, Frankfurt and Zurich. These stations are so-called GBAS Approach Service Type C (GAST C) stations and support approaches only under CAT-I weather conditions; that is, with a certain minimum visibility. Standards for stations supporting CAT-II/III operations (low visibility or automatic landing, called GAST D), are expected to be agreed upon by the International Civil Aviation Organization (ICAO) later this year. Stations could be commercially available as soon as 2018.
However, for both GAST C and D, the availability of the GBAS approach service can be significantly reduced under active ionospheric conditions. One potential solution is the use of two frequencies and multiple constellations in order to be able to correct for ionospheric impacts, detect and remove any compromised satellites, and improve the overall satellite geometry (and thus the availability) of the system.
A new multi-frequency and multi-constellation (MFMC) GBAS will have different potential error sources and failure modes that have to be considered and bounded. Thus, all performance and integrity assumptions of the existing single-frequency GBAS must be carefully reviewed before they can be applied to an MFMC system. A central element for ensuring the integrity of the estimated position solution is the calculation of protection levels. This is done by modeling all disturbances to the navigation signals in a conservative way and then estimating a bound on the resulting positioning errors that is valid at an allocated integrity risk probability.
One of the parameters that is different for the new signals and must be recharacterized is the residual uncertainty attributed to the corrections from the ground system (σpr_gnd). A method to assess the contribution of residual noise and multipath is by evaluating the B-values in GBAS, which give an estimate of the error contribution from a single reference receiver to a broadcast correction. Independent data samples over at least one day (for GPS) are collected and sorted by elevation angle. Then the mean and standard deviations for each elevation bin are determined.
Here, we evaluate the E1 and E5a signals broadcast by the operational Galileo satellites now in orbit. In the same manner as we did for GPS L5 in earlier research, we determine the σpr_gnd values for these Galileo signals. As for GPS L5, results show a lower level of noise and multipath in unsmoothed pseudorange measurements compared to GPS L1 C/A code.
DLR GBAS Facility
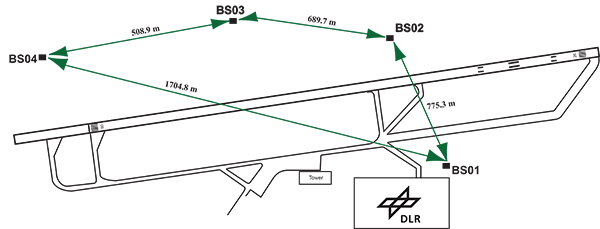
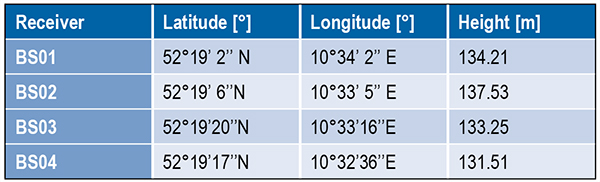
DLR has set up a GBAS prototype at the research airport in Braunschweig (ICAO identifier EDVE) near the DLR research facility there. This ground station has recently been updated and now consists of four GNSS receivers connected to choke ring antennas, which are mounted at heights between 2.5 meters and 7.5 meters above equipment shelters. All four receivers are capable of tracking GPS L5 (in addition to GPS L1 and L2 semi-codeless) and Galileo E1 and E5a signals. Figure 1 gives an overview of the current ground station layout, and Table 1 gives the coordinates of the antennas.
Figure 1. DLR ground facility near Braunschweig Airport, also shown in opening photo at left.Table 1. Ground receiver antenna coordinates.
Smoothing Techniques
The GBAS system corrects for the combined effects of multiple sources of measurement errors that are highly correlated between reference receivers and users, such as satellite clock, ephemeris error, ionospheric delay error, and tropospheric delay error, through the differential corrections broadcast by the GBAS ground subsystem. However, uncorrelated errors such as multipath and receiver noise can make a significant contribution to the remaining differential error. Multipath errors are introduced by the satellite signal reaching the antenna via both the direct path from the satellites and from other paths due to reflection. These errors affect both the ground and the airborne receivers, but are different at each and do not cancel out when differential corrections are applied.
To reduce these errors, GBAS performs carrier smoothing. Smoothing makes use of the less noisy but ambiguous carrier-phase measurements to suppress the noise and multipath from the noisy but unambiguous code measurements.
The current GBAS architecture is based on single-frequency GPS L1 C/A code measurements only. Single-frequency carrier smoothing reduces noise and multipath, but ionospheric disturbances can cause significant differential errors when the ground station and the airborne user are affected by different conditions. With the new available satellites (GPS Block IIF and Galileo) broadcasting in an additional aeronautical band (L5 / E5), this second frequency could be used in GBAS to overcome many current limitations of the single-frequency system.
Dual-frequency techniques have been investigated in previous work. Two dual-frequency smoothing algorithms, Divergence Free (Dfree) and Ionosphere Free (Ifree), have been proposed to mitigate the effect of ionosphere gradients.
The Dfree output removes the temporal ionospheric gradient that affects the single-frequency filter but is still affected by the absolute difference in delay created by spatial gradients. The main advantage of Dfree is that the output noise is similar to that of single-frequency smoothing, since only one single-frequency code measurement is used as the code input (recall that carrier phase noise on both frequencies is small and can be neglected).
Ifree smoothing completely removes the (first-order) effects of ionospheric delay by using ionosphere-free combinations of code and phase measurements from two frequencies as inputs to the smoothing filter. Unlike the Dfree, the Ifree outputs contain the combination of errors from two code measurements. This increases the standard deviation of the differential pseudorange error and thus also of the position solution.
Noise and Multipath in New GNSS Signals
GBAS users compute nominal protection levels (H0) under a fault-free assumption. These protection levels are conservative overbounds of the maximum position error after application of the differential corrections broadcast by the ground system, assuming that no faults or anomalies affect the position solution. In order to compute these error bounds, the total standard deviation of each differentially corrected pseudorange measurements has to be modeled. The standard deviation of the residual uncertainty (σn, for the nth satellite) consists of the root-sum-square of uncertainties introduced by atmospheric effects (ionosphere, troposphere) as well as of the contribution of the ground multipath and noise. In other words, these error components are combined to estimate σn2 as described in the following equation:
(1)
The ground broadcasts a value for σpr_gnd (described later in the section) associated with the pseudorange correction for each satellite. These broadcast values are based on combinations of theoretical models and actual measurements collected from the ground receivers that represent actual system characteristics. Unlike the ground, σpr_air is computed based entirely on a standardized error model. This is mainly to avoid the evaluation of multipath for each receiver and each aircraft during equipment approval.
In addition to the characteristics of nearby signal reflectors, multipath errors are mainly dependent on signal modulation and other signal characteristics (for example, power, chip rate). In earlier research, we showed that the newly available L5 signals broadcast by the GPS Block IIF satellites show better performance in terms of lower noise and multipath. This mainly results from an increased transmitted power and a 10 times higher chip rate on L5 compared to the L1 C/A code signal.
In this work, we extend this evaluation to the new Galileo signals and investigate their impact on a future multi-frequency, multi-constellation GBAS. Characterization of these new signals is based on ground subsystem measurements, since no flight data with GPS L5 or Galileo measurements are available at the moment. We assume that the improvements observed by ground receivers are also applicable to airborne measurements. This assumption will be validated as soon as flight data are available.
The measurements used were collected from the DLR GBAS test bed over 10 days (note that Galileo satellite ground track repeatability is 10 sidereal days) between the December 14 and 23, 2013. In that period, four Galileo and four Block IIF GPS satellites were operational and broadcast signals on both aeronautical bands E1 / L1 and E5a / L5.
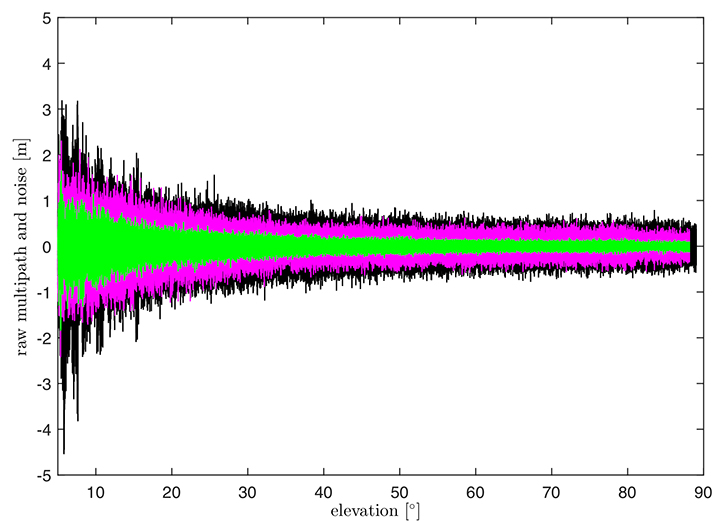
In Figure 2, the suppression of multipath and noise on the Galileo signals can be observed, where the code multipath and noise versus elevation for GPS L1 C/A BSPK(1), Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals are shown. The code multipath and noise was estimated using the linear dual-frequency combination described in equation (2), where MPi represents the code multipath and noise on frequency i, ρi the code measurement, and ϕi,and ϕj represent the carrier-phase measurements on frequencies i and j, respectively. Carrier phase noises are small and can be neglected.
(2)
Figure 2. Raw multipath function of elevation for GPS L1, Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals.
The multipath on the Galileo E1 (BOC(1,1)) signal (the magenta curve) is lower than the GPS L1 C/A (BPSK(1))(black curve), especially for low elevation, where the advantage of the E1 BOC(1,1) is more pronounced. The lower values can be explained by the wider transmission bandwidth on E1 and the structure of the BOC signal. Galileo E5a (green data in Figure 2) again shows a better performance than Galileo E1. This was expected due to the higher chip rate and higher signal power. A comparison of the raw multipath and noise standard deviations for GPS L1, L5 and Galileo E1, E5a signals is presented in Figure 3.
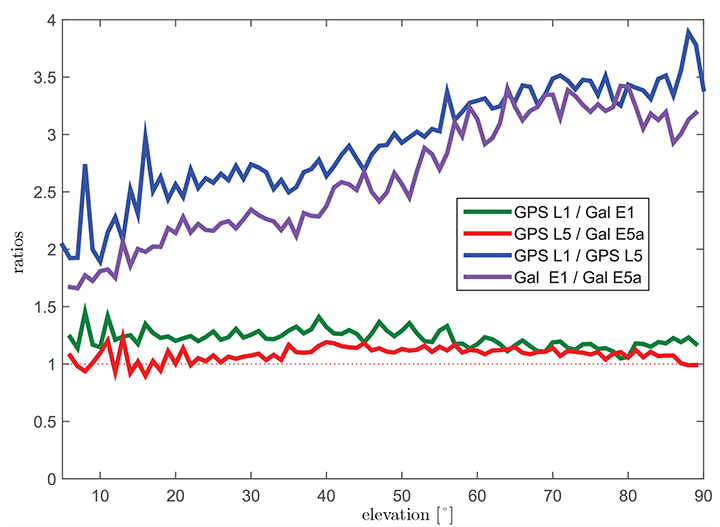
Figure 3. Ratios of the multipath and noise standard deviation function of elevation.
The curves there show the ratios of the standard deviations for each elevation bin. The values for GPS L1 are almost 1.5 times larger than those for Galileo E1 BOC(1,1) (green curve) for elevations below 20°. For high elevations, the ratio approaches 1.0. This corresponds to the observations in the raw multipath plot ( Figure 2). With the same signal modulation and the same chip rate, E5a and L5 have very similar results (red curve), and the ratio stays close to 1.0 for all elevations.
The blue and the purple curves in Figure 3 show the ratio of GPS L1 C/A (BPSK(1)) and GPS L5 (BPSK(10)), and Galileo E1 (BOC(1,1)) and Galileo E5a (BPSK(10)), respectively. The ratio of GPS L1 to GPS L5 (blue curve) increases with elevation from values around 2.5 for low elevations, reaching values above 3.5 for elevations higher than 60°. As Galileo E1 performs better, the ratio between Galileo E1 and Galileo E5a (purple curve) is smaller, from a value of 1.5 for elevations below 10 degrees to a value of 3.0 for high elevations.
Until now, we have presented the evaluation of raw code noise and multipath. However, in GBAS, carrier smoothing is performed to minimize the effect of code noise and multipath. The value that describes the noise introduced by the ground station is represented by a standard deviation called σpr_gnd and is computed based on the smoothed pseudoranges from the reference receivers. In the following section, we focus on the evaluation of σpr_gnd using different signals and different smoothing time constants. Note that, in this study, σpr_gnd contains only smoothed multipath and noise; no other contributions (for example, inflation due to signal deformation or geometry screening) are considered.
B-values and σpr_gnd
B-values represent estimates of the associated noise and multipath with the pseudorange corrections provided from each receiver for each satellite, as described in Eurocae ED-114A and RTCA DO-253C. They are used to detect faulty measurements in the ground system. For each satellite-receiver pair B(i,j), they are computed as:
(3)
where PRCTX represents the candidate transmitted pseudorange correction for satellite i (computed as an average over all M(i) receivers), and PRCSCA(i,k) represents the correction for satellite i from receiver k after smoothed clock adjustment, which is the process of removing the individual receiver clock bias from each reference receiver and all other common errors from the corrections. The summation computes the average correction over all M(k) receivers except receiver j. This allows detection and exclusion of receiver j if it is faulty. If all B-values are below their thresholds, the candidate pseudorange correction PRCTX is approved and transmitted. If not, a series of measurement exclusions and PRC and B-value recalculations takes place until all revised B-values are below threshold. Note that, under nominal conditions using only single-frequency measurements, the B-values are mainly affected by code multipath and noise.
Under the assumption that multipath errors are uncorrelated across reference receivers, nominal B-values can be used to assess the accuracy of the ground system. The standard deviation of the uncertainty associated with the contribution of the corrections (σpr_gnd) for each receiver m is related to the standard deviation of the B-values by:
(4)
where M represents the number of the receivers and N represents the number of satellites used. The final sigma takes into account the contribution from all receivers and is computed as the root mean square of the standard deviation of the uncertainties associated with each receiver (Equation 4).
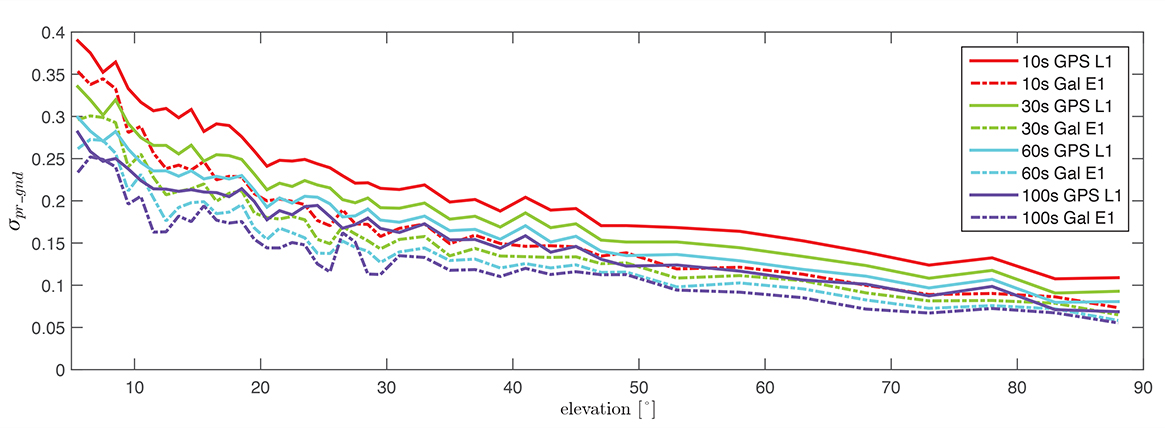
Figure 4 shows the evaluation of (σpr_gnd) for the Galileo E1, BOC(1,1) signal and the GPS L1 C/A signal for increasing smoothing time constants (10, 30, 60, and 100 seconds). Starting with a 10-second smoothing constant, Galileo E1 shows much better performance than GPS L1. The difference shrinks as the smoothing constant increases due to the effectiveness of smoothing in reducing noise and short-delay multipath. However, even with 100-second smoothing (the purple curves), Galileo E1 BOC(1,1) shows lower values of (σpr_gnd).
Figure 4. σ(pr_gnd) versus elevation for Galileo E1 (dotted lines) and GPS L1 (solid lines for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
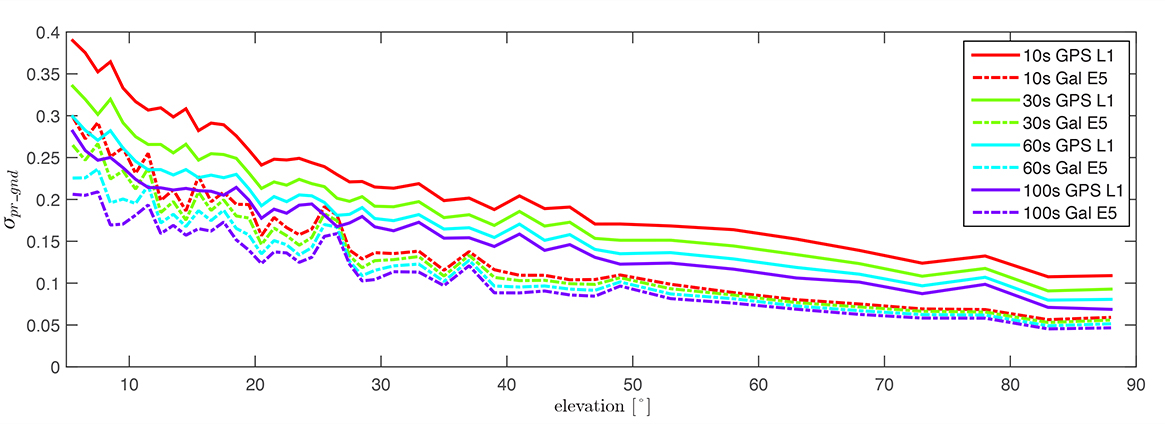
A similar comparison is presented in Figure 5, of the performance of GPS L1 and Galileo E5a. The Galileo E5a signal is significantly less affected by multipath, and the difference stays more pronounced than in the Galileo E1 – GPS L1, even with 100-second smoothing. It can be also observed that the Galileo signals have a lower sensitivity to the smoothing constant. The Galileo E1 signal shows an increase of sensitivity for low elevations (below 40°), while on E5a, a smoothing constant larger than 10 seconds has almost no impact on the residual error. Thus, a shorter smoothing constant on Galileo E5a generates approximately the same residual noise and multipath a 100-second smoothing constant on GPS L1.
Figure 5. σ(pr_gnd) versus elevation for Galileo E5a (dotted lines) and GPS L1 (solid lines) for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
The values for (σpr_gnd) are, however, impacted by the number of satellites which are used to determine a correction. Since only a very limited number of satellites broadcasting L5 and Galileo signals are currently available, these results should be considered preliminary. The first evaluations strongly indicate that with the new signals, we get better ranging performance. Based on the performance advantage of the new signals, a decrease of the smoothing constant is one option for future application. This would reduce the time required (for smoothing to converge) before including a new satellite or re-including a satellite after it was lost.
In the current GAST-D implementation, based on GPS L1 only, guidance is developed based on a 30-second smoothing time constant. A second solution, one with 100 seconds of smoothing, is used for deriving the Dv and Dl parameters from the DSIGMA monitor and thus for protection level bounding (it is also used for guidance in GAST-C). During the flight, different flight maneuvers or the blockage by the airframe can lead to the loss of the satellite signal.
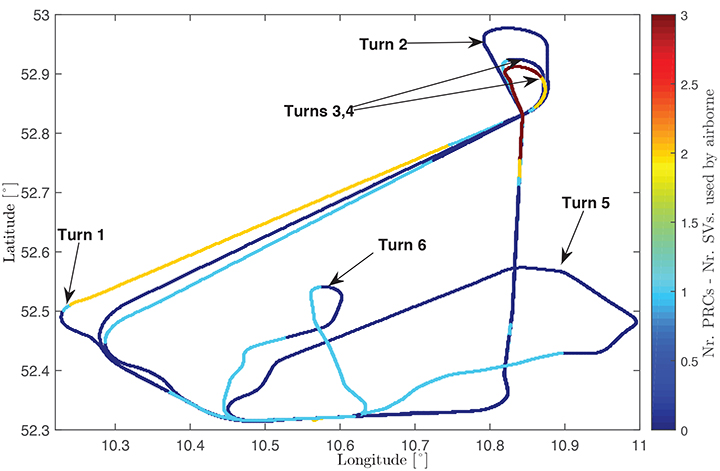
Figure 6 shows the ground track of a recent flight trial conducted by DLR in November 2014. The colors represent the difference between the number of satellites used by the ground subsystem (with available corrections) and the number of satellites used by the airborne subsystem in the GAST-D position solution. One of the purposes of the flight was to characterize the loss of satellite signals in turns. In turns with a steeper bank angle, up to 3 satellites are lost (Turns 1, 3, and 4), while on a wide turn with a small bank angle (Turn 2), no loss of satellite lock occurred. It is also possible for airframe to block satellite signals, leading to a different number of satellites between ground and airborne even without turns.
Figure 6. Ground track of a flight trial conducted by DLR. The colors represent difference between number of SVs used by the ground system and number of SVs used by the airborne.
With this in mind, a shorter smoothing constant would allow the satellites lost to turns or to airframe blockage to be re-included more rapidly in the position solution. However, a new smoothing constant would have to be validated with a larger amount of data. Data from flights trials has to be evaluated as well to confirm that similar levels of performance are reresentative of the air multipath and noise.
In a future dual-frequency GBAS implementation, an important advantage of lower multipath and noise is to improve the Ifree position solution. In earlier research, we demonstrated that the error level of the Dfree solution is almost the same as for single-frequency, but an increase in error by a factor of 2.33 was computed for the Ifree standard deviation based on L1 C/A code and L2 semi-codeless measurements.
If the errors on L1 (E1) and L5 (E5a) code and carrier phase measurements are statistically independent the standard deviation of the σIfree can be written as,
(5)
where α=1−f 21 ∕ f 25, and σL1,σL5 represent the standard deviations of the smoothed noise and multipath for L1 (E1) and L5 (E5a), respectively. Considering σpr_gnd,L1(E1)) = σpr_gnd,L5(E5a)) in equation (5), the noise and multipath error on Ifree (σIfree) increases by a factor of 2.59.
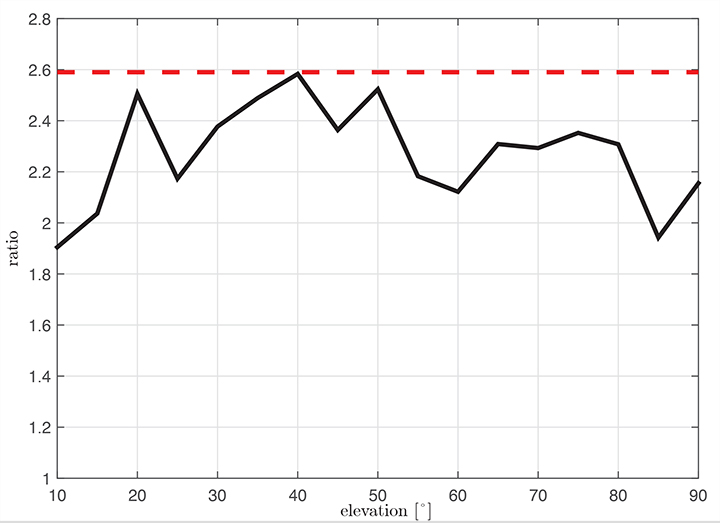
Figure 7 shows the ratio σIfree/σL1 using measured data. We observe that the measured ratio (the black curve) is below the theoretical ratio computed based on the assumption of statistically independent samples (the constant value of 2.59). This is explained by the fact that the multipath errors in the measurements are not independent but have some degree of statistical correlation. The standard deviations are computed based on the same data set used in the raw multipath and noise assessment using 100-second smoothed measurements sorted into elevation bins of 10° spacing.
Figure 7. Measured ratio σIfree/σL1 function of elevation.
Conclusion
We have shown how GBAS can benefit from the new signals provided by the latest generation of GPS and Galileo satellites. We have demonstrated improved performance in terms of lower noise and multipath in data collected in our GBAS test bed. When GBAS is extended to a multi-frequency and multi-constellation system, these improvements can be leveraged for improved availability and better robustness of GBAS against ionospheric and other disturbances.
Acknowledgment
Large portions of this work were conducted in the framework of the DLR internal project, GRETA.
Manufacturers
The ground facility consists of four JAVAD GNSS Delta receivers, all connected to Leica AR 25choke ring antennas.
Mihaela-Simona Circiu is is a research associate at the German Aerospace Center (DLR). Her research focuses on multi-frequency multi-constellation Ground Based Augmentation System. She obtained a 2nd level Specialized Master in Navigation and Related Applications from Politecnico di Torino.
MIchael Felux is is a research associate at the German Aerospace Center (DLR). He is coordinating research in the field of ground-based augmentation systems and pursuing a Ph.D. in Aerospace Engineering at the Technische Universität München.
Sam Pullen is a senior research engineer at Stanford University, where he is the director of the Local Area Augmentation System (LAAS) research effort. He has supported the FAA and others in developing GNSS system concepts, requirements, integrity algorithms, and performance models since obtaining his Ph.D. from Stanford in Aeronautics and Astronautics.
Broadcom Corporation, maker of semiconductor solutions for wired and wireless communications, has introduced a new location architecture to provide more responsive outdoor and indoor positioning capabilities for smartphone devices. With proven third-generation multi-constellation support and tight integration with sensor components and Broadcom’s connectivity sub-system, the new solution opens the door to innovative applications, such as indoor positioning and place-based mobile commerce, Broadcom said.
The architecture features a new GNSS chip that significantly reduces time-to-first-fix (TTFF) for outdoor positioning applications, cutting the time smartphone users have to wait when first checking their position, Broadcom said. The platform solution also uses data from inertial sensors, Wi-Fi access points (including those based on recently announced 5G Wi-Fi), and future technologies such as Bluetooth beacons to enable ground-breaking indoor positioning capabilities, such as “personal shopper” applications that can direct users to specific stores within shopping malls, and even specific shelves within those stores. In addition, platform integration with NFC enables smarter, more secure mobile payments, with users able to specify countries, cities or even stores where digital wallets can be used, Broadcom said.
The BCM4752 GNSS chip provides advanced multi-constellation support by simultaneously collecting data from four satellite constellations (GPS, GLONASS, QZSS, and SBAS) and using the best received signals, resulting in faster searches and more accurate real-time navigation. Building on the success of previous GNSS chips, Broadcom’s multi-constellation technology, coupled with advanced signal processing, provides faster positioning performance for improved user experience, especially in challenging urban environments where buildings and obstructions can dramatically impact accuracy and time-to-fix, Broadcom said.
The new chip and accompanying software are tightly integrated with Broadcom’s InConcert wireless connectivity sub-system, featuring the most advanced and complete technology offering in the industry. By developing its various connectivity components to operate as a unified system, Broadcom can offer more expansive location features that extend beyond GNSS capabilities, the company said.
Key Features and Benefits:
Enhances performance and reliability:
Acquisition engine with advanced multipath mitigation techniques provides faster time-to-first-fix performance in challenging environments, as well as a more accurate urban navigation experience.
Multi-constellation capability collects data from four satellite constellations (GPS, GLONASS, QZSS, and SBAS) simultaneously and uses the best received signals, resulting in faster signal searches and more accurate real-time navigation.
Low board space, power consumption, and cost:
Fabricated in 40-nm process, the BCM4752 is tiny, occupying 44 percent less board space in a device.
Integration of key components such a low noise amplifier (LNA) enables low bill of materials cost.
The BCM4752 uses 50 percent less power than previous generations, allowing location-aware applications to remain active for longer periods of time.
New applications such as geofencing that provide alerts or services based on location can be completely off-loaded from the smartphone’s CPU for ultra-low system power operation.
Opens doors to new applications, with a proven software platform capable of:
Ground-breaking indoor positioning through integration of Wi-Fi (including 5G Wi-Fi), Bluetooth low energy, NFC and handset inertial sensor data into positioning applications.
Urban navigation by applying handset inertial sensor readings into the position computation.
Assisted GNSS (AGNSS) with both GPS and GLONASS assistance data available worldwide from Broadcom’s hosted reference network.
Availability
The BCM4752 is production ready and shipping to early access partners.