OxTS has released its Georeferencer 2.5 with the anyNAV feature and eight lidar sensors from RoboSense. Georeferencer 2.5 featuring anyNAV software is suitable for survey applications.
Users of Georeferencer 2.5 with anyNAV feature enabled can boresight payloads and georeference lidar data using the user’s navigation data. The anyNAV software enables lidar surveyors to create accurate pointclouds quickly.
Georeferencer 2.5 now takes navigation data from third-party inertial navigation systems, which enables users to use that data to georeference raw lidar data from multiple sensor families. The resulting data can then be viewed in many pointcloud viewer software packages.
The realistic racetrack in the Assetto Corsa game. (Screenshot: Dronezone)
News from OxTS
The possible applications for 3D point clouds are almost endless. When you think of lidar, the mind naturally wanders to applications of the autonomous vehicle navigation or geospatial survey type. In fact, navigation and lidar data are useful for all manner of applications—including video game development.
When a new technology, such as lidar, is first brought to market, a number of factors affect its price. Initially, the cost-per-unit is likely to be high to ensure recovery of research and development costs. However, as technology ages and manufacturers innovate and bring out new versions, price invariably comes down.
As this process occurs, it puts the technology into the hands of a much wider audience, increasing the number of new and innovative use cases.
Point clouds are useful for many wide and varied applications. Autonomous vehicle developers may use point clouds to aid object detection and avoidance, while geospatial surveyors could use a point cloud to determine road degradation over time or monitor the rate of coastal erosion.
These are however some of the more common use cases. But how can navigation data be used in applications such as video game development? Let’s first look at how navigation data works alongside lidar.
Lidar and Inertial Navigation
To create a 3D point cloud, users must combine the position, navigation and timing measurements from an inertial navigation system (INS) with raw lidar data. Without accurate INS data, it is impossible to create a point cloud. This is because the lidar sensor needs to know its position in space and time and its orientation.
To avoid complicated software engineering work, simple-to-use software such as OxTS Georeferencer is available to georeference the lidar data. Once georeferencing is complete, OxTS Georeferencer will create a PCAP file that users can view in many point cloud viewer software applications.
Enter Dronezone
As lidar technology becomes more accessible, new and inventive ways to use point clouds are coming to light. OxTS partner Dronezone is one such company finding new uses for lidar.
Dronezone builds and hires out professional unmanned aerial vehicles (UAVs). They build UAV payloads with Velodyne VLP-16 lidar sensors and OxTS INS devices they sell or rent to customers.
Cover: Kunos Simulazioni
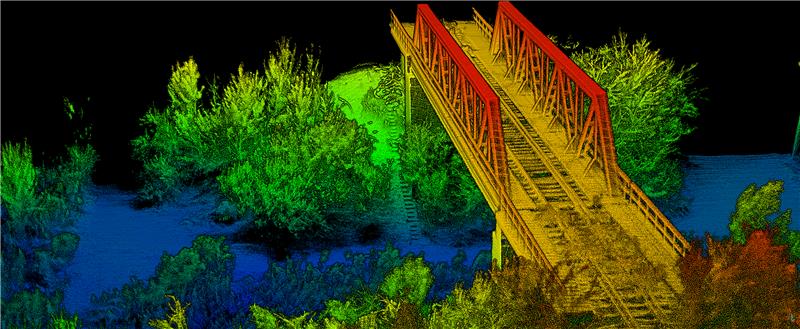
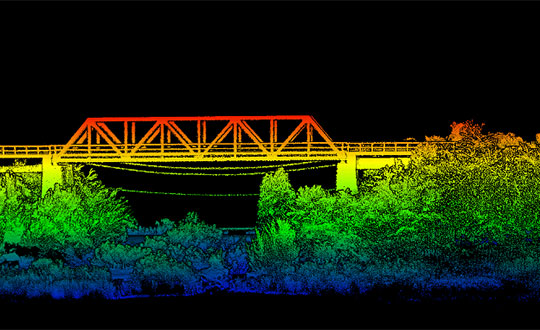
Dronezone’s customers have used the payloads for a variety of projects. One used a payload to scan an aging railway bridge looking for possible weaknesses and deterioration over time. Besides geospatial mapping projects, Dronezone is seeing an increasing need to cater to niche applications.
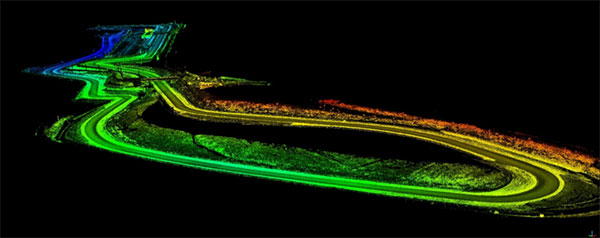
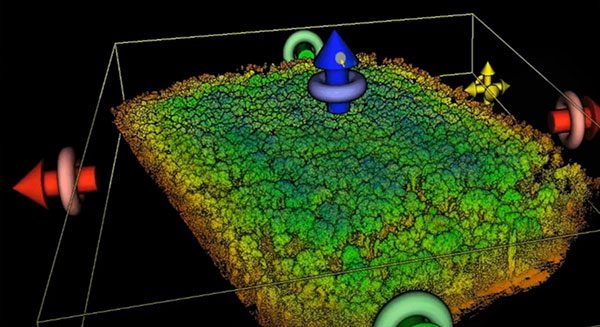
Dronezone undertook surveying the Transylvania Motor Ring racetrack for a video-game developer Kunos Simulazioni, which publishes racing simulator “Assetto Corsa.” The company wanted an accurate digital representation of the track contours. The results, which you can see in the video and screenshots, are particularly impressive.
Point cloud of the Transylvania Motor Ring. (Image: Dronezone)Point cloud of the Transylvania Motor Ring. (Image: Dronezone)
Racing Simulator
For this project, Dronezone moved away from traditional UAV-based mapping. To survey the track precisely, the company used the flexibility of its UAV payload by repurposing the hardware for use on a car. With many off-the-shelf solutions, this wouldn’t have been possible. The setup enabled Dronezone to complete multiple laps of the track and create a high-density point cloud.
“Using different components to build a UAV payload meant that Dronezone could reuse the hardware and build a different setup suitable for use on a car,” said Paris Austin, head of new product technology, OxTS. “It’s this flexibility that allows Dronezone to serve multiple applications.”
To further improve results, Dronezone used the Boresight Calibration feature within OxTS Georeferencer to calibrate the coordinate frames of the lidar sensor and INS. This process, which involves a short survey of two retro-reflective targets, increases the clarity of the final results and eliminates blurring and double vision.
The OxTS INS and lidar payload on an auto for racetrack mapping. (Photo: Dronezone)
The quality of the data produced has given Dronezone confidence it can win more business from the same customer to map further tracks for the game.
This is just one example of the new and unique applications we’re developing alongside our customers.
OxTS manufactures inertial navigation systems (INS) and proprietary software on which survey professionals have come to rely. Our devices, the Survey+ and the xNAV650, output highly accurate position, heading and pitch/roll measurements. An advanced navigation engine combines streams of data from onboard inertial measurement units (IMUs) and GNSS receivers. This data can then be used in a multitude of applications including lidar survey, mobile mapping and open road positioning.
Surveying, especially with a lidar sensor, can be a complicated art. There are many factors to consider even before you begin. However, system manufacturers involved in the survey industry, such as OxTS, are taking steps to simplify lidar survey.
The end goal for many lidar surveyors is to create an accurate point cloud. However, to produce the best possible results, the hardware and software involved must be working together in unison.
Hardware = lidar sensor and INS
Software = georeferencing, post-process and configuration
In this article, we have picked out a few of our favorite developments on the topic of simplifying lidar survey.
Research and Development
OxTS invests substantially in research and development to ensure that our hardware and software developments meet the ever-evolving demands of the survey industry. Many of the improvements generally center around improving accuracy, clarity of results and user experience. However, general industry demands also drive some development.
For example, the increasing use of drones in surveying has increased demand for smaller and lighter INS hardware. Whilst developing smaller and lighter hardware is therefore important it cannot be to the detriment of reliability and accuracy. The xNAV650 was born from this industry demand.
Although development of the xNAV650 was primarily driven by the needs of the survey industry (smaller/lighter hardware), other improvements OxTS has made to the software portfolio has focused on improving user experience.
xNAV650 and Survey+ inertial navigation systems. (Photo: OxTS)
Precision Time Protocol (PTP)
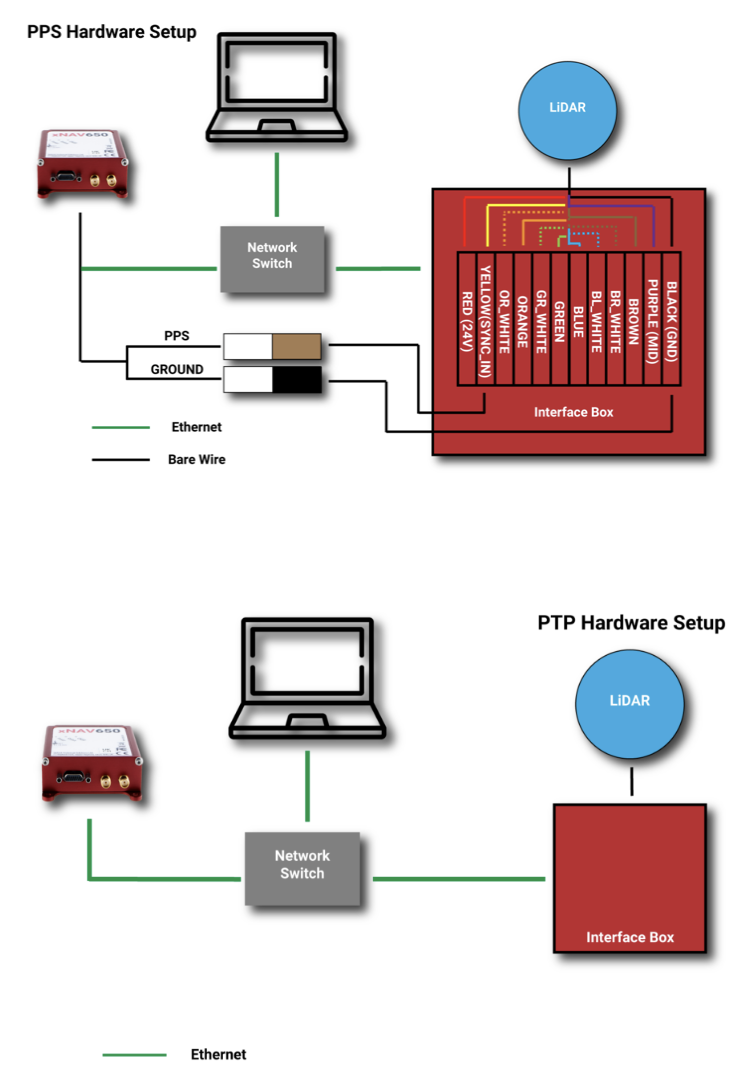
One of the major advances in OxTS INS technology over the past 12 months is PTP. The drive to include PTP capability on all OxTS Survey INS devices was the intention to help surveyors simplify the lidar survey set-up process.
When using compatible lidar sensors, such as those from Hesai and Ouster with an OxTS INS, surveyors no longer need to build complex wiring solutions. A simple ethernet ‘plug-and-play’ process is all that is required.
The images below show a traditional PPS wiring set-up vs PTP:
A traditional PPS wiring set-up vs PTP. (Image: OxTS)
Software
To get the desired outcome, an accurate georeferenced point cloud, from any lidar survey in a timely manner the software must be simple and straightforward to use. As the saying goes “complexity is the enemy of execution,” and this is what drives software development at OxTS.
Once the lidar and INS are plugged in and ready to survey, configuration should be straightforward. A simple configuration wizard, such as the one available in NAVsuite (OxTS’ complimentary software toolbox) should structure the set-up process so that nothing is missed.
NAVconfig – OxTS’ INS configuration software. (Image: OxTS)
The latest NAVsuite update (version 3.3) included a new PTP graphical user interface (GUI) to simplify survey set-up even further.
Other tools are included within NAVsuite that allow users to analyze, troubleshoot and post-process their INS data. Read the NAVsuite for Survey and Mapping infosheet to find out more about these.
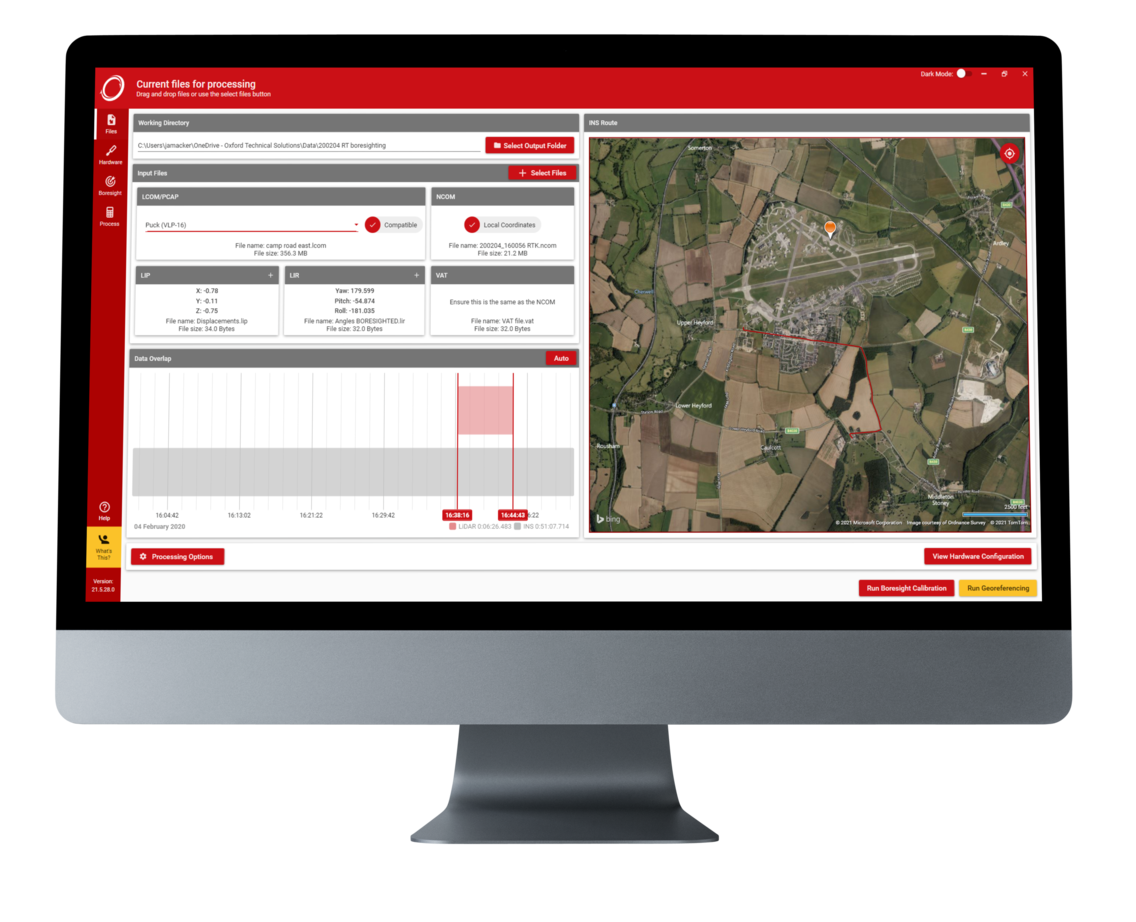
OxTS Georeferencer
OxTS Georeferencer. (Image: OxTS)
Since its launch approximately two years ago, OxTS Georeferencer has gone through some major changes. The first version included compatibility with the Velodyne VLP-16 lidar sensor. This meant that users of the VLP-16 had a quick and simple way to georeference the lidar data.
Over the course of the next 24 months, multiple new sensors have been introduced. Sensors from Hesai, Ouster, Livox and new Velodyne devices are now available, giving users more choice than ever before when it comes to choosing the hardware to do their job. Visit the OxTS Georeferencer product page for a complete list of available sensors.
Furthermore, as well as the integration of new sensors, we have introduced a raft of new features to improve the user experience for professional lidar surveyors. These include:
a 3D hardware setup viewer to enable quick and intuitive survey configuration
multiple processing options that allow users to view and process only the areas of the point cloud that are of interest therefore minimizing the data size
the ability for users to process data in a range of coordinate systems including, local coordinates, ECEF, LLA (latitude, longitude and altitude)
processing advances that enable users to process data faster than ever before.
Data-Driven Boresight Calibration
One of the most challenging parts of the lidar survey set-up process is aligning the coordinate frames of the lidar and INS devices. Failure to align these with sufficient accuracy can lead to blurring and double-vision in point clouds.
Many surveyors try to do this by eye, or by developing expensive CAD models, however there is a simpler, quicker and more cost-effective way – using data.
Built into OxTS’ lidar georeferencing software OxTS Georeferencer, there is an optional boresight calibration tool. It requires the surveyor to survey two static “targets” (see the images below) from multiple distances and angles. The data is then calibrated, and the angle displacement calculated to a tenth of a degree.
OxTS Georeferencer includes an optional boresight calibration tool. (Photos: OxTS)
Once the initial boresight calibration has taken place, if the setup is not altered in any way, the coordinate frame alignment will be valid for any future survey.
The Future
In the coming weeks and months, the development of new hardware and software features will further streamline the survey process.
OxTS Georeferencer 2.0 is now available, introducing several key improvements, particularly for professional lidar surveyors.
Version 1, introduced almost two years ago, has since been upgraded with integration of 30 new lidar sensors, as well as providing multiple user-experience enhancements.
Surveyors can use Georeferenceer alongside any OxTS inertial navigation system (INS) to quickly and easily georeference lidar data from multiple sensors to create precise 3D point clouds.
Version 2.0 highlights
Global coordinates. OxTS Georeferencer 2.0 users can now process data in a range of coordinate systems. These include local coordinates, ECEF and LLA (latitude, longitude and altitude).
New processing options. Users can maximize the usability of their point clouds and minimize data size through a range of processing options, including:
filter points by position uncertainty keeping every point within a specified accuracy
maximize the accuracy of the data while minimizing data size with a Voxel sampling algorithm
filter points by intensity, azimuth and elevation angle of the lidar
ilter points by speed and range from a vehicle.
Improvements in map file creation. OxTS Georeferencer 2.0 can add the direction from which each point is surveyed into the point cloud, allowing mesh surfaces to be easily reconstructed.
Furthermore, OxTS Georeferencer 2.0 gives surveyors the ability to add point-normal information into the point cloud and view the vehicle trajectory as a point cloud.
Processing advances. Users benefit from better performance due to revisions of the OxTS Georeferencer processing algorithms. With version 2.0, users can process point clouds faster than before and take advantage of improved precision and consistency of the boresight calibration feature, which now utilizes target dimensions.
Oxford Technical Solutions (OxTS) has launched the latest version of its lidar georeferencing software, OxTS Georeferencer 1.4.
OxTS is taking steps to improve surveyor’s user experience, streamline survey processes, and allow surveyors to get to work faster, while simultaneously improving results.
OxTS Georeferencer fuses position, navigation and timing (PNT) data from an OxTS inertial navigation system (INS) with raw lidar data to output highly accurate 3D point clouds. The software uniquely makes use of navigation diagnostic data that provides surveyors with lidar point-error estimation. This error estimation allows surveyors to focus their analysis on viewing parts of their survey based on estimated errors in points, helping them understand if there are any parts of a survey that need to be looked at again.
Rather than relying on surveyors to integrate their chosen lidar sensors themselves, OxTS has pre-integrated a number of sensors natively. Previous versions of OxTS Georeferencer integrated widely used sensors from Velodyne, Ouster and Hesai. The pre-existing integrations allow surveyors to focus on surveying rather than ensuring the two datasets work in tandem.
Version 1.4 of OxTS Georeferencer integrates new lidar sensors from Hesai. A previous version released in November 2020 was the first integration of the Pandar40P Hesai lidar. Now, seven new Hesai sensors are being integrated:
Pandar40 (beta)
Pandar40M (beta)
Pandar64 (beta)
PandarQT (beta)
Pandar128 (beta)
PandarXT-16 (beta)
PandarXT-32 (tested)
OxTS Georeferencer 1.4 also features several new developments to enhance the user experience and make it more intuitive.
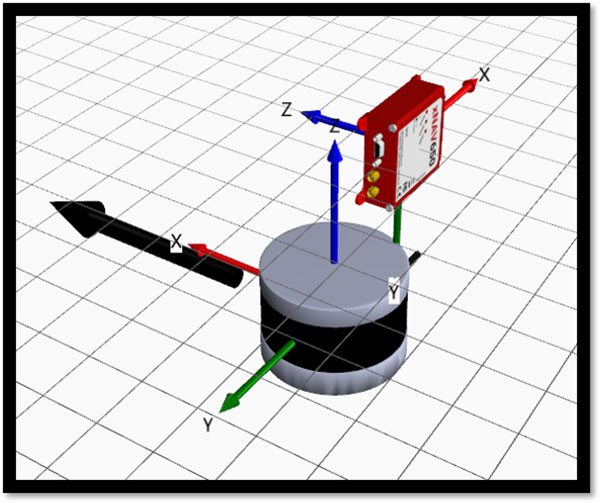
3D Hardware Setup Viewer. To help input the correct relative rotation angles, specific lidar models will be available to view depending on the surveyor’s choice of lidar. The model will represent the lidar sensor in appearance, size and orientation within OxTS Georeferencer with respect to the OxTS INS for quick and intuitive configuration.
The OxTS Georeferencer Hardware setup viewer shows the OxTS xNAV650 INS alongside a Hesai lidar sensor. (Image: OxTS)
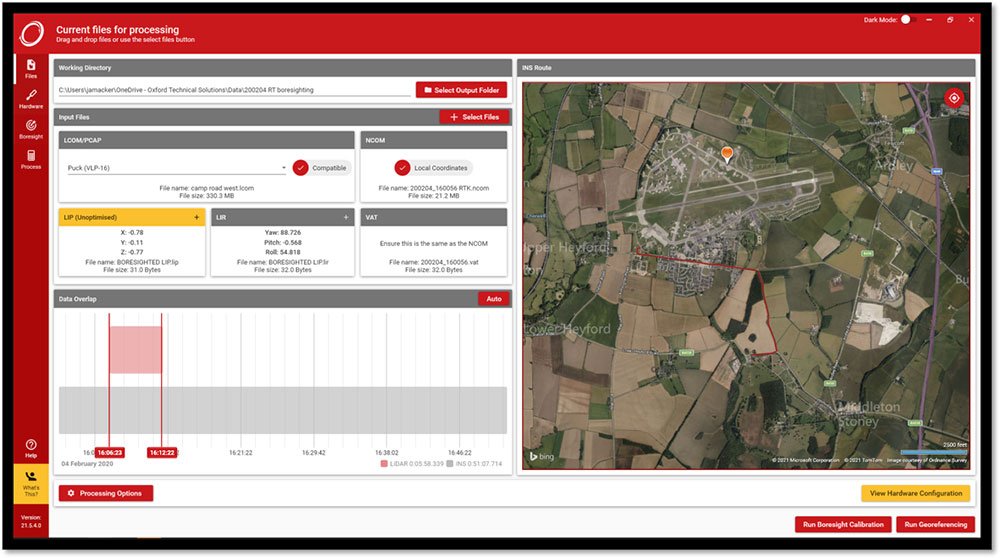
Time overlap chart. Georeferencer 1.4 reintroduces a time overlap chart that allows surveyors to visualize their survey route on a map and select specific start and end times. This enables surveyors to control the part of the route they would like to view, with the added ability to georeference only that section of the survey.
The OxTS Georeferencer time overlap chart. (Image: OxTS)
Lidar CAD models will make it easier for surveyors to calculate and input accurate LIR angles into OxTS Georeferencer, further streamlining the survey process.
The time overlap function will provide surveyors with even more flexibility — this time after the survey. Giving surveyors the ability to choose the start and end times of their survey, and therefore which part of the survey to georeference, enables full control of what to present to their peers.
These new features, coupled with those already present in OxTS Georeferencer (optional boresight calibration and point uncertainty analysis) give surveyors the flexibility and control they need to produce the best possible lidar surveys.
Oxford Technical Solutions has released the xNAV650, the latest in its line of inertial navigation systems (INS), suitable for use on drones.
INS provide surveyors with absolute position, timing and inertial measurements (heading and pitch/roll) that they can integrate into their survey projects. The measurements, when combined with data from other devices (such as lidar sensors and cameras), can greatly enhance the surveying process, leading to a greater return on investment, according to the company.
The xNAV650 is OxTS’ smallest, lightest and most affordable INS to date. It combines 20 years of navigation experience with the latest micro-electromechanical (MEMS) inertial measurement unit (IMU) technology and survey-grade GNSS receivers.
UAV Guidance
The xNAV650 provides highly accurate and reliable measurements – even when payload size and weight are imperative to consider, including for use with unmanned aerial vehicles (UAVs). It measures 77 x 63 x 24 mm and weighs 130 grams.
The xNAV650 INS is suitable for a wide range of UAV data-collection applications, including surveys of bridges, buildings, forests and rail; coastal monitoring; map creation and pipeline exploration.
OxTS’ partner Dronezone used the xNAV650 INS and a Velodyne VLP-16 lidar on a drone to conduct a scan of an aging bridge to look for structural and potential hazards from overgrown foliage.
By fusing the timing, position and inertial data from the INS with the raw data of the Velodyne VLP-16 (using OxTS’ lidar georeferencing software OxTS Georeferencer), the surveyor was able to produce a highly accurate 3D point cloud of the bridge. Fusing the position and inertial data from the xNAV650 INS with the Velodyne VLP-16 lidar data provides a high level of clarit, which can be seen in the foliage, electricity lines and side of the bridge.
The resulting point cloud has enabled the engineers to easily and accurately pinpoint areas of the bridge that need closer attention.
Side view point cloud of bridge. Data collected using and OxTS xNAV650 INS and Velodyne VLP-16 lidar. Data processed using OxTS Georeferencer. (Image: OxTS)
NAVsuite Software
Data from OxTS INS can be fused with the data from almost any lidar sensor. Using OxTS Georeferencer software, point clouds can be georeferences from lidar units specifically from Velodyne, Hesai and Ouster sensors. Work is underway to integrate new lidar sensors from an even wider range of manufacturers into OxTS Georeferencer – allowing OxTS INS users to build a full navigation solution where much of the integration work is already taken care of.
OxTS NAVsuite software is included with all OxTS INS. The full range of software tools allows users of OxTS’ devices to configure and post-process data with ease.
Other optional software features are also available, including Precision Time Protocol (PTP) and GX/IX tight-coupling technology. PTP allows for a much simpler lidar survey set-up over ethernet while simultaneously stamping out time-drift by utilizing the high-quality INS clock source – GNSS. GX/IX tight-coupling technology, OxTS’ own proprietary navigation engine, ensures that users of OxTS Inertial Navigation Systems receive the most accurate measurements possible even in tough GNSS conditions.
The OxTS Georeferencer combines INS and point-cloud data from third-party lidar sensors. (Image: OxTS)
OxTS is offering its new OxTS Georeferencer, a powerful lidar georeferencing software tool. OxTS Georeferencer combines OxTS inertial navigation data with raw lidar data to give surveyors the ability to create georeferenced point clouds along with tools to calibrate their setup and analyze the accuracy of their surveys.
Users can now combine data from their OxTS inertial navigation system (INS) with a much broader range of lidar sensors. The OxTS Georeferencer works with pointclouds from Hesai, Ouster and Velodyne lidar sensors. New sensors brought to market can be quickly and easily added to OxTS Georeferencer.
This release ensures that surveyors can easily and confidently use OxTS Inertial Navigation Systems and OxTS Georeferencer, to produce georeferenced point clouds irrespective of the LiDAR scanner they prefer to use.
The OxTS Georeferencer gives surveyors flexibility in terms of the hardware they may use to survey their environment.
Users can combine OxTS INS data with data from the following models:
Velodyne. VLP-16 Puck, Puck LITE (beta), VLP-32C (beta) and Alpha Prime VLS128 (beta). The Velodyne VLP-32C sensor is single-return mode only.
Hesai. Pandar40P
Ouster. All Ouster Gen2 lidar, The OS1 and OS2 lidar with 32, 64 and 128 lasers (all Ouster integrations, other than the OS1-64 in uniform laser distribution, are in beta.)
Features of this release include:
Improved calibration. Take advantage of a broader range of set-ups without extensive planning and set-up costs. A data-driven calibration technique helps to get the best results from your set-up. It eliminates blurring and double-vision, especially at longer distances. The new version now can calibrate angles AND linear displacements. Please note that LIP calibration is in beta.
Error estimation. Gain more control over your point-cloud. The new pointcloud error estimation uses a sophisticated formula together with OxTS navigation data diagnostics. These are then used to estimate the centimetre uncertainty in point positions. Users can then choose a maximum uncertainty to be included or remove inaccurate points.
Dual return. Provide customers with enhanced point-cloud images. The new version of OxTS Georeferencer includes dual return capability for nearly all supported models. Where available, this will give point clouds much higher definition. Users can then present enhanced point-cloud images to customers and internal stakeholders as well as service specific applications.
Easily integration of new lidar families. This latest version of OxTS Georeferencer supports the future proofing of other new LiDAR sensors. It allows users to quickly and simply add new LiDAR families to the framework. If there are any LiDAR sensors NOT currently integrated that you want to see, contact OxTS and they will consider them.
For more information on OxTS Georeferencer or to arrange a demonstration, contact OxTS – OxTS Georeferencer.