Hexagon’s Safety, Infrastructure & Geospatial division has released for Android defense applications. The platform is designed for the development of mobile applications for dismounted soldiers in the field.
With LuciadCPillar, developers can build applications with 2D and 3D views. It features military symbology and supports many geospatial data types including vector data, raster data, elevation data, point clouds and 3D meshes. It has the same capabilities found in desktops, in-vehicle and browser applications built with LuciadLightspeed, LuciadCPillar and LuciadRIA.
The platform offers capabilities to match high-resolution screens, graphic processing units and multi-core processors including the ability to display 3D data in mobile applications. LuciadCPillar supports ARM processors and an application programming interface, which aligns with the Android developer experience.
Impact, a French system integrator, partnered with Hexagon to test LuciadCPillar and will integrate it into its Delta Suite product, which is used by the French Special Operations Command.
LuciadCPillar is part of Luciad 2022.1, which is available now globally.
Cepton Inc. is working with LidarSwiss Solutions GmbH to deploy its lidar technology in a drone-based mapping and analytics solution for infrastructure management and engineering design applications.
Cepton is a Silicon Valley innovator of high-performance lidar solutions. LidarSwiss is a Switzerland-based provider of high-performance unmanned aerial vehicle (UAV) lidar solutions.
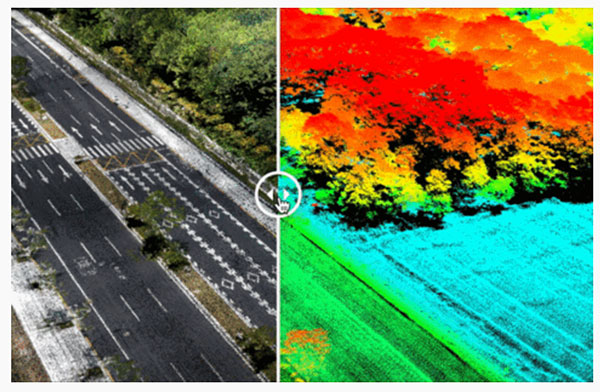
Utilizing Cepton’s Sora lidar sensor, the LidarSwiss Nano P60 system provides high-fidelity mapping and real-time processing on the fly to serve engineers, forestry managers and urban planners across the globe. To date, Nano P60 has been used to map and analyze powerlines, areas for site development, flood plains and highways in more than 20 cities in Asia, Europe and Australia.
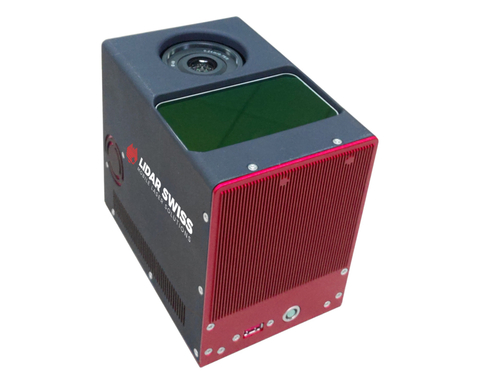
Nano P60 packages Cepton’s Sora lidar, a 42-mp camera, an Applanix IMU/GNSS and a LidarSwiss controller. (Photo: LidarSwiss)
Nano P60 integrates Cepton’s Sora sensor with a high-precision IMU/GNSS unit from Applanix and high-resolution camera system. Its intelligent controller with LidarSwiss proprietary software automatically combines all raw data to generate high-density, high-precision RGB attributed 3D laser point clouds during flight.
With a total weight of 2.1 kg, this compact system can be mounted on small UAVs to produce mapping products such as digital orthophotos, digital elevation models and 3D models, or to interface with a third-party software to enable easy, seamless solutions for all kinds of industry applications, such as digital twins, smart cities and building information modeling (BIM).
“The prominent features of the Nano P60 are its high stability, point density and intelligence,” said Robert Kletzli, LidarSwiss founder and CTO. “This lidar-enabled system addresses the critical gap of 3D accuracy with traditional camera and stereo imaging technologies. Now, instead of needing two images to see a single point and detect its elevation, Nano P60 utilizes lidar’s intrinsic 3D imaging capabilities to achieve maximized efficiency, making real-time processing and analytics possible. Cepton’s Sora lidar is among the most compact, lightweight lidar sensors that we have tested and offers an unparalleled combination of high resolution, longer range in the same category and cost efficiency. Its unique lidar architecture allows seamless integration, making Nano P60 a true plug-and-play system with solid-state reliability.”
Nano P60 combines lidar point clouds with RGB imagery to generate high-density, high-precision 3D imaging with color by elevation features. (Image: LidarSwiss)
“We are proud to be supporting LidarSwiss and its customers with our lidar technology to unlock applications such as 3D modeling for BIM, historical site mapping, terrain modeling for heavy vegetation areas, volumetric calculations for mining, power line inspection and forestry mapping,” said Klaus Wagner, director of Product Management and Marketing at Cepton. “Our Sora lidar is a one-of-a-kind line scanner that combines high frame rate and long range. Powered by Cepton’s proprietary lidar technologies, it is compact, lightweight and rotation-free, making it ideal for small UAV applications.”
Flyability has unveiled the Elios 3, a collision-tolerant drone equipped with a lidar sensor for indoor 3D mapping. The drone is powered by a new SLAM engine called FlyAware that lets it create 3D models as it flies.
It also is accompanied by a new version of Flyability’s software for inspectors, Inspector 4.0.
The launch of the Elios 3 marks a new partnership with GeoSLAM. The Elios 3 comes with an Ouster OS0-32 lidar sensor, allowing inspectors to collect data for the creation of survey-grade 3D models using software from GeoSLAM.
The drone gives users real-time digital replicas of previously inaccessible areas with the inclusion of the lidar sensor and GeoSLAM’s Connect software. The drone is protected by a cage and has advanced collision-tolerance features that allow inspectors to fly it inside dangerous confined spaces such as boilers, pressure vessels and mines.
With its integration with Connect, the Elios 3 creates survey-grade point clouds. Fitted to the back of the drone, the lidar sensor maps the environment in real time using Flyability’s FlyAware SLAM algorithm.
Survey package option
Those that need highly accurate data can upgrade to the survey package, provided by GeoSLAM, providing access to the Connect software, as well as specialist Volumes and Draw modules. Powered by GeoSLAM’s established SLAM algorithm, Connect offers a simple and automated way to process point cloud data.
Using the survey package, data is processed to an accuracy of 8 mm, suitable for mapping hazardous environments such as mines and industrial applications including chimneys, production plants, warehouses, silos and tanks. Processed data can then be viewed in the easy-to-use 3D viewer and exported to industry-standard file types including LAZ, LAS, PLY and TXT for use in third-party software.
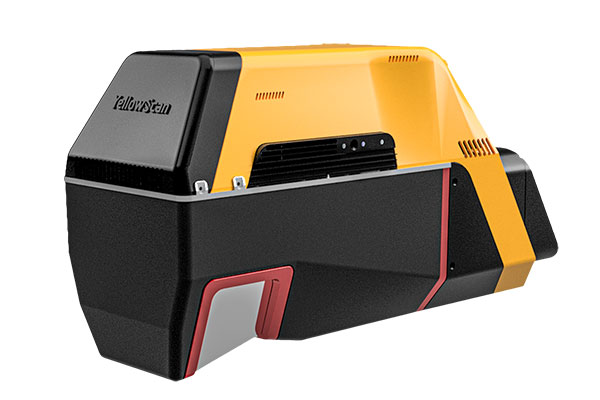
YellowScan has released a new long-range lidar scanner. Voyager is a powerful solution for both manned and unmanned aircraft.
With Voyager’s wide field of view, all of the points collected are oriented toward the ground, meaning there is no loss of points. This also means 1.5 million points per second will be usable, which would not be the case with a 360° scanner.
Voyager combines a Riegl VUX-120 laser scanner with a Trimble Applanix AP+ 50 AIR or Applanix AP+ 30 AIR GNSS-inertial board, providing precision of 0.5 cm and accuracy of 1 cm.
Voyager’s detection and processing of up to 15 target echoes per laser pulse allows for excellent vegetation penetration. Its has an extremely fast data-acquisition rate of up to 1800 kHz, suitable for projects requiring the highest point density.
The laser scanner’s specifications can be customized to fit the needs of various projects and platforms, and can be combined with YellowScan’s full suite of software solutions to easily extract, process, merge and colorize point-cloud data.
Colorization and immersive walkthroughs among major updates to geoSLAM solutions
The ZEB Vision 4K panoramic camera. (Photo: GeoSLAM)
GeoSLAM has launch the ZEB Vision 4K panoramic camera, which allows users to capture and process colorized data faster than previous company products.
The company also updated its Connect software platform. Both are designed to accompany GeoSLAM’s ZEB Horizon scanner.
With easy deployment via handheld or backpack, the ZEB Vision’s 4K resolution, 360° panoramic image capture and colorization capabilities add a new perspective to visualizing a point cloud. Images are captured simultaneously during a scan, without the need to stop and take photos.
With Connect software, data captured with the ZEB Vision can be easily colorized, without the need for third-party software.
Users can achieve greater understanding and visibility of the data capture environment with an immersive walkthrough, so they don’t have to be the person capturing the data to see it clearly.
“Being able to add context to data, through colorization and image capture, is invaluable, particularly for those working in the surveying, architecture and infrastructure sectors, where the extra details can make all the difference,” said Neil Slatcher, chief product officer, GeoSLAM.
“Our customers completely own the data and images they collect at no extra cost. We are working hard to make capturing geospatial data as easy as possible, from our walk and scan method of data collection to automated workflows. Teaming the ZEB Vision with our updated Connect software will simplify this process even further.”
Besides RGB colorization, new automation options for ZEB users include:
Automatic Data Cleaning. A range of new data filters and classifiers within Connect 2.1 provides greater point-cloud clarity by removing outliers and other unwanted points such as people and vehicles.
Measuring Tool. Distances between points within any dataset can be measured for quick and accurate analysis.
Existing GeoSLAM customers with a Care subscription can freely update to Connect 2.1; any new products shipped will come with the software, providing users will full ownership of their data.
A colorization dataset of GeoSLAM’s headquarters in Nottingham, UK, captured with a ZEB Vision camera. (Image: GeoSLAM)
A new blog offered by Inertial Labs discusses the scope of work to turn lidar point-cloud data collection into actionable deliverables. The blog, “Providing Actionable LiDAR Point Cloud Deliverables and the Inertial Labs RESEPI” by Luke Wilson, is also available as a downloadable PDF.
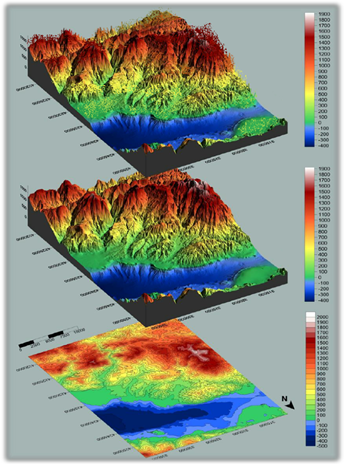
A digital terrain model, a digital surface model, and a digital elevation model (from top). (Image: Inertial Labs)
The blog introduces lidar and creation of point clouds, then discusses the use of GPS-aided inertial navigation systems (INS). “A lidar point cloud is the product of sensor fusion across a GPS-aided INS and a lidar scanner. Each sensor plays a critical role in how a lidar payload functions and the applicability of its point cloud output,” explains Wilson.
Wilson describes complications with converting datum reference frames, both traditional and reference ellipsoid such as WGS84. He also discusses projected coordinate systems. He concludes with analysis of the data using point classification — the foundation to create models including digital terrain, surface and elevation models (DTM, DSM and DEM respectively).
Finally, Wilson explains how Inertial Labs’ RESEPI is a quick and efficient way to generate models of an environment, including in fields such as construction and utility management.
RESEPI stands for REmote SEnsing Payload Instrument, Inertial Labs’ complete multiplatform, multisensor lidar and RGB payload solution for such remote sensing applications.
Trimble has introduced its SX12 Scanning Total Station, the next iteration of its 3D scanning total station that provides fast and efficient data capture for surveying, engineering and geospatial professionals.
New features include a high-power laser pointer and high-resolution camera system, expand capabilities in surveying, and complex 3D modeling. The SX12 enables enable new workflows in tunneling and underground mining, Trimble said.
The Trimble SX12 merges high-speed 3D laser scanning, Trimble VISION imaging technology and high-accuracy total station measurements into familiar field and office workflows for surveyors.
A new green, focusable Class 1M laser pointer — safe for viewing with the naked eye — offers high-power visibility and makes it easy to see at a distance. An improved camera system provides enhanced pointing and site documentation capabilities.
“The new SX12 adds more features and applications to an already widely adopted, field-proven scanning total station,” said Gregory Lepere, marketing director of Optical and Imaging for Trimble Geospatial. “The addition of a premium laser pointer completes the picture for surveyors wanting an instrument that can operate as an everyday high-end total station with the added value of scanning and imagery.”
Tunnels and underground mining
The Trimble SX12 allows users to quickly and easily operate with common survey workflows, including new versions of Trimble’s field and office software.
With Trimble Access 2021 Field Software, users can harness the full potential of the Trimble SX12, whether performing accurate measurements or comparing 3D scanning as-built data in the field. The combination is designed for infrastructure projects such as utilities, roads, rail, water, transportation and telecom.
The laser pointer enables new applications for laser-guided drilling and excavation guidance, rock bolt and blast hole set out, and as-built verification for underground tunnel and mine construction.
By integrating rich data from the Trimble SX12 into intuitive office workflows, Trimble Business Center version 5.40 enables users to quickly create complete customer deliverables. With its enhanced point-cloud management, eCogAI automated information extraction, and interoperability to leading CAD and GIS packages, the solution empowers users to exceed even the toughest client demands.
The combination also enables the capture of tunnel point clouds for as-built comparison, automated tunnel extraction routines and detailed 3D mesh inspection resulting in intuitive reporting deliverables for construction verification.
“Tunneling projects are highly dependent on accurate positioning to precisely control equipment and track progress in difficult underground construction environments,” said Boris Skopljak, marketing director of Monitoring and Tunneling for Trimble Geospatial. “The combination of the SX12 and new software workflows, simplifies the capture of site conditions, enabling tunneling and mining surveyors to make accurate and informed decisions without the complexity and additional cost of multiple systems.”
The OxTS Georeferencer combines INS and point-cloud data from third-party lidar sensors. (Image: OxTS)
OxTS is offering its new OxTS Georeferencer, a powerful lidar georeferencing software tool. OxTS Georeferencer combines OxTS inertial navigation data with raw lidar data to give surveyors the ability to create georeferenced point clouds along with tools to calibrate their setup and analyze the accuracy of their surveys.
Users can now combine data from their OxTS inertial navigation system (INS) with a much broader range of lidar sensors. The OxTS Georeferencer works with pointclouds from Hesai, Ouster and Velodyne lidar sensors. New sensors brought to market can be quickly and easily added to OxTS Georeferencer.
This release ensures that surveyors can easily and confidently use OxTS Inertial Navigation Systems and OxTS Georeferencer, to produce georeferenced point clouds irrespective of the LiDAR scanner they prefer to use.
The OxTS Georeferencer gives surveyors flexibility in terms of the hardware they may use to survey their environment.
Users can combine OxTS INS data with data from the following models:
Velodyne. VLP-16 Puck, Puck LITE (beta), VLP-32C (beta) and Alpha Prime VLS128 (beta). The Velodyne VLP-32C sensor is single-return mode only.
Hesai. Pandar40P
Ouster. All Ouster Gen2 lidar, The OS1 and OS2 lidar with 32, 64 and 128 lasers (all Ouster integrations, other than the OS1-64 in uniform laser distribution, are in beta.)
Features of this release include:
Improved calibration. Take advantage of a broader range of set-ups without extensive planning and set-up costs. A data-driven calibration technique helps to get the best results from your set-up. It eliminates blurring and double-vision, especially at longer distances. The new version now can calibrate angles AND linear displacements. Please note that LIP calibration is in beta.
Error estimation. Gain more control over your point-cloud. The new pointcloud error estimation uses a sophisticated formula together with OxTS navigation data diagnostics. These are then used to estimate the centimetre uncertainty in point positions. Users can then choose a maximum uncertainty to be included or remove inaccurate points.
Dual return. Provide customers with enhanced point-cloud images. The new version of OxTS Georeferencer includes dual return capability for nearly all supported models. Where available, this will give point clouds much higher definition. Users can then present enhanced point-cloud images to customers and internal stakeholders as well as service specific applications.
Easily integration of new lidar families. This latest version of OxTS Georeferencer supports the future proofing of other new LiDAR sensors. It allows users to quickly and simply add new LiDAR families to the framework. If there are any LiDAR sensors NOT currently integrated that you want to see, contact OxTS and they will consider them.
For more information on OxTS Georeferencer or to arrange a demonstration, contact OxTS – OxTS Georeferencer.
GeoCue Group has released the True View 615 and True View 620 UAS lidar 3D imaging systems. The True View systems are compact, survey-grade 3D imaging sensors designed for small unmanned aerial systems.
True View 615 and 620 are equipped with Riegl’s miniVUX-2UAV laser scanner integrated with dual photogrammetric cameras. Position and orientation is provided by an Applanix APX-15 (True View 615) or extreme accuracy APX-20 (True View 620).
All True View 3D imaging systems are bundled with Applanix POSPac, True View EVO post-processing software and True View Reckon data management solution.
The Riegl laser scanner and dual photogrammetric cameras have been carefully configured to provide a fused lidar/imagery field of view of up to 120°. The system includes full post-processing software that generates a stunning ray-traced 3D colorized point cloud and geocoded images.
An upgrade path will be available to promote a True View 615 to a True View 620 by adding the Applanix APX-20 external inertial measurement unit.
The True View product line gives mappers and surveyors the ability to deliver high-quality analytic data with exact accuracies. These deliverables are generated using workflows and tools within GeoCue’s post-processing software, True View EVO. Examples of derived products include bare Earth models, profiles, cross sections, topographic contours, volumetric analysis and more.
“Our Quanergy-based True View 410 has rapidly become the standard for general purpose drone 3D Imaging, where moderate vegetation penetration and accuracies of 5 cm RMSE are adequate,” said GeoCue’s President, Lewis Graham. “The True View 615/620 provides a solution for situations where deeper vegetation penetration, wire extraction and extreme accuracy are required. These are great new additions to the True View product line.”
The True View 615/620 will be available for shipment late June.
By Daniela E. Sánchez, Harvey C. Gómez and Thomas Pany, Institute of Space Technology and Space Applications (ISTA)
This paper presents how our system, consisting of a GNSS receiver antenna, an inertial measurement unit (IMU) and a lidar, is used to obtain high-precision maps through the geo-referencing of lidar point clouds. An accuracy assessment of the system is conducted, which also gives us insights on the quality of lidar range measurements for autonomous driving applications.
The assessment is done by geo-referencing the obtained point clouds of extracted buildings and comparing them against a supporting measuring system like a total station. The building extraction is done by performing an approximation of the mathematical model of a plane to the facades that composes the building in both, the lidar and the supporting measurement system data.
The paper also indicates the proposed pose determination method of a mobile agent using lidar data. Thanks to the advantages of active, 3D sensors, diverse objects in the environment can be detected as individual point sets, or clusters. Each of the segmented objects can be used as a landmark to figure how the agent is located with respect to those structural elements. The algorithm is capable of detecting the clusters in one point cloud, and finding the most alike point set on a subsequent scan. This is achieved by comparing global descriptors for point cloud data.
The Ensemble of Shape Functions (ESF) is selected as the cluster descriptor. The cluster matching is performed by comparing the clusters one-to-one, calculating the minimum Chi-squared distance among their descriptors. The smaller this distance, the greater the probability of being the same cluster in distinct epochs.
Figure 2. Direct geo-referencing of lidar data at different times. (Image: Authors)
The resultant cluster correspondences for the whole point cloud allow finding the rigid transformation between the point clouds. An initial coarse alignment among the clouds based on the centroids of each matched cluster was performed, followed by a fine alignment in order to reduce errors by the use of the Iterative Closest Point (ICP) algorithm. This approach is valid for urban environments, or for those where many objects can be segmented as clusters.
Finally, a practical case is described in order to show how we plan to use the outcome of the highly precise geo-referenced point clouds and the pose estimation method using lidar.
The latest software release for the SLAM-based NavVis M6 Indoor Mobile Mapping System (IMMS) automatically detects and removes point cloud artifacts, including moving objects in static scenes, the company said.
This image shows what an object looks like where the laser beam has hit an edge, before and after the algorithm has been applied. (Image: NavVis)
NavVis is a global provider of indoor spatial intelligence solutions. The latest IMMS release removes artifacts from point clouds during the post-processing of scan data.
Fringe points and dynamic objects are two common types of point cloud artifacts that affect all 3D laser scanning devices. Fringe points arise when a laser beam hits the edge of an object as well as its background. This scattered beam ultimately appears as a “fringe” around the edge of the object in the point cloud.
The second type of point cloud artifact results when dynamic objects, such as humans walking through a scan, are captured by the laser scanner and then appear as artifacts in the point cloud.
A point cloud before and after the algorithm has been applied to a dynamic object. (Image: NavVis)
According to the company, the NavVis M6 IMMS is a simultaneous localization and mapping (SLAM)-based system that uses laser scanners to capture a high volume of measurement points of an environment. As SLAM-based mobile mapping systems move through the environment while scanning it, objects are observed from multiple different angles and positions.
With the latest software update, the algorithms applied during the post-processing of scan data use those multiple observations to detect whether measurement points actually exist in the physical space. If it is determined that the point does not exist and is instead resulting from the laser beam hitting an edge or an object moving through the space, this point is automatically removed.
The result is a much cleaner, crisper point cloud that requires less clean up time in point cloud editing software and that is easier to use for applications such as BIM modeling, the company said.
“We have been working hard to develop a very precise SLAM technology that significantly improves the quality of point clouds captured by a mobile device,” said Georg Schroth, NavVis co-founder and CTO. “As this latest software feature shows, SLAM offers a lot of potential for laser scanning and AEC professionals who are looking for technology that not only speeds up the capture of data but also delivers high quality point clouds. We see a lot of potential in this technology and look forward to sharing future innovations.”