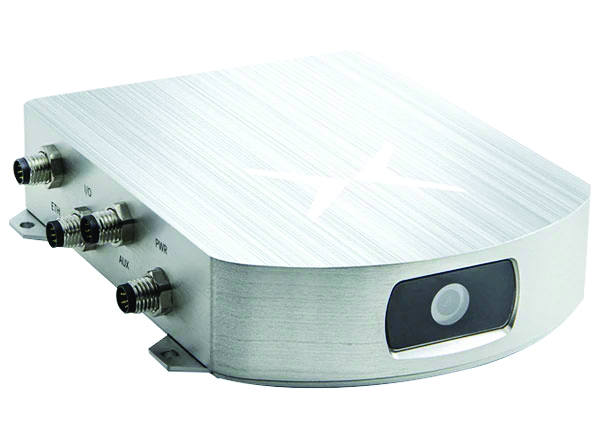
GNSS interface board – mosaic. (Image: Point One Navigation)
Point One Navigation and Septentrio have partnered to expand upon the companies’ precision location solutions throughout Western Europe. The new developer compatibility is suitable for demanding applications, including industrial autonomy, precision agriculture, logistics and delivery, robots and autonomous vehicles.
Point One’s Polaris is a correction network that enables high-precision GPS and computer vision-based localization. Polaris has recently extended coverage to now include Western Europe, further expanding the reach of the network. This solution is powered by Septentrio’s GNSS receivers, including the mosaic compact multi-constellation GNSS receiver.
The mosaic module — a multi-band, multi-constellation receiver in a low-power surface-mount module with a wide array of interfaces — is designed for mass market applications such as robotic and autonomous vehicle guidance systems. The module integrates GNSS and RF ASIC technology, as well as the robust positioning engine from Septentrio.
Septentrio real-time kinematic (RTK) receivers can be used directly with Polaris to provide centimeter-level accuracy in seconds.
This technology is complemented by Point One’s FusionEngine software, which further integrates cameras and additional sensors to achieve the desired level of precision — even in the complete absence of satellite signals.
FusionEngine has the accuracy and the resilience to inclement weather required by Level 2 applications, such as highway lane keeping and V2X, while offering the robustness necessary for mission-critical Level 4 and Level 5 robotaxi and full autonomy applications.
Septentrio, a leader in high-precision GNSS positioning solutions, has launched the Agnostic Corrections Partner Program.
The program facilitates the use of Septentrio receivers with high-accuracy services that provide varying levels of accuracy, coverage and delivery methods. This also allows users to select the service that suits specific applications and business models.
The Agnostic Correction Partner Program, which includes Polaris from Point One, Skylark from Swift Navigation, and PointPerfect from u-blox, provides documentation for the use of Septentrio receivers with these high-accuracy services.
Agnostic GNSS corrections refer to correction services that are not specific to a particular GNSS receiver or device. It provides correction data that can be used by any receiver that can process the correction signal. Agnostic corrections are useful in situations where multiple types of GNSS receivers are being used, such as in a large-scale surveying project or in a fleet of vehicles that use different types of navigation systems.
A roundup of recent products in the GNSS and inertial positioning industry from the February 2023 issue of GPS World magazine.
SURVEYING & MAPPING
GPSMAP 64csx handheld GPS receiver (Image: Gamin)
Handheld GPS With navigation sensors and camera
The GPSMAP 64csx handheld GPS receiver comes with multi-GNSS support, TopoActive mapping, barometric altimeter, three-axis compass, and wireless connectivity via Bluetooth and ANT+ technology. It also has an 8 MP autofocus camera. The GPSMAP 64csx is built to withstand rugged terrain and is water-resistant. The highly sensitive receiver and quad helix antenna provide support from GPS, GLONASS and Galileo. Preloaded TopoActive maps include waterways, natural features, buildings and international boundaries. It is compatible with smartphones so users can receive email and text messages and share location data with others. Garmin, garmin.com
The Venus Laser RTK receiver comes with an inertial measurement unit. It can be used in its traditional mode with a range pole, or in laser mode without a pole, enabling GNSS surveying beyond typical limitations. In traditional mode, it has tilt compensation of up to 60° with an accuracy of 2.5 cm; in laser mode, it has the same tilt compensation but an accuracy of 5.5 cm. The receiver is powered by a SinoGNSS K8 high-precision module capable of up to 1,590 channels. It can survey using GPS, BDS-2, BDS-3, GLONASS, Galileo, QZSS and SBAS constellations. Other features include Bluetooth connectivity, more than 20 hours of battery life, and ruggedness (it is dust and waterproof and is designed to survive a two-meter drop). ComNav Technology Ltd., comnavtech.com
Leica iCON gps 160 (Image: Leica Geosystems)
Smart Antenna With features to increase productivity on the construction site
The Leica iCON gps 160 is a next-generation construction smart antenna designed to increase productivity in stakeout and measurement applications on the jobsite. It features a large color display with clear navigation for quick and easy setup without additional hardware. It is optionally available with an inertial measurement unit (IMU) for tilt-compensation functionality up to 20°. It seamlessly integrates with all Leica iCON construction instruments and controllers as well as the iCON field software for precise, real-time verification. Leica Geosystems, leica-geosystems.com
The Xsens Vision Navigator (Image: Movella)
GNSS inertial navigation Integrates position inputs from three high-accuracy sources
The Xsens Vision Navigator integrates position inputs from three high-accuracy sources including dual-antenna real-time kinematic (RTK) GNSS receivers; an inertial measurement unit (IMU) incorporating a three-axis accelerometer, a gyroscope and magnetometer; and a visual inertial odometry system. It can optionally accept input from an external wheel-speed sensor. The positioning sensor achieves centimeter-level accuracy when operating in GNSS mode with an RTK fix. When GNSS signals are not available, the product alone achieves accuracy of 2% of travel distance, or 0.75% when supplemented by wheel speed. Xsens Vision Navigator is suitable for outdoor positioning applications such as material handling equipment, commercial and specialist vehicles, last-mile delivery, inspection equipment and UAVs, agricultural equipment, mining equipment and utility robots. Movella, movella.com
SILC Eyeonic Vision System (Image: SiLC)
Coherent Vision Solution Delivers high levels of vision perception
The Eyeonic Vision System is a frequency-modulated continuous wave lidar solution, which delivers high levels of vision perception to identify and avoid objects with low latency. At the core of the Eyeonic Vision System is a fully integrated silicon photonics chip. It provides more definition and precision than legacy lidar solutions, with roughly 10 milli-degree of angular resolution coupled with millimeter-level precision. These features enable this solution to measure the shape and distance of objects with high-precision and at a large distance. The system combines the Eyeonic Vision Sensor and a digital processing solution based on a powerful field-programmable gate array. The flexible architecture enables synchronization of multiple vision sensors for unlimited points per second.
SiLC, silc.com
OEM
The SYN4778 (Image: Synaptics)
Integrated Circuit Designed for the internet of things
The SYN4778 is a small, low-power GNSS integrated circuit designed to extend battery life, reduce product size, and enhance performance of advanced location-based services for internet of things (IoT) devices — wearables, mobile accessories, asset trackers, UAVS and transportation devices. It includes advanced multipath interference mitigation using L5-band signals from GPS, Galileo, BeiDou, NAVIC, SBAS and QZSS. The chip also uses the L1 satellite band to reduce both the time to first fix, and the power consumed, improving the end-user experience and enabling product developers to add additional functionality and features to their IoT devices. Synaptics, synpatics.com
The Boreas D70 is a fiber-optic gyroscope (FOG) inertial navigation system (INS), part of the Boreas digital FOG series. The technology is suited to surveying, mapping and navigation across subsea, marine, land and air applications. It also could be adopted for vehicular applications, including autonomous vehicles and aircraft where weight and size are at a premium. The Boreas D70 combines closed-loop DFOG and accelerometer technologies with a dual-antenna real-time kinematic (RTK) GNSS receiver. These are coupled with an artificial-intelligence-based fusion algorithm to deliver accurate and precise navigation. Advanced Navigation, advancednavigation.com
The u-blox NEO-F10T (Image: u-blox)
Timing Module Dual-band and secure for 5G communications
The u-blox NEO-F10T offers nanosecond-level timing accuracy, meeting the stringent timing requirements for 5G communications. It is compliant with the u-blox NEO form factor (12.2 mm x 16 mm), allowing space-constrained designs to be realized without the need to compromise on size. The NEO-F10T is the successor to the NEO-M8T module, providing an easy upgrade path to dual-band timing technology. This allows NEO-M8T users to access nanosecond-level timing accuracy and enhanced security. u-blox’s dual-band technology mitigates ionospheric errors and greatly reduces timing error, without the need for an external GNSS correction service. u-blox, u-blox.com
TRANSPORTATION
SafePilot P3 (Image: Trelleborg)
Maritime Systems Provides data on vessel positioning
The SafePilot P3 navigation system provides real-time data on vessel positioning and movement in tight waterways. It uses motion sensors and two GNSS antennas to measure the position and heading of vessels in three dimensions, minimizing time and difficulty associated with piloting procedures. SafePilot P3 has a backup battery to maintain functionality in the event of a power outage. This navigation system improves situational awareness while navigating waterways and ports globally, and also enhances communication between the captain, pilot, tug operators and canal personnel while vessels are transiting a canal and approaching a port.
Trelleborg, trelleborg.com
FusionEngine software (Image: Point One Navigation)
Positioning Engine Assures functional safety of ASIL-B
FusionEngine software, which is rated for automotive safety integrity level (ASIL), is now compatible with STMicroelectronics’ Teseo ASIL Precise Positioning GNSS chipset TeseoAPP. This assures functional safety of ASIL-B, a requirement for Level 3+ advanced driver assistance systems (ADAS). It can be integrated into several different host processors to enable high-level ADAS and autonomous driving systems. The combination of TeseoAPP’s receiver and the STA5365S external RF front-end provides dual-band measurement data for all visible GNSS satellites to the main host processor into which
FusionEngine is integrated. Point One Navigation, pointonenav.com
Ghost Autonomy Engine (Image: Ghost)
Autonomous driving software for level 4 driver assistance
The Ghost Autonomy Engine achieves the reliability required to bridge the gap between driver assistance capabilities L2 or L2+, and self-driving that does not rely on a human backup (L4). The software provides a stereo-vision neural network that delivers per-pixel depth in real time. It is capable of detecting and segmenting key features in a scene without needing to classify or recognize them. The physics-based perception system can handle the long tail of obstacles on the road, even those never seen before. Ghost, ghostautonomy.com
Vista-X120 Plus (Image: Cepton)
Lidar Provides 3D perception
The Vista-X120 Plus is a slim automotive lidar device for real-time adaptive 3D perception for advanced driver assistance. Its software-definable region of interest enables higher dynamic perception capabilities, while an adjustable central field of view with increased angular resolution improves accuracy in detection and classification of objects when driving. The region of interest is also configurable in real time in both horizontal and vertical directions. The Vista-X120 Plus is compact at 140 mm x 30 mm, improving OEM integration and placement options without disrupting vehicle appearance. Cepton, cepton.com
IIM-42653 and IIM-42652-I sensor platforms (Image: TDK Corporation)
Sensor Platforms Targets industrial and navigation applications
The IIM-42653 and IIM-42652-I sensor platforms consist of 6-axis IMUs, which target industrial and navigation applications requiring high force sensitive resistor (FSR) performance or inertial navigation software. The IIM-42653 platform — a robust, low-noise, low-power, 6-axis IMU — is capable of a gyro-programmable output of 4,000 dps and an accelerometer-programmable output of 32 g. These features make the IIM-42653 suitable for industrial-grade or high-end automated guided vehicles, automated mobile robots and unmanned aerial vehicles. The IIM-42652-I platform offers hardware authentication and can be integrated with TRACK dead-reckoning software from Trusted Positioning. TRACK filters GNSS multipath errors and provides a continuous navigation solution when GNSS signals are unavailable. TDK Corporation, invensense.tdk.com
VO Max 4T (Image: Autel Robotics)
Flight Platform
For enterprise and professional applications
The EVO Max 4T autonomous flight platform provides omnidirectional obstacle avoidance and tri-anti-interference capability to ensure flight safety and stability in high-interference environments. It is equipped with three high-quality cameras including a 48 MP telephoto camera, a 50 MP wide-angle camera and an infrared camera. The platform has a range of navigation and data-acquisition functions, including 3D flight routes, PinPoint Mode, Team Work, Polygon Mission, Waypoint Mission and Oblique Photography. EVO NEST is a base for automatic take-off, landing, charging and mission planning for EVO series UAVs. It is designed for all-weather operation and can be easily transported. Autel Robotics, autelrobotics.com
Douglas County Public Works needed a GNSS rover to support its UAS operations. The pay-as-you-go option was appealing as they only needed high-precision a few times per month. (Image: Jason Schilling)
High precision GNSS rovers play a vital role in a broad variety of field surveying and mapping applications. Different users have different value propositions in mind when choosing field hardware and software: expected precision, sources of corrections, configurations for specific workflows, and, of course, cost. Weighing these many considerations, GNSS manufacturers have come up with portfolios of multiple models to fill these varied needs.
That said, GNSS manufacturer Bad Elf took a different approach when it designed its flagship rover, the Bad Elf Flex. The Flex is designed to meet the cost-precision-workflow needs of everyone, from asset mappers to surveyors. (Hence the name “Flex.”) To inform the design of the Flex, Bad Elf listened to field users who wished for a scalable solution in a single rover, rather than having to buy multiple different models, and without breaking the bank.
Options for the Infrequent User
“I had one of the little Bad Elf GNSS surveyor handhelds for many years,” said Jason Schilling, wildlife biologist with Douglas County Public Utility District in central Washington State. “That worked great for rough mapping, between a foot and a meter of precision, and I could connect it via Bluetooth to mapping software on my mobile.”
But this all changed when Schilling began an unmanned aerial system (UAS) program for the utility several years ago.
“I really needed survey-level precision for ground control points to geolocate the images from the UAS,” said Schilling.
He was aware of the high cost of centimeter-precision-capable surveying rovers and it was too big of an investment, considering that he only did UAS mapping a few times a month. As an existing Bad Elf customer on the company mailing list, Schilling learned about the new Flex rover, which offered multiple options, and he found one that seemed quite enticing for the needs of his utility.
Schilling purchased a Flex Standard bundle at a low base price, about $3,000, with the pay-as-you-go plan for high precision. In the standard configuration, the Flex is capable of autonomous positioning (1–5 m), and mapping grade (sub-meter precisions) via free satellite-based augmentation services (SBAS), such as WAAS. But when the user activates a pre-purchased “token,” the full centimeter-precision capability, using external corrections, is enabled.
“On the day of a UAS survey, we turn it on, activate a token from our account, and then we have 24 hours of high precision,” Schilling said. “It costs us $25 per day.”
For two to three UAS surveys a month, this works out to far less over many years than the cost of buying a typical surveying rover.
Correction Sources
For real-time kinematic (RTK) corrections, Schilling connects via NTRIP to the statewide cooperative real-time network (RTN); sometimes in a network RTK mode (such as VRS) or single-base RTK to a nearby reference station on the same network. The Flex accommodates NTRIP connections to RTN or IP-enabled reference stations, but Bad Elf has added even more flexibility for corrections.
In some scenarios there is no access to an RTN or no cell service (needed for NTRIP access). One option in these cases is to add a second Flex, set it up as an RTK base, and connect the base and rover via radios that Bad Elf offers.
Bad Elf has added other options for corrections: the Bad Elf RTK service taps into a nationwide real-time network operated by Point One Navigation. This is accessible via NTRIP in the same manner as regional, state or local RTN, and is offered for a monthly fee. In addition, for situations where there is no RTN or cell service, a global precise point positioning (PPP) service (Atlas) can be enabled on the Flex.
PPP differs from RTK/RTN in that it does not need the dense arrays of reference stations, or cell service to access. Instead, PPP derives very precise clock and orbit data from a global array of tracking stations and delivers this to the Flex via geostationary satellites. After a short convergence time, PPP from the Atlas service will yield 5 –10 cm precision over most of the globe.
The Full Boat
Full Configuration. Brian Cortese works for the City of Ellensburg, where he uses the FLEX Extreme Bundle for multiple field applications. (Image: Brian Cortese)
The City of Ellensburg, a college town and farming community in central Washington State, chose the Flex Extreme bundle for about $6,000 — the “full boat” configuration. The Extreme bundle enables all the add-on services all the time, eliminating the need for tokens. In their case, the frequency of use made the higher initial investment worthwhile.
“We have big plans for our rovers,” said Brian Cortese, Engineering Tech/Inspector for the City of Ellensburg Public Works & Utilities.
Ellensburg is a vibrant town that is attracting a lot of new development and it is being proactive in surveying and mapping assets as they are added or replaced.
“We’re recording manholes and valves, sewer systems, storm water systems, irrigation, hydrants — everything that gets built in the city gets as-built surveyed,” Cortese said. “Precise, real-time positioning, it’s been a benefit to us already. We can go out before they work on the subgrade for new developments and take measurements, and then when they finish the subgrade and pave it, we can go back and locate those exact positions.”
Ellensburg uses corrections from the statewide cooperative RTN. In fact, one of the RTN reference stations —also part of the NOAA National CORS Network — is right in the center of town atop the science building of Central Washington University. While the city does a wide variety of surveying and mapping, with the Flex and RTN corrections surveyors get the same centimeter-precision for everything they measure in the field.
“We’ve done design projects with it,” Cortese said. “For instance, we recently took measurements in an area of downtown for a proposal by recording positions and elevations to develop a new park and entertainment area for the community. We are also marking Americans with Disabilities Act (ADA) ramps to meet federal specs out in the field — it’s been really handy for so many things.”
Survey-Grade Rover
To serve the full range of precision needs, the Flex had to be designed as a survey-grade rover. It has a full-constellation GNSS and RTK engine: GPS, GLONASS, Galileo, BeiDou, and support for other regional constellations. With more satellites in view, it can perform in sky-view-challenged locations, such as around buildings and under tree canopy.
“Ellensburg is on the Tree City, USA list; our streets are very well lined with a variety of trees, which is also where a lot of our utilities are and development is going on,” Cortese said. “We have been able to get good precisions in and around those trees. Actually, someone on our staff is taking an inventory of the trees with the Flex and loading the data directly into ArcGIS.”
Even in the more rural areas of Grant County that enjoy a lot of open sky, Schilling said, some areas planned for mapping are along upper tributaries and in the hills with a lot of tree coverage. He said the Flex has performed well in those areas.
Choices
The Flex offers these options and combinations:
Flex Extreme. Full survey-grade rover that can use a variety of correction types.
Base-Rover RTK. Two Flex Extreme units connected via radio.
External RTN/RTK corrections via NTRIP.
Bad Elf RTK Service. Single-tap access to a nationwide RTK corrections service.
PPP service. Atlas PPP corrections via L-band geostationary satellites.
Flex Standard. Pay-as-you-go high-precision-enabled service using tokens.
Static Logging. Observation file logging for post-processing (supported by Flex Extreme).
Compatibility with multiple field-mapping software applications.
While many modern GNSS rover systems support one or more options similar to those listed above, Bad Elf’s Flex supports all of them, making it capable of a wide variety of applications.
Point One’s FusionEngine software, which is rated for automotive safety integrity level (ASIL), is now compatible with STMicroelectronics’ Teseo ASIL Precise Positioning GNSS chipset (TeseoAPP). This assures functional safety as ASIL-B, a requirement for Level 3+ advanced driver assistance systems (ADAS).
FusionEngine can be integrated into several different host processors that are used for enabling high level ADAS and autonomous driving systems. The combination of TeseoAPP’s receiver and the STA5365S external RF front-end provides dual-band measurement data for all visible GNSS satellites to the main host processor into which FusionEngine is integrated.
FusionEngine software is a precise location solution for automotive applications. For accuracy and to ensure the safety and integrity required for high level autonomous vehicles it combines data from multiple sensors, including the TeseoAPP multi-band GNSS receiver. It also enables developers to complete the functional safety concept phase for host system software integration.
Quectel Wireless Solutions, a supplier of IoT modules and antennas, and Point One Navigation, a provider in precision location technology, have announced the LG69T-AM, the latest addition to the LG69T GNSS Module Series. Point One’s positioning engine powers the LG69T-AM and enables centimeter-level global accuracy by integrating augmented GNSS in a module with open-source API.
The LG69T-AM GNSS module features STMicroelectronics’ Teseo V dual-band L1/L5 positioning receiver platform with 80 tracking and four fast acquisition channels compatible with GPS, GLONASS, Galileo, BeiDou, QZSS and NAVIC.
The LG69T-AM leverages Point One’s RTK and SSR technology for centimeter-level accuracy and ultra-fast convergence time. It is designed for easy integration with minimal e-BOM modification and is well-suited for mass market adoption without the need for an expensive external co-processor. Due to its small package size, light weight, and excellent power consumption, it is ideal for applications such as robotics and precision agriculture.
Embedded in the LG69T-AM is Point One’s FusionEngine and its Polaris correction service client. FusionEngine is compatible with standards-based corrections services including those based on RTCM.
Polaris is Point One’s own GNSS correction service that unlocks better than 10cm absolute accuracy with a coast-to-coast footprint in the United States and coverage across Europe. It offers a variety of connectivity options including delivery over cellular and L-band. The network is purpose-built for precision agriculture customers and includes advanced anti-jam, interference mitigation, end to end security and automatic integrity monitoring unmatched by any other provider.
Aceinna, a developer of inertial-based guidance and navigation systems for autonomous vehicles and devices, has partnered with Point One Navigation, which delivers precise positioning for the next generation of transportation.
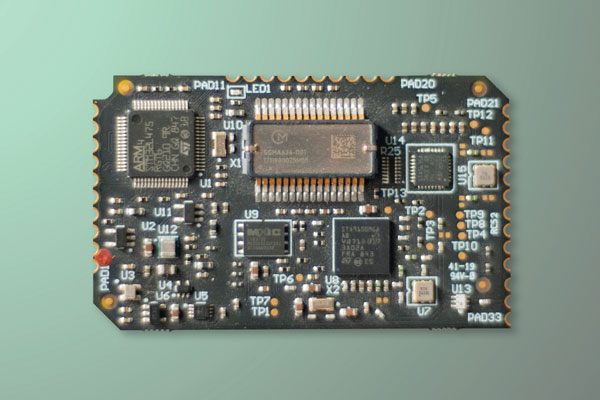
According to the companies, the partnership enables a streamlined positioning platform that combines Point One’s Polaris GNSS cloud correction service with Aceinna’s OpenRTK330 hardware and software solution for developers in agriculture, construction, mapping, surveying, robotics and trucking.
OpenRTK330, designed for use in Level 3 ADAS and other high-volume applications requiring precise position information, is a GNSS receiver with a built-in RTK engine and triple redundant inertial sensors. According to Aceinna, it includes a multi-band RTK/GNSS receiver coupled with redundant inertial sensor arrays to provide centimeter-level accuracy, enhanced reliability and superior performance during GNSS outages. OpenRTK300 is supported by Aceinna’s open-source tool chain.
Through backend server synchronization between the companies, activation and authentication will be streamlined. In addition, true centimeter-level accuracy will be attainable and powered by the integration of Point One’s coast-to-coast Polaris network and Aceinna’s OpenRTK platform, the companies said.
“This partnership between Aceinna and Point One harnesses and combines each of our distinct strengths, to offer a solution platform that makes high performance positioning accessible to a variety of industries and applications,” said Yang Zhao, chairman and CEO of Aceinna. “We are thrilled to work with Point One’s technical expertise and execution to advance this technology to the next level of precision.”
The combined offering will be available for purchase beginning December 2020.
Aceinna is headquartered in Andover, Massachusetts, and Point One Navigation is headquartered in San Francisco.
Septentrio has teamed up with Point One Navigation, a provider of precise location as a service, for autonomous vehicle demonstrations during the 2019 International Consumer Electronics Show, which will take place Jan. 8-11 in Las Vegas. During the conference, invitees will be able to ride in a fully autonomous demonstration vehicle that incorporates technology from both companies, as well as meet directly with technical experts, reports GIM International.
During the demonstration, Point One Navigation will showcase its proof-of-concept autonomous vehicle equipped with the the FusionEngine vehicle localization software. According to the company, demonstrations will utilize corrections from Point One’s Polaris Cloud, a new correction network that enables high-precision GPS and computer vision-based localization, while allowing the customer to choose the performance and price point that best fits their application.
According to GIM International, Point One’s solution is powered by Septentrio’s GNSS receivers. For accurate positioning of autonomous vehicles, Septentrio utilizes at least two frequencies broadcast by each GNSS constellation (BeiDou, Galileo, GLONASS, GPS, QZSS), the companies said.
For users operating in open sky scenarios, a Septentrio RTK receiver can be used directly with Polaris Cloud to provide centimeter-level accuracy.
Point One Navigation has chosen to work with Septentrio to power its solutions for both the correction network and our FusionEngine reference design because of the excellent quality, robustness and jamming resistance of their GNSS receiver technology, said Aaron Nathan, CEO and co-founder of Point One Navigation.