A team of researchers has developed a low-cost sensor that can detect the changes in river height to provide wide-area flood warnings.
The Raspberry Pi Reflector (RPR) was designed by a team of scientists from the University of Bonn, the Federal University of Rio Grande do Sul, and the University of Colorado.
The solar-powered RPR is much less expensive (about US$150) than scientific-grade or geodetic GNSS instruments — the cost of which is “a limiting factor for their prompt and more widespread deployment as a dedicated environmental sensor,” the team writes in their paper.
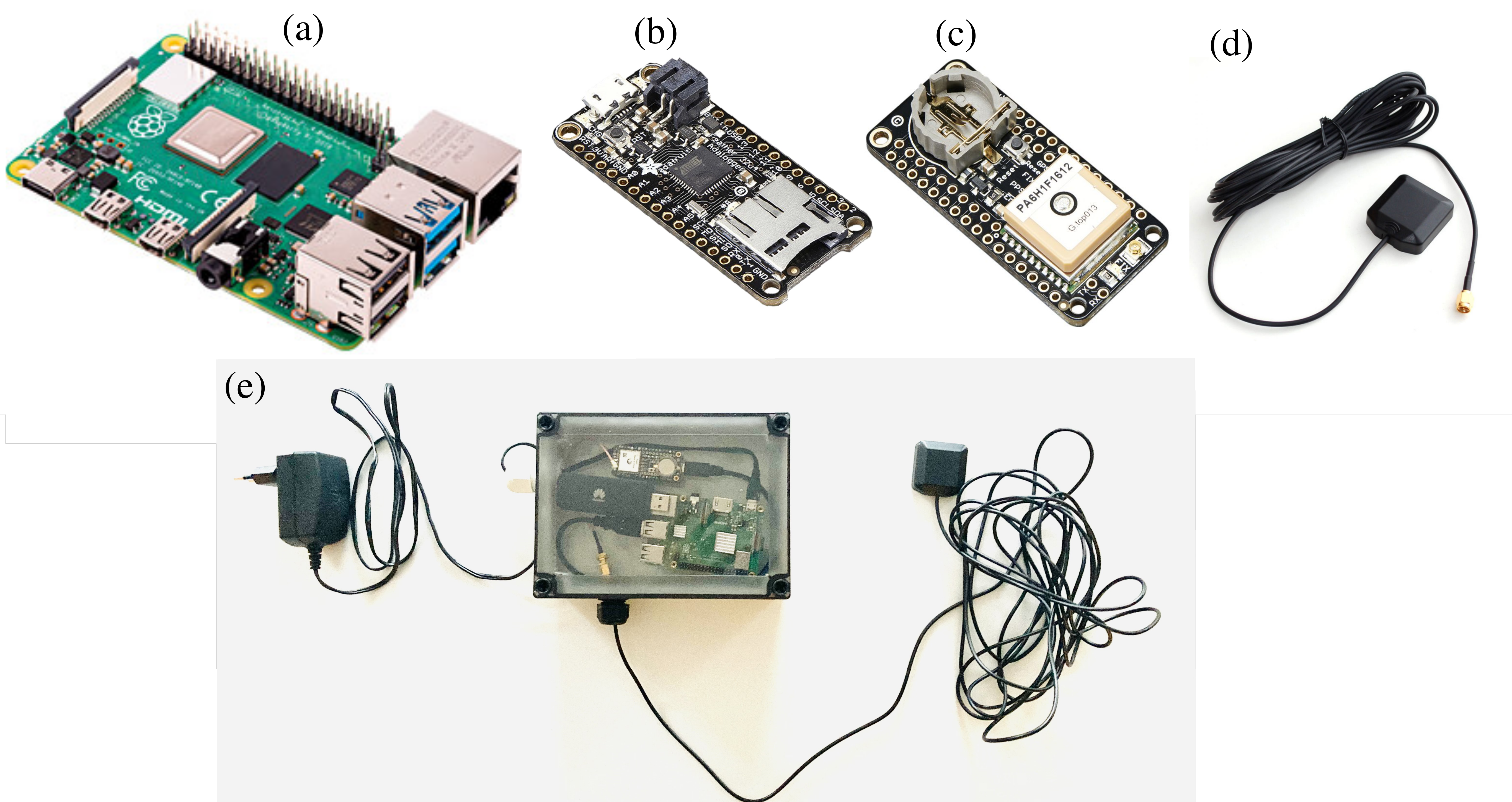
The Raspberry Pi Reflector (RPR) prototype includes a low-cost and low-maintenance single-frequency GPS module (an Adafruit GPS FeatherWing receiver) and an unspecified GPS antenna connected to an inexpensive Raspberry Pi microcomputer. One such unit has been successfully operating since March 2020 in Wesel, Germany, next to the Rhine river.
The unit on the Rhine provides sub-daily and daily water levels retrieved using spectral analysis of reflection data, or GNSS-reflectometry. The river level measurements from the RPR are compared with a co-located river gauge.
By changing the orientation of the antenna from upright to sideways facing the river, which was done in August 2021, the root-mean-square error (RMSE) was lowered to from 7.6 cm to 3 cm (sub-daily) and 6 cm to 1.5 cm (daily), the team said.
“While satellite radar altimetry techniques have been utilized to monitor water levels with global coverage, their measurements are associated with moderate uncertainties and temporal resolution,” the team states. “Therefore, such low-cost and high-precision instruments can be paired with satellite data for calibrating, validating and modeling purposes.”
Information about the RPR is available on GitHub.
