SLAM-based mobile mapping with integrated 360° color is a rugged, geo-enabled, high-density and versatile workhorse
Kaarta, an innovator of real-time mobile 3D reality capture, has announced beta testing on Stencil Pro, a versatile professional-grade mobile mapping platform with dimensional and visual fidelity.
According to a Kaarta press release, “Whether on the road or on a job site, in a warehouse or an office, an underground mine or in the woods, along a utility corridor or a railway, the multipurpose Stencil Pro mobile mapping system is ready to take on the most challenging environments with impressive speed, providing accurate and visually stunning results.”
An all-in-one system to scan, process and view captured data in real time, Stencil Pro offers panoramic high-definition 4K imagery and colorized point clouds. With robust surround-view perception in a wide range of light conditions, Stencil Pro is optimized for both indoor and outdoor performance.
Featuring a 32-line high-density, low-noise lidar with a range of 120 meters (nearly 400 feet) and a data rate of 600,000 points per second, Stencil Pro produces a highly accurate 3D model in minutes.
With an IP65 rating, Stencil Pro is safeguarded against adverse elements such as dirt, dust, fog and rain, making it the ideal tool for infrastructure mapping, mining, forestry, earthworks, construction and other harsh environments. Stencil Pro’s rugged and versatile design is adaptable to many environments, capturing data amidst poor weather, dusty work environments, and below-ground cavities or when mounted on vehicles, locomotives, ATVs and other platforms.
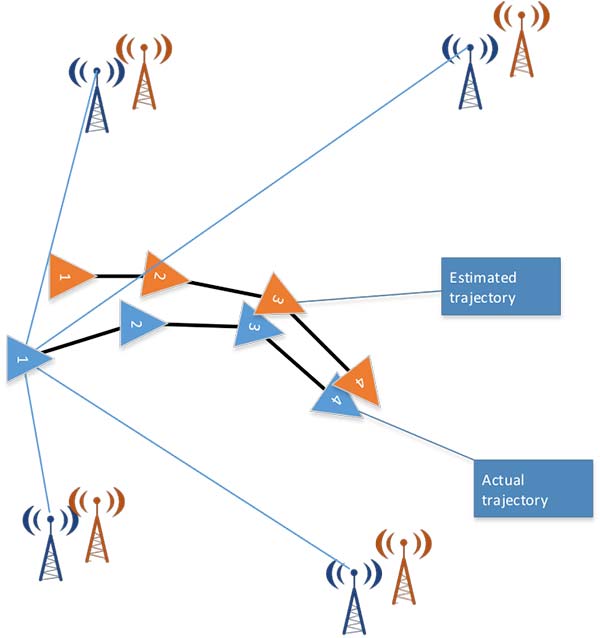
Like all Kaarta systems, Stencil Pro’s simultaneous localization and mapping (SLAM) capabilities means it operates in GNSS-denied areas such as indoor, underground, under canopy, or in urban canyons. However, it is also fully geo-enabled for the many applications such as street, corridor and rail mapping where the addition of a GNSS signal is highly beneficial.
Stencil Pro integrates the Trimble BD-990 receiver, AV-28 antenna and a range of other third-party GNSS antennas. It supports positioning accuracy enhancements through live RTK/NTRIP processing as well as PPK corrections based on data provided by the NOAA CORS network or a user-supplied base station.
GNSS positioning data is used to align and geo-register data, providing global accuracy and further enhancing the fidelity of large area scans and long, linear scan paths. With the ruggedized design, enhanced power capabilities, as well as the option of incorporating the industry-leading SLAM accuracy in addition to – or independent of – geopositioning, Stencil Pro has the scale of traditional mobile mappers for a fraction of the investment.
The onboard GNSS and color cameras are fully integrated into real-time capture, allowing for optimization of collected data as well as flexibility in output. The advantage of absolute positioning and accuracy coupled with 360 degree imaging technologies produces a true color, rich and robust point cloud when needed. If a colorized point cloud is not required, or GNSS is not available, reliance on other sensors is seamless.
“Billions of dollars of commercial real estate transactions, construction projects, infrastructure maintenance and natural resource management decisions rely on understanding existing conditions data,” said Kevin Dowling, Kaarta CEO. “Obtaining up-to-date data for these environments is laborious, time consuming and expensive with current methods. Even in the most challenging scenarios, Stencil Pro rapidly provides the answers needed for managers to make informed decisions.”
Stencil Pro is powered by either 100-240 VAC input (or 12V with an inverter) or using its two hot-swappable batteries which last for up to 3 hours of scanning. Stencil Pro’s intuitive user interface makes data capture and processing simple. The user experience includes one-button scanning, real-time scan monitoring and streamlined post-processing options for maximizing data clarity and usability. Remote operation with a touchscreen monitor allows for mounting Stencil Pro on a multitude of transports. When hand-carried, scan status can be started and stopped with the press of a button.
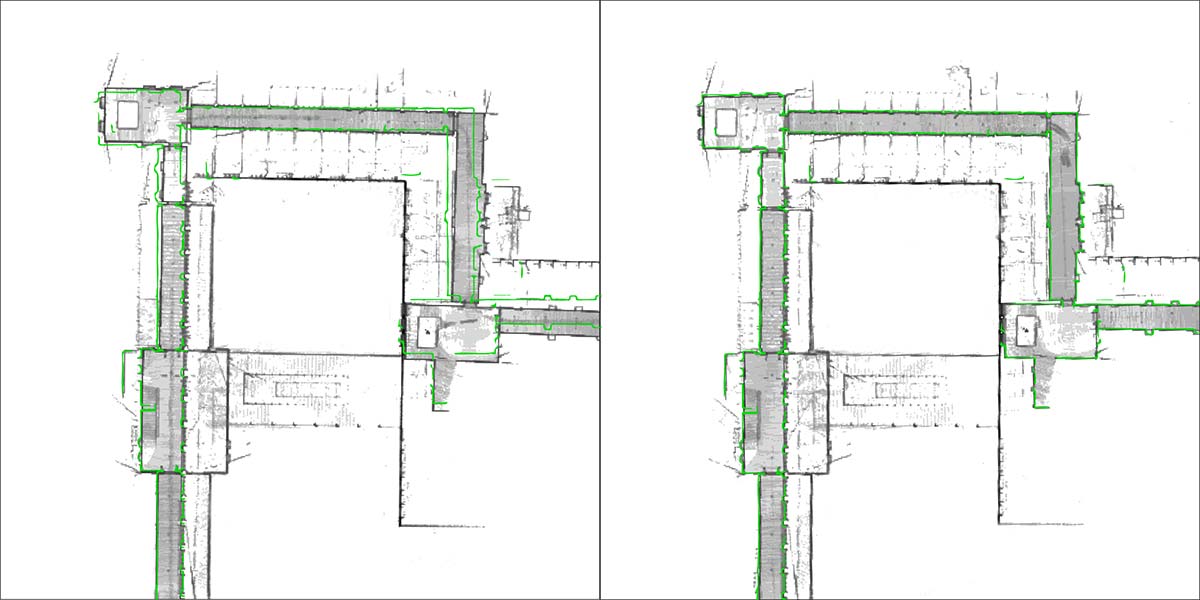
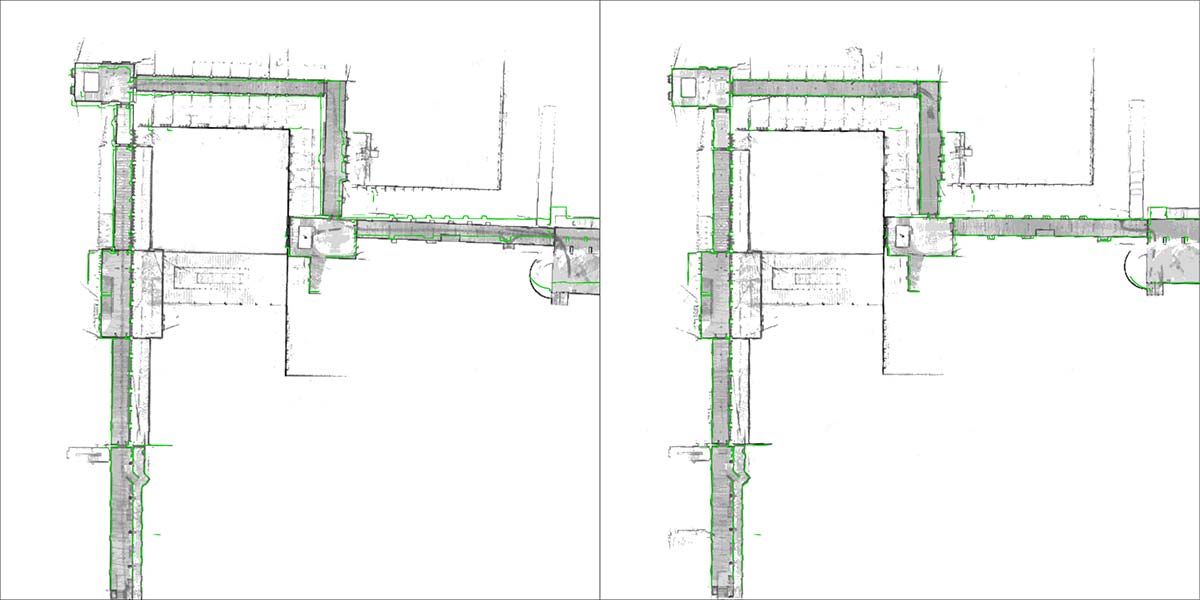
Stencil Pro is built on Kaarta Engine, Kaarta’s patent-pending approach to solving the SLAM problem. Kaarta’s unparalleled expertise in localization – a result of its deep robotics roots – delivers definitively lower drift error than alternative SLAM systems by an order of magnitude. Kaarta’s proven technology, quality, and accuracy is trusted by AEC, geospatial, natural resource management and autonomous mobile robot professionals worldwide.
Limited quantities of Stencil Pro will be available to ship in June. Those interested in being considered for early access to discuss a specific application, schedule a demonstration or review sample data sets can apply for the Stencil Pro Early Access Program.