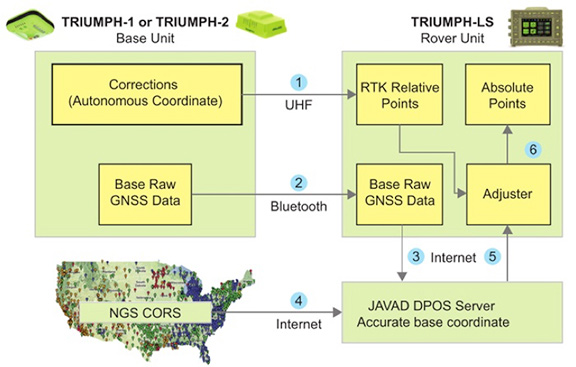
Javad GNSS, makers of the Triumph-LS Rover receiver and the Triumph-1 and -2 base units, is offering a software procedure called Cluster Averaging, which takes advantage of its six different RTK engines and the J-Field receiver firmware.
While a typical survey point collected by RTK methods requires multiple occupations to verify the integrity of the location and elevation, Javad GNSS’ J-Field program significantly reduces survey by collecting multiple sets of survey data through each RTK engine, the company said. During the data acquisition process, the receiver automatically forces a loss of satellite lock and restart to ensure multiple sets of independent data are collected for redundancy and quality assurance.
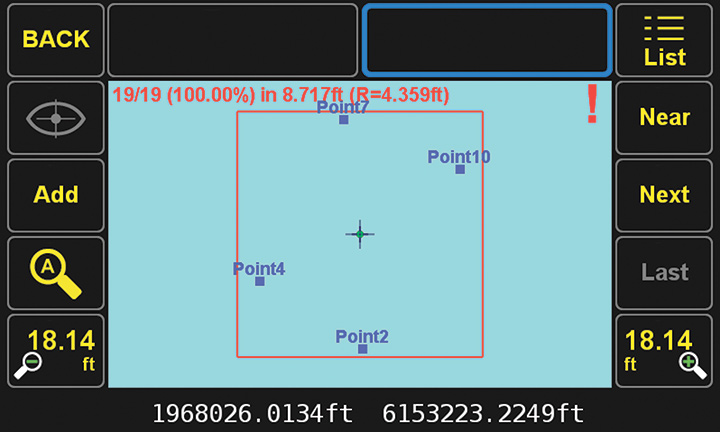
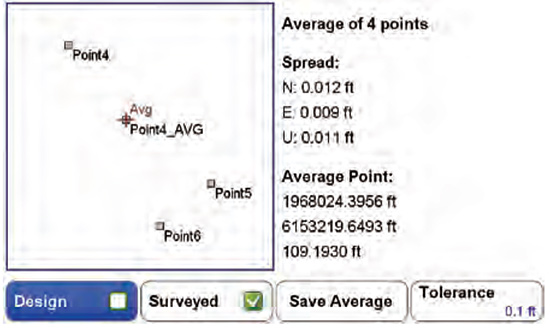
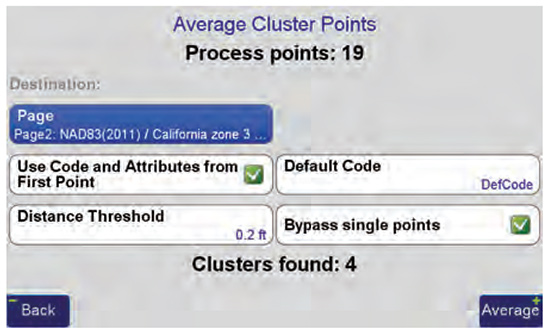
As the surveyor returns for another set of redundant data, Cluster Averaging will recognize the previous surveyed points to provide error analysis using their chosen parameters for quality assurance. The surveyor may allow the J-Field software to average all of the data points or pick and choose those needing specific verifications. Also, the surveyor can specific different precisions for varying types of data collection (for example, control points vs. topographic data).
Point numbering and data attributes are also automated during the cluster averaging processes. Once the operator has designated both number and field code, this information is reused each time to eliminate potential conflicts.
Reports from the J-Field program documenting the locations with multiple occupations are easy to generate and informative, Javad GNSS said. By reviewing the results of the clusters, data integrity can be decided at the time of the survey and save time by later office verification. The surveyor can confidently complete the survey task knowing proof of accurate data for the project is at his/her fingertips.
Cluster averaging within the J-Field program simplifies the redundant task of point verification, with a user-friendly interface and report, the company added.