UAV Navigation has developed a flight-control solution specifically for vertical-take-off-and-landing (VTOL) fixed-wing drones.
Interest in using VTOL platforms has grown in the past few years, according to the company. A hybrid between fixed-wing and rotary-wing platforms, VTOLs provide operators with versatility.
The company’s fixed- and rotary-wing development teams worked together on the flight-control solution. Technological capabilities from other solutions — referenced navigation or the development of missions in environments without GNSS signals and under threat of jamming attack — have been incorporated in an organic way to facilitate a complete and reliable system.
The hardware developed by UAV Navigation has the MIL-STD-810F and MIL-STD 461F certification, proving the system has been tested by an independent body that certifies its extraordinary behavior in adverse conditions.
“Our extensive experience with fixed-wing and rotary-wing platforms allows us to know the strengths and challenges that these platforms face as a mission is performed,” said Miguel Ángel de Frutos, CTO of UAV Navigation. “Taking this as a starting point, we have managed to develop a specific solution for VTOL platforms that not only has the same technological capabilities as our existing solutions, but also enables missions to be carried out with the highest possible security.”
One of the main challenges with VTOL platforms is the transition from vertical to horizontal flight and vice versa. UAV Navigation’s solution facilitates and automates this critical moment as much as possible, while optimizing battery use. A series of safety and emergency procedures allow the aircraft to always reach a safe landing zone and overcome possible errors in the engine.
An adaptable VTOL software architecture allows users to customize and configure the solution through the ground control station.
Partnership with AnsuR Technologies
UAV Navigation is partnering with AnsuR Technologies to enable streaming high-definition (HD) video from small UAVs carrying a 200-kbps satcom terminal.
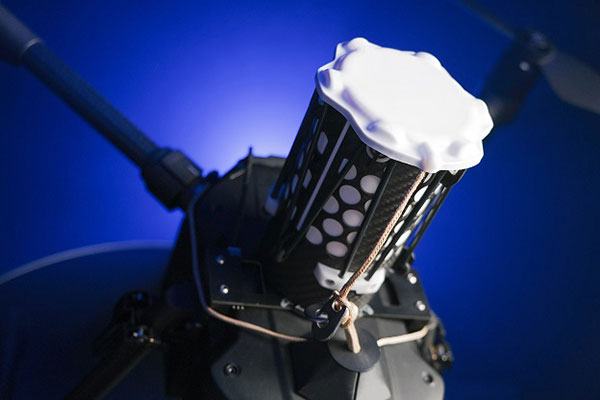
With the partnership, the Asmira software solution fro AnsuR provides the ability to optimize sending video and images for satellite communications. Asmira, together with the Cobham Aviator UAV 200 and the antenna pointing solution Polar-300, provided by UAV Navigation, can deliver cost-effective high quality video transmission for small satellite platforms.
Integrated into the platform’s onboard network, UAV Navigation’s Polar AHRS delivers the attitude and steering information of the platform so the Cobham device can establish contact with the satellite.
The Polar AHRS, a device designed to meet the demanding needs of the aeronautical sector, includes all the necessary sensors in a compact device to provide precise information to the servos in a gimbal or an antenna, enabling its control. Once a stable satellite link is established, the Asmira software delivers HD-quality video at rates down to 100 kbps and can support SD quality below 50kbps.
The partnership enables good-quality streaming for long-range surveillance, infrastructure monitoring and search-and-rescue missions where videos are critical.
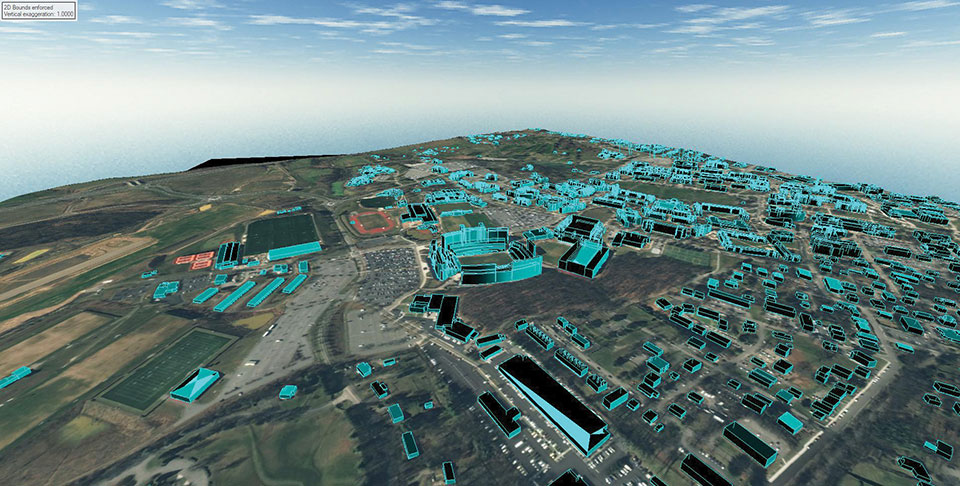
L3Harris provided a detailed digital map of Blacksburg, Virginia, to aid in the development of a Navigation Performance Forecast for UAVs, specifically for beyond-visual-line-of-sight flights.
L3Harris used a novel method of 3D map generation using a deep stack of high-resolution satellite imagery and artificial-intelligence technology without the time or expense of a site visit. This detailed mapping technology, known as multi-view photogrammetry, was used in a pilot study to determine the viability of using modern, automated, mapping technologies to build a scalable methodology that can be applied to very large-size mapping programs, potentially covering the urban areas of North America and Western Europe.
The company is using these 3D maps with its GNSS forecast technology to accurately predict GPS performance for UAS flight planning and operation. This prediction helps the unmanned aircraft service supplier and UAS operator ensure safe operations.
The L3Harris Geospatial Data Products team provided 2D and 3D products, including the vector map shown above.
With a very good PNT device already installed for flying the aircraft, why not just tap into that one for the payload, right? This might not be a good idea, for several reasons.
By John Fischer Vice president, Advanced R&D, Orolia
John Fischer. (Photo: Orolia)
The navigation device in a UAV is very important, precisely because there is no pilot. It must navigate autonomously. It must also be optimally suited for the airframe, either fixed or rotary wing, providing the accuracy and reliability for all modes of flight, from takeoff to landing. A lot of engineering goes into the design and certification of each UAV’s navigation system to qualify it for flight.
UAVs can have multiple missions with interchangeable payloads: cameras for observation and inspection; communication equipment for relaying links or supplying emergency cellular base stations; or sensing equipment such as radar, lidar, spectrometers, etc. These payloads also need positioning, navigation and timing (PNT) sources for their missions, for example, to accurately geo-timestamp the collected data.
With a very good PNT device already installed for flying the aircraft, why not just tap into that one for the payload, right? Actually, this might not be a good idea, for several reasons.
Recertification. Modifying the navigation device, which is part of the flight control system, risks having to re-certify the aircraft for flight safety. Though a UAV has less severe restrictions on safety than a manned aircraft, it can still cause property damage or even injury and loss of life if it crashes in a populated area. The Federal Aviation Administration has numerous standards — DO-178 for software, DO-254 for hardware, DO-160 for testing — to ensure avionics are designed and tested for safe operation. Every modification, regardless of how small, must follow these standards and may require expensive re-certification of the aircraft’s airworthiness.
Performance Requirements. These vary with each mission. The flight control system includes a navigation device that was selected based on the aircraft’s special requirements. These will not necessarily match the needs of the payload. For example, consider pitch, roll, and yaw sensing accuracy. The accuracy required to determine the pointing angle of a camera might not be the same as what is needed for level flight.
Interchangeability. A particular UAV can have multiple payloads for different missions. Conversely, a particular mission payload can be adapted and installed on several different UAVs. Having a second PNT device matched to the payload allows it to stay with the payload as it is moved to different UAVs. This can lower the total cost of ownership and operation, since the extra cost of a second device is small compared to the adaption work and design changes necessary to make a single PNT device be suitable for all situations.
Missing the T in PNT. Typically, the navigation device for flying the aircraft doesn’t have a precise internal oscillator for supplying time and/or frequency — it doesn’t need it. However, most payloads can benefit from the time/frequency component to enhance mission performance. A low phase noise oscillator with low g-sensitivity that is disciplined by the precise time supplied by a GNSS receiver can substantially improve the performance of any payload radar or communication system.
A second device does not impact SWAP or cost significantly — GNSS receivers and inertial navigation systems are no longer large, expensive items. A second PNT device is typically small, weighing less than a kilogram and consuming only a few watts of power. There are also fewer connectors and cable harnesses when a removable payload is not sharing the aircraft’s PNT data, so the weight differential might be zero. PNT devices can share antennas on the aircraft via splitters, so there is no need to place additional antennas.
Technology upgrades. Micro-electromechanical systems (MEMS), inertial sensors, cameras, lidars, radars and other sensors are all evolving at a rapid pace with better technology available with each passing year. Flight control systems evolve at a different pace — mostly because of the flight certification process, but also for lack of a driving need. UAVs navigate just fine with the equipment they have today. A separate payload PNT device allows the system designer to keep pace with evolving technology, choosing the latest and best for the mission without disrupting the navigation system.
Just as “two heads are better than one” for problem solving, having two PNT devices in a UAV is often the better solution.
John Fischer is vice president, Advanced R&D, Orolia, and a member of GPS World’s Editorial Advisory Board.
A roundup of recent products in the GNSS and inertial positioning industry from the October 2020 issue of GPS World magazine.
OEM
GNSS antennas
Active and passive
Photo: 2J Antennas
A new range of high-precision GNSS antennas is designed for superior accuracy and reliability, with both active external antennas and passive internal ceramic antennas. The antennas provide precision, high bandwidth, and an advanced signal design for GPS, GLONASS, BeiDou, Galileo, IRNSS and SBAS navigation. They are designed for demanding GPS applications that require centimeter-level accuracy by combining precise point positioning (PPP) of L1 and L2 or by combining L1 and L5 bands with real-time kinematic (RTK) satellite navigation. Applications include aviation safety, UAVs, transportation, autonomous vehicles, agriculture and land and hydrographic surveys.
The HC976 housed and HC976E embedded helical antennas are light and compact, suitable for applications ranging from autonomous navigation to GNSS timing. Both models support GPS/QZSS-L1/L2/L6, GLONASS-G1/G2, Galileo-E1/E6, and BeiDou-B1/B3 frequency bands as well as regional augmentation systems and high-precision L-band correction services. The HC976 and HC976E support QZSS-L6, Galileo-E6 and BeiDou-B3. The HC976 is 44 x 62 millimeters and weighs 42 grams. It features a precision-tuned helical element that provides an excellent axial ratio and operates without the requirement of a ground plane, making it suitable for a wide variety of high-precision applications.
The mosaic-T GPS/GNSS receiver module is built for resilient and precise time and frequency synchronization under challenging conditions. Its multi-frequency, multi-constellation GNSS technology with AIM+ Advanced Interference Mitigation algorithms allows mosaic-T to achieve maximal availability even in the presence of GNSS jamming or spoofing. The compact surface-mount module is designed for automated assembly and high-volume production. Mosaic-T delivers timing and has additional inputs for an external high-accuracy clock.
The HGuide n380 inertial navigation system (INS) communicates an object’s position, orientation and velocity when GNSS signals are unavailable. It is built to withstand harsh environments in the air, on land or at sea. It is designed to meet the need for a small, high-performance INS for 3D mapping, surveying and other applications where space is at a premium. It is composed of Honeywell’s HGuide i300 inertial measurement unit (IMU), a GNSS receiver and Honeywell’s proprietary sensor-fusion software, which is based on the algorithms used for navigation on millions of aircraft every day.
The LC29D eMobility module is a sub-meter-level GNSS module that integrates dead-reckoning and multi-band (L1/L5) real-time kinematic (RTK) algorithm technologies with fast convergence times and reliable performance. The module supports dual-band GNSS raw data output and integrates a 6-axis IMU sensor to deliver high-accuracy positioning performance in seconds. Based on the Broadcom BCM47758 GNSS chip, the LC29D can concurrently receive signals from up to six constellations (GPS, GLONASS, Galileo, IRNSS, BeiDou and QZSS), which maximizes the availability of sub-meter level accuracy. It offers a position update rate of up to 30 Hz (fusion output), enabling dynamic applications like shared emobility, delivery robots and precision agriculture to receive position information with lower latency.
The AlphaUni 300/900/1300 lidar series provides light, versatile long-range laser scanner systems for the high-end market. The series provides optimized data sets powered by advanced GNSS/inertial navigation system (INS) sensors and long-range Riegl scanners. AlphaUni’s design adapts to a variety of applications and can be installed on a variety of platforms, including multi-rotor UAV, fixed-wing vertical-takeoff-and-landing (VTOL) UAV, vehicles, rail trolleys, backpacks, boats and more.
The F100 GNSS receiver, an upgrade to the F90, is designed to meet surveyors’ demands for high field performance, flexibility and cost-effectiveness. It tracks multiple constellations (GPS, GLONASS, Galileo, BeiDou) and can maximize the acquisition and tracking process with all-in-view GNSS frequencies. The 1.45-inch color LCD display is a multi-touch capacitive screen. The F100 has 32GB of internal memory. Its integrated second-generation web user interface control is compatible with all devices and browsers.
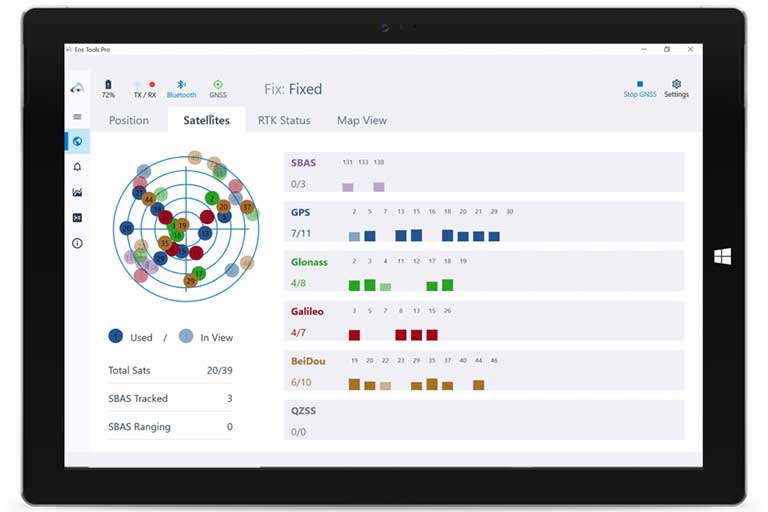
Eos Tools Pro for Windows 10 implements powerful new features that enable users to exploit all four global GNSS constellations and a state-of-the-art NTRIP client to access real-time kinematic (RTK) bases and RTK networks all over the world via NTRIP, Direct IP and wireless radios. It provides the latest support for Windows Geolocation and other features by Microsoft to allow customers to use high-accuracy locations directly in their apps, such as RTK network/RTK base connectivity, support for all new Beidou and Galileo satellites, and SafeRTK functionality for areas with marginal cellular coverage. Features for app developers are also available.
The BB4 UAV high-end multi-rotor drone is optimized for the AlphaUni 300/900/1300 lidar series. Its modular design simplifies deployment in just a few minutes. Its 7-kg payload breaks the capacity barrier, and its more than 45 minutes of flight time increases the airborne lidar survey ability. The redundant CHCNAV and DJI inertial measurement unit (IMU) and GNSS unit provide reliable centimeter real-time kinematic (RTK) positioning, meeting the demand for high accuracy in the geospatial and mapping industries.
The ADNET autonomous delivery network is a technical solution to transport medical samples and quarantine materials in cities. It uses an RA3 drone, unmanned vehicle RG1 and RH1 hub station to deliver medical supplies without relying on manpower, alleviating time spent in traffic and the cost of traditional delivery. Supplies retrieved by the RG1 vehicle are delivered to the RH1 hub for sorting and redirecting, while the drone transfers the supplies between hubs. The RG1 then delivers goods on the receiving end. The system was demonstrated during China’s COVID-19 epidemic prevention and control period, reducing contact between samples and personnel.
The VECTOR-400 is a compact autopilot designed specifically for unmanned aerial vehicles. It features a robust enclosure and a military-grade connector for harsh environments (MIL-STD 810 and MIL-STD 461). Features enable sea-skimming (extremely low-level flight) and the capability to navigate without GNSS. The VECTOR-400 is able to continue a mission in case of individual sensor failure and when subject to jamming, maintaining accurate estimations of attitude and position. Advanced algorithms provide stall prevention and the ability to carry out an efficient gliding maneuver in case of engine failure. Its air data attitude and heading reference system and inertial navigation system provide high-precision attitude information and reliable navigation under demanding circumstances.
The F700 DroneHunter UAS is a radar-based autonomous interceptor drone for tracking and stopping dangerous drones. Its flexible undercarriage offers interchangeable counter measures for single, multiple or swarm-based threats, while its lightweight carbon-fiber frame enables quick speed and response. The F700 can carry multiple types of anti-drone countermeasures and deploy them in real time, based on which dynamic threat is detected miles beyond the protected area. The pogo pins and payload snaps of the undercarriage are integrated with artificial intelligence for firing and flight software.
Drones equipped with cost-intensive cameras and sensors need protection in the event of a flight-system failure. A parachute system for the DJI M210 drone is now available. Both commercial and emergency response operations are using the M210; its design and flexibility allow for a variety of industry-specific applications. The DRS-M210 parachute system is designed to ensure high pendulum and wind stability, allowing a damaged drone to land safely with minimal impact.
Altitude indicator (AI) or directional gyro (DG) replacement
Photo: uAvionix
The AV-30-C aircraft panel display adds a suite of in-flight information for pilots, including GPS navigational data, a probeless angle of attack indicator, baro-corrected altitude, indicated/vertical/true airspeed, non-slaved heading, bus voltage and G load. It is designed to fit into any aircraft with a 3 1/8-inch round instrument slot without cutting or modifying the panel. It is authorized for FAR Part 23 Class 1 and Class 2 aircraft listed on the AV-30-C Approved Model List (AML), containing 635 aircraft models including Cessna, Piper, Beechcraft, American Champion, Maule, Boeing, Swift, Mooney, Aviat and others.
The R3S series of rugged, EN-50155-certified fanless vehicle/rail computers is equipped with a u-blox NEO-M8N module, which receives GPS, Galileo, GLONASS and BeiDou with the default set for GPS + GLONASS dual band. The series offers power-efficient performance for consolidating in-vehicle workloads such as video surveillance, control/monitoring, passenger information and Wi-Fi hotspot sharing. For edge-to-cloud connectivity, R3S uses its internal GPS/GLONASS chipsets for GPS tracking and has two M.2 slots with up to 4x SIM card readers for failover LTE connection. To ensure proper operations in moving vehicles, the series is certified with EN50155, EN50121-3-2, EN50121-4, EN50125-3, EN45545 and E13 standards and has passed MIL-STD-810G shock and vibration resistance certifications. The series can operate under a wide temperature range and offers excellent reliability in harsh railway settings. It has one external removable 2.5-inch HDD/SSD drive bay for recorded footage storage. For consolidating in-vehicle workloads such as in-vehicle control/monitoring and passenger information, the R3S features a variety of I/O support, including 2x HDMI, DI/DO, 3x COM/CAN BUS and 4xUSB ports.
Tactical Embedded series of GNSS/IMUs. (Photo: VectorNav)
Embedded navigation company VectorNav Technologies has introduced a new line of inertial products: the VectorNav Tactical Embedded series of GNSS/IMUs.
Featuring a tactical-grade inertial measurement unit (IMU) and a multi-band GNSS receivers, the Tactical Embedded delivers milliradian attitude accuracy and centimeter-level positioning capability in a miniature 15-gram package.
VectorNav’s Tactical Embedded line is in a new smaller size, and enables cost reductions for a wide range of autonomous pointing and geo-referencing applications. These include gimballed intelligence, surveillance and reconnaissance (ISR), SATCOM systems, lidar mapping and photogrammetry, among many others.
The Tactical Embedded line supports external SAASM GPS for defense applications in ISR, electronic warfare, munitions and UAV navigation.
“The Tactical Embedded is the culmination of years of development to bring milliradian-level attitude performance and robust positioning into a form factor that represents a disruptive step in inertial navigation capability,” said VectorNav President John Brashear. “Systems integrators worldwide can now embed tactical-grade inertial navigation capabilities into their electronics, unlocking a range of new applications and possibilities.”
Designed and engineered at VectorNav’s AS9100-certified facility in Dallas, Texas, the Tactical Embedded line includes the VN-110E IMU/AHRS, the VN-210E GNSS-aided inertial navigation system (INS), and the VN-310E Dual Antenna GNSS/INS.
Highlights include:
0.05-0.1° heading; 0.015° pitch and roll
1 m horizontal and 1.5 m vertical position accuracy
UAV Navigation has launched the VECTOR-400, a compact autopilot designed specifically for unmanned aerial targets (UAT). It features a robust enclosure and a military-grade connector designed to withstand the harshest environments, in accordance with MIL-STD 810 and MIL-STD 461.
“We wanted to develop a solution specifically for manufacturers of aerial targets,” said Tobias Webster, managing director of UAV Navigation. “That is why it was important for the autopilot to have the features required by this kind of UAV, such as sea-skimming (extremely low-level flight) or the capability to navigate without a GNSS signal.”
Thanks to its physical and logical redundancy, the VECTOR-400 is able to continue a mission in case of individual sensor failure and even when subject to jamming, maintaining accurate estimations of attitude and position. It features advanced algorithms for stall prevention and the ability to carry out an efficient gliding maneuver in case of engine failure.
The VECTOR-400 uses an air data attitude and heading reference system (ADAHRS) and inertial navigation system (INS) developed by UAV Navigation, which provides high precision attitude information and which allows reliable navigation even under the most demanding circumstances.
The ADAHRS gives the VECTOR-400 the capability to operate in GNSS-denied environments (less than 30 m/min drift) and also to execute highly dynamic maneuvers.
“The VECTOR-400 is not a product in isolation, rather it forms part of our global strategy. Some of its main features, such as the execution of completely automatic functions or its compact and easy to integrate software, which also allow it to be operated in case of data-link failure, are already used in other products in our autopilot family, such as the VECTOR-600” explained Webster.
In addition to its advanced technology, the VECTOR-400 benefits from the same stringent quality standards that UAV Navigation insists upon for all of its products. The company carries out rigorous calibration processes and acceptance testing on every single unit before it ships, together with its individual certificate of conformity.
UAV Navigation has designed the VECTOR-400 to meet MIL-STD 810 and MIL-STD 461 standards. The design and development of its software and hardware has been carried out in accordance with DO-178C, DO-254 and also ASTM F3201-16 — a certification available for unmanned aerial systems.
“Not all autopilots are able to control highly dynamic platforms; even fewer are able to carry out advanced, high-speed maneuvers and low-level flight such as sea-skimming,” Webster said. “That is why we are extremely pleased with this new product, which we believe meets a requirement in the market that had yet to be covered.”
UAV Navigation has developed a Visual Navigation System (VNS) that reduces the accumulated positional error during dead-reckoning navigation. The VNS leverages visual odometry techniques to determine the position and orientation of the aircraft by analyzing and processing the images captured by a camera installed on its underside.
Initial testing in real-time flight conditions has been a success, reports UAV Navigation. The system integrates well with the company’s flight-control solution to improve navigation in GNSS-denied environments.
Vector autopilot. (Photo: UAV Navigation)
UAV Navigation’s sensors are tolerant toward GNSS failures (typically, in GNSS-denied scenarios) and can operate in dead-reckoning mode without compromising flight safety. However, a prolonged GNSS failure can lead to a significant navigation drift, and this is where the VNS comes in.
The VNS system includes a simple belly-mounted camera and image processing computer. Images from the camera are processed by a lightweight onboard computer, translating them into a relative change in the aircraft position. This information can be combined with the inertial sensors to reduce the overall drift to < 1% of the distance traveled, eliminating any drift associated with time.
Combined with the Vector autopilot, the VNS components provide a complete and robust autonomous flight control and navigation solution.
UAV Navigation’s flight control solutions for remotely piloted air systems/unmanned aerial vehicles (RPAS/UAVs) are compatible with the Trimble UAS1 high-precision GNSS receiver. The core benefits of Trimble’s GNSS solution include centimeter-level precision and easy integration.
Image: UAV Navigation and Trimble
The light, small Trimble UAS1 receiver is less vulnerable to vibrations or temperature fluctuations, making it suitable for UAVs and RPAS. In addition, the receiver can provide real-time kinematic (RTK) positioning using a base station, enabling users to achieve higher precision for their projects.
Most UAV missions demand precision in its subsystems. The Trimble UAS1 receiver meets these requirements and includes a 336-channel high-precision GNSS engine. It tracks L1/L2 frequencies from the GPS, GLONASS, Galileo and BeiDou constellations.
The Trimble UAS1 supports OmniSTAR and Trimble CenterPoint RTX GNSS corrections, which enable precise and robust positioning without the use of a base station via a subscription service. The receiver also offers an industry-standard camera hot-shoe interface and a wide DC voltage range to work in a broad range of UAVs.
While Trimble is highly specialized in providing advanced GNSS solutions, UAV Navigation’s focus is on innovations in flight control systems. With this combined technology, current UAV/RPAS systems can now operate in more demanding environments and deliver higher precision through better navigation, UAV Navigation stated in a press release.
Q: Where is leading technology trending for UAV navigation in complex, unstructured, and uncertain (GNSS-denied) environments in industrial applications?
A: Tight integration between GNSS and inertial navigation systems (INS) can provide accurate, reliable navigation in GNSS-challenged environments, and advances in MEMS inertial technology continue to push the performance of systems that meet the size, weight and power requirements for UAV systems. These GNSS/INS sensors will continue to improve and form the core of the navigation system as additional navigation aids, such as computer vision, are added to address more demanding GNSS-denied applications.
Alexis Guinamard, Chief Technical Officer, SBG Systems
A: Industrial UAVs need trustworthy navigation units. Drastic sensor selection, thermal calibration, and signal processing techniques are mandatory to cope with high temperature / vibrating environments. Advanced algorithms design is also a key to make UAV navigation more reliable in challenging environments: An extended Kalman filter that fuses inertial and GNSS data maintains an accurate trajectory, even during GNSS outages. Next challenge is to get real-time inertial data fusion with GNSS, and vision or Lidar sensors!
Jan Van Hees, Director Business Development, Septentrio
A: Inertial sensors, vision and radar-based distance sensors provide positioning in GNSS-challenged environments. However, experience teaches that even there, GNSS signals can often be received, albeit intermittent or badly disturbed. And GNSS is still the easiest absolute positioning reference available. Therefore, much effort goes into developing robust GNSS technology with reliable quality information, which continues to play a crucial role in the positioning solution, fused with the aforementioned technologies.
 UAV Navigation is partnering with AnsuR Technologies to enable streaming high-definition (HD) video from small UAVs carrying a 200-kbps satcom terminal.
UAV Navigation is partnering with AnsuR Technologies to enable streaming high-definition (HD) video from small UAVs carrying a 200-kbps satcom terminal.