Focal Point Positioning, a U.K.-based developer of GNSS-enhancing software, has launched Precise+, a technology designed to deliver reliable high-precision positioning in environments where conventional carrier-phase tracking struggles. The company unveiled the technology at the 2026 European Navigation Conference in Vienna, Austria.
Precise+ extends the capabilities of the company’s patented Supercorrelation platform into the carrier-phase domain, targeting the cycle slips that can cause real-time kinematic (RTK) and precise point positioning (PPP) systems to lose lock in difficult environments.
Continuous carrier-phase lock is required for centimeter-level positioning. In dense urban areas, under tree cover and in multipath-heavy environments, interruptions can trigger cycle slips and force systems to reinitialize. According to the company, these disruptions remain a major obstacle for advanced driver-assistance systems (ADAS), automated driving and robotics applications.
Focal Point said Precise+ improves GNSS performance in challenging conditions, delivering sub-meter accuracy in scenarios where commercial receivers using live corrections typically produce multi-meter errors.
The company tested its software-defined Precise+ receiver in Thetford Forest, a common benchmark environment for GNSS testing under dense foliage. According to Focal Point, the system achieved 80 cm accuracy at the 99th percentile, meaning positioning error remained below 80 cm for 99% of measurements collected in the most difficult sections of the route. The company said competing state-of-the-art receivers produced errors greater than 3 m under the same conditions.
Focal Point noted the results were achieved using only receiver-level performance, without inertial sensors, dead reckoning or sensor fusion. The company said the improvements can be combined with additional technologies such as sensor fusion, RTK or PPP corrections.
“RTK and PPP deliver centimeter accuracy in open sky but degrade sharply where signals are disrupted by tree cover, buildings or multipath,” said Scott Pomerantz, CEO of Focal Point Positioning. “This limits deployment to a narrow slice of the road network, not the environments people actually drive in.”
“Meanwhile, correction services carry high recurring per-vehicle costs yet cannot fix what happens at the receiver when the signal environment degrades,” Pomerantz added. “This means OEMs pay for precise positioning that doesn’t function where it matters most.”
According to the company, Precise+ is designed for automotive applications including ADAS, automated driving and vehicle-to-everything (V2X) systems, as well as other applications requiring sustained high-precision GNSS performance outside open-sky conditions.
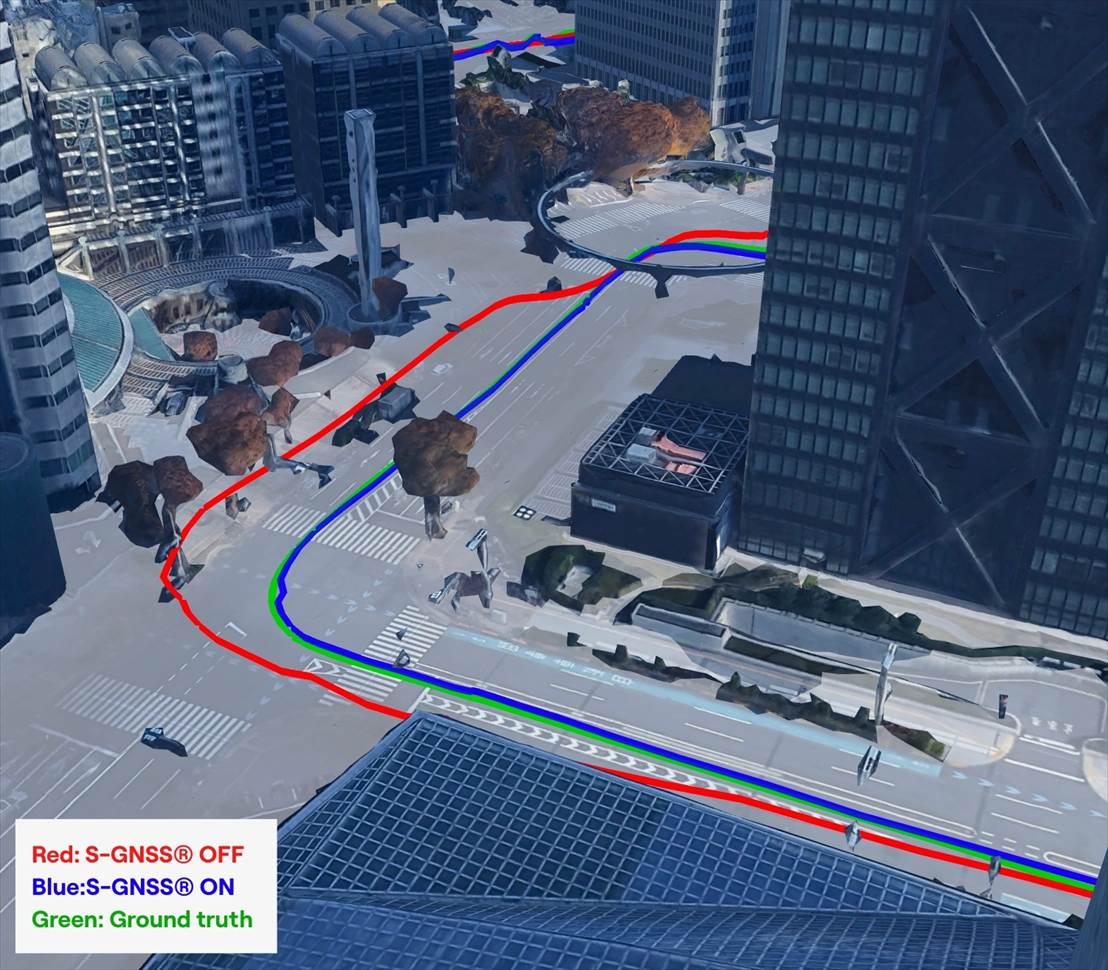
Crowded cities with stacked road systems and reflective architecture may offer impressive skylines, but for GNSS receivers, they create some of the harshest conditions on Earth. For technologies that depend on stable, trustworthy positioning, real-world testing in these challenging environments is essential. Here, Jez Ellis-Gray, product manager at Focal Point Positioning, a provider of GNSS positioning software, examines what recent field deployments reveal about the future of reliable GNSS.
Urban environments present unique constraints that no laboratory or simulation can perfectly replicate. A lab test may miss the thousands of variables that influence signal behaviour in a living, breathing city or a dense forest road. This matters most for automotive applications, where positioning must remain stable and trustworthy to support driver assistance and higher levels of automation. That is why we conducted field trials across Germany and Japan, evaluating FocalPoint’s S-GNSS Auto software running on STMicroelectronics’ Teseo GNSS receivers in challenging real-world conditions.
This testing demonstrated that GNSS performance in the real world is often determined not by peak accuracy under ideal conditions, but by the system’s reliability when satellite signals are distorted, reflected or partially obstructed.
This distinction — between accuracy and reliability — is becoming increasingly important for sectors where positioning plays a safety-critical role, including automotive.
Understanding the complexity of real environments
Germany’s combination of modern architecture and medieval street layouts made it a good place to test GNSS upgrades against standard technology. A city like Frankfurt offers a nice mix of glass facades, narrow streets and tall buildings – conditions that tend to create multipath interference.
During our recent field testing, conventional GNSS receivers frequently suffered from severe degradation of position accuracy when compared to a state-of-the-art ground truthing system. The standard receiver positions will often drift away from the travelled path, often through buildings or even onto parallel roads.
As accuracy deteriorates, the receiver can usually tell that the input information is poor, and output a warning for a larger estimate of error. This is a useful warning flag for AVs and allows for safe handover back to the human driver. However, in some cases, the reflected signals cause the miscalculation to be assumed correct. This “confident but wrong” GNSS is a much greater threat to autonomous driving, as the vehicle may make a dangerous decision based on this false information.
In contrast, the S-GNSS Auto enhanced receiver was able to maintain lane-level accuracy far longer, even in areas where intense reflections would normally overwhelm the satellite data. In multipath-heavy environments, S-GNSS on Teseo receivers showed an accuracy improvement of up to 4x. These findings reinforced our belief that, as automation increases, consistency and reliability will be more valuable than peak accuracy.
A navigation system that performs well on open motorways but struggles on urban roads will not scale safely to higher levels of vehicular automation. This is particularly relevant as the industry transitions from Level 2 to Level 3 autonomy, marking the point at which a vehicle takes full responsibility for the driving task in defined conditions, allowing the driver to disengage temporarily while the system manages safety-critical decisions.
This shift is expected to unlock significant commercial value. A 2023 report by McKinsey predicted that advanced driver assistance and autonomous driving features could generate between $300 billion and $400 billion in annual revenue by 2035, driven by software services and subscription-based functionality that depend heavily on reliable positioning. Unlocking this potential will depend on the next generation of vehicles having robust positioning systems, as users are unlikely to pay ongoing subscriptions to systems that repeatedly require human intervention or where safety concerns linger.
Japan: one of the world’s most challenging environments
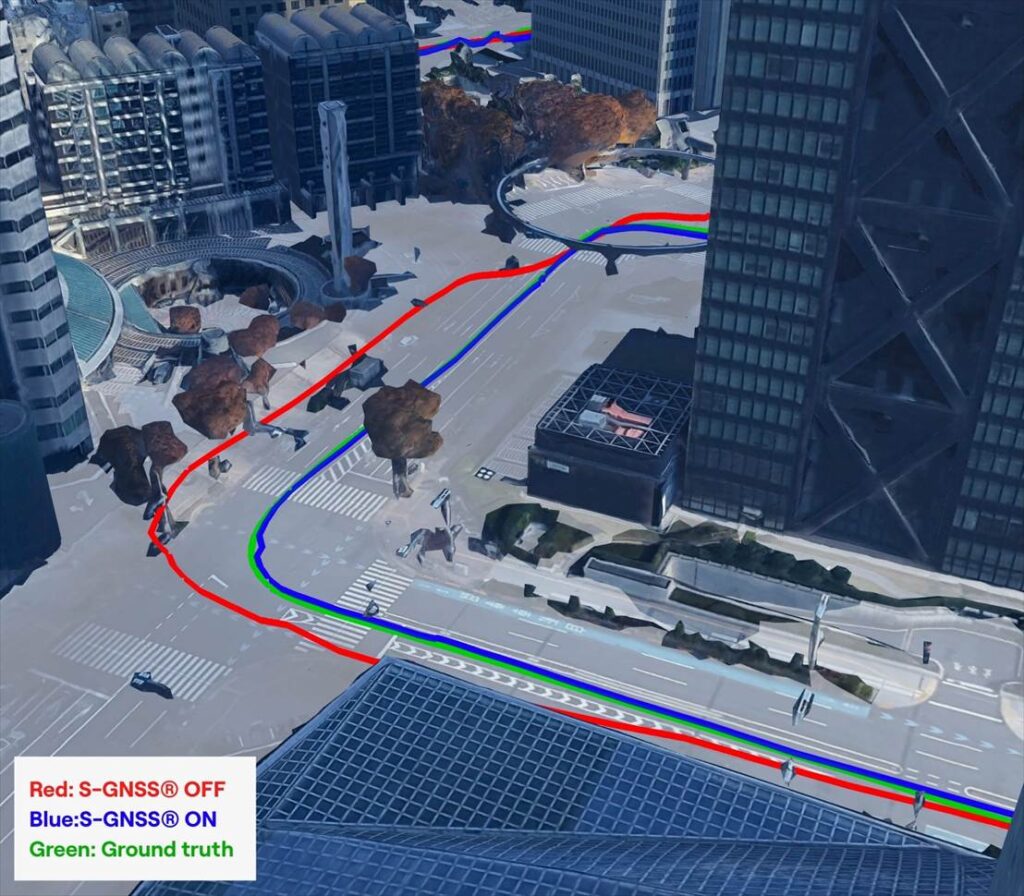
If Germany represents a demanding test bed, Japan pushes GNSS to the extreme. Tokyo offers some of the toughest conditions anywhere in the world due to its towering buildings, multilevel road networks and narrow corridors that create intense multipath environments, so it was a natural choice for our next field test.
The results showed that in particularly dense districts such as Shinjuku, standard GNSS receivers often struggled to maintain a coherent position solution. Reflections from glass towers, elevated highways and rail lines produced non-line-of-sight signals that overwhelmed conventional algorithms.
S-GNSS Auto, integrated onto STMicroelectronics’ Teseo receivers, demonstrating improvements in vehicle positioning accuracy. (Data from Shinjuku, Tokyo)
However, receivers equipped with S-GNSS’s advanced signal-processing techniques demonstrated significantly improved performance. These upgraded devices maintained a stable positioning where traditional systems faltered, avoiding errors that would cause an automated system to disengage or provide dangerously erroneous positions
This improved reliability has direct implications for safety and user experience, which vehicle OEMs will no doubt welcome. In driverless vehicles, GNSS problems that trigger sudden driver handovers or interruptions to hands-free modes, are likely to erode trust and reduce the likelihood of subscription renewals, as the end user will judge the product less by its peak performance and more by its dependability in everyday situations.
Field testing and the future of positioning technology
As cities evolve, buildings grow taller and mobility systems become more congested, the challenges facing GNSS will only increase. As such, automotive OEMs are rightly starting to demand real world results, not just in ideal conditions (static, open sky) but in the worst conditions.
Manufacturers increasingly recognise that positioning is now a foundational technology that underpins safety, automation and customer experience. Investments in more reliable GNSS systems are therefore not marginal enhancements but essential enablers of future services. For companies developing navigation and sensing technology, real-world testing offers a unique opportunity to understand how systems react to chaotic, imperfect environments. It provides granular insight into where and why positioning fails, and how these software-based enhancements can bridge the gap. By validating these solutions in the world’s toughest GNSS environments, developers can offer manufacturers greater confidence in deploying advanced features across global markets.
You can request an evaluation kit here or download the full results report of our latest testing here.
Tallysman Wireless has added a line of AccuAuto vehicle antennas aimed at the autonomous vehicle market.
The compact and rugged embedded AccuAuto antennas offer key features not available in other embedded autonomous vehicles antennas on the market, the company said.
The automobile industry is transitioning from offering GNSS-assisted navigation where the accuracy requirement is ±3 to 5 meters (low-precision GNSS code positioning) to providing driver assistance (such as lane-keeping) and autonomous vehicle navigation where the accuracy requirement is < 0.1 meters (such as high-precision GNSS phase positioning).
Current roof-mounted GNSS antennas on most vehicles provide the accuracy required for navigation but they lack the precision required for assisted driving or autonomous vehicle operation. Tallysman’s new line of AccuAuto antennas are designed to provide strong clean code and phase signals that enable high-precision real-time kinematic (RTK) and precise point positioning (PPP) navigation.
The Tallysman embedded AccuAuto vehicle antenna features a patented Tallysman Accutenna technology multi-constellation and multi-frequency antenna element, an integrated ground plane, radome and underside cover that provides mist and condensation protection.
The bottom cover also supports the antenna cable and mitigates cable vibration to ensure the antenna has a long service life, while the ground plane improves antenna performance.
All AccuAuto antenna electronic components are Automotive Electronics Council (AEC) certified and are designed to perform under challenging environmental conditions, such as extreme temperatures (–40 °C to +125 °C) and continuous shock and vibration.
Signal quality is improved with a deep pre-filter that minimizes out-of-band noise and maximizes in-band reception. This feature enables reliable GNSS signal reception in challenging urban environments, where inter-modulated signal interference from LTE and other cellular bands is common.
The triple-band TWA928 supports GPS/QZSS-L1/L2/L5, GLONASS-G1/G2/G3, Galileo-E1/E5a/E5b, BeiDou-B1/B2/B2a, and NavIC-L5 signals and frequency bands (the TWA928L includes support for L-band correction services).
By Daniela E. Sánchez, Harvey C. Gómez and Thomas Pany, Institute of Space Technology and Space Applications (ISTA)
This paper presents how our system, consisting of a GNSS receiver antenna, an inertial measurement unit (IMU) and a lidar, is used to obtain high-precision maps through the geo-referencing of lidar point clouds. An accuracy assessment of the system is conducted, which also gives us insights on the quality of lidar range measurements for autonomous driving applications.
The assessment is done by geo-referencing the obtained point clouds of extracted buildings and comparing them against a supporting measuring system like a total station. The building extraction is done by performing an approximation of the mathematical model of a plane to the facades that composes the building in both, the lidar and the supporting measurement system data.
The paper also indicates the proposed pose determination method of a mobile agent using lidar data. Thanks to the advantages of active, 3D sensors, diverse objects in the environment can be detected as individual point sets, or clusters. Each of the segmented objects can be used as a landmark to figure how the agent is located with respect to those structural elements. The algorithm is capable of detecting the clusters in one point cloud, and finding the most alike point set on a subsequent scan. This is achieved by comparing global descriptors for point cloud data.
The Ensemble of Shape Functions (ESF) is selected as the cluster descriptor. The cluster matching is performed by comparing the clusters one-to-one, calculating the minimum Chi-squared distance among their descriptors. The smaller this distance, the greater the probability of being the same cluster in distinct epochs.
Figure 2. Direct geo-referencing of lidar data at different times. (Image: Authors)
The resultant cluster correspondences for the whole point cloud allow finding the rigid transformation between the point clouds. An initial coarse alignment among the clouds based on the centroids of each matched cluster was performed, followed by a fine alignment in order to reduce errors by the use of the Iterative Closest Point (ICP) algorithm. This approach is valid for urban environments, or for those where many objects can be segmented as clusters.
Finally, a practical case is described in order to show how we plan to use the outcome of the highly precise geo-referenced point clouds and the pose estimation method using lidar.
The BYes “GetYourSpace” service collects and analyzes lighting in urban environments using a GIS-based approach and the Trimble MB-TWO GNSS module.
One of the most visible services provided by cities and municipalities is the illumination of streets and public spaces. To optimize the use of public funds, cities need timely, comprehensive information on how their lighting systems are working. Operators use the data to monitor system performance and plan maintenance, repairs and upgrades.
Gathering data on street lighting is often performed manually. Technicians carrying photometers and clipboards visit individual light poles to collect information on the lighting output. The work, which must be performed at night, is slow and labor-intensive and can pose safety issues for the field technicians.
GetYourSpace debuts
GetYourSpace platform: The white G-Nav smart antenna contains the Trimble MB-TWO GNSS module. (Photo: Trimble)
The French company Bouygues Energies & Services (BYes) provides solutions that help cities operate efficiently. The company recognized the need for a mobile, automated system to collect lighting data and produce results accessible by a variety of users.
The opportunity evolved into the BYes “GetYourSpace” service, which collects and analyzes lighting and other facets of urban environments. It uses a GIS-based approach to provide mapping and visualization functions.
BYes set out to develop a compact platform that could detect and measure sources and characteristics of light. To present information using GIS, the GetYourSpace platform needed to include reliable geolocation. BYes called on Cadden, a French developer of location systems for marine and industrial applications, to provide the positioning component for the GetYourSpace platform.
Reliable geolocation
MB-Two module by Trimble.
For the GetYourSpace collaboration, Cadden proposed a version of its G-Nav smart antenna, a product from Cadden’s GEOD brand. The G-Nav is built around a Trimble MB-TWO compact OEM GNSS module, an advanced GNSS receiver in a compact form designed for easy integration. The MB-TWO provides a range of GNSS configuration options, which allowed Cadden to produce a positioning system tailored to the BYes requirements.
The communications ability of the MB-TWO enabled Cadden to streamline the development process. The module provides multiple input/output options and can be configured and controlled using a web interface as well as a simple ASCII command set. Cadden leveraged the module’s small size and low power requirements to embed it into a compact, robust GNSS unit that combines power and data into a single connection.
High-speed data collection
Heat map of lighting data collected by GetYourSpace. Accurate geolocation is essential to producing easy-to-use results. (Image: BYes, Trimble)
Cadden’s implementation of Trimble GNSS provided key enabling technology for GetYourSpace. With an area of 1 square meter, the mobile platform includes the GNSS, light and environmental sensors, system controller and data logging.
The MB-TWO rapid update rate (up to 50 Hz) enables the GetYourSpace platform to capture accurate information even while moving at high speed. The low-power, lightweight platform can be mounted on a small car or towed behind a bicycle and requires minimal interaction with the operator or driver.