Inertial Labs has released a remote sensing payload instrument. The Resepi Hesai XT32 laser is designed for accurate remote-sensing applications. The Resepi laser can be used with commercially available lidar scanners, including Velodyne, Quanergy, Ouster, RIEGL, LIVOX and Hesai, as well as with UAVs.
Resepi is completely modular, so users have full control for customization. The remote sensing device uses a GPS-aided inertial navigation system with NovAtel RTK/PPK single- or dual-antenna GNSS receiver, integrated with a Linux-based processing platform. It also comes with a 2 TB USB memory drive and has an embedded Wi-Fi cellular modem.
Resepi has 3-5 cm point-cloud accuracy and can reach heights of more than 200 m above ground level. It is compatible with most UAV models; however, it is typically used with DJI M300, DJI M210 or DJI M600 models.
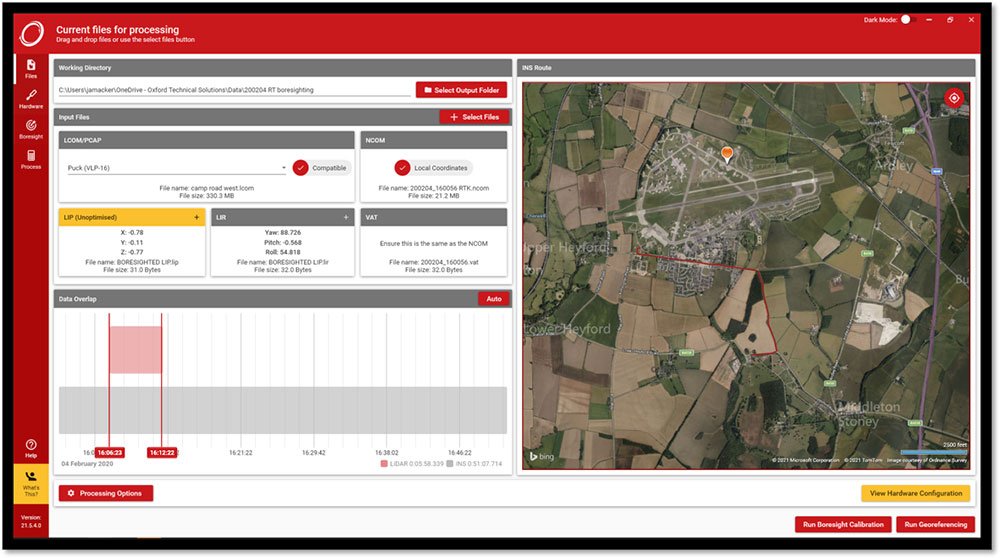
The device is suitable for scanning and mapping, precision agriculture with lidar, simultaneous localization and mapping (SLAM) algorithm development, utility inspection and construction site monitoring. Resepi-supported software includes Hexagon NovAtel, PCPainter and PCMaster.