How will wireless technologies most significantly drive change and innovation in the surveying industry?
Miguel Amor
“GNSS by design, by physics, will always be challenged in urban settings. 5G and GNSS will provide a step to ubiquitous positioning in built-up areas — a blend of relative and absolute positioning, terrestrial and satellite-based measurements.” Miguel Amor Hexagon Positioning Intelligence
Greg Turetzky
“The improvements in bandwidth and latency of 5G will create new opportunities for edge and cloud-based computing advances such as AI and machine learning to penetrate surveying, as 5G is doing in other industries, to improve efficiency, accuracy and automation.” Greg Turetzky Consultant
Members of the EAB
Tony Agresta Nearmap
Miguel Amor Hexagon Positioning Intelligence
Thibault Bonnevie SBG Systems
Alison Brown NAVSYS Corporation
Ismael Colomina GeoNumerics
Clem Driscoll C.J. Driscoll & Associates
John Fischer Orolia
Ellen Hall Spirent Federal Systems
Jules McNeff Overlook Systems Technologies, Inc.
Terry Moore University of Nottingham
Bradford W. Parkinson Stanford Center for Position, Navigation and Time
With 106 operational GNSS satellites flying today (or was that yesterday’s number?) satnav’s backbone is robust, variegated, supportive of growth across many industries — and poised to leverage even more prosperity. I’ve seen forecasts of as many as 400 satellites, well beyond GNSS proper and involving low-Earth orbit telcomm constellations, constantly patrolling space above us and beaming down positioning, navigation and timing (PNT) intelligence.
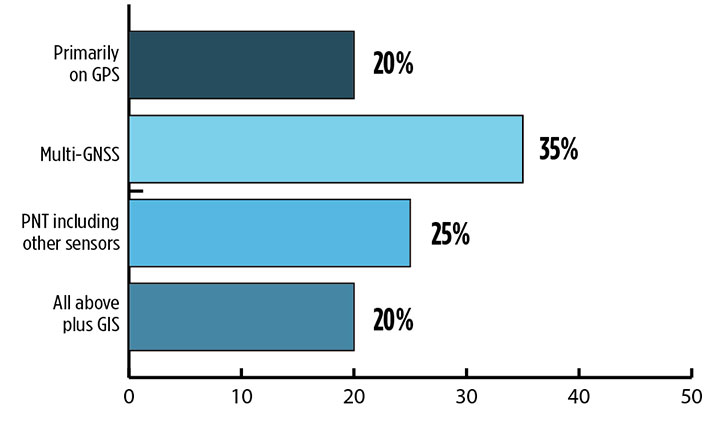
Where do you see your efforts focusing primarilly over the next decade? (Source: GPS World’s 2018 State of the Industry survey)
A draft headline for the cover of this issue — The Sky’s the Limit! — actually underestimated. Not even the sky is the limit.
Mobile. GNSS-enabled tablets and smartphones provide navigation, traffic and congestion maps to billions. These features will continue to drive demand for GNSS in all electronic equipment. As we move from the internet to the internet of things (IoT) as the dominant paradigm of advanced and developing societies, GNSS will boom louder than we have heretofore known it to do.
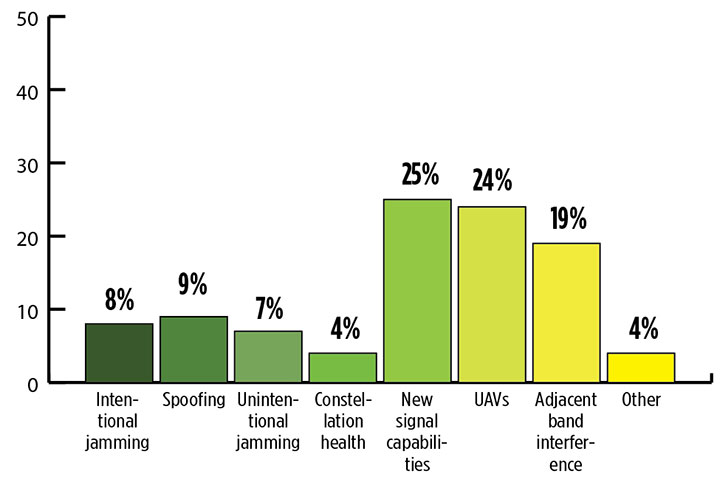
What is the industry “Issue of the Year?” (Source: GPS World’s 2018 State of the Industry survey)
Communication and location-enabled transportation services such as Lyft and Uber provide only one example of novel GNSS uses that have become the norm.
Tracking devices, whether personal, vehicular, or affixed to large assets, constitute a quiet though muscular growth market. The GPS tracking device generates high demand from industries such as information technology (IT), transportation, and telecommunication, providing real-time intelligence and advance diagnoses about products, vehicles and people, valued by consumers and businesses, enhancing security and safety — key concerns that will only grow in an increasingly vulnerable world.
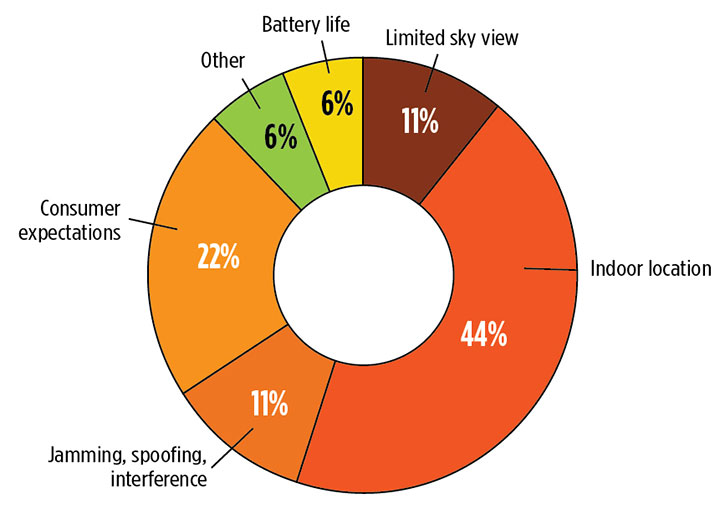
What is the key challenge for positioning and navigation in the wireless and consumer space? (Source: GPS World’s 2018 State of the Industry survey)
Volume! The GPS tracking segment alone is expected to reach $2.53 billion by 2023, nearly 12% annual growth. Other mobile segments will increase in parallel. Don’t be deceived by the low-cost of low-accuracy tracking devices. Volume! Volume! Volume! is just as powerful a mantra as Location! Location! Location!
With the wireless carriers and IoT behind it, GNSS will see growth a-plenty and virtually no downside. U.S. cell carriers are now selling access to your real-time phone location data, a key signal that economic giants put high value on the technology.
For more results from the 2018 State of the GNSS Industry, see this page.
Modules featuring Altair’s ALT1250 CAT-M1/NB1 chipset will be demonstrated at Mobile World Congress.
Altair Semiconductor, a provider of LTE chipsets, has selected Rohde & Schwarz as its partner for test equipment for its dual-mode CAT-M1/NB1 internet of things (IoT) ALT1250 chipset, as well as its next-generation IoT chipsets.
The ALT1250 is a highly integrated dual-mode CAT-M1/NB-IoT chipset with GNSS. Modules with ALT1250 inside are the world’s smallest, and may be as small as 100 millimeters square in area.
The ALT1250 includes GNSS location positioning, a wideband RF front-end supporting all commercial LTE bands within a single hardware design, a multi-layered and hardware-based security framework, an internal application subsystem and packaging that enables standard, low-cost PCB manufacturing.
The Rohde & Schwarz R&S CMW500 test platform offers the most validated CAT-M1/NB-IoT protocol conformance tests. It allows manufacturers and test houses to use a single instrument to verify that chipsets, modules and devices comply with GCF and PTCRB standards, and specific network operator requirements.
The test equipment will be used for protocol testing as well as RF, RRM performance and carrier tests.
Rohde & Schwarz is a global manufacturer of wireless communications and EMC test and measurement equipment and plans to develop new testing protocols for Altair’s next generations of cellular IoT chipsets.
“Our ALT1250 chipset is already forming the foundation for multiple current and emerging IoT applications,” said Ilan Reingold, VP of business development and marketing for Altair. “The choice of Rohde & Schwarz is part of our commitment to the highest quality of advanced validation and performance testing for our game-changing products.”
“This announcement confirms the commitment of Rohde & Schwarz to the wireless industry to provide innovative test tools and solutions that allow the testing and certification of cellular IoT devices,” said Anton Messmer, vice president, mobile radio testers, for Rohde & Schwarz. “We are pleased to have been selected by Altair and are looking forward to supporting them in the development of highly integrated chipsets in conformance with 3GPP Release-13 standards for CAT-M1 and NB-IoT, and beyond.”
Altair will be demonstrating partner modules based on ALT1250 at Mobile World Congress (MWC) in Barcelona, Spain, Feb. 26 to March 1 at Altair meeting rooms in Hall 2, Stands 2B2Ex and 2B4Ex.
Rohde & Schwarz will showcase CAT-M1/NB-IoT test solutions with the R&S CMW500 at MWC in hall 6, booth 6C40.
Fractus Antennas has launched a mobile antenna that enables coverage at 3G, 4G and 5G — the TRIO mXTEND chip antenna component.
The TRIO mXTEND has been specifically designed to provide flexibility to operate any required frequency band inside any wireless device.
It is capable of operating the main mobile communication standards, enabling worldwide coverage, as well as GNSS such as GPS, GLONASS and BeiDou (1561 MHz, 1575 MHz and 1598-1606 MHz) and the main short range wireless bands such as Bluetooth and Wi-Fi (2400-2500MHz and 4900-5875MHz) through the same antenna component.
The TRIO mXTEND is a modular, multiband and multi-port antenna component that enables top-quality worldwide coverage at any mobile communication standard. Its reconfigurable and off-the-shelf nature allows multiple architectures so the antenna component can be assembled into any mobile or IoT device.
It has been designed for providing mobile operation in three different frequency regions: 698-960 MHz, 1710-2690 MHz and 3400-3800 MHz. In addition, TRIO mXTEND is presented in an ultra slim component of 1 millimeter that enables easy placement into any device.
The Fractus Antennas team will be at Mobile World Congress in Barcelona, either at the venue or in Fractus Antennas Headquarters, which is based in the city. Those interested are invited to arrange a meeting.
Facebook’s Open Cellular group is developing a cost-effective, software-defined, wireless-access platform to improve connectivity in remote areas of the world, the company said.
The TW2643POC employs Tallysman’s Accutenna technology in a magnet mount, passive right-hand circularly polarized antenna for the reception of all of the GNSS constellations (GPS L1/GLONASS G1/ Galileo E1/ BeiDou B1) plus Iridum: 1559 to 1626.5 MHz frequency band.
According to Tallysman, it is certified and specially designed to maximize the performance of Iridium Voice and Data Modems plus the upper GNSS band (1559–1606 MHz).
The TW2643POC is housed in an IP67 compliant housing and is REACH and RoHS compliant.
Integrations of MEMS sensors with signal conditioning and radio communications form “motes” with extremely low-cost and low-power requirements and miniaturized form factor. Now standard features in modern mobile devices, MEMS accelerometers and gyros can be combined with absolute positioning technologies, such as GNSS or other wireless technologies, for user localization.
Navigation has been revolutionized by micro-electro-mechanical systems (MEMS) sensor development, offering new capabilities for wireless positioning technologies and their integration into modern smartphones.
These new technologies range from simple IrDA using infrared light for short-range, point-to-point communications, to wireless personal area network (WPAN) for short range, point-to multi-point communications, such as Bluetooth and ZigBee, to mid-range, multi-hop wireless local area network (WLAN, also known as wireless fidelity or Wi-Fi), to long-distance cellular phone systems, such as GSM/GPRS and CDMA.
With these technologies, navigation itself has become much broader than just providing a solution to location-based services (LBS) questions, such as “Where am I?” or “How to get from start point to destination?”
It has moved into new areas such as games, geolocation, mobile mapping, virtual reality, tracking, health monitoring and context awareness.
MEMS sensors are now essential components of modern smartphones and tablets. Miniaturized devices and structures produced with micro-fabrication techniques, their physical dimensions range from less than 1 micrometer (μm, a millionth of a meter) to several millimeters (mm).
The types of MEMS devices vary from relatively simple structures having no moving elements to complex electromechanical systems with multiple moving elements under the control of integrated microelectronics.
Apart from size reduction, MEMS technology offers other benefits such as batch production and cost reduction, power (voltage) reduction, ruggedization and design flexibility, within limits.
Wireless sensor technology allows MEMS sensors to be integrated with signal-conditioning and radio units to form “motes” with extremely low cost, small size and low power requirements.
New miniaturized sensors and actuators based on MEMS are available on the market or in the development stage.
Today’s smartphone sensors can include MEMS-based accelerometers, microphones, gyroscopes, temperature and humidity sensors, light sensors, proximity and touch sensors, image sensors, magnetometers, barometric pressure sensors and capacitive fingerprint sensors, all integrated to wireless sensor nodes.
These sensors were not initially intended for navigation. For instance, accelerometers are used primarily for applications such as switching the display from landscape to portrait as well as gaming.
These embedded sensors, however, are natural candidates for sensing user context. Because of their locating capabilities, people are getting used to the location-enabled life.
MEMS accelerometers and gyros, for instance, can be employed for localization in combination with absolute positioning technologies, such as GNSS or other wireless technologies.
WIRELESS OPTIONS IN SMARTPHONES
Various wireless standards have been established. Among them, the standards for Wi-Fi, IEEE 802.11b and wireless PAN, IEEE 802.15.1 (Bluetooth) and IEEE 802.15.4 (ZigBee) are used more widely for measurement and automation applications.
All these standards use the instrumentation, scientific and medical (ISM) radio bands, including the sub-GHz bands of 902–928 MHz (US), 868–870 MHz (Europe), 433.05–434.79 MHz (US and Europe) and 314–316 MHz (Japan) and the GHz bands of 2.4000-2.4835 GHz (worldwide acceptable).
In general, a lower frequency allows a longer transmission range and a stronger capability to penetrate through walls and glass.
However, due to the fact that radio waves with lower frequencies are more easily absorbed by materials, such as water and trees, and that radio waves with higher frequencies are easier to scatter, effective transmission distance for signals carried by a high-frequency radio wave may not necessarily be shorter than that of a lower frequency carrier at the same power rating.
The 2.4-GHz band has a wider bandwidth that allows more channels and frequency hopping and permits compact antennas.
Wireless Fidelity. Wi-Fi (IEEE 802.11) is a flexible data communication protocol implemented to extend or substitute for a wired local area network, such as Ethernet. The bandwidth of 802.11b is 11 Mbits and it operates at 2.4 GHz frequency.
Originally a technology for short-range wireless data communication, it is typically deployed as an ad-hoc network in a hot-spot. Wireless networks are built by attaching an access point (AP) to the edge of a wired network.
Clients communicate with the AP using a wireless network adapter similar to an Ethernet adapter. Beacon frames are transmitted in IEEE 802.11 Wi-Fi for network identification, broadcasting network capabilities, synchronization and other control and management purposes.
Timers of all terminals are synchronized to the AP clock by the timestamp information of the beacon frames. The IEEE 802.11 MAC (Media Access Control) protocol utilizes carrier sensing contention based on energy detection or signal quality.
RSSs and MAC addresses of the APs are location-dependent information that can be adopted for positioning. For localization of a mobile device, either cell-based solutions or (tri)lateration and location fingerprinting are commonly employed.
Bluetooth. A wireless protocol for short-range communication, Bluetooth (IEEE 802.15.1) uses the 2.4-Hz, 915-MHz and 868-MHz ISM radio bands to communicate at 1 Mbit between up to eight devices. It is mainly designed to maximize the ad-hoc networking functionality (Wang et al., 2006).
Compared to Wi-Fi, the gross bit rate is lower (1 Mbps), and the range is shorter (typically around 10 m). On the other hand, Bluetooth is a “lighter” standard, highly ubiquitous (embedded in most phones) and supports several other networking services in addition to IP. For positioning either tags (small size transceivers) or Bluetooth low energy (BLE) iBeacons are common.
Each tag has a unique ID that can be used for localization. iBeacon is a low-energy protocol developed by Apple; compatible hardware transmitters, typically so-called beacons, broadcast their identifier to nearby portable electronic devices.
The technology enables smartphones, tablets and other devices to perform actions when in close proximity to an iBeacon whereby a universally unique identifier picked up by a compatible app or operating system is transmitted.
The identifier and several bytes sent with it can be used to determine the device’s physical location, track customers, or trigger an LBS action on the device such as a check-in on social media or a push notification.
One application is distributing messages at a specific point of interest — for example, a store, a bus stop, a room or a more specific location like a piece of furniture or a vending machine. This is similar to previously used geopush technology based on GNSS, but with a much reduced impact on battery life and much extended precision.
Another application is an indoor positioning system, which helps smartphones determine their approximate location or context. With the help of an iBeacon, a smartphone’s software can approximately find its relative location to an iBeacon.
iBeacon differs from some other LBS technologies as the broadcasting device (beacon) is only a one-way transmitter to the receiving smartphone, and necessitates a specific app installed on the device to interact with the beacons.
This ensures that only the installed app (not the iBeacon transmitter) can track users, potentially against their will, as they passively walk around the transmitters. Localization is based on proximity sensing and cell-based solutions.
ZigBee. ZigBee is an IEEE 802.15.4-based specification for a suite of high-level communication protocols used to create personal area networks with small, low-power digital radios.
ZigBee operates in the ISM radio bands: 2.4 GHz in most jurisdictions worldwide, 784 MHz in China, 868 MHz in Europe and 915 MHz in the U.S. and Australia. Data rates vary from 20 kbit/s (868-MHz band) to 250 kbit/s (2.4-GHz band).
It adds network, security and application software and is intended to be simpler and less expensive than other WPANs such as Bluetooth or Wi-Fi.
Owing to its low power consumption and simple networking configuration, ZigBee is best suited for intermittent data transmissions from a sensor or input device.
Applications include wireless light switches, electrical meters with in-home displays, traffic management systems and other consumer and industrial equipment that requires short-range low-rate wireless data transfer.
Distances are limited to 10–100 m line-of-sight, depending on power output and environmental characteristics. ZigBee localization techniques usually use measurement of signal strength (RSS-based positioning) in conjunction with (tri)lateration and fingerprinting.
COMPARING STANDARDS
Table 1 compares the three wireless standards most suitable for a wireless sensor network. The standards also address the network issues for wireless sensors. Three types of networks (star, hybrid and mesh) have been developed and standardized.
TABLE 1. Comparison of Wi-Fi, Bluetooth and ZigBee.
Bluetooth uses star networks, composed of piconets and scatternets. Each piconet connects one master node with up to seven slave nodes, whereas each scatternet connects multiple piconets, to form an ad-hoc network. ZigBee uses hybrid star networks of multiple master nodes with routing capabilities to connect slave nodes, which have no routing capability.
The most efficient networking technology uses peer-to-peer mesh networks, which allow all the nodes in the network to have routing capability. Mesh networks allow autonomous nodes to self-assemble into the network and allow sensor information to propagate across the network with high reliability and over an extended range.
They also allow time synchronization and low power consumption for the “listeners” in the network, thus extending battery life. When a large number of wireless sensors need to be networked, several levels of networking may be combined.
For example, an IEEE 802.11 (Wi-Fi) mesh network comprised of high-end nodes, such as gateway units, can be overlaid on a ZigBee sensor network to maintain a high level of network performance.
A remote application server (RAS) can also be deployed in the field close to a localized sensor network to manage the network, to collect localized data, to host web-based applications, to remotely access the cellular network via a GSM/GPRS or a CDMA-based modem and, in turn, to access the internet and remote users.
ESTIMATION METHODS
The three most common position estimation methods are cell-based positioning (cell-of-origin, CoO), (tri) lateration and location fingerprinting, regarding achievable positioning accuracies as well as their advantages and disadvantages.
They provide different level of accuracies ranging from dm up to tens of m. Compared to (tri)lateration and fingerprinting, the principle of operation of CoO is the most straightforward and simplest. Disadvantages range from the requirement of a large number of devices or receivers as well as their performance in dynamic environments.
All these techniques provide absolute localization capabilities. Their disadvantage is that position fixes are lost if no coverage or signal availability is available.
Thus, combination with other technologies to bridge loss of lock of wireless signals (for example, no GNSS reception) is required. In smartphones, motion sensors exists that can be employed for inertial navigation (IN). In this article, these sensors are also referred to as inertial sensors.
In the simplest case, a position solution can be obtained from the relative measurements of the inertial sensors via dead reckoning (DR). The accelerometers, for instance, can be used by a pedestrian to count steps while walking and the gyroscope and magnetometer can provide the direction of movement.
These sensors have therefore substantially won on importance for navigation solutions.
MEMS LOCATION SENSORS
For many navigation applications, improved accuracy and performance is not necessarily the most important issue, but meeting performance at reduced cost and size is.
In particular, small navigation sensor size allows the introduction of guidance, navigation and control into applications previously considered out of reach. In this context, the small size, extreme ruggedness and potential for very low-cost and weight means of MEMS gyros and accelerometers have been, and will be, able to utilize inertial guidance systems — a situation that was unthinkable before MEMS.
The reduction in size of the sensing elements, however, creates challenges for attaining good performance. In general, the performance of MEMS inertial measurement units (IMUs) continues to be limited by gyro performance, which is typically around 10 to 30 deg/h, rather than by accelerometer performance, which has demonstrated tens of micro-g or better.
MEMS has struggled to reach high-accuracy tactical-grade quality.
MEMS Accelerometors. MEMS accelerometers are either pendulous/displacement mass type or resonator type. The former use closed-loop capacitive sensing and electrostatic forcing while the latter are based on resonance operation.
Both can detect acceleration in two primary ways: either displacement of a hinged or flexure-supported proof mass under acceleration, producing a change in a capacitive or piezoelectric readout, or frequency change of a vibrating element caused by a change in its tension induced by a change of loading from a seismic-proof mass.
Pendulous types can meet a wide performance range from 1 mg for tactical systems down to 25 μg. Resonant accelerometers or VBAs can reach higher performance down to 1 μg.
MEMS-Based Gyroscopes. For MEMS INS, attaining suitable gyro performance is more difficult to achieve than accelerometer performance. Fundamentally, MEMS gyros fall into four major areas: vibrating beams, vibrating plates, ring resonators and dithered accelerometers.
Gyroscopes are usually built as hybrid solutions, with sensor and electronics as two separate chips. The operational principle for all vibratory gyroscopes is based on the utilization of the Coriolis force.
If a mass is vibrated sinusoidally in a plane, and that plane is rotated at some angular rate Ω, then the Coriolis force causes the mass to vibrate sinusoidally perpendicular to the frame with amplitude proportional to the angular rate Ω.
Measurement of the Coriolis-induced motion provides knowledge of the angular rate Ω. This rate measurement is the underlying principle of all quartz and silicon micro-machined.
These gyroscopes are usually designed as an electronically driven resonator, which are often fabricated out of a single piece of quartz or silicon. The output is demodulated, amplified and digitized. Their extremely small size, combined with the strength of silicon, makes them ideal for very high-acceleration applications.
For purely surface micro-mechanical gyroscopes, given their small sizes and capacitances, monolithic integration is an option to be considered not so much for cost as for performance.
Combined IMUs. Further interest in all-accelerometer systems, which are also referred to as gyro-free, arises because high-performing small gyroscopes are very difficult to produce. Two approaches are typically used. In the first, the Coriolis effect is utilized.
Typically, three opposing pairs of monolithic MEMS accelerometers are dithered on a vibrating structure (or rotated). This approach allows the detection of the angular rate Ω. In the second, the accelerometers are placed in fixed locations and used to measure angular acceleration.
In both approaches, the accelerometers also measure linear acceleration, enabling a full navigation solution. In the direct approach, however, the need to make one more integration step makes it more vulnerable to bias variations and noise, so the output errors grow by an order of magnitude faster over time than when using a conventional IMU.
However, these devices only provide tactical-grade performance, and are most useful in GNSS-aided applications. The concept of a navigation-grade all-accelerometer IMU requires accelerometers with accuracies on the order of nano-g’s or better, and with large separation distances.
Use of all-accelerometer navigation for GNSS-unavailable environments will likely require augmentation with other absolute positioning techniques. Further sensor size reductions are underway through the combination of two in-plane (x- and y-axis) and one out-of- plane (z-axis) sensors on one chip. These multi-axes gyroscopes and accelerometer chips produce IMUs as small as 0.2 cm3.
Barometric Sensors. Barometric pressure sensors embedded in smartphones and other mobile devices demand small size, low cost and high-accuracy performance. The key element of a pressure sensor is a diaphragm containing piezoresistors which can be formed by ion implantation or in-diffusion.
Applied pressure deflects the diaphragm and thereby changes the resistance of the piezoresistors. By arranging the piezoresistors in a Wheatstone bridge, an output signal voltage can be generated. The measurement sensitivity of the pressure sensor is determined by the strain at the bottom plane of the diaphragm, whereby larger strain leads to higher sensitivity.
These altimeters are increasingly used in smartphones and other navigation systems. They can enable altitude determination of the user, for example, to determine the correct floor in a multi-storey building.
Pedestrian Dead Reckoning (PDR). The MEMS accelerometers embedded in the mobile device can be used to estimate the distance traveled from the accelerations made while walking, and magnetometers and gyroscopes to obtain user heading. Starting from a known position, determined by GNSS or other absolute positioning technique, the current position of the user can then be dead-reckoned using observations of the inertial sensors.
DR techniques differ from other localization techniques because the position is always calculated relative to the previously calculated position and no correlation with the real position can be made. PDR can give the best available information on position; however, it is subject to significant cumulative errors, i.e., either compounding, multiplicatively or exponentially, due to many factors as both velocity and direction must be accurately known at all instants for position to be determined accurately.
The accuracy of PDR can be increased significantly by using other, more reliable methods — GNSS or another absolute positioning technique such as Wi-Fi — the combination with inertial sensors produces more reliable and accurate navigation.
Altitude Determination. For navigation, determination of the altitude of the user can be of great importance, for example in determining the correct floor in a multi-storey building. Barometric pressure sensors can provide this data, augmenting the inertial sensors that can usually only provide reliable 2D localization.
Furthermore, if only three GNSS satellites are visible, providing a 2D positioning solution, pressure sensors can aid 3D localization.
Altitude determination with a barometric pressure sensor can be performed relatively from a given start height — for example, obtained from GNSS outside the building or from a known height point in the indoor environment.
As the user walks inside the building and up stairs or elevator to other floors, differences in air pressure can be calculated using a simple relationship between the pressure changes and height differences.
For conversion of the air pressure in a height difference, the mean value of the temperature at both stations is also required; MEMS infrared temperature sensors are increasingly found in smartphones to provide this.
Activity Detection. Low-cost inertial and motion sensors provide a new platform for dynamic activity pattern inference. Human activity recognition aims to recognize the motion of a person from a series of observations of the user’s body and environment.
A single biaxial accelerometer can classify six activities: walking, running, sitting, walking upstairs, walking downstairs and standing.
Until recently, sensors on the body have been used for activity detection, and until recently only a few studies have used a smartphone to collect data for activity recognition.
Smartphone accelerometers recognize acceleration in three axes as shown in Figure 1. Different motion sequences can thereby be ascertained.
Figure 1. Smartphone coordinate frame (left) and global horizontal coordinate system (right).
If a smartphone is held horizontally in the hand during a forward motion, then an acceleration in the y-axis is induced. When working with accelerations, two approaches can be applied to measure the linear displacement: integration of the accelerations or step detection combined with step size estimate.
In the first case, the distance traveled can be theoretically calculated by integrating the accelerations once for velocity, twice for distance.
Due to the double integration, however, any error in the signal will propagate rapidly, so the drift on the received signals from the accelerometer makes it impossible to use integration for walks of more than a few seconds.
The Zero Velocity Update (ZUPT) technique, where the velocity is reset to zero between every consecutive step when the foot is stationary for a small amount of time, can overcome this. Any error produced during one step has no influence on following steps. ZUPT can only be used when the accelerometer is placed on the foot, taking advantage of the stationary period between footsteps.
In the latter case, the distance traveled is obtained from step counts by processing the fluctuating vertical accelerations, which cross zero twice with every step. When the number of steps and the step size are acquired, the distance can be calculated by multiplication.
Figure 2 shows the recorded acceleration of a walking person in the z-axis, with significant maxima and minima that enable step-counting. Correction for the gravity effect on the x-, y- and z-axes of the smartphone’s local coordinate system is key to the correct determination of accelerometer-derived distance traveled. The MEMS-based three-axis accelerometer allows the device to detect the force applied along the three axes in order to accomplish specific functions based on predefined configurations.
Figure 2 . Typical recording of accelerometer sensor data in z-axis of a walking user.
The mobile device can be oriented in such that one of the axes is aligned in the direction of movement or heading (for example, y-axis), the positive x-axis is pointing rightward and the positive z-axis is upward (compare Figure 1). When the y-axis is horizontal, the gravity effect will be fully reflected on the z-axis.
However, a cell phone will most likely be placed by a user into a pocket or bag. Therefore, most existing step detection algorithms cannot be used directly — adjustments have to be made to take into account the orientation of the accelerometers. Because a phone can be placed with any side up or down, the accelerations are observed to determine which axis is the most vertical one.
The accelerations of the axis that is pointing directly to the center of the Earth has a value of 1 g due to gravity. So if the smartphone is lying flat on a table, with the display side up, then the z-axis of the accelerometer would theoretically have a value of 1,000 mg.
If the phone is put crooked (not along one of the axes) in someone’s pocket, the values will be lower than 1,000 mg. So to detect which accelerometer has the most vertical axis, the absolute average of the last 30 samples, or 1.2 seconds, of all three axes of the accelerometers of which the absolute value is closest to 1 g, is the most vertical axis and the accelerometer to use.
SYSTEM COMPARISON
Table 2 compares the most commonly used location sensors and systems in mobile devices classified depending on their positioning capability — absolute or relative — and on their type. A meaningful combination in form of a hybrid solution will produce the best performance for localization of a mobile smartphone user.
TABLE 2. Specifications of the most commonly used location sensors and systems in mobile devices.
Combining MEMS, Wireless. For the majority of indoor navigation systems, the combination of MEMS sensors and wireless options provides the optimal solution. MEMS sensors can provide relative positioning information, with an unbounded accumulation of location errors over time. Wireless systems provide an absolute position in either a local or global coordinate frame, independent of previous estimates without integrating measurements over time. The combination of these two technologies takes advantages of the strengths of both, producing a more robust position solution.
CONCLUSIONS
The increasing ubiquity of location-aware devices has pushed the need for robust GNSS-like positioning capabilities in difficult environments.
No single sensor or technique can meet the positioning requirements for the increasing number of safety- and liability-critical mass-market applications.
Integration is one approach to improving performance level, but a significant step change in high-performance positioning in GNSS-difficult environments, higher performance level are required from MEMS and wireless technologies.
ALLISON KEALY is a professor of geospatial science at Royal Melbourne Institute of Technolgy University, Australia. She holds a Ph.D. in GPS and geodesy from the University of Newcastle upon Tyne, UK. He is co-chair of FIG Working Group 5.5. Ubiquitous Positioning and vice president of the International Association of Geodesy (IAG) Commission 4: Positioning and Applications.
GÜNTHER RETSCHER is associate professor in geodesy and geoinformation at the Vienna University of Technology, with a Ph.D. in applied geodesy. He is co-chair of IAG Sub-Commission 4.1 on Emerging Positioning Technologies and GNSS Augmentation and of the IAG/Fig Working Group on Multi-Sensor Systems.
u-blox has announced ARM mbed OS 5 support for the ODIN-W2 wireless Internet of Things (IoT) gateway module and the NINA-B1 Bluetooth low energy module.
The ARM mbed OS 5 incorporates a real-time operating system (RTOS) in the core of the operating system. This open environment provides all the features needed to rapidly deploy and develop connected IoT products based on an ARM Cortex-M microcontroller, including security, connectivity and drivers for sensors and I/O devices. On existing u-blox ODIN-W2 and NINA-B1 hardware, customers can now rapidly develop wireless IoT applications making it easier to cut costs, development time and footprint, the company.
At ARM TechCon, held Oct. 26-27 in Santa Clara, California, u-blox will showcase the NINA-B1 and ODIN-W2 in a powerful and responsive IoT sensor-to-gateway-to-cloud scenario. In the live demonstration, the ODIN-W2 will read sensor data via Bluetooth low energy technology from NINA-B1-equipped sensors, and simultaneously stream it via Wi-Fi to an IBM cloud server, allowing for real-time data visualization and analysis.
“The unique combination of u-blox’s ODIN-W2 and NINA-B1 with ARM mbed OS 5 creates the best performing complete IoT architecture solution for applications from sensor data collection to flexible intelligent gateway processing and cloud connectivity, with full support for customer code — all based on the most proven embedded application platform,” said Hakan Svegerud, head of Product Strategy, Short Range Radio, at u-blox.
The already certified ODIN-W2, NINA-B1 and wireless stacks are designed for typical embedded applications, which require a small footprint implementation with responsive, high-performance hardware and an open CPU architecture. Usage scenarios include IoT, and medical and industrial applications, that use multiple sensors and/or smart gateways linked by Wi-Fi and Bluetooth. ODIN-W2’s 1-MB of flash memory offers ample space for all the customer software required to create a powerful gateway.
The ARM mbed development environment, with its extensive tools and libraries, gives embedded application designers and developers full access to each u-blox module’s ARM Cortex-M4 based microcontroller. This allows them to avoid the need for an external host CPU — not only saving bill of materials costs and development resources, but also keeping the board footprint to an absolute minimum.
In addition to providing a consistent development process across multiple products, this environment allows an extremely broad range of sensor and actuator-based IoT designs to be implemented on a single, compact, certified wireless module. Moreover, the u-blox open standard approach ensures ease of IoT connectivity, while still accelerating type approval certification by controlling access to the wireless stacks. All of these advantages combine to reduce time to market to a minimum.
GPS World is reporting live from CTIA Super Mobility 2016, which is being held Sept. 7-9 in Las Vegas, Nevada. CTIA’s flagship event is a convergence of everything wireless for professionals who work in the mobile technology industry, including leaders in wireless, indoor location, connected car and Internet of Things (IoT), among many others.
GPS World Senior Digital Editor Joelle Harms and Wireless editor Janice Partyka will be posting news, videos and photos this week on GPSWorld.com, Facebook and Twitter @GPSWorld.
This year’s highlights include keynote addresses from senior executives at AT&T, GSMA, Nokia, Qualcomm, Verizon, The Chernin Group, TIME Inc. and FCC. Mark Cuban, billionaire investor and owner of Dallas Mavericks, and John Legend, Academy Award and Grammy-winning musician, also will share insights on everything wireless, including next-gen 5G technology, the IoT and how mobile impacts the media, music and entertainment industries.
Sponsored by:Hemisphere GNSS
Broadcast Date: Thursday, September 19, 2013 Moderator: Janice Partyka, Wireless LBS Insider editor Speakers: David Jumpa, Chief Revenue Officer, Airbiquity;Scott McCormick, President, Connected Vehicle Trade Association; Andrew Maliszewski, Executive VP, Micronet;Scott Sedlik, VP Product and Marketing, Inrix
Summary: The biggest announcements and the most interesting news at the three big wireless/electronics shows in 2013 have all concerned the connected car. Location is a core technology. How will the connected vehicle market evolve? Will there be similarities to the more advanced fleet market? Providers of navigation, mapping, traffic, middleware, search, points of interest and mobile advertising all have key roles to play. How will the complexity of personalization and extras make it difficult to deliver products and service? The pace will only accelerate. Sort through the multiple issues and get your roadmap to the future with Janice Partyka and a panel of industry experts.
PoLTE Corporation has developed technology that harnesses the global long-term evolution (LTE) deployment to provide accurate and reliable location data.
Unlike localized solutions, such as Wi-Fi and Bluetooth, PoLTE’s technology leverages its Positioning over LTE (PoLTE) Macro software to achieve precision of 2 to 6 meters. The technology makes use of the sounding reference signals (SRS) embedded in an LTE handset user’s transmission. Using adapted radar location techniques, it converts portions of the LTE uplink signal into a probe signal.
The technology enables mobile network operators to deliver highly accurate location data to customers in indoor and outdoor environments.
Traditional macro cell location methods require at least three towers to see the user device to locate the device with precision. Historically, single tower deployments were limited in accuracy to the width of the sector created by the 120-degree antenna that was serving the user device. For example, at a distance of 1.5 kilometers from a base station, the cross range precision would be 4,000 meters. PoLTE Macro can improve the precision to less than 2 meters.
The benefits to leveraging network-based positioning include speed, flexibility, accuracy and data analytics. Customers for the technology include machine-to-machine and Internet of Things technologies, mobile advertising, crowd and customer tracking, and public safety.
Trimble has introduced a new grandmaster clock to address the synchronization needs of the fast growing next-generation LTE-Advanced and small cell network market. The Thunderbolt PTP Grandmaster Clock (GC), coming in the first quarter of 2016, was introduced at the ITSF 2015 Time and Synchronization in Telecoms Conference, held in Edinburgh, UK, Nov. 2-5.
Trimble said it value-engineered the industry-standard grandmaster clock, focusing on the features required in next-generation networks, including dual gigabit Ethernet ports and a small form-factor pluggable module port for optical connections. Its low price point enables network architects to move the timing source from the core to the edge of the network, enabling higher phase and frequency precision at the Precision Time Protocol (PTP) clients.
“Trimble entered this market to expand on our success in GNSS timing solutions for telecom networks,” said Karen Guldan, general manager of Trimble’s Time & Frequency Division. “The design and development of the GC focused on creating an optimized solution for network providers — at a price point of less than $2,000, it is intended to be a game-changer in small-cell network design. The GC’s features provide superior value to service providers.”
With flexible network interface protocols and easy integration, Trimble optimized the GC to deliver precise frequency and phase synchronization signals for LTE-Advanced and small cell networks supporting IEEE 1588 PTP, Network Time Protocol (NTP) and Synchronous Ethernet simultaneously. The GC supports up to 250 simultaneous PTP clients and 5,000 NTP transactions per second, and is designed for small- and medium-scale deployment.
With a small form factor of half rack 1RU, users may deploy the Trimble GC either indoors or outdoors. In a server room, the Trimble GC deploys in a side-by-side configuration to provide timing redundancy. For outdoor applications, the Trimble GMC also features an extended operating temperature range for use in non-typical networking environments such as a telecom cabinet. The Trimble GC configures for AC and DC power.
The GC was designed to provide continuous availability of traceable time. The GC includes an embedded, multi-GNSS (GPS, GLONASS, BeiDou and Galileo-ready) receiver to generate precise 10MHz and pulse per second outputs. Utilizing the latest in GNSS technology combined with a precision oscillator, the GC provides better than 3 microsecond phase holdover over a 24-hour period.
The Trimble Thunderbolt PTP Grandmaster Clock is expected to be available in the first quarter of 2016.
EndRun Technologies has launched two GPS-based timing products.
Meridian II Precision TimeBase.
The Meridian II Precision TimeBase references GPS to provide ultra-accurate time (10 nanoseconds to UTC) and frequency. At the core of Meridian II is a new GPS receiver that EndRun optimized to deliver a variety of traditional- and network-based time and frequency signals.
“The second-generation Meridian II continues EndRun’s heritage of pushing the envelope by delivering an industry-best, UTC time accuracy of 10 nanoseconds.” said Ron Holm, marketing manager, EndRun Technologies. “Meridian II also introduces a security-hardened, high-bandwidth network interface to synchronize evolving, network-centric applications via the Network Time Protocol (NTP) and IEEE-1588 Precision Time Protocol (PTP). Frequency standard customers will be happy to know that the revolutionary ultra-low phase noise and short-term stability performance of the original Meridian continues to be provided.”
Tycho II Precision TimeBase.
Also new is the Tycho II Precision TimeBase time and frequency standard, which references GPS to provide exceptional time (25 nanoseconds to UTC) and frequency (<1×10-13 per day) accuracy in a security-hardened, network-centric platform.
At the core of Tycho II is a new EndRun GPS receiver that is optimized to take advantage of improved GPS system accuracy. Tycho II delivers a variety of traditional and network-based time and frequency signals and services via a modular, customer-configurable platform. Operational status is easily monitored via the network interface (HTTPS, SNMP, SSH). Intuitive charts are provided to assess current and historical performance of Tycho II, its GPS receiver and reference oscillator.
“The second-generation Tycho II provides our customers with a cost-effective, high-performance time and frequency standard without compromise to security and reliability,” said Dan Paine, sales and support manager, EndRun Technologies. “In addition, Tycho II uses the same network-centric core of our ultra-high performance Meridian II TimeBase. This enables operation as a high-bandwidth, Network Time Protocol (NTP) server and optional IEEE-1588 Precision Time Protocol (PTP) Grandmaster.”
Both the Meridian II and Tycho II have modular architecture that allows customers to configure them to meet specific application requirements.
The units support mission-critical operations in a wide range of government and commercial applications including telecommunications, satellite communications, digital video broadcast, simulcast radio, test range, test and measurement, calibration labs and power utilities.