[SPONSORED CONTENT] Frontier Precision Unmanned is revolutionizing geospatial surveying by integrating advanced drone technology into various industries such as mining, construction, and agriculture. Their innovative unmanned aerial systems (UAS) enable professionals to conduct high-precision aerial surveys efficiently and safely. By offering industry-leading products and software from manufacturers like DJI Enterprise, Quantum-Systems, and YellowScan, Frontier Precision Unmanned ensures that clients receive tailored solutions for their specific applications. These applications encompass geospatial surveying, mapping, infrastructure inspection, and environmental monitoring.
In their promotional video, Frontier Precision Unmanned showcases the transformative impact of drone technology on traditional surveying methods. The video highlights how drones facilitate rapid data collection, producing deliverables such as point clouds, digital surface models, and orthomosaic imagery. These advancements not only enhance accuracy but also significantly reduce the time and costs associated with conventional surveying techniques. Frontier Precision Unmanned’s commitment to providing cutting-edge UAS solutions empowers surveyors and GIS professionals to embrace modern technology, ensuring projects are completed with greater precision and efficiency.
■ The term precision agriculture emerged when yield monitoring was first invented and brought to market.
■ GPS receivers were added to map the sources of the yields, which began to make it possible to manage farmland and zones based on productivity.
■ This very quickly evolved into also mapping soil sampling results and directly tying that type of information to point-specific yield information from a field.
■ After several years, variable rate application of fertilizer emerged.
■ In the mid-2000s, auto-swath technology came on the market, making it possible to turn on and off the different implement sections on application equipment — primarily, sprayers and spreaders.
■ In the mid-2000s, autosteering systems started to become standard on newer equipment and soon became a key product in the aftermarket. This gave farmers better efficiency and helped provide them more hours of productivity per day. It also allowed them to pay better attention to the equipment and the application that they were set up to do.
■ The combination of swath control and auto guidance greatly accelerated the development of precision agriculture, eventually leading to the monitoring and control of planter equipment.
■ More recently, the trend toward autonomy began, with greater focus on live sensors, including camera imagery.
In case you missed it, the European Union Agency for the Space Program (EUSPA) recently issued its first everUser Technology Report addressing both GNSS and Secure SATCOM. Though they seem to be different and distinct topics, EUSPA does a reasonable job of drawing them together with an “Editor’s Special — Synergies from Space” at the end of the document.
The first half of the report deals with GNSS and is an exploration and celebration of how far we have come with GNSS. While the report is aimed at “users” and is designed to be “technical,” it is written to be accessible by most who are generally familiar with the topic.
Also, a careful reading reveals several messages for policymakers.
Protecting Frequencies
The report opens with a celebration of what has now become a multi-constellation, multi-frequency, open positioning, navigation and timing (PNT) system with 110 satellites, two regional augmentation systems (Japan’s QZSS and India’s NavIC), and Satellite Based Augmentation Systems (SBAS). All of this depends, of course, on clear and uninterrupted signals.
One of the first cautions policy makers should note is a subheading in the section that reads “Frequencies: a scarce resource to be protected.” This is the first of many mentions of the need to protect signals and users from accidental and malicious interference.
From 2016 to 2019, the European Union’s STRIKE3 project deployed equipment to monitor L1/E1 signals in 23 countries across the globe. They found more than 450,000 signals that could interfere with GNSS, 59,000 of which were assessed to be intentional jamming or spoofing.
This was well before the current wars in Ukraine and the Middle East and before Russia’s malicious ongoing electronic warfare in the Baltic. So, even in the absence of aggressive nation-state actions, which could flare up at any time, STRIKE3 showed that GNSS interference was a significant problem threatening users’ reliance on GNSS.
Both the European Union and the United States have undertaken projects in response to widespread jamming and spoofing.
In Europe, EUSPA has begun the EGIPRON project, or European Global Interference PROtection Network. It aims to develop and deploy “…an interference monitoring system covering all European territories and worldwide areas of European interest” working with contractors Qascom and Leonardo.
The U.S. Department of Transportation (DOT) announced the “GNSS Situational Awareness Common Operational Picture GovCloud Environment” at the December 2024 National PNT Advisory Board meeting. The government version was described as operational, with a public version to be available in mid-2025.
These detection — and hopefully geolocation — systems will be great tools. Policy makers must remember, though, that better understanding the scope of the problem will not solve it.
Better laws and regulations to empower enforcement, along with improved enforcement capability, will both be needed if even a dent is to be made in the problem. Getting these in place will be significant legislative and budgetary challenges. Even then, the problem of accidental and malicious GNSS interference will not be solved. Authorities will just be able to manage it a bit better.
Toughen Receivers
A great majority of the GNSS portion of the document is appropriately devoted to receivers. They are, after all, the only part of the GNSS system over which users have any discretion and control.
Receiver design, signal processing, antennas and PNT processing are all discussed. The most attention is paid to describing the characteristics and appropriate uses of five different families of GNSS receivers:
Mass Market Entry-Level
Mass Market Premium
Professional Non-Regulated
Professional Regulated
Special Applications
Using the right kind of GNSS receiver for a given application is essential for safety and effectiveness.
The question for policymakers, though, is not whether the right technology exists to mitigate risks — it does. Rather, the issue is whether that technology is being used appropriately.
Most GNSS users are uninformed about GNSS issues and tend to purchase equipment based upon price rather than resilience. Policymakers must consider how to motivate users, especially in critical applications, to purchase and use more expensive equipment. Government leaders have many levers of influence at their disposal, from education to regulation and requirements. As of yet, however, we have seen few in use.
Alternative & Complementary PNT
The booklet devotes a page to “Complementary PNT Technologies” with the subhead “Complementary PNT technologies are redefining navigation solutions.” Saying “one size does not fit all” — which can also be said for GNSS — includes a graphic from the most recent European Radionavigation Plan of a conceptual, system of systems PNT architecture.
Perhaps more significantly, other pages have mentions of the desirability of “diversifying” PNT sources and “hybridizing” PNT sources.
Safety-Critical Applications
Overall, the GNSS section of the User Technical Report is an excellent general overview and reference document.
Its description of SBAS, however, might give a misimpression to the uninformed reader.
The title on page 12 reads “SBAS enhance GNSS performance and enable safety critical operations.”
SBAS improves GNSS accuracy with corrections and ionospheric models and helps with integrity. However, it does little to prevent service disruptions due to interference.
The title for SBAS conflict on page 12, with a comment on page 17, discusses “GNSS Vulnerabilities and Mitigation Measures.” The very last note on the page and in the tiniest type reads, “For critical applications, implement alternative (non-GNSS) technologies as a backup to ensure continuous PNT information.”
This latter statement is very much in keeping with the most current, 2023 version of the European Radionavigation Plan, which says:
“Thus, for critical applications or critical infrastructure protection, it is broadly accepted that GNSS, even in a multi-constellation and multi-frequency environment, should not be the unique source of PNT information. For those applications, an alternative PNT solution (back-up but also complementary) should be developed and maintained, not necessarily based on radio frequency technologies.”
To a certain extent, this has been echoed in the United States as well.
In 2020, a Presidential Executive Order warned against over-reliance on GPS/GNSS, saying the government “must ensure critical infrastructure can withstand disruption or manipulation of PNT services.”
Following this, in its January 2021 report on a PNT demonstration project, the DOT said:
“Promoting critical infrastructure owner/operator use of those technologies that show strong performance, operational diversity, operational readiness, and cost-effectiveness is worthwhile. Based on this demonstration, those technologies are LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber optic time services to transmitters/control segments.”
Additionally, a 2023 presentation to an international group by the Office of the Assistant Secretary of the Air Force was titled “Alt. PNT — the Pathway to Resilience.”
GNSS are great systems, but we cannot let our understandable enthusiasm for what are truly miracles of technology unintentionally mislead others. Policymakers must be constantly on the lookout for such missteps and help us all maintain a broader, user-focused perspective.
[SPONSORED CONTENT] Ensure accurate navigation by avoiding errors in simulated GNSS and INS output. Discover how CAST Navigation’s advanced configurability and synchronization deliver reliable, high-fidelity simulations for precise performance in diverse scenarios.
Galileo is Europe’s civil global navigation satellite constellation and a major success of the European Union (EU). It provides the world’s most precise satellite navigation performance. Galileo services began in December 2016 and are currently supplied to more than 3 billion users. They offer several high-performance services worldwide, featuring various levels of accuracy, robustness, authentication and security.
Galileo is a key component of mass-market applications for such areas as transport, agriculture and timing but also for security-critical applications, such as health services, emergency and rescue services and law enforcement. Galileo services continue to expand with many new capabilities that are unique with respect to other GNSS.
The European Union Agency for the Space Programme (EUSPA) and the European Space Agency (ESA) continue to collaborate effectively on the many developments, deployments and evolution activities of the Galileo Programme, each according to their respective responsibilities for exploitation and system development, with the European Commission acting as the program manager.
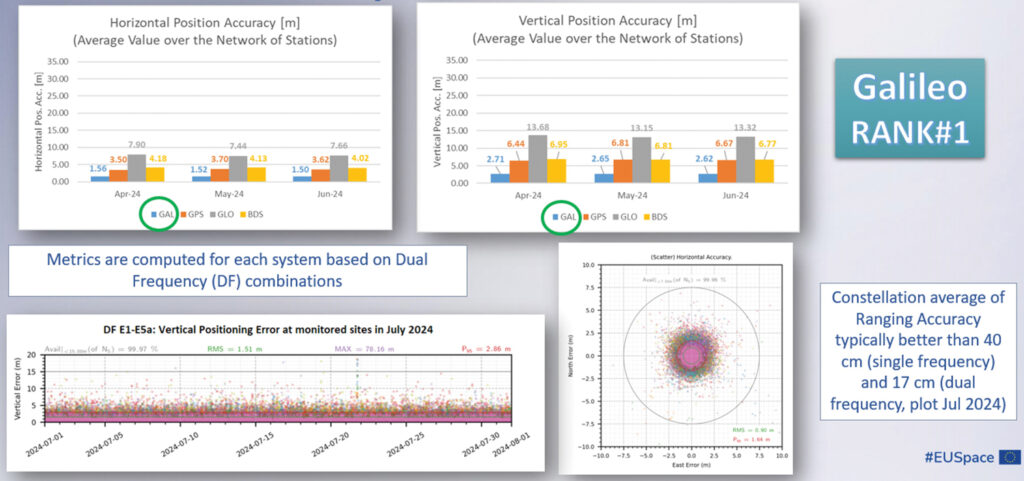
Stable Service Performance
Galileo services continue to deliver excellent performance every month in a safe, secured and seamless manner, managed by EUSPA. The performance parameters of the Galileo services are independently monitored by the Galileo Reference Centre (GRC) and are regularly published on the web portal of the GNSS Service Centre (GSC): gsc-europa.eu.
The performance of the Open Service (OS) remains “Best in Class” among the GNSS providers. Timing users also continue to receive accurate (in the order of 5 ns) access to Galileo System Time, which they can trace to Universal Coordinated Time (UTC) through the corresponding offset parameters transmitted by the satellites.
The Search and Rescue (SAR) service was delivered well beyond the commitment to the users, for both forward and return link services, while the High Accuracy Service (HAS) and the Public Regulated Service (PRS) continue being provided as planned in the corresponding Service Definition Document (SDD).
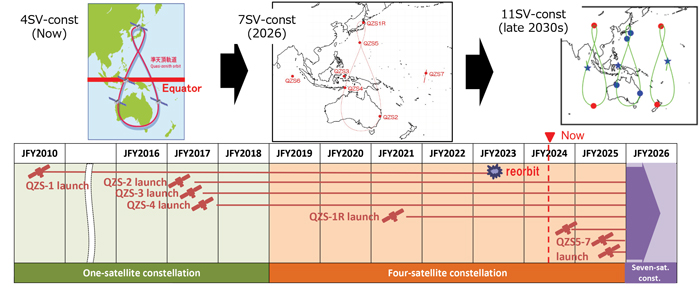
Japan’s Cabinet Office (CAO) is currently developing the Quasi-Zenith Satellite System (QZSS) seven-satellite constellation (7SV-const.)
Japan’s cabinet revised our new basic space policy plan on June 13, 2023. It states that the number of QZSS satellites should be increased from seven to 11 to improve stability and reliability as one of the social infrastructures by securing backup function for coming full-scale use and to reduce the dilution of precision (DOP).
On June 12, 2024, the National Space Policy Secretariat revised the action plan for the satellite positioning system for the first time in three years. According to this plan, the completion of the QZSS 11-satellite vehicle constellation is anticipated by the late 2030s.
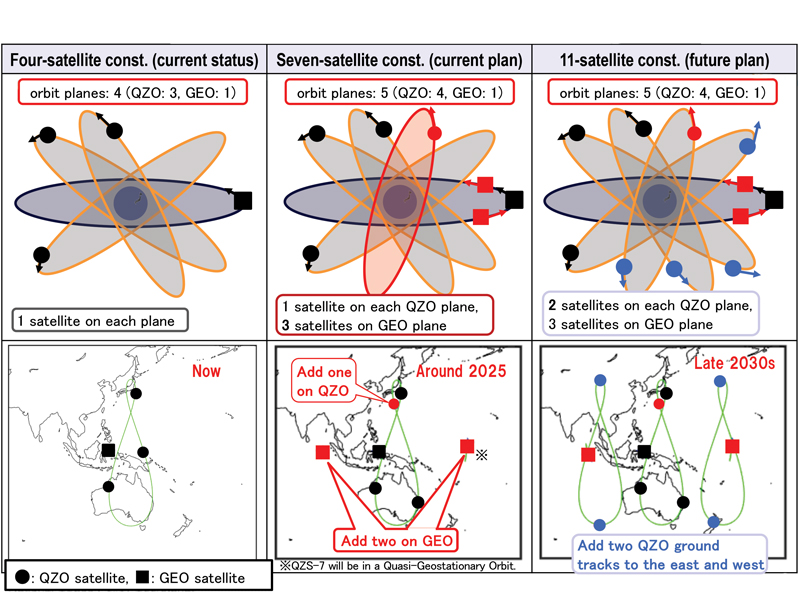
Figure 1 System expansion of QZSS.
Brief History of QZSS
Since 2006, the Ministry of Education, Culture, Sports, Science and Technology (MEXT), the Japan Aerospace Exploration Agency (JAXA), the Ministry of Internal Affairs and Communications (MIC), the Ministry of Economy, Trade and Industry (METI) and the Ministry of Land, Infrastructure, Transport and Tourism (MLIT) have collaborated to develop the world’s first centimeter-level positioning satellite.
The first QZS satellite was launched in September 2010, for what was then envisioned as a four-satellite regional satellite navigation system, also known as MICHIBIKI. In September 2011, the Cabinet approved a plan to build the four-satellite constellation (4SV-const.) in the late 2010s, with the goal of building a 7SV-const. in the future. The budget was approved in JFY2012 to promote this as a national project.
In 2017, QZS-2, 3 and 4 were successfully launched and a 4SV-const. was established. On Nov. 1, 2018, QZSS officially began service. On Oct. 26, 2021, the successor to the first MICHIBIKI was launched.
Development is underway to launch three additional satellites for the 7SV-const. sequentially from JFY2023 to JFY2024, depending on the development status of the H3 launch vehicle.
To improve resilience for more stable positioning and improved DOP, CAO has started a study to transition from a 7SV-const. to an 11SV-const. (See Figures 1 and 2)
Figure 2 QZSS Constellation Expansion Plan.
Service Overview
The 4SV-const. provides GPS Complementary Service (PNT service); GNSS Augmentation Service, i.e. Sub-meter Level Augmentation Service (SLAS), Centimeter Level Augmentation Service (CLAS), MADOCA-PPP and satellite-based augmentation service (SBAS), as well as a messaging service.
The QZSS constellation consists of a geostationary orbit (GEO) satellite, QZS-3 and three QZO satellites.
QZSS’s performance of the positioning, navigation and timing (PNT) service and signal-in-space user range error (SIS-URE) was much better than specified. Evaluation results are shown in Table 1.
The evaluation period was “08/01/2023#07/31/2024.” The specification is less than 2.6 m (95%).
Toward Seven-Satellite Constellation
Three additional satellites will be positioned in an inclined geostationary synchronous orbit (IGSO) at 90.5° east longitude and in a quasi-geostationary orbit at 175° west Longitude. This constellation is designed to ensure that multiple satellites are visible at high elevation angles, with the goal of having more than four satellites visible for extended periods of time, ultimately improving the DOP.
The positioning signals of 7SV-const. are shown in Table 2. QZS 5 to 7 transmit L1C/B.
Table 1 Performance of the QZSS PNT service.
After the QZS-5 service starts, QZS1R’s signal will switch from L1C/A to L1C/B. The QZSS Navigation Message Authentication (QZNMA) service for other GNSS is included in L6E signals.
QZS5-7 development is ongoing. A system-level test is in progress. The plan is to launch QZS 5-7 around 2025. QZS-5 and 6 have almost finished the system-level test. QZS-7 finished the electrical test, and now it is in the environmental test phase.
QZSS antenna patterns for SSV users, published since Aug 2023, correspond to the ICG WG-B recommendation “Release of GNSS Transmit Antenna Patterns Including Side Lobes,” submitted on Dec. 11, 2019.
The QZSS ground system, capable of operating with seven satellites, was completed in August 2023. The only remaining task is to conduct compatibility tests between the satellites and the ground radio frequency. The QZSS ground system consists of two master control stations located in Hitachi-Ota and Kobe, as well as 10 satellite tracking and control stations (telemetry, tracking and command stations), primarily situated in the southwestern islands. Additionally, there are more than 30 monitoring stations worldwide, established in cooperation with various countries.
The following additional services began this year or will begin next year:
Users obtain position, velocity, and time (PVT) solutions using ranging signals provided by the 7-SV const. The Navigation Message Authentication (NMA) began in April 2024.
Multi-GNSS Advanced Orbit and Clock Augmentation — Precise Point Positioning (MADOCA-PPP) covers a major part of the Eastern Hemisphere and provides PPP error corrections on the L6 signal. It enables highly precise positioning by providing augmentation data to correct some GNSS errors and provides two service levels, i.e., (a) global-PPP and (b) fast-PPP with ionospheric correction.
Operational service started on April 1, 2024 and Internet distribution of MADOCA-PPP in July 2024.
Expanded Satellite Report for Disaster and Crisis Management (DC report), Early/Emergency Warning Satellite Service (EWSS).
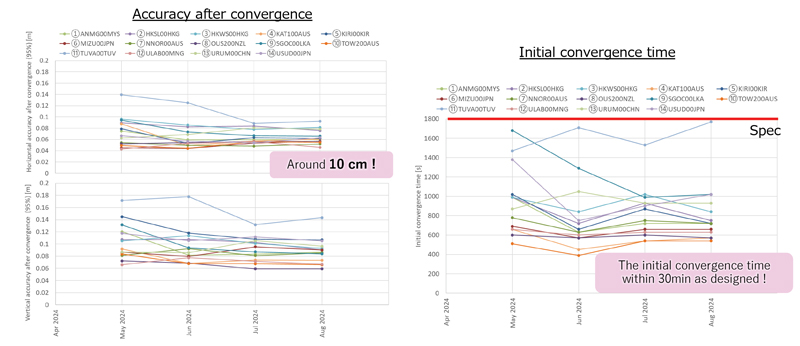
Figure 3 MADOCA-PPP service evaluation results.
In addition to the current DC report service generated by the Japan Meteorological Agency, other disaster-related reports, called L-alert and J-alert, such as an evacuation order, began on April 1, 2024.
The Global PPP service provides highly precise positioning where QZSS L6E signals can be received.
It provides satellite-dependent error corrections (orbit, clock, code/phase bias) by QZSS L6E signals.
Faster PPP using observation data from regional/nationwide Continuously Operating Reference Stations (CORS). In addition to global PPP, QZSS L6D (QZS-6 and 7) signals will provide regional error corrections (ionospheric correction).
MADOCA-PPP began operational service on April 1, 2024. For MADOCA’s stable operation, the GNSS Integrated Data Sharing System (MIRAI) was released in April 2022. The ionospheric correction data will be broadcast to reduce the initial convergence time starting in 2025.
MADOCA-PPP service was defined and described on PS-QZSS 003, published on March 17, 2022. Internet distribution of MADOCA-PPP, including ionospheric correction data, began in July 2024 to promote MADOCA-PPP utilization. MADOCALIB, test library of MADOCA-PPP, has been open-sourced and made available on GitHub this April, and updated to process ionospheric correction data in July 2024. MADOCA-PPP performance results from May to August 2024 using IGS monitoring station are shown in Figure 3.
Better initial convergence time than the defined specification and approximately 10 cm of accuracy are confirmed.
Thanks to the cooperating countries, ionospheric correction data can be generated, and the initial convergence time reduction was confirmed in all areas.
CAO started the Internet distribution, including the ionospheric correction data for these areas.
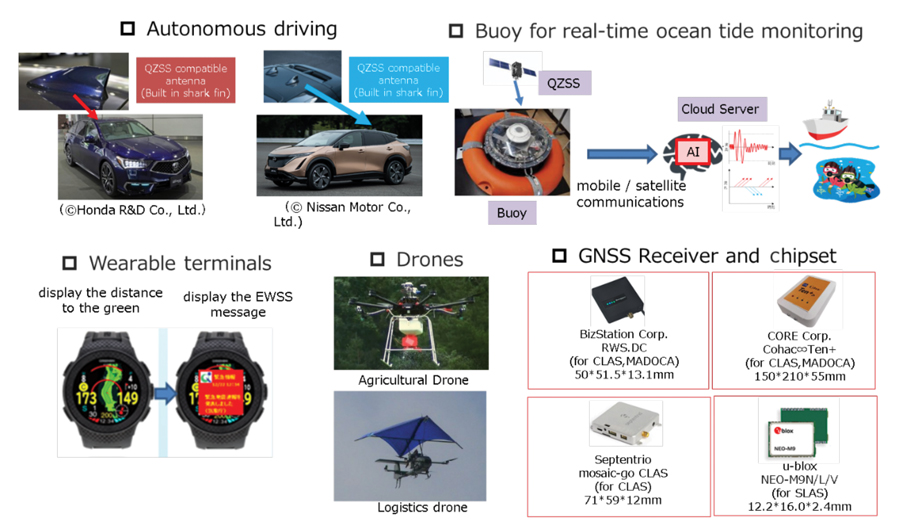
Figure 4 QZSS applications.
QZNMA
QZNMA began on April 1, 2024, to enhance the constellation’s resilience against spoofing attacks.
Navigation messages in the following signals are authenticated using the Elliptic Curve Digital Signature Algorithm (ECDSA P256).
■ QZSS signals (L1C/A(C/B), L1C, L5) are directly protected by self-authentication.
■ GNSS signals (GPS: L1C/A, L1C, L5, Galileo:E1b, E5a) are protected by cross-authentication (L6E).
As of September 2024, approximately 434 products are compatible with QZSS (See Figure 4). New applications such as autonomous driving, drone operations and buoys for real-time ocean tide monitoring are emerging. We expect that many applications and devices using QZSS will emerge. We appreciate your cooperation and support of QZSS.
The automotive navigation of tomorrow is highly connected and capable of dynamically using high-resolution map information and vehicle and environmental data from the cloud. It is an enabler for powerful driver assistance, intelligent e-mobility and autonomous driving. As a global provider of software engineering services for the mobility industry, Intellias is involved in many of these developments.
Although obtaining mapping and navigation data is easier today than it was 10 years ago — thanks to dashcams, UAVs and satellites — collecting this data is still labor-intensive. Even if most corners of the world are already recorded in public and private geographic information systems (GIS), the maps still need to be maintained regularly. Data accuracy and timeliness are the two biggest challenges in the mobility industry, followed by coverage, as the physical world is constantly evolving. To meet these requirements, the evolution of navigation and digital mapping is gathering pace. The following six technology and deployment trends will drive automotive mapping and navigation in the coming years.
1. Enriching Mapping Data With AI
Satellite imagery was a breakthrough for map creation. The wrinkle, however, is that most mapping software cannot work directly with satellite photos. Visual data first needs to be codified into comprehensive navigation datasets in a suitable format such as the Navigation Data Standard (NDS). Then map owners must keep it up to date. Both processes are costly and labor-intensive, making them great use cases for artificial intelligence (AI) in mapping.
AI algorithms improve the speed and precision of digital map building by offering the ability to update maps more regularly and map new areas faster. They can classify objects in satellite images — buildings, roads, vegetation — to create enriched 2D digital maps as well as multi-layer 3D map models. With precise maps, you can delight users with better ETAs, detailed fuel or energy usage estimates, and richer point-of-interest information.
Apart from facilitating the collection of mapping data, AI can also help with generating such data. Researchers from MIT and the Qatar Computing Research Institute (QCRI) recently released RoadTagger. This neural network can automatically predict the road type (residential or highway) and number of lanes even with visual obstructions present, such as a tree or building. The model was tested on occluded roads from digital maps of 20 U.S. cities. It correctly predicted the number of lanes with 77% accuracy and predicted road types with 93% accuracy.
That said, sensor data collection from connected vehicles isn’t going anywhere. OEMs are increasingly relying on their fleets to collect new insights for digital map creation, and this process is becoming easier with advances in machine learning. HERE Technologies recently presented UniMap — a new AI-driven technology for faster sensor data processing and map creation. The new solution can effectively extract map features in 2D and 3D formats, then combine them with earlier map versions. This unified map content data model allows new digital maps to be available in 24 hours.
Photo: Intellias
2. NDS.Live: From offline databases to distributed map data systems
Conventional onboard navigation systems are designed, developed and integrated with proprietary databases, which become obsolete with every new product generation. NDS.Live is the new global standard for map data in the automotive ecosystem, promoting the transition from offline to hybrid/online navigation. It minimizes the complexities of supporting different data models, storage formats, interfaces and protocols with one flexible specification. NDS.Live is not a database, but a distributed map data system.
NDS.Live was co-developed by global OEMs and tech leaders, including Intellias, Daimler, HERE, Denso, Renault and TomTom are among those who have already adopted it. For example, second-generation Mercedes-Benz User Experience (MBUX) systems are powered by NDS.Live. The distributed map data system provides fresh information for the driver assistance system, which gets visualized as augmented reality (AR) instructions on the head-up display (HUD). NDS.Live can help massively improve the navigation experience for EVs and regular connected vehicles. It also helps OEMs deploy value-added subscriptions for assisted driving and navigation.
3. 3D and HD map generation
3D maps enable accurate rendering of physical objects in a three-dimensional form. High-definition (HD) maps feature detailed information about road features (lane placements, road boundaries) and terrain type (severity of curves, gradient of the road surface). Both types of maps are essential for launching advanced ADAS features and, ultimately, ushering in the era of autonomous driving.
3D maps define how the vehicle moves and help it interpret the data it receives from onboard sensors. Since most sensors have a limited range, HD maps assist by providing the navigation system with extra information on road features, terrain and other traffic-relevant objects.
The bottleneck of both HD and 3D mapping is collecting and rendering data. In the case of 3D maps, you need to capture video in real time from multiple cameras, plan for interference due to vibration, temperature and hardware issues, and then repeat the process across billions of kilometers of roads across the globe. Rather than doing this huge task alone, mobility players and OEMs join forces:
• HERE and Mobileye, for example, partnered to crowdsource HD mapping data collection, with VW joining later. Mobileye developed a compact, high-performance computer vision system-on-chip called EyeQ. Installed by more than 50 OEMs across 300 vehicle models, the system supplies Mobileye with ample visual data they can then render into maps with the help of partners.
• TomTom, in turn, teamed up with Qualcomm Technologies to crowdsource HD mapping insights from its users. Qualcomm provides the underlying cloud-based platform for making and maintaining HD maps from various sources, including swarms of connected vehicles.
Photo: Intellias
4. Autonomous driving simulations
Autonomous vehicles require extensive road and track tests to pass security checks. Manufacturers also need to simulate near-crash events without putting anyone in danger. Hyper-realistic virtual worlds can be much safer testbeds for autonomous vehicles (AVs) — especially as virtualization technology improves.
A group of researchers released an open-source, data-driven simulation engine for building photorealistic environments for AV training. The engine can simulate complex sensor types including 2D RGB cameras and 3D lidar, as well as generate dynamic scenarios with several vehicles present. With the new engine, users can simulate complex driving tasks such as overtaking and following.
Waymo takes a similar approach of using real-world data collected from vehicle cameras and sensors to create highly detailed virtual testbeds. The Waymo team has built virtual replicas of several intersections complete with identical dimensions, lanes, curbs and traffic lights. During simulations, Waymo algorithms can be trained to perform the most challenging interactions thousands of times, using the same or different driving conditions and different vehicles from its fleet.
To perfect the performance of the algorithm, the team uses a fuzzing technique. During training sessions, engineers alternate the speed of other vehicles, traffic light timing and the presence or absence of zig-zagging joggers and casual cyclists. Once the Waymo algorithm learns the trick of driving through a specific intersection with a flashing yellow arrow, the “skill” becomes part of the knowledge base, shared with every vehicle across the fleet.
The new generation of high-fidelity 3D environments can be built with data from different sensor types to effectively convey all details of the material world to the algorithm. Existing 3D visual databases already include realistic details for traffic signs, pavement markings and road textures. With machine learning and deep learning algorithms, complex ADAS/AD scenarios can simulate close to real-life conditions.
Photo: Intellias
5. Digital twins of road infrastructure
While OEMs leverage dashcam data collection for building better navigation systems, transportation managers use the same intelligence to digitize road infrastructure. A digital twin is an interactive, virtual representation of physical assets or systems such as a smart traffic light network or smart parking facilities. Powered by real-time data, digital twins of road infrastructure can enable advanced urban planning scenarios. This includes dynamic traffic light signal optimization to reduce congestion as well as prioritized public and service transport management and accurate traffic predictions to optimize planning, signage, construction work schedules, etc.
Low latency is crucial for autonomous driving. Yet 3D map generation on the edge requires substantial computing power. Moreover, vehicles cannot store all mapping data on their route and need to constantly receive over-the-air updates. A group of researchers has proposed placing compact map distribution devices on roadside edges to facilitate point cloud data (PCD) map delivery on the go. The results show that autonomous vehicles can perform self-localization while downloading PCD maps. This system allows autonomous vehicles to receive dynamic new maps for each new destination instead of storing tremendous data records onboard.
6. AR in HUD navigation products
The latest vehicles have an upgraded human-machine interface (HMI)design, featuring new hardware and software elements that allow for AR navigation. AR in HUDs can deliver all standard information from static displays (driving speed, status of the ADAS system, fuel or charge levels), alongside dynamic routing instructions, including information on traffic signs, speed limits, construction work alerts and ETAs.
Overall, AR navigation systems can help drivers make better decisions on the road. A recent comparative study found that drivers using AR-augmented HUDs made fewer errors and drove faster on average than those using conventional HUDs. Participants also rated AR HUD instructions as more useful and easier to understand.
The next advance in navigation will be holographic displays, offering AR instructions in 3D. Advances in lidar technologies already allow for projecting ultra-HD holographic representations of road objects in real time into the driver’s field of view. Such systems can enable shorter obstacle visualization times and reduce driving-related stress, according to Tech Explore.
[SPONSORED CONTENT] LabSat has announced the launch of the LabSat 4 GNSS Simulator, a cutting-edge solution for modern GNSS signal testing. With three configurable RF channels, up to 12-bit I&Q quantization, and variable 10-60 MHz bandwidth, it offers exceptional customization and precision. Synchronized record and replay of external data sources such as CAN FD and RS232 further enhance complex test scenarios.
LabSat 4 has been engineered to deliver ease of use, with saveable custom record settings and a web-based interface for effortless configuration. Its impressive file management capabilities, featuring 7.6TB internal storage and fast data transfer via Gigabit Ethernet and USB 3.0, meet high-volume data demands efficiently. Maintaining the compact size, portability, and cost efficiency of its predecessors, LabSat 4 is ideal for use both in the field and laboratory. Additionally, it integrates seamlessly with SatGen Simulation Software, enabling the creation of detailed GNSS RF I&Q scenario files based on custom trajectories, enhancing its utility for sophisticated GNSS signal testing.
[SPONSORED CONTENT] VBOX NTRIP Modem allows you to receive RTK correction data via internet, without having to operate your own base station. By accessing public or commercial RTK networks, correction messages from a grid of permanent base stations can be received by either Wi-Fi or 4G cellular connection. Utilizing Network RTK overcomes the range restrictions of a single base station, allowing for centimeter-level RTK accuracy to be achieved over significant distances. Additionally, receiving corrections via internet rather than radio provides a more reliable signal reception as interference from changes in elevation or topographical obstacles are minimized.
If your use of RTK corrections is localized, then you can still gain the benefits of increased range and signal reliability offered by utilizing internet-based correction messages. Simply connect your base station to a computer with internet access and cast the correction messages from your base station directly to the VBOX NTRIP Modem.