“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Songs for the Cows
Photo: SWNS Media Group
Farmers are controlling cows with a GNSS-based tracking system that plays “Waltzing Matilda” when they get too close to a virtual fence. Blue Carbon Farming in Somerset, England, has begun working with the Wildlife and Wetlands Trust (WWT) to allow cattle to graze in wetlands and salt marshes for the first time in 30 years. Farmers can now use the Nofence app and collars to track where the cows are and warn them away from danger with music. If a cow gets near the virtual fence, a boundary determined by the farmers, its collar will play the tune to warn it away from the area.
Robotic Dogs on a Mission
Photo: BMW
BMW is using a four-legged robotic dog to gather data for a digital twin at its Hams Hall engine production plant in the United Kingdom. The robot – a Boston Dynamics Spot model, which BMW has renamed Spotto – also will act as a watchdog and assist in other tasks at the site’s facilities. The autonomous robot is equipped with visual, thermal and acoustic sensors. The Hams Hall digital twin operates on three levels. On the first level, the twin generates 3D representations of the plant. The mobile robot feeds data into the second level – a data layer that also receives information from the site’s production facilities and IT systems. On the third level – the application level – programs sort the collected data, which personnel use for quality assurance and production planning purposes.
Keep Your Hands on the Wheel
Photo: Tesla
The U.S. Department of Justice has launched an investigation into Tesla’s Autopilot and Full Self-Driving (FSD) systems. Tesla is under the microscope of U.S. federal prosecutors, as well as the U.S. National Highway Traffic Safety Administration (NHTSA), who want Tesla to share more information related to its autopilot system after crashes continued occurring despite a December recall of more than 2 million vehicles. The investigation focuses on Tesla’s Autopilot system and the more advanced Full Self-Driving package, which the company has been selling as an optional add-on. Neither system can fully automate the driving process without human supervision, a point of contention that has raised questions about the accuracy of Tesla’s promotional materials.
Mass Coral Bleaching
Photo: Rainer von Brandis / iStock / Getty Images Plus / Getty Images
The Australian Institute of Marine Science (AIMS), in collaboration with the Great Barrier Reef Marine Park Authority, has observed extensive coral bleaching caused by elevated sea temperatures during aerial and in-water surveys of the reef. This information confirms that a mass coral bleaching event is taking place on the Great Barrier Reef, which is the fifth such event since 2016. The aerial surveys have so far covered almost two-thirds of the Great Barrier Reef Marine Park.
GMV has been selected by BMW Group to supply its safe and precise positioning technology, GMV GSharp, for the next generation of BMW Group’s autonomous vehicles.
GSharp is equipped with an onboard positioning engine (PE) software and a GNSS corrections service, allowing vehicles to collect augmentation data and safety-related information for computing an accurate and reliable user position.
Both the correction service and positioning engine are developed following the ISO 26262 and ISO 21448 standards to ensure compliance with safety requirements. The solution also complies with the concept of security-from-design as per ISO 21434, including the necessary counter-measures in the SW and system and in the GNSS related attack detection or anti-spoofing and anti-jamming schemes.
The most demanding automotive project management practices and industry standards for software engineering (A-SPICE CL3) have been applied during its development.
In addition to the software side, GMV’s solution relies on a secure and redundant physical infrastructure. GMV owns and operates a worldwide GNSS station network, which provides the GNSS raw data needed to generate the corrections. These corrections are computed within two physically independent data centers, providing GMV’s solution the required availability levels for automated driving applications.
Innoviz Technologies, a lidar technology company, and the BMW Group, a manufacturer of vehicles and motorcycles, have collaborated on a B-sample development phase for a new-generation of lidar. Under the development agreement, Innoviz will develop the B-samples based on its second-generation InnovizTwo lidar sensor to enable Level 3 automated driving capabilities.
“Lidar is one of the critical technologies underpinning Level 3 or even higher automated functions,” Nicolai Martin, BMW Group’s SVP of driving experience, said. “Optimizing lidar technologies and costs are the major challenges in order to bring Level 3 highly automated driving into the mainstream.”
The companies already have been working together for a few years on an existing program that includes the first deployment of lidar-enabled highly automated technology on the BMW 7 Series, which will launch later this year.
In addition to the lidar solution for the BMW 7 Series, the BMW Group and Innoviz have started the first phase of development for a lidar-based minimal risk maneuver system (MRM). The MRM acts as a secondary safety driving decision platform that will leverage the InnovizTwo lidar sensor to manage real-time driving decisions.
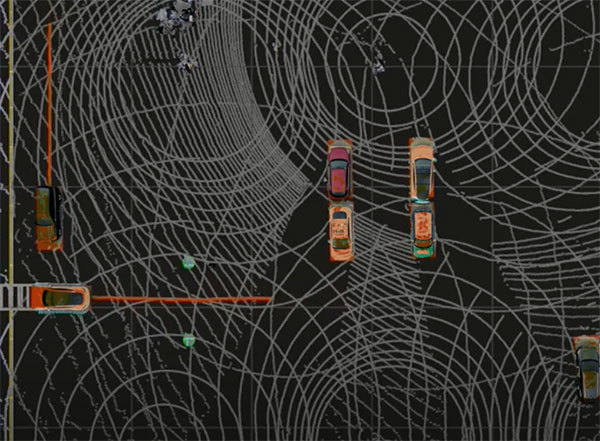
Seoul Robotics has introduced the Level 5 Control Tower (LV5 CTRL TWR), a mesh network of sensors and computers on infrastructure that guides vehicles autonomously without requiring that sensors be placed on individual vehicles.
The technology is in the early stage of commercial deployment to automate last-mile fleet logistics at BMW’s manufacturing facility in Munich. The system has the potential to transform operations for a wide range of business applications, from vehicle distribution centers to car rental companies and trucking logistics.
Seoul Robotics is a 3D perception solution company using deep learning artificial intelligence (AI) to power the future of mobility,
By placing sensors equipped with 3D perception software around vehicles — traffic lights, buildings and highway overhangs — the system can fully capture the environment and communicate with other sensors and the 4/5G systems that come standard on vehicles.
The LV5 CTRL TWR collects all the 3D data, and then automates vehicles accordingly using V2X communications.
“Level 5 mobility has been proven to be more challenging to achieve than expected, until now,” said HanBin Lee, CEO of Seoul Robotics. “LV5 CTRL TWR has massive potential to fuel autonomous mobility, and we are thrilled to continue expanding upon the implementation of this technology with BMW and other partners.”
“Ultimately, these systems will be deployed in additional public and commercial settings, powering aspects of our everyday lives, such as autonomously navigated parking and public transit,” Lee said. “With LV5 CTRL TWR, this future is closer and more accessible than ever.”
The collaboration with BMW leverages hundreds of connected lidar and 3D sensors on infrastructure to automate newly manufactured vehicles within factories and vehicle distribution centers without any human involvement. By making this process autonomous, automakers like BMW can increase operational efficiencies and safety within automotive logistics.
GMV has been awarded a contract for development of a precise GNSS positioning system with integrity for the new generation of autonomous vehicles of the German carmaker BMW Group.
The Spanish multi-national’s technology solution is going to be developed for the first time in BMW Group’s autonomous vehicles. GMV’s positioning software calculates the vehicle’s position and other magnitudes, using advanced GMV-developed algorithms, including components that have already been patented. These algorithms have been especially modified and adapted to meet BMW Group’s performance and safety requirements.
Photo: BMW Group
The developed software will abide by the most demanding automotive standards and the highest quality levels of safety-critical software, GMV said.
Another key component provided by GMV is a GNSS correction service to be run in a secure infrastructure using data from a global network of monitoring stations to be set up by GMV under this contract.
This new project cements GMV’s position as a supplier of GNSS-based autonomous-car positioning solutions, the company said.
“GMV has been investing for many years in the key GNSS technologies that are essential for autonomous driving systems,” said Miguel Ángel Martínez Olagüe, GMV’s general manager of Intelligent Transportation Systems. “For our company this contract represents a unique opportunity to capitalize on all that effort, providing a product of outstanding performance for the automotive industry.”
Mercedes autonomous car on display at Mobile World Congress 2016. (Photo: Kevin Dennehy)
BARCELONA, Spain — Most attendees at the Mobile World Congress (MWC) wouldn’t mistake the huge mobile phone show to be a gathering of auto manufacturers and their suppliers. However, the show, which broke 100,000 participants this year, has seen a rise in auto companies who are outlining connected and autonomous vehicle strategies.
MWC was held Feb. 27 to March 2 in Barcelona.
At MWC, Ford CEO Mark Fields said the company is tripling its investment in new technologies over the next five years with the ultimate goal of fully autonomous vehicles.
Ford also rolled out the new Kuga SUV, which features the company’s new SYNC 3, which Fields says should be in 43 million vehicles by 2023 (SYNC 3 is upgraded to include improved voice commands and easier to get to applications on a driver’s smartphone).
Fields said Ford, which attended its fourth straight Mobile World Congress, was transitioning from an auto company to one that is a dual auto-mobility entity. In addition, just as with GM’s decision to invest $500 million in Lyft, Ford is getting into the sharing economy with its own car-sharing, ride-sharing and other mobility services.
This new mobility strategy includes GoPark, an app that directs drivers to parking spaces; FordPass, a platform that connects services and partners; and FordGuides, a problem-solving app. According to published reports, another Ford app is MyBoxMan, which allows drivers in Europe to make money delivering boxes.
At least one industry expert believes that car sharing and autonomy is the future for auto companies. “Full autonomy is coming. We will see fleets of driverless public transport vehicles on the roads due to their low overheads,” said Kevin Curran, senior member of IEEE and senior lecturer at the University of Ulster. “Regarding non-autonomy, we will see that cars ownership will change in a number of ways. We will start to see more ride sharing. Uber and other ride sharing models will rise to supersede existing traditional models. That is quite obvious even now, and a proper ride sharing model should also emerge, too.”
Ford displayed the Kuga in its main booth, and also had a booth featuring its Developer Program. One of its development partners, Magellan, showed off its SmartGPS in-vehicle technology.
The Magellan unit delivers local information to the car that is equipped with SmartGPS, including speed trap alerts, weather, traffic and lowest gas prices, said Matt Erstling, Magellan product manager, connected platform.
Magellan’s connected auto strategy was outlined, in part, by its new CEO, Pierre Parent, at CES in January. Parent said that the company will continue to put location capability in connected devices.
Large industry players make MWC auto announcements
At its press conference, Hans Vestberg, Ericsson president and CEO, said 5G will provide the latency needed for autonomous cars. The company is jointly developing a connected car with Geeley Automobile Holdings, the Chinese owners of Volvo. Besides Ericsson, Nokia, SK Telecom and others believe that 5G, which is expected to rollout in 2020, will be critical for mobile Internet applications — and, therefore, for better safety in connected vehicles.
Qualcomm announced its partnership with Audi to integrate the Snapdragon 602A into the automaker’s 2017 vehicles. The company showed off connected car technologies with Formula One Team Mercedes AMG Petronias.
One of the cooler pieces of equipment at MWC was the folding steering wheel developed by Harman and Rinspeed. The companies are also co-developing an autonomous car.
Harman showcased its new folding steering wheel at Mobile World Congress 2016. (Photo: Kevin Dennehy)
Besides rolling out Galaxy S7 phones, Samsung announced its Connect Auto dongle that adds LTE connectivity for older vehicles. The dongle plugs into a diagnostic port to let drivers monitor a vehicle’s performance. It also makes the vehicle a Wi-Fi hotspot. It should be available in the second quarter, with AT&T as the U.S. wireless partner.
Saying the partnership is a giant step toward driverless vehicles, Panasonic and Ficosa announced at MWC that they were developing a Smart Connectivity Module that enables passengers to be securely connected through a vehicle’s own internal connection. The system provides both inside and outside connections and works in V2V and V2X environments.
“A lot of people don’t know that 33 percent of our business is in auto and industrial systems. Consumer is only 14 percent,” said Tony O’Brien, deputy managing director, Panasonic Systems Solutions, Europe.
Inside the Mercedes autonomous vehicle. (Photo: Kevin Dennehy)
In other MWC news:
The Consumer Electronics Show (CES), which automakers and their suppliers are heading to in droves, now has 115 exhibiting companies. While far fewer in numbers, and with so many large wireless and device manufacturers involved, auto execs realize that MWC is an important stop before the Geneva Auto Show.
At MWC, I could actually talk to people, even see folks again at events and sometimes passing by in the huge exhibit halls at the Fira Grand Via. You can’t say that about CES. Unfortunately, MWC is getting huge…more than 100,000 people with the requisite traffic congestion, public transit strikes, expensive housing and airfares.
Join Lyft, BMW Group, HERE and 25 other speakers at Driverless, The Business of Autonomous Vehicles, which is March 22-23 at the Crowne Plaza Hotel, San Francisco Airport. Panels feature new technology, executive insights on the future, investments, legal and cyber security and mapping. For more information, go to www.driverlessmarket.com or [email protected].
After months of negotiation, Nokia will sell its HERE Maps division to a consortium of German automakers — BMW, Daimler and Volkswagen — for $2.71 billion, according to the TU Automotive website.
Under the agreement, HERE Maps would turn into an open platform that all car manufacturers can use for navigation and mapping inside vehicles, giving automakers independence from companies such as Google for maps and navigation at a time when the technology moves toward the connected and self-driving car, which rely on navigation technology.
The three German car makers plan to offer the platform to Fiat Chrysler, Renault, Peugeot, Ford, Toyota and General Motors, allowing them to use the mapping service for free without licensing issues.
Nokia is selling the entire unit of HERE, meaning the car consortium will likely continue hiring developers to work on the platform. Companies like Chinese search giant Baidu and Facebook use HERE Maps to power its own mapping services. It remains to be seen how the new deal will affect those services.
“Only with high-precision maps will automated driving on freeways be possible from 2020,” said Bosch board member Dirk Hoheisel. TomTom says it plans to have new high-precision maps for automated driving for all freeways and freeway-like roads in Germany by the end of 2015.
The value of accurate maps is not lost on the automotive industry as it transitions from connected cars to automated vehicles. Three German automakers are rumored to be making a multibillion-dollar investment in Nokia’s HERE mapping division. If the deal goes through as expected by late July, Nokia, which purchased HERE (then called Navteq) for $8 billion in 2007, will have spurned several deep-pocket suitors.
Although not officially confirmed, Nokia’s HERE digital mapping service is set to be purchased by a German auto consortium of Daimler, BMW and Volkswagen’s Audi unit, according to published sources.
Estimates of the deal place it in the $2.7 billion to more than $3 billion range. The potential sale puts to rest industry concern that Google or another giant non-automotive entity would make the winning bid for a company with increasing importance to connected and autonomous vehicles.
Either way, it’s too early to analyze what exactly are the consequences if the German consortium closes the deal with Nokia, said Thilo Koslowski, Gartner vice president and analyst. “In order to justify the purchase price of the acquisition, it will be in the interest of any acquiring party to keep Nokia HERE’s future role as neutral as possible in order not to alienate other clients,” he said. “I could imagine that contractually the acquiring party might be tied to serving these other clients for a least a certain time. If that doesn’t happen, and the deal would be ‘exclusive,’ then it would certainly boost the appeal of other map data providers and encourage new players to emerge.”
If the deal goes through, the German consortium plans to invite such other automotive companies as Fiat Chrysler, Ford, Renault, Toyota and General Motors, according to the Wall Street Journal.
Another take on the potential agreement could be whether car companies have to weigh the pluses and minuses of to join the consortium — or map competitor TomTom needs to consider whether it has more to gain from remaining independent or creating its own consortium, said Roger Lanctot, strategy analytics associate director, global automotive practice.
Industry old-timers may remember the bitter rivalry between Navteq (formerly Navigation Technologies) and Tele Atlas (formerly Etak). This rivalry has remained, even though the names have changed and the location industry has evolved dramatically since 2007, when both Navteq and Tele Atlas were bought by Nokia and TomTom, respectively, in multibillion-dollar deals.
The bidding war for HERE began in April, when Nokia purchased Alcatel Lucent to transition from the location industry. In addition to the German auto consortium, Uber and Chinese technology provider Baidu, Google and Apple were said to be potential buyers. However, Google’s purchase of HERE would have been disruptive to the auto industry, Lanctot wrote in a LinkedIn column. “Google buying HERE would drive the entire industry into the arms of TomTom while removing the leverage-ability of a map duopoly. Google buying both TomTom and HERE would annihilate billions of dollars in research and development activity by car makers seeking to create a truly driver-oriented browsing experience intended to enhance safety,” he wrote.
Mike Dobson, TeleMapics president, who writes about digital maps at www.telemapics.com, recently said that Uber was playing with fire by bidding on HERE because they were clearly concerned about autonomous vehicles. “Within 10 years, Uber will be producing its own fleet of [autonomous vehicles]. While owning a map company might be beneficial to them, they might be better off licensing map databases,” he said.
Uber, which bought mapping company deCarta and Microsoft’s Bing Maps, ultimately withdrew from the bidding war for Here.
City Built for Autonomous Testing Unveiled in Michigan
A 32-acre simulated city recently opened to test how self-diving cars will perform in the future. The $10 million facility, called Mcity and located on the north campus of the University of Michigan, was created by the school’s Mobility Transformation Center and the Transportation Research Institute.
With all the bells and whistles — a bridge, a tunnel, traffic circle, etc. — the facility will rival anything existing, if it hasn’t already surpassed it, in Silicon Valley or Pittsburgh, which seem to be the centers of gravity for the nascent autonomous vehicle industry.
Mcity, which was a government-industry partnership, plans to “lay the foundations for a commercially viable ecosystem of connected and automated mobility,” said a university press release. [Editor’s note: It is refreshing to see the “commercially viable” thrown in there by an academic institution.]
Another key goal is to implement a connected and automated mobility system on the streets of southeastern Michigan by 2021. The MTC is developing deployments of more than 20,000 cars, trucks and buses across southeastern Michigan, serving as testbeds for evaluating consumer behavior and exploring market opportunities, the university said.
At the same time as the Mcity announcement, also in Ann Arbor, the Automated Vehicle Symposium, which is the largest autonomous vehicle conference, was being held at a local hotel. While the conference had such keynote speakers as Google’s Chris Urmson, and sponsors that included Denso and Uber, it still has the feel of this government/academic/technical conference — not unlike TRB or ITS America.
In fact, like many government meetings, the afternoon “breakout sessions” were closed off to the press. This leads to the question, with so many new, and expensive, autonomous vehicle conferences springing up, why isn’t there a single panel on the future worldwide market opportunity?
In other location news:
IndoorAtlas signed a $3 million deal with South Korea’s SK Planet, a subsidiary of SK Telecom, to target the e-commerce market. IndoorAtlas’ investors include ST Planet and Chinese technology provider Baidu, which made a $10 million investment in the company.
Nokia’s HERE mapping and location services business is developing a new global standard for contactless transport ticketing payments using Near Field Communications-enabled mobile phones. HERE announced the formation of the Open Mobile Ticketing Alliance, or OMTA, to help consumers purchase public transit ticket using a mobile app.
HERE competitor TomTom continues to be a major force in vehicle monitoring and location, recently announcing its telematics division broke 500,000 subscribers. Overall, the company serve 36,000 customers, primarily in the European fleet market.
The race for the automated vehicle is on. This time, it’s not about whether automotive OEMs or tech will own the vehicle. It’s a battle between Baidu, China’s web giant, and Google, and it isn’t clear who will win. Baidu has announced it will launch an unmanned car in the second half of this year. Despite speculation that Baidu will be working with BMW, Baidu hasn’t announced its automotive partner. The Baidu vehicle will provide the flexibility of some conventional controls, such as pedals, coupled with automation, unlike Google’s approach of being completely autonomous, without pedals and steering wheel.
One of the most practical uses of artificial intelligence is in the automated vehicle, as cars need to recognize and sort images they “see,” and make quick safety decisions. In a recent TED talk, Chris Urmson of Google revealed a few of the unusual things that Google cars have had to process while driving. The cars have successfully encountered a woman in an electric wheelchair chasing a duck on the road and a child driving a toy car in the road. I wouldn’t be surprised if there are some even weirder encounters that Google is shielding us from.
Artificial intelligence is critical to the automated vehicle. This year Baidu won a prestigious international artificial intelligence competition at Stanford, but was just stripped of its title and barred from competing in 2016. Apparently, the Baidu team broke the rules on how many tests they could run. In the competition, computers had to recognize and sort images and classify objects into 1,000 different categories. The teams were allowed to run a limited number of tests to train their programs on identifying objects. The Baidu team exceeded the limits by submitting their program using different accounts. In an article in the New York Times, Jitendra Malik, an expert in computer vision, compared the actions of the Baidu team to drug use during a sports competition. “If you run a 9.5-second 100-meter sprint, but you are on steroids, then how can your result be trusted?” Malik said.
Automated vehicles aren’t the only location market Baidu is aggressively pursuing. With technology from IndoorAtlas, Baidu has rolled out indoor location to 270 million active users of its map application. The solution uses mobile device technology to create geomagnetic maps of indoor places to enable indoor search and to power store and product search, as well as way-finding. A physical map of a building is uploaded into an app on a mobile device, like a smartphone. Using the app, a person walks all corridors in a building, thereby adding location positioning and creating a map.
Let’s return to the topic of automated vehicles. Earlier this month, Uber suffered a blow when the California Labor Commissioner’s Office ruled that drivers are employees and not contractors, and therefore need to be so compensated. Taxi and limo services had been hurt by services like Uber, and they pressed for redress from what they felt was unfair competition.
Like Uber, the automated vehicle market will likely hit intense push-back from a number of industries that will be disrupted. These include insurers, taxi and truck drivers, and personal injury and traffic litigation attorneys. These groups may try to build regulatory roadblocks for automated vehicles. And as their businesses may suffer, the automated vehicle industry needs to think now about how to mitigate the damage and create allies. With a completely different political process, Baidu may encounter no such resistance in China — quite an advantage. Perhaps Baidu will be first out of the gate, but may not be the long-term winner. Think Ford Sync.
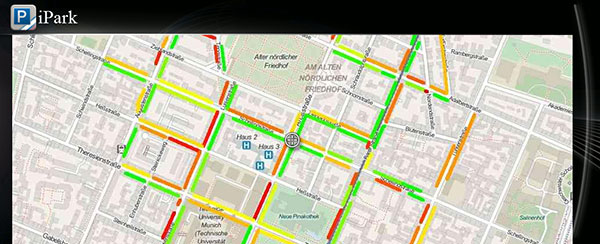
BMW driver interface concept for how INRIX On-Street Parking might be integrated into navigation systems in BMW Connected Drive vehicles. Color coded bars indicate probability of open street parking ranging from green (lots of spaces) to red (not likely to have an open space).
Everyone who has ever been frustrated circling the block in search of parking has wished for a solution that could quickly lead them to that elusive spot. INRIX is launching a new service aimed at addressing this problem by helping drivers quickly find on-street parking. BMW will be the first automaker to include the service for its cars, in its ConnectedDrive autos.
INRIX On-Street Parking answers key questions for drivers including:
Where can I park?With availability updated hourly, quickly identify streets with the best chances of finding a parking spot.
How much will parking cost? Information on pricing, parking/permit restrictions, policy rules (free vs. paid times/days).
Is there a garage or lot nearby? When on-street parking is unavailable, drivers can be directed to one of more than 80,000 off-street parking locations in Europe and North America. The service provides pricing and availability information, ability to compare locations by distance and price as well as locate the nearest entrance.
“As we continue to connect cars to smarter cities, INRIX On-Street Parking fills a critical gap that addresses the growing challenge of traffic and parking in our cities worldwide,” said Bryan Mistele, President and CEO, INRIX. “And looking ahead to a time when autonomous cars are a reality, this service enables vehicles that drive themselves to park themselves now as well.”
Visualization showing INRIX On-Street parking occupancy by block for key neighborhoods in downtown San Francisco. Color coded bars indicate probability of open street parking ranging from green (lots of spaces) to red (not likely to have an open space).
Initially available in Seattle; Vancouver, B.C.; San Francisco; Amsterdam; Cologne and Copenhagen, the service will expand to cover 23 cities by the end of the year.
Experts estimate up to 30 percent of traffic in congested urban areas where street parking is in high demand results from drivers looking for parking. A global survey of commuters in 20 international cities found that nearly 6 out of 10 drivers have abandoned their search for a parking space at least once, and drivers often spend an average of nearly 20 minutes in pursuit of a coveted spot. Further, an analysis by Frost & Sullivan found that drivers waste an average of 55 hours per year searching for parking, costing consumers and local economies nearly $600 million in wasted time and fuel.
Smarter Parking Information
With more than half of the world’s population living in our largest cities, transportation agencies are increasingly turning to intelligent parking solutions to better manage parking inventory and improve urban mobility. INRIX On-Street Parking provides cities with a scalable, cost-effective and immediate way to manage parking inventory as well as improve traffic in urban areas, INRIX said.
On-Street Parking to cities includes:
Real-time Information. Goes beyond one-time snapshots of parking availability, allowing cities to see how parking inventory changes based on time of day, day of week, price and during special events or holidays.
Less reliance on road-side counters and costly sensors. Offers a faster, more cost-effective way for cities to manage parking. The service goes beyond current smart parking technologies because it also works on roads without smart meters or sensors and outside of hours requiring payment.
Better insight for urban planning. With a comprehensive understanding of parking inventory usage citywide, urban planners can gain insights that help them improve parking conditions and locations, and better locate special purpose lanes for bicycles and public transit on city streets.
Calibrate demand pricing models. Provides insight into how pricing fluctuations impact demand in real-time. Cities can optimize pricing to maximize use of available inventory citywide.
Automakers, mobile app providers and public sector agencies interested in learning more can register for a Webinar scheduled for June 17 at 8 a.m. EDT where INRIX will outline use cases, technical specifications and benefits in greater detail.
Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification
By Gilles Boime, Emmanuel Sicsik-Paré and John Fischer
Land-vehicle autonomous navigation requires centimeter-level qualification tools to enable confidence build-up for delivery to open-road traffic insertion. External positioning sensors over a dedicated road section can be replaced with an embedded high-accuracy, highly responsive epoch-by-epoch differential GNSS receiver coupled with an inertial navigation system. The demonstrated absolute accuracy and mobility extends the potential test area and minimizes cost for multi-environment validation.
Cover courtesy of Mercedes.
Personal cars and commercial trucks are continuously improving the driver experience and safety thanks to integration of more significant and machine-assisted control systems. Advanced driver-assistance systems (ADAS) are now integrated in all luxury cars and moving into mainstream products. Technologies covered by ADAS are specific for each car integrator, but increasingly they include now involving more safety features, such as driver assistance and partial delegation to autonomous control for small maneuvers such as lane control. The generation of ADAS systems introduced in early 2015 on high-end models are engaging more intelligence from the control system such as:
Lane departure warning system
Speed assistance and control
Driver assistance and control
Autonomous emergency braking.
It is not only individual drivers who want this technology, but also governments that are getting involved to prevent accidents and minimize the economic impact associated with them. In the European Union, the general safety regulation 2009/661 was the first step to engage member-states to act as a regulator to mandate car safety improvements. The European Transport Safety Council, a non-profit private association, released in March 2015 a position paper titled “Revision of the General Safety Regulation 2009/661.” It promotes the introduction of lifesaving technologies like intelligent speed assistance, autonomous emergency technology including all speed and pedestrian detection, and lane-departure warning systems as the next step of regulation.
Car manufacturers are not far behind. They understand their customers’ expectation of minimized risk and enhanced driving experience. Telematics is also a path to convert a single vehicle into a fully intelligent, connected and entertainment object with an associated high value. So every car manufacturer is willing to be seen as a technology master.
Toyota, for example, plans to integrate collision-prevention technology in all its mainstream and luxury cars by 2017. The ADAS new generation focuses on radar-activated cruise control technology for the collision-prevention system. The control system maintains distance from a vehicle ahead and can stop the car if driver doesn’t react. The next step is to monitor driver attention with sensors like cameras focusing on the driver’s eyes, and the pressure of the hand on the steering wheel.
However, no fully driverless car is expected in the next 10 years. This technology is limited by legal issues and the lack of reliable nationwide mapping data.
Since the technology must be fully proven to prevent any lethal threat on the user and other drivers, most car and truck companies are working actively on qualifying driverless technology today. Nissan began testing driver-assist technology on open-road traffic in Japan in late 2013. It enables highly advanced systems such as lane-keeping, automatic lane change, automatic exit, automatic overtaking of slower or stopped vehicles, automatic deceleration during congestion on freeways, and automatic stopping at red lights. This is a step towards attaining fully automatic driving, targeted for 2020 by Nissan.
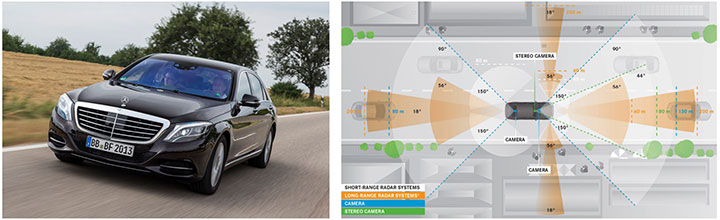
Some European manufacturers such as Daimler Benz are also early adopters. Daimler/Mercedes uses the Bertha Benz prototype car to test autonomous driving technologies. It merged multiple vision, radar and GPS sensor with digital map to monitor an open-road 100-kilometer trip in August 2013 (Figure 1).
Figure 1. Bertha Benz test car, left, running fully autonomous 103-kilometer trip in open road including 27 percent narrow urban roads. Right, networked sensor systems of the S 500 Intelligent Drive research vehicle.
All manufacturers are building driverless capability into their technology demonstration concept cars:
Mercedes with F 015 Luxury presented at the Consumer Electronic Show, early 2015;
Audi with Prologue, an extrapolation of test car RS7 concept equipped with SuperFast driverless pilot;
BMW’s electric i3 car is integrating ActiveAssist technology that enables portions of drive to be without any manual intervention, such as car parking and autonomous rally to a meeting point;
Google’s self-driving vehicle that conforms to California license requirements for driverless tests in open traffic;
Tesla model SD autonomous test car.
Although most market leaders agree that this is not a technology for mainstream production in the next few years, they all work very efficiently to master the technologies. It is a big challenge to integrate all the sensors and the navigation functions to autonomously and accurately position the vehicle on a map. The whole system must be certified to prevent any liability in case of a crash, a case that would engage the solution provider and the vehicle manufacturer.
A large part of the qualification task will benefit from simulations and integration testing platforms in realistic conditions. At the very least, a very robust final open-space validation test must take place. Car manufacturers/integrators are using private test facilities in open air to perform serious trials before proceeding to real traffic conditions. Renault uses a 10-square-kilometer facility in France (Figure 2) to perform private tests in a protected area.
Figure 2. Renault outdoor test center at Aubevoye, France.
New autonomous car drive tests have mandated equipment enabling measurement of the car’s position on the track with an extremely high precision and repeatability. There are two competing technologies to do this:
Install many location sensors on the test track;
Use a general absolute positioning system.
Here we focus on an absolute positioning system that is affordable, easy to install and low maintenance. It is based on two main assertions:
The autonomous pilot can position accurately on the test track;
The test track is accurately referenced to the absolute positioning system.
We focus more closely in this article on the first assertion; the second one can be covered with a specific calibration trial where equipment, as discussed further, can be used in quasi-static mode and experience consistent accuracy. Let us have a deeper look at the candidate position technologies to verify autonomous pilot accuracy.
Positioning Technologies
Many technologies have been proposed to obtain vehicle position on the course. However, they all must be compatible with a reliable mapping database. Given the lack of consistent road infrastructure equipment with alternative capabilities, GNSS positioning is the sole enabling method to fit to a map every place around the world. That is why driverless systems always include a GNSS sensor to help other data matching with the map. The versatility and low cost of GNSS positioning makes it a candidate for open-air validation as well.
Standalone Standard Positioning Service GPS. The SPS single-frequency GPS receivers are included in so many nomadic appliances today that they are a commodity. Since their introduction 20 years ago, their performance is well understood. Some trials were performed in different area profiles with satellite constellation position dilution of precision (PDOP) < 2. Worse results were obtained from deep urban canyons in downtown Seattle, Wash.
For every technology, the relevant performance for the test course is the lateral error to the expected center of the lane in the two horizontal dimensions, referred to as 2D or N/E for orientation north and east.
For standalone SPS GPS, the lateral error standard deviation in 2D can be as high as 46 meters and have peak errors up to 660 meters. Lateral error in 3D can be as high as 20 meters with peak errors up to 175 meters.
Such performances are out of range for any positioning verification. It can only deliver a rough estimate of the point on the map, but would not provide tight correlation with other sensors for the navigation system.
Hybridized IMU and SPS GPS. Coupling of an absolute navigation GPS receiver with an inertial measurement unit (IMU) can mitigate corruption of the navigation solution when intermittent GPS signal outage is encountered. The hybrid approach is beneficial on any difficult signal transmission path from the satellite that is not line-of-sight: in urban canyons, deep foliage, under bridges, tunnels and in any multipath area. It also yields benefits in the very short term (less than a few seconds) for dispersion on the position computed from the sky.
Over the last 10 years, the combined benefits of micro-electro-mechanical sensors (MEMS) and tight coupling algorithms have raised the bar of positioning accuracy. It enables smoothed position along track and dead reckoning (DR) in case of GNSS signal outage.
Lateral error standard deviation in 2D is lowered to 2.3 meters and peak error up to 10 meters. However, this performance is still too poor to validate a vehicle position in the lane.
Hybrid Differential Single Frequency and IMU. The next step to mitigate systematic errors of the GNSS system is to use a set of multiple reference receivers in the vicinity of the area covering the test course. The reference receivers are static. The position of the reference is determined using long-term averages to mitigate constellation errors. A minimum for a position fix of 20 minutes is commonly reported. Then the position error standard deviation in 2D is less than 2 centimeters for baselines shorter than 100 kilometers.
For a MEMS integrated with a standard SPS GPS single-frequency receiver with DGPS correction on a mobile platform moving at less than 70 km/hour with HDOP < 1.4, Table 1 compares performance in a 2013 test.
Hybrid Differential Dual-Frequency Carrier Phase and IMU. The GNSS solution can be further improved, taking into account both L1 and L2 frequencies to mitigate propagation error and carrier phase to achieve ultimate signal accuracy. The combination of both helps solve ambiguities associated with the carrier-phase technique. When combined with a MEMS IMU, accuracy confirmed with HDOP < 1.6 is:
Lateral error standard deviation down to 0.18 meters;
Peak error of 0.6 meter.
However, this is still insufficient accuracy when compared to 0.1 meter required for verification testing.
With such low-cost IMU, GPS outages produce a rapidly increasing lateral error over elapsed time. The lower the speed, the poorer the position result.
Another limitation common to many differential solutions is the turn-on delay for the solution. It is also a repetitive issue in case of disruption of the GNSS solution. It extends the delay to recover from DR situation.
Geodetics’ Epoch-by-Epoch
Geodetics Inc. has developed a new class of instantaneous, real-time precise GPS positioning and navigation algorithms, referred to as Epoch-by-Epoch (EBE) and employing hybridized dual-frequency differential GPS with a high-performance IMU.
Compared to conventional real-time kinematic (RTK), integer-cycle phase ambiguities are independently estimated for each and every observation epoch. Therefore, complications due to cycle slips, receiver loss-of-lock, power and communications outages, and constellation changes are minimized. There is no need for the initialization period (several seconds to several minutes) required by conventional RTK methods.
More importantly, there is no need for re-initialization immediately following loss-of-lock problems such as those that occur when a mobile GPS receiver passes under a bridge or other obstruction, or when it loses satellite visibility during a shaded portion of road. In addition, EBE provides precise positioning estimates over longer reference-receiver-to-user-receiver baselines than conventional RTK.
This feature supports testing for long-range operations, for example, such as positioning a vehicle on a lane. The reference receiver is set in the vicinity of the test center track.
EBE requires the use of a minimum of two receivers, each of which is tracking a common set of five or more satellites and providing simultaneous dual-frequency phase data. Typically, one of the receivers is stationary, but this is not a requirement.
EBE has been proven utilizing dual-frequency receivers and operating at distances of up to 50 kilometers from the nearest base station in unaided mode. Additionally, the EBE algorithms operate in a network environment and make optimal use of all GPS measurement data at each epoch, gracefully degrading the position accuracies when some measurement data are not available. Furthermore, the system will make use of an IMU system, compensating for outages when line-of-sight to the satellites is blocked. This produces a robust and more reliable system.
Epoch-by-Epoch can deliver several benefits including:
Computationally efficient algorithms that provide a position estimate based on a single epoch in several milliseconds. This allows the real-time position estimate to be computed on the user platform (assuming reference station data is sent to the user platform).
An initialization period is not required. Since RTK requires some period of time (that can be measured in seconds to minutes) to perform ambiguity resolution, this is an important capability for platforms that:
require high accuracy (for example, for end-game scoring);
cannot see the satellites until launch;
have short flight or test course duration;
A re-initialization period following loss-of-lock is not required, unlike RTK, which needs to restart the integer-cycle phase ambiguity resolution process. This is another important capability because vehicle monitoring is considering EBE for dynamic applications where loss-of-lock and loss-of-data are likely.
However, it must be mentioned that many of the GPS receivers in use by the test (and training) community today do not support this dual-frequency requirement. Hence, those systems could not realize the maximum benefit.
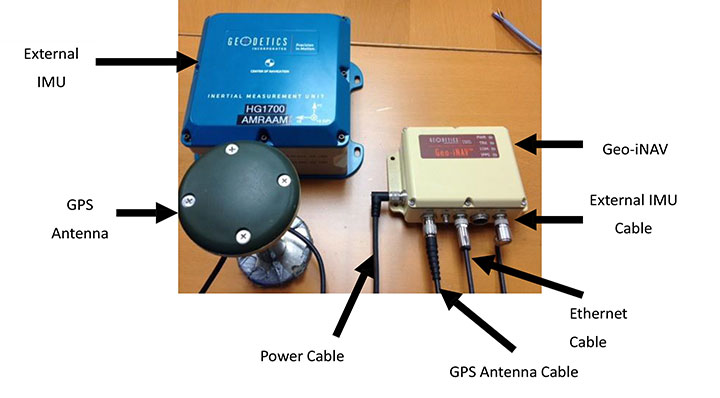
This technology is implemented in a rugged modular platform (Figure 3) with three main units:
A dual-frequency GPS antenna,
An integrated INS coupling GPS receiver with either an internal MEMS IMU or external IMU,
An external fiber-optic gyroscope (FOG) IMU for high-end accuracy and reliability. The external IMU is optional and dedicated to increasing the DR capability.
Figure 3. Dual-frequency differential navigation unit hybridized with external fiber-optic gyro.
Performance. Tests have been performed in conditions close to the land-vehicle navigation validation. It is based on measurements on-the-fly with no post-processing except for evaluation of the error.
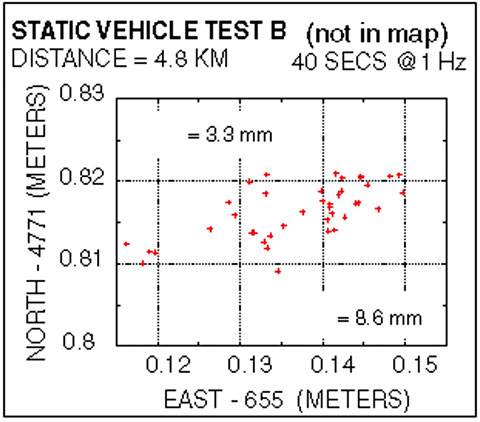
The first case is a static position of the rover 4.8 kilometers away from the reference receiver. Positions are updated once per second. The system includes a FOG IMU. the lateral error peak is less than 4 centimeters. Bias error is less than 1 centimeter. See Figure 4.
Figure 4. Single point error when rover is static.
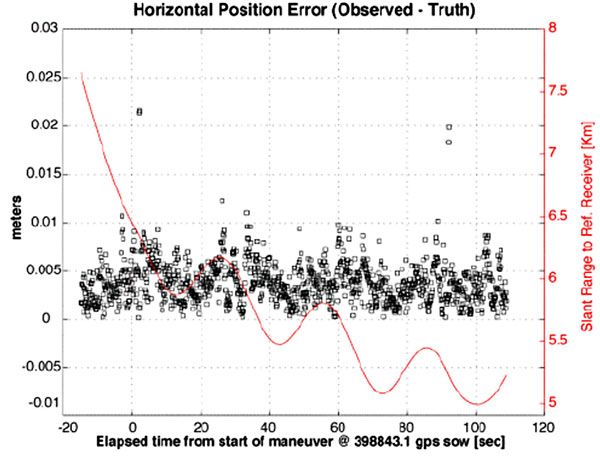
The second test case is with a high-dynamic mobile platform, moving at a speed of 200 km/h, with an average distance from the reference to the rover of 6 kilometers. Lateral error standard deviation is 0.5 centimeters, peak error is less than 2.2 centimeters. Bias error is lower than 0.2 centimeters (Figure 5).
Figure 5. Dynamic trial test single point error.
The performance in these test cases meets the expected accuracy for validation of autonomous navigation.
One last method to increase accuracy is to switch to a different class of IMU performance, from tactical grade to advanced. When in the line-of-sight of the GNSS sky-view, the performance is the nearly the same.
Conclusion
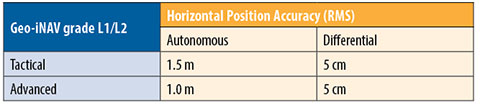
A real-time, differential Epoch-by-Epoch, dual-frequency carrier-phase GPS receiver, tightly hybridized with a high-performance IMU can provide absolute error lower than 5 centimeters in the 10-kilometer baseline range of the reference static receiver. This is fully adapted to the qualification of driverless auto-pilot systems for the targeted year of 2020. It can avoid the need to use complex theodolite and vision calibration systems. It provides maximum flexibility and minimum sustaining costs.
Acknowledgment
This study has been made possible thanks to materials provided by Geodetics Inc. and the advice of Jeffrey A. Fayman, vice president, Business & Product Development, Geodetics Inc. The results displayed in Figures 4 and 5 are from a test with a medium-sized UAV from Allied Drones, model EF44 high-endurance quad.
Manufacturers
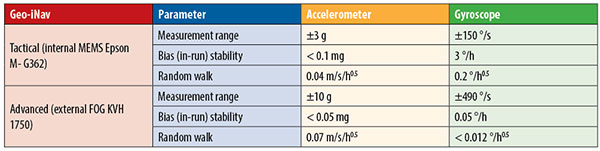
The Geo-iNAV family is a range of GPS-aided INS solutions available in different configurations, including various GPS receivers (L1, L1/L2 RTK, SAASM), internal MEMS or external FOG IMU. As part of this family, the Geo-RelNAV provides differential GPS relative navigation capability, the Geo-hNAV includes a dual GPS antenna receiver for static heading measurement capability, and the Geo-PNT combines position and attitude measurement with precise timing distribution.
Gilles Boime is is chief scientist for Spectracom. He is involved in GNSS signal generator, hybridized navigation platforms, GNSS timing and synchronization innovative solutions build-up. He holds an engineering diploma in telecommunication from Institut Superieur d’Electronique de Paris.
Emmanuel Sicsik-Pare is strategic product manager for Spectracom. He is involved in timing and navigation products and systems definition and application market monitoring. He holds a M.Sc degree from Telecom Bretagne.
John Fischer is CTO of Spectracom. He has more than 30 years experience creating navigation and communications systems, received his master’s in electrical engineering from SUNY at Buffalo. Prior to joining Spectracom, he worked in radar, command and control, and wireless systems.