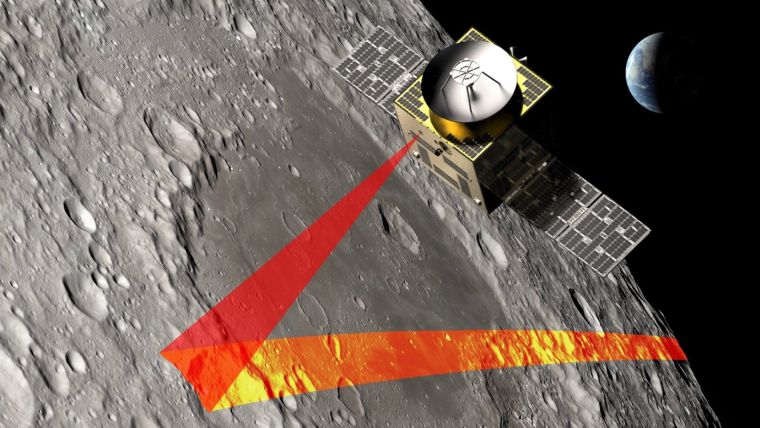
SFL Missions joins a team led by NUVIEW GmbH, which the European Space Agency has contracted to conduct a Pre-Phase A study for the Moonraker lunar mapping mission. This study launches under a new initiative for Small Exploration Missions. The Moonraker satellite will carry a laser scanner to create a detailed elevation map of the Moon’s surface.
The Moonraker mission will deploy a single orbiter in a low-altitude polar orbit around the Moon. The orbiter will host a lidar payload to capture highly accurate elevation points of the terrain. The team will use these data points to generate three-dimensional elevation models, which will guide the assessment and selection of future lunar landing sites.
Moonraker’s lidar data also seeks to advance broader scientific research. The mission will scan permanently shadowed regions to search for water ice and provide new insights into the Moon’s geology and internal composition. The Moonaker lidar will operate in two modes: one for broad-area scanning of the lunar polar regions and another for high-resolution surveys of specific areas of interest.
SFL Missions shared in a statement that Mission analysts are evaluating potential launch options and trajectories to efficiently enter lunar orbit. They are also studying how operational orbit parameters affect spacecraft design and payload data collection. The system design team focuses on accommodating the payload, configuring the spacecraft layout, and sizing subsystem components. They are designing the propulsion system to carry enough fuel for the transit phase and to maintain the operational orbit, compensating for disturbances from the Moon’s irregular gravity field. The team is developing detailed mission and system requirements to guide future design phases.
NUVIEW GmbH, based in Berlin, leads the Pre-Phase A study team, which includes several partners alongside SFL Missions. NUVIEW GmbH, a wholly owned subsidiary of NUVIEW Inc., is developing the world’s first commercial space-based LiDAR constellation for three-dimensional mapping of Earth.
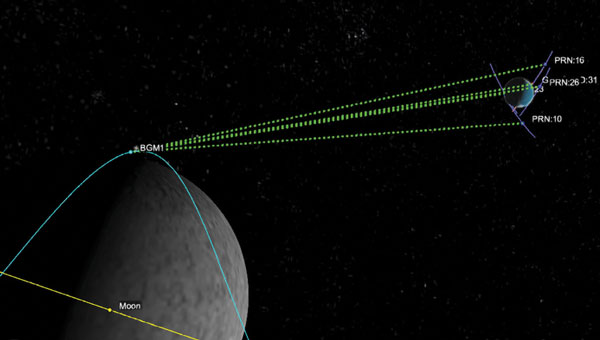
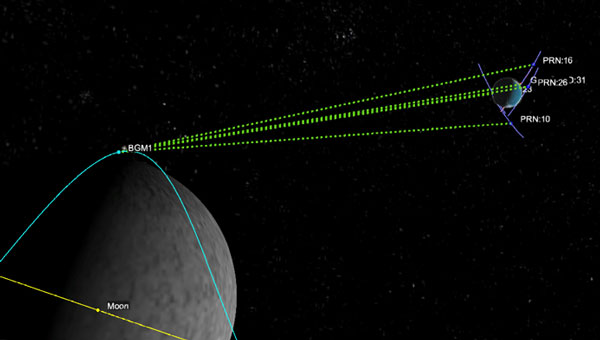
GMV has presented the latest results from its Enabling High-Performance PNT in the Lunar Environment (LUPIN) project, following a series of field tests conducted from April 27 to May 8 in La Oliva, on the Spanish island of Fuerteventura. The LUPIN initiative, developed in collaboration with the European Space Agency (ESA), aims to create a prototype navigation system that simulates the signals lunar surface rovers are expected to receive in the future. The goal is to establish a navigation system for the Moon similar to GPS on Earth, enabling more precise and reliable positioning for lunar missions.
As renewed interest in lunar exploration grows, the need for advanced technologies to support rovers, landers and potential human activities on the Moon has become a strategic priority for the space sector. ESA is pursuing this project under its Navigation Innovation and Support Program (NAVISP), seeking to test new positioning, navigation and timing (PNT) technologies. These technologies will integrate current planetary navigation approaches with distance measurement signals from the future Lunar Communication Navigation System (LCNS), a network of satellites orbiting the Moon that will provide GPS-like signals to the lunar surface. The system is being designed to serve specific lunar regions, including the south pole, the far side and permanently shadowed areas.
Navigation on the Moon currently faces significant challenges. Unlike Earth, the Moon lacks a satellite infrastructure like GPS, forcing spacecraft and rovers to rely on internal calculations and data relayed from Earth, which limits real-time location accuracy. The LUPIN prototype aims to address these limitations by reducing dependence on complex onboard algorithms and optimizing the performance of lunar exploration vehicles. Over the next decade, this technology is expected to transform how astronauts and vehicles operate on the lunar surface, enabling faster and more efficient route planning and reducing the computational burden required for navigation. This advancement means rover speeds will be limited only by lunar surface conditions, not technical constraints, potentially ushering in a new era of automated lunar exploration.
During the recent test campaign in Fuerteventura, the LUPIN system’s real-time navigation capabilities were successfully verified and validated. The tests simulated the LCNS positioning signals that future lunar rovers will use to determine their exact location. Steven Kay, GMV’s manager for the LUPIN project, explained the field tests performed and the corresponding details.
“We were able to successfully compile data over the course of 7 km of travel, and at various speeds, from the conventional 0.2 m per second, up to much faster speeds of 1.0 meters per second, which are the speeds of the future. In addition, we were able to simulate a whole range of lunar conditions and types of environments. This included tests performed at night, using a combination of simulated sunlight to emulate the illumination conditions found on the Moon, as well as tests performed in total darkness, using only the rover’s onboard lighting system to navigate,” Kay said.
The LUPIN project is part of broader efforts by ESA and its partners to develop lunar communication and navigation services, which are seen as essential for future scientific, commercial and human activities on the Moon
The latest historic chapter in GNSS for space users was launched, as one would expect, at an Institute of Navigation (ION) GNSS+ conference — the one in Miami in 2019 — by a handful of technical and policy experts well positioned to “Go for the Gold” — GNSS on the moon! Thus, liquid refreshments in hand, the Lunar GNSS Receiver Experiment (LuGRE) concept was born, amongst excited discussion and scribbling on napkins by Oscar Pozzobon (Qascom), Joel Parker (NASA), Frank Bauer (NASA), Alberto Tuozzi (Agenzia Spaziale Italiana or ASI, Italian Space Agency), Lisa Valencia (NASA) and James “JJ” Miller (NASA).
Long before this productive, informal brainstorming session, global navigation satellite systems (GNSS), such as the U.S. GPS, were originally designed for use on or near Earth, providing positioning, navigation and timing (PNT) services up to an altitude of about 3,000 km (the GPS Terrestrial Service Volume). Over the decades, experimental missions pushed GNSS use higher, and by 2006, GPS specifications defined a Space Service Volume, extending GNSS services out to 36,000 km (geosynchronous orbit). NASA missions then deftly demonstrated GNSS utility well beyond Earth orbit — notably in 2019 with the Magnetospheric Multiscale Mission spacecraft formation, which successfully tracked GPS signals roughly 192,500 km from Earth, setting the world record for farthest and fastest reception of any GNSS signals in the space domain.
Building on this success, NASA proposed conducting the LuGRE in 2020 by using a combination of GPS and Europe’s Galileo signals at lunar distances. The flight opportunity for a lunar mission came through NASA’s new Commercial Lunar Payload Services (CLPS) initiative, and by early 2021, Firefly Aerospace was awarded the mission to carry LuGRE to the moon. The LuGRE team was very fortunate from the start, competing for and winning the last of 10 payload slots, and the only space operations flight demonstration amongst nine other science payloads focused more on assessing the lunar environment.
The progress of this initiative reflects a broader national and international push based on NASA’s role in implementing the 2021 U.S. Space Policy Directive-7, which directs NASA to work with the U.S. Space Force and other partners to extend GNSS capabilities farther into cislunar space to benefit both government and commercial users. Internationally, GNSS providers further cooperate through the UN-sponsored International Committee on GNSS to develop interoperable PNT standards for space users beyond Earth. So, ASI was a natural fit to become NASA’s international partner. The Italian GNSS company Qascom was awarded the receiver development, while the Polytechnic of Turin provided academic support. This historic groundwork has thus set the stage for the recent LuGRE mission to achieve several accomplishments in lunar navigation, breaking three world records in the process.
Mission overview: Blue Ghost Lander and CLPS
The LuGRE payload traveled to the moon aboard Blue Ghost Mission 1, a robotic lunar lander built by Firefly Aerospace under NASA’s CLPS program. CLPS, started in 2018, is a public-private partnership model through which NASA contracts commercial landers to deliver science and technology payloads to the lunar surface. Blue Ghost Mission 1 launched on Jan. 15, 2025, via a SpaceX Falcon 9 rocket and touched down on March 2, 2025. This made Firefly the first U.S. commercial company to successfully land on the moon upright, delivering 10 NASA-sponsored payloads, including LuGRE. The lander targeted a site near Mons Latreille in Mare Crisium, achieving a precision landing within ~100 m of the aim point. Built as a solar-powered lander about 2 m tall and 3.5 m wide, Blue Ghost was designed for a mission duration of one lunar day (~14 Earth days). By leveraging CLPS, NASA rapidly deployed LuGRE and other instruments, demonstrating the effectiveness of commercial partnerships in advancing lunar exploration. Blue Ghost’s successful landing and operations validated this approach and set the stage for upcoming CLPS missions in support of Artemis.
The LuGRE payload: Objectives and components
LuGRE is a technology demonstration aimed at determining whether Earth-originated GNSS signals can be reliably received and used for navigation at the moon’s distance. The payload was jointly developed by NASA and ASI with engineering by Qascom. Hardware on LuGRE includes a specialized weak-signal GNSS receiver, a high-gain L-band patch antenna array with RF filtering and a low-noise amplifier. This design allows it to track faint GPS and Galileo signals nearly 400,000 km from their transmitters. LuGRE specifically listens on multiple frequencies — GPS L1 and L5, and Galileo E1 and E5a — to maximize signal acquisition opportunities. The experiment’s objectives are threefold: (1) acquire and characterize GNSS signals in lunar orbit and on the surface, (2) demonstrate navigation fixes (position/time) using those signals at the moon, and (3) return data to inform the development of future lunar-specific GNSS receivers. All three of LuGRE’s objectives were met. During the mission, LuGRE began collecting and processing data en route to the moon (during a ~45-day transit) and also on the lunar surface after landing. As one of the first demonstrations of GNSS use on another world, LuGRE set out to prove that combined GPS/Galileo signals could enable autonomous navigation for spacecraft far beyond Earth.
A SpaceX Falcon 9 rocket carrying Firefly Aerospace’s Blue Ghost Mission 1 lander prepares for a launch to the moon on Jan. 14, 2025, from Launch Complex 39A at the agency’s Kennedy Space Center in Florida. (Photo: NASA / Kim Shiflett)
Benefits of GNSS for lunar PNT
If proven reliable, GNSS-based navigation at the moon offers significant benefits for future lunar missions. First, it provides a common PNT framework for lunar explorers, akin to GPS on Earth, enabling precise real-time positioning and time synchronization for astronauts and robotic systems. This could allow lunar crews and rovers to navigate autonomously across the surface without constant ground support, reducing astronaut workload and dependence on Earth-based tracking. Accurate GNSS-derived position data improves safety and efficiency — for example, helping rovers avoid hazards and chart optimal routes or aiding astronauts in pinpointing resources, such as water, ice or scientific targets. Using existing GNSS signals also means that missions might rely less on cumbersome radio tracking from Earth or lunar beacons, simplifying mission operations.
In the long run, GNSS technology can support the development of lunar infrastructure: future base camps, power stations and landing pads could all reference a shared navigation grid, much as terrestrial infrastructure does. Additionally, leveraging well-known GPS/Galileo signals could reduce costs and technical risks, supplementing a proposed new lunar navigation satellite network.
LuGRE’s results have affirmed these possibilities. During transit, LuGRE broke records by tracking signals at 395,900 km out in lunar orbit, proving multi-constellation GNSS can aid navigation to and around the moon. Shortly after landing, it further demonstrated an autonomous GNSS navigation fix on the lunar surface, 362,100 km from Earth. These achievements suggest that even existing Earth-centric satnav can be extended to serve lunar exploration, a promising development for upcoming Artemis endeavors.
Challenges of GNSS reception on the moon
Adapting GNSS to the lunar environment is challenging. The main difficulty is the weakness of signals by the time they reach the moon. GNSS satellites orbit around 20,000 km from Earth, beaming most of their signal power toward Earth’s surface. At nearly 10 times that distance, only the spillover (side-lobe) signals reach the moon, arriving attenuated and sparse. This necessitates high-sensitivity receivers and high-gain antennas (such as LuGRE’s) to even detect the signals, along with sophisticated algorithms to pull meaningful data from the noise. The geometry and coverage also pose issues: a receiver on the moon will often see a limited number of GNSS satellites above its horizon, potentially affecting the accuracy and availability of navigation fixes. Local lunar conditions add further complications. The moon’s lack of atmosphere means no ionospheric delay, which is a positive for signal clarity. However, it also means that there is nothing to refract or scatter signals over the horizon — thus, terrain plays a crucial role. Rugged topography (mountains, crater rims) can block line-of-sight to GNSS satellites, and deep craters or polar shadowed regions might have very poor reception.
The pervasive lunar dust (regolith) can also be problematic because it may coat antenna surfaces or contribute electromagnetic noise, especially during landings or surface activities. These factors require advanced processing techniques and possibly integrating GNSS with other sensors to achieve reliable navigation. LuGRE’s design and operations were tailored to confront these challenges. For instance, using dual constellations doubles the pool of satellites and signals available, and collecting data both in orbit and on the surface helps characterize how signal quality changes in different lunar conditions. The knowledge gained will guide the development of next-generation lunar GNSS receivers with improved robustness against weak signals and intermittent coverage.
Firefly aerospace’s Blue Ghost Mission 1 lander is carrying 10 NASA science and technology instruments to the moon as part of NASA’s CLPS initiative and Artemis campaign. (Photo: Firefly Aerospace)
Implications for Artemis and deep space navigation
LuGRE’s success is a proof of concept that navigation aids from Earth can directly support moon missions. This is of immediate relevance to NASA’s Artemis program, which aims to return humans to the moon and establish a sustained presence there. Artemis crewed vehicles (such as the Orion spacecraft) and the planned Gateway lunar station could potentially use GNSS signals during transit or in lunar orbit to autonomously determine their trajectories. On the surface, future Artemis astronauts and rovers could carry GNSS-enabled devices to know their precise location without relying solely on Earth-based tracking. This capability will become increasingly important as activities expand — from pinpoint landing of resupply craft, to coordinating lunar base operations to enabling the first long-distance treks by crew or robots on the moon.
By proving GPS/Galileo usability at the moon, LuGRE also paves the way for establishing a standardized lunar reference frame tied to existing GNSS, which all international partners can use for joint operations. In a broader sense, LuGRE is a stepping-stone toward more advanced navigation systems in deep space. It demonstrates techniques (such as combining multiple GNSS constellations and using high-sensitivity receivers) that could inform navigation around Mars or other distant targets. While Earth’s GNSS signals won’t reach Mars with useful strength, the lessons learned can drive the design of Mars-orbiting navigation satellites or better onboard autonomous nav systems for deep-space probes. In essence, the experiment is accelerating the development of a GPS-like interplanetary navigation capability, crucial for humanity’s expansion deeper into the solar system.
A Graphic representation of the relative geometry of Earth-moon-acquired GNSS satellites. (Photo: Agenzia Sapaziale Italiana)
Policy and international collaboration
The LuGRE mission exemplifies how international and commercial partnerships are shaping the future of space exploration. It was born out of a long-running collaboration between NASA’s Space Communications and Navigation program and ASI, reflecting a shared strategic interest in extending GNSS interoperability to the moon and beyond. The receiver hardware was developed by Qascom with academic support from Politecnico di Torino, underlining the role of industry and academia in innovation.
This NASA-ASI partnership built on earlier joint projects, such as GNSS receiver experiments on the ISS and suborbital flights, which tested using both GPS and Galileo for space navigation. Europe’s Galileo system, in particular, is a full partner in LuGRE. Its inclusion alongside GPS ensures that the experiment benefits from multi-constellation redundancy and also sends a message of GNSS interoperability, a key principle endorsed by the International Committee on GNSS. On the policy front, the mission aligns with U.S. space policy goals to develop services in cislunar space and encourages momentum in international standardization of lunar PNT frameworks.
Data from LuGRE will be made public, contributing to global research and possibly the drafting of new standards for lunar navigation that any nation’s spacecraft can adopt. The CLPS program itself, which enabled LuGRE’s delivery, represents a policy shift toward commercial sourcing of lunar services — fostering a market where companies such as Firefly, intuitive Machines, Astrobotic and others compete and cooperate to advance lunar science. As NASA leads the Artemis coalition with agencies from Europe, Asia and beyond, the LuGRE experiment offers a tangible product of cooperation: a foundation for shared navigation infrastructure at the moon. This collaborative, forward-looking approach will be critical as humanity returns to the moon not just to visit, but to stay.
Conclusion
LuGRE on Firefly’s Blue Ghost lander has marked a milestone in space exploration: it demonstrated for the first time that navigational signals conceived for Earth can be harnessed on the lunar surface. By uniting cutting-edge technical work (in receivers and antennas) with visionary policy support (via NASA’s CLPS and international GNSS cooperation), LuGRE showcases a path toward robust, autonomous navigation for the Artemis generation of missions. Achieving a GPS/Galileo fix on the moon is more than a symbolic first — it is a practical step toward a future where astronauts and robots navigate the moon — and one day Mars — with the same confidence as we do on Earth. The lessons from LuGRE will inform how we guide our spacecraft across the cislunar void, how we set up the positioning networks of tomorrow’s lunar bases and how nations cooperating can build the navigation backbone for a new era of deep-space exploration. In short, LuGRE has opened the door for GNSS to become an integral part of the lunar toolkit, blending technology and policy into a giant leap for navigation beyond Earth.
The Japan Aerospace Exploration Agency (JAXA) has selected Spirent Communications to supply its lunar positioning, navigation and timing (PNT) simulation solution. The solution will support JAXA’s lunar exploration efforts and aid in developing essential navigation infrastructure for future moon missions.
Spirent’s PNT X solution allows JAXA to simulate lunar PNT services in a controlled laboratory setting before their deployment on the moon. This capability is critical for testing and validating navigation equipment for lunar missions in accordance with the emerging LunaNet specifications, which include adaptable S-band frequency solutions. The system also ensures scalability for future space exploration.
Using the PNT X system, JAXA can experiment with novel S-band signals and evaluate the performance of receivers that rely on standalone S-band Lunar PNT signals or a combination of Lunar PNT and Earth-based L-band GNSS infrastructure. The simulation of these signal combinations demands high levels of precision, which Spirent’s specialized architecture is designed to meet.
This collaboration builds on a longstanding relationship between Spirent and JAXA. In 2011, JAXA utilized Spirent’s simulation technology to verify the performance of early Quasi-Zenith Satellite System (QZSS) receivers. Since then, Spirent simulators have supported multiple advancements in QZSS.
Spirent’s lunar PNT simulation solution seeks to present new opportunities for space agencies developing lunar constellations, satellite and receiver developers and organizations planning lunar missions or seeking to establish additional PNT infrastructure on the moon.
The LuGRE receiver acquired and tracked GPS and Galileo satellite signals in lunar orbit on Feb. 19, operating at 63 Earth radii (approximately 401,814 km from Earth). Developed by Qascom for the Italian Space Agency in collaboration with NASA and supported by Politecnico di Torino, the receiver is integrated into Firefly Aerospace’s Blue Ghost 1 lander as part of NASA’s Commercial Lunar Payload Services program.
During the lander’s lunar transit, LuGRE tracked signals in the L1/E1 and L5/E5 frequency bands. The farthest signal detected came from the Galileo constellation at 67.79 Earth radii (approximately 432,384 km from the receiver). The experiment demonstrated GNSS functionality near the Moon, where the lander orbited approximately 1.66 km/s1.
Despite the challenges of distance and velocity, the receiver achieved position accuracy within 1.5 km and velocity accuracy within 2 m/s. It successfully acquired signals from four GPS satellites (L1 and L5 frequencies) and one Galileo satellite (E1-E5 bands) during a one-hour observation window. Post-landing, LuGRE will attempt to receive GNSS signals on the lunar surface for 14 days.
NASA and the Italian Space Agency (ASI) are collaborating on the Lunar GNSS Receiver Experiment (LuGRE), which seeks to demonstrate the viability of providing positioning, navigation and timing capabilities on the moon using GPS and Galileo signals.
LuGRE’s payload consists of a weak-signal GNSS receiver, a high-gain L-band patch antenna, a low-noise amplifier and an RF filter. The receiver is designed to track GPS L1 C/A and L5 signals, as well as Galileo E1 and E5a signals. It will collect pseudorange, carrier phase and Doppler measurements, calculate onboard navigation solutions, and have the capability to record raw I/Q baseband samples for ground processing.
NASA‘s Space Communications and Navigation (SCaN) Program office funded and oversaw the experiment. It was selected as one of ten research and technology demonstrations for lunar surface delivery by Firefly Aerospace, under NASA’s Commercial Lunar Payload Services (CLPS) initiative.
LuGRE builds upon previous missions in the Space Service Volume, including experiments by AMSAT-OSCAR 40, GOES-R series satellites and the NASA Magnetospheric Multiscale mission. It aims to be one of the first demonstrations of GNSS signal reception and navigation in the lunar environment, potentially paving the way for operational use in future lunar missions.
The target launch date for the Blue Ghost 1 mission carrying LuGRE is Jan. 15, 2025. Upon completion, all LuGRE science data will be made available to the public for the benefit of the GNSS and space communities.
SpacePNT and European Engineering and Consultancy (EECL) delivered the final presentation of the European Space Agency (ESA)-funded project, “Earth Moon GNSS Spaceborne Receiver for In-Orbit Demonstration.” This project aims to develop the NaviMoon GNSS receiver for lunar applications. (Photo: SpacePNT)
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focused on lunar and space applications. The papers are available here.
Clock and Orbit Determination for LEO Satellites
More than 50 years after the Apollo program, there is a growing interest in establishing a sustainable human presence on the moon, with various missions being planned in different lunar orbit regimes to support lunar exploration. To address the challenges of navigation in the lunar environment, researchers have proposed a technique leveraging time-differenced carrier-phase (TDCP) measurements from GPS satellites, which offer millimeter-level accuracy when integer ambiguities are correctly fixed.
The proposed framework utilizes an extended Kalman filter that combines intermittently available terrestrial GPS TDCP values with gravitational accelerations predicted by an orbital filter. To handle the unique challenges of the lunar environment, such as weak gravity and strong third-body perturbations, the researchers implement an adaptive state noise compensation algorithm and introduce an augmented state vector to address time correlations across TDCP measurements. Through Monte Carlo simulations of lunar satellites in various orbits, the technique demonstrates improved positioning and onboard timing accuracy compared to pseudorange-only navigation solutions.
Keidai Iiyama, Sriramya Bhamidipati and Grace Gao, “Precise Positioning and Timekeeping in a Lunar Orbit via Terrestrial GPS Time-Differenced Carrier-Phase Measurements.”
Satellite Ephemeris Parameterization for Lunar Navigation
This paper explores the development of satellite ephemeris parameterization methods for lunar navigation systems. As space agencies plan to establish satellite networks around the moon for communication and positioning, navigation and timing (PNT) services, the authors investigate optimal techniques for efficiently and accurately broadcasting satellite ephemeris data to lunar users. They propose a framework that directly approximates satellite position and velocity in the inertial frame, using signal-in-space-error requirements as constraints to guide the search for the best ephemeris parameter set.
The study evaluates different methods based on ephemeris prediction precision, fit interval and message size. It demonstrates the framework’s ability to approximate satellite ephemeris for both low lunar orbits and elliptical lunar frozen orbits while meeting signal-in-space-error requirements. The research considers polynomial and Chebyshev basis types for surrogate models and evaluates performance based on precision and orbital coverage. By quantifying the broadcast message’s fit interval and size, the authors aim to guide the selection of optimal parameterization methodologies for lunar navigation systems.
Marta Cortinovis, Keidai Iiyama and Grace Gao, “Open Access Satellite Ephemeris Parameterization Methods to Support Lunar Positioning, Navigation, and Timing Services.”
Improving Navigation Accuracy in GEO
The authors introduce a new approach to improving the accuracy of satellite position determination in geostationary equatorial orbit (GEO). They propose integrating a regional navigation satellite system (RNSS) with GNSS. Specifically, they suggest using RNSS signals, such as those from the Quasi-Zenith Satellite System (QZSS), to complement the signals provided by GNSS for GEO satellites.
The research addresses the challenges faced by GEO satellites in using GNSS signals, including poor dilution of precision (DOP) and significant radial errors due to limited observability. By incorporating RNSS signals, the researchers aim to improve the diversity of signal directions and enhance navigation precision. The paper demonstrates the feasibility of receiving QZSS signals across a substantial range in GEO through link budget analyses. Two comprehensive simulations were conducted: a point solution and an extended Kalman filter-based orbit determination. The results confirm the anticipated improvement in navigation precision indicated by the DOP analysis.
While RNSS signals can be received from any longitude in GEO, enhanced navigation precision depends on the distance between the satellite and the RNSS. The authors suggest that this concept can be adapted to various longitudes within GEO by selecting appropriate RNSS options and promoting stable, high-precision navigation.
Yu Nakajima and Toru Yamamoto, “Enhancing Navigation Accuracy in a Geostationary Orbit by Utilizing a Regional Navigation Satellite System.”
Integrating Orbit and Attitude Precision for CubeSat Positioning
This research paper addresses ways to enhance CubeSat capabilities for demanding missions, particularly in low Earth orbiting positioning, navigation and timing (LEO-PNT) systems. The authors propose an array-aided combined precise orbit and attitude determination model that offers an optimal solution to improve orbital accuracy and provide reliable attitude information. By utilizing multi- and affine-constrained models for precise attitude determination and reconstructing highly precise observations for an antenna array, the method addresses the challenges of higher orbital accuracy and reliable attitude information required for advanced applications.
The authors recorded significant improvements in orbital accuracy and attitude determination. Validation results show that reconstructed observations outperform original ones, leading to improved orbital components with a three-dimensional root mean square (RMS) of 4.1 cm. Additionally, observation residuals are smoother, with an RMS of 6 mm, half of that obtained via a single antenna. The results show a promising solution for enhancing CubeSat capabilities, particularly for applications requiring high-precision orbit and attitude information.
Amir Allahvirdi-Zadeh and Ahmed El-Mowafy, “Array-Aided Precise Orbit and Attitude Determination of CubeSats using GNSS.”
ArkEdge Space, a Japanese space start-up based in Tokyo, has been selected by the Japan Aerospace Exploration Agency (JAXA) under its Space Strategy Fund to lead the development of advanced lunar navigation technology.
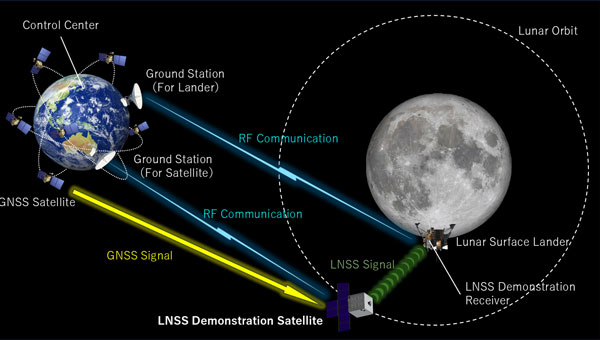
Under the agreement, ArkEdge Space will plan and design the mass production and operation of micro-satellite constellations to lead the development of a next-generation Lunar Navigation Satellite System (LNSS), a vital component to the International “LunaNet” initiative driven by National Aeronautics and Space Administration (NASA), European Space Agency (ESA) and JAXA. LunaNet seeks to establish essential infrastructure to support sustainable lunar exploration and foster the growth of the lunar economy.
This program, supported by up to 5 billion yen ($32.5 million) over four years, tasks ArkEdge Space with developing a 100 kg class micro-satellite, developing crucial technology including the:
Lunar navigation payload
Demonstration satellite platform, along with a system operations plan
Establishment of an approach to mission evaluation
These efforts will help reduce development costs and timeframes while advancing core LNSS technologies and enabling the development of future lunar navigation system demonstration satellites, according to ArkEdge Space.
ArkEdge Space’s work on LNSS leverages its expertise in satellite technology and builds on its ongoing collaboration with JAXA. A key innovation of the project involves the use of faint GNSS signals, originally designed for Earth, to determine satellite position and time in lunar orbit—approximately 380,000 km from Earth. Additionally, LNSS complements advancements in low-Earth Orbit positioning navigation and timing (LEO-PNT) systems, designed to provide high-precision, robust navigation services globally, enhancing existing GNSS infrastructure.
As lunar exploration accelerates, high-precision infrastructure has become indispensable for activities such as rover navigation, base construction, and in-situ resource utilization. LNSS supports lunar operations and serves as a stepping stone for future exploration of Mars and deep space.
SpacePNT and European Engineering and Consultancy (EECL) have completed the final presentation of the European Space Agency (ESA)-funded Earth Moon GNSS Spaceborne Receiver for In-Orbit Demonstration project. This project aimed to develop and qualify the NaviMoon GNSS spaceborne receiver for lunar applications.
Currently, geostationary orbit (GEO) and geostationary transfer orbit (GTO) missions utilize GNSS signals for in-orbit positioning, navigation and timing (PNT). NASA’s Magnetospheric Multiscale (MMS) mission has shown that GPS signal tracking is possible up to 150,000 km from Earth’s surface, which is half the distance to the Moon. ESA has assessed the feasibility of extending GNSS use for lunar missions through studies under its General Studies Program (GSP). These studies indicate that lunar navigation using GNSS might be feasible if specific high-sensitivity techniques are implemented in GNSS spaceborne receivers.
NaviMoon is an advanced version of SpacePNT’s spaceborne GNSS receiver NaviLEO. It supports dual constellation (GPS and Galileo) and dual frequency (E1/L1 and E5a/L5) operation. The receiver is based on commercial off-the-shelf (COTS) components with radiation mitigation measures. It features fast digital signal processing in hardware and handles acquisition, tracking control and navigation in software. NaviMoon also includes a dedicated microcontroller for interface management and can be reprogrammed in flight.
EECL contributed to the project by providing the GNSS reflectometry front end for remote sensing. The company developed the lunar low-noise amplifier (LNA), which is crucial for detecting ultra-weak signals at lunar distances.
The NaviMoon project involved comprehensive testing, including mechanical tests, thermal vacuum tests, electromagnetic compatibility testing and a full GNSS test campaign. The presentation shared that it is a robust platform with high radiation tolerance and environmental performance. It aims to deliver less than 100 m accuracy at Moon distance while reducing dependence on costly Earth infrastructure for orbit determination.
This project was funded under ESA’s NAVISP program, which is dedicated to European industrial technology innovation in the PNT sector. It also received support from ESA’s GNSS Science Advisory Committee (GSAC).
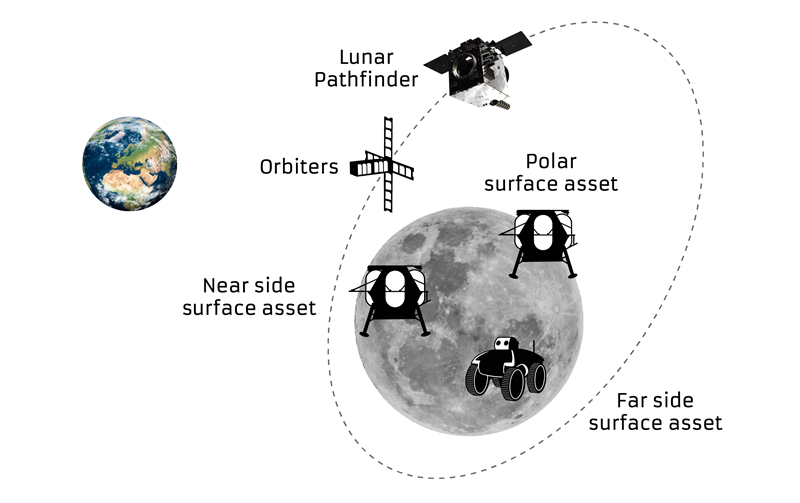
The test version of a unique satellite navigation receiver has been delivered for integration testing on the Lunar Pathfinder spacecraft.
The NaviMoon satnav receiver is designed to perform the farthest ever positioning fix from Earth, employing signals that will be millions of times fainter than those used by smartphones or cars on Earth.
The NaviMoon receiver and low-noise amplifier. (Photo: SSTL)
“This engineering model of our NaviMoon receiver is the very first piece of hardware to be produced in the context of ESA’s Moonlight initiative, to develop dedicated telecommunications and navigation services for the Moon,” explained Javier Ventura-Traveset, head of ESA’s Navigation Science Office and manager of ESA lunar navigation activities.
“It will be flown aboard the Lunar Pathfinder mission into orbit around the Moon, from where it will perform the furthest satellite navigation positioning fix ever made, at more than 400,000 kilometers away to an accuracy of less than 100 meters,” Ventura-Traveset said. “This represents an extraordinary engineering challenge, because at such a distance the faint Galileo and GPS signals it uses will be barely distinguishable from background noise. This demonstration will imply a true change of paradigm for lunar orbiting navigation.”
The washing-machine-sized Lunar Pathfinder is being built as a commercial mission by Surrey Satellite Technology Ltd. (SSTL), in the United Kingdom. ESA is funding guest payloads for it, including the 1.4-kg NaviMoon receiver that will be accommodated beside the spacecraft’s main X-band transmitter that links it with Earth.
“Receiving physical hardware for a mission is always fantastic,” said Lily Forward, SSTL system engineer. “This engineering model receiver will be integrated into our FlatSat Test Bed version of the mission to test that all our systems communicate and work together properly, ahead of receiving the flight-model receiver and antenna later this year.”
This will be SSTL’s first full-fledged mission beyond Earth, she added. “Laying the foundations for numerous scientific missions that will come after it, Lunar Pathfinder is a communications relay satellite, intended to serve assets on both the nearside and farside, orbiting in an elliptical lunar frozen orbit for prolonged coverage over the South Pole — a particular focus for future exploration. Then, during regular intervals, we will orient the spacecraft towards Earth to test out the NaviMoon receiver.”
Satnav position fixes from the receiver will be compared with conventional radio ranging carried out using Lunar Pathfinder’s X-band transmitter as well as laser ranging performed using a retroreflector contributed by NASA and developed by the KBR company.
“This will be the first time these three ranging techniques will be used together in deep space,” explained ESA navigation engineer Pietro Giordano. “There is a long heritage of lunar laser ranging, going back to the Apollo missions, and the retroreflector we are using is an evolution from NASA’s Lunar Reconnaissance Orbiter. The combination of all ranging techniques will improve the orbit estimation further, potentially beyond what radio ranging can achieve.
“In principle, this could mean that future missions could navigate themselves to the Moon autonomously using satellite navigation signals alone with no help from the ground.”
The satnav signals employed here on Earth are already vanishingly faint, equivalent to a single pair of car headlights shining all across Europe. By the time these signals reach the Moon, they have crossed distances of more than 20 times further, attenuating through space like ripples from a stone splashed in water.
“Adding to the difficulty, the satnav constellations are not designed to transmit up into space, but to keep their antennas facing Earth,” Giordano said. “So we are reliant on much weaker side-lobe signals, like light spilling from the sides of a flashlight. To be able to make use of these signals, we turned to a specialist in space-based satellite navigation, whose signal-processing techniques have really proven the magic ingredient.”
Testing the NaviMoon receiver and Low Noise Amplifier engineering models at SSTL ahead of integration testing. The flight models of the receiver and amplifier will be delivered later in 2022. (Photo: SSTL)
SpacePNT, based in Switzerland, oversaw the NaviMoon receiver design. “We began working on the idea of lunar-distance satnav positioning back in 2013 as something of a scientific challenge,” said Cyril Botteron, company head.
“The combination of Galileo dual-frequency signals with those of the existing GPS satellites is what started to make it feasible,” Botteron said. “Although, along with the extreme sensitivity that is demanded, the other big problem is that from the Moon all the satnav satellites are in the same narrow geometry of sky around Earth, periodically rotating out of view.”
Lunar navigation satellites will ultimately help guide Moon landings, such as with the European Large Logistic Lander. (Image: ESA)
The solution that SpacePNT came up with leverages more than half a century of lunar exploration. The company installed a dynamic software model of all the forces acting upon the satellite into the receiver, including the gravitational influences of the Moon, Earth, Sun and planets as well as the very slight push from sunlight itself — solar radiation pressure — along with factors such as clock error and the radio signal direction.
“As we experience a given acceleration the receiver can judge it is most probably at one particular point in its orbit,” Botteron said. “Usually a satnav receiver needs signals from four satellites to fix its position, but with this approach, less than four signals is still enough to obtain useful information, constraining the model to minimize any error drift.”
European Engineering & Consultancy (EECL) in the UK was assigned the task of turning SpacePNT’s design into fully tested hardware, and also designed the crucial low-noise amplifier that sifts through noise to boost usable signals.
Artist’s impression of the Lunar Pathfinder satellite built by Surrey Satellite Technology Ltd. (SSTL) that will provide communications and navigation services for the Moon.
NASA and its international partners are planning a return to our natural satellite. The following three papers — presented at the Institute of Navigation (ION) GNSS+ conference Sept. 20–24, 2021 — discuss the role of GNSS in lunar exploration. The full papers are available at www.ion.org/publications/browse.cfm.
Using GPS for Time Transfer
NASA and the European Space Agency have conceptualized the initial framework for a GPS-like constellation for the Moon, which will ensure uninterrupted navigation and communication services for future lunar missions. The authors designed a smallsat-based Lunar Navigation Satellite System (LNSS) with time-transfer from Earth-GPS to alleviate the size, weight and power (SWaP) and timing stability requirements of the onboard clocks. A timing filter corrects the lower grade clock when Earth-GPS signals are available and propagates these clock estimates forward in time when no Earth-GPS signals are available. The authors analyzed their proposed time-transfer technique using high-fidelity simulations of an LNSS satellite with an onboard chip-scale atomic clock for three cases of elliptical lunar frozen orbits.
Bhamidipati, Sriramya, Mina, Tara, Gao, Grace, “Design Considerations of a Lunar Navigation Satellite System with Time-Transfer from Earth-GPS,” https://doi.org/10.33012/2021.18021
GNSS Nav for Moon Missions
The authors show the potential of autonomous GNSS signal-based navigation for a set of Moon scenarios. This technology could be a game changer for the future of lunar exploration, representing an extremely low cost and effective alternative for Moon navigation. Results show that not only autonomous GNSS navigation for lunar orbiters is possible, but it also delivers good navigation performance. In fact, navigation with root-mean-square (RMS) errors on the order of 50–100 meters were obtained for scenarios of high interest, such as for the planned Lunar Pathfinder and near-rectilinear halo orbit of the Lunar Gateway space station around the Moon.
Mangialardo, Marco, Jurado, María Manzano, Hagan, David, Giordano, Pietro, Ventura-Traveset, Javier, “The full Potential of an Autonomous GNSS Signalbased Navigation System for Moon Missions,” https://doi.org/10.33012/2021.18040
Finding the best lunar orbit
A continuous and reliable lunar positioning and timing system, such as a GNSS-like constellation, is considered essential infrastructure for lunar exploration. The authors focus on halo orbits with the aim of defining an optimal halo constellation for supporting and delivering a navigation service on the Moon. This paper shows the performance of a GNSS-like constellation deployed in Halo orbits around Earth-Moon L1 and L2 collinear libration points. Different phases have been considered, from a minimum number of satellites able to provide a local PNT service on the South Pole (Initial Operational Capability), to a final, extended constellation able to cover the whole lunar surface (Final Operational Capability).
Musacchio, Daniele, Iess, Luciano, Carosi, Mattia, Capolicchio, Jacopo, Eleuteri, Massimo, Stallo, Cosimo, Di Lauro, Carmine, “Design of Earth Moon Halo Orbits for a Global Lunar PNT Service,” https://doi.org/10.33012/2021.18020
Soon, global navigation will no longer suffice. Humanity is preparing to return to the Moon after more than half a century. U.S., European, Chinese, Indian, Japanese and Russian governments and companies want a slice of the “eighth continent.”
NASA’s Artemis program, which aims to put astronauts on the Moon’s south pole in 2024, will explore more of the lunar surface than ever before. Robots and humans will search for, and potentially extract, resources such as water, which also can be converted into other usable resources, including oxygen and fuel.
Astronauts searching for spots where robotic spacecraft have pointed to the ice on the lunar map and for equipment sent on ahead of them will need precise navigation guidance. So will astronauts and ground controllers operating the Gateway outpost in Moon orbit and the Orion spacecraft. This will require extending the reach of our Earth-centric positioning, navigation and timing (PNT) systems to cover our planet’s nearest neighbor.
A permanent and reliable source of PNT on the Moon will reduce the amount of gear each mission will have to develop and carry, making more funding and rocket-lift capabilities available for scientific equipment. It also will free bandwidth on NASA’s communications networks, which have historically provided navigation services near the Moon.
NASA and the European Space Agency (ESA) are laying the foundations for this navigation system. Their efforts include the development of a special receiver able to pick up GPS signals that, already very weak on Earth, are extremely so on the Moon; NASA’s LunaNet communications and navigation architecture; ESA’s public-private Pathfinder satellite navigation and communication mission, due to launch into lunar orbit by the end of 2023; and ESA’s Moonlight initiative, which will establish lunar communication and navigation services.
Studies already have proven that it is possible to navigate between Earth and the Moon, as well as on the latter’s surface, using the side lobes of the signals from GNSS satellites. In 2023, the Lunar GNSS Receiver Experiment (LuGRE), developed in partnership with the Italian Space Agency, will demonstrate and refine this capability on the Moon’s Mare Crisium basin. NASA will use data gathered from LuGRE to refine operational lunar GNSS systems for future missions.
Besides the low signal power, other challenges to using GNSS satellites for Moon navigation include geometry, with all the signals coming from a relatively small portion of the sky; the fact that in polar regions the Earth would be low on the horizon and therefore GNSS signals could easily be blocked by hills or crater rims; and the complete occultation of the signals when moving beyond the side of the Moon always facing Earth. Meeting this last challenge will require at least a couple of Moon-orbiting satellites. (Artificial satellites orbiting our planet’s natural satellite as a supplement to the artificial satellites orbiting our planet…)
The Moon will be our steppingstone to Mars. I bet it will not be long before the Institute of Navigation establishes a Planetary Navigation division!