“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Image: BanksPhotos/E+/Getty Images
Dozens Stranded in Tundra
Several vehicles in Rock Springs, Wyoming, were stranded after being led by their map apps or vehicle navigation systems to an unmaintained county road in a blizzard. Several calls were made to the Sweetwater County Sheriff’s Office about stranded vehicles stuck after they were directed to the detour when Interstate 80 was closed due to winter conditions. Similar incidents were reported by other counties, resulting in discussions between the Wyoming Department of Transportation and the companies that develop navigation software.
Screenshot: CBS video
UAVs contain Western Technology
A Ukrainian intelligence assessment obtained by CNN and CBS reported an Iranian UAV downed in Ukraine contained technology from companies in the United States and other western countries. The White House has since launched an investigation as to how the technology — including semiconductors, GPS modules and engines — were obtained by Iran. The components removed from an Iranian Shahed-136 UAV totaled 52, 40 of which were manufactured by 13 different U.S. companies. The remaining components were manufactured by other western companies and by companies based in Japan, Taiwan and China.
Researchers may now be able to monitor climate-induced natural hazards by combining satellite technology with machine learning. Researchers were able to use machine learning to study hurricanes that made landfall over the Gulf of Mexico in a series of recent experiments. C.K. Shum, the co-author of the study and a professor at the Byrd Polar Research Center, uses geodesy to study global climate change phenomena. Using geodetic data gathered from satellites, Shum tested whether a mix of remote sensing and machine learning analytics could accurately monitor weather phenomena. Accurate measurements could help improve hurricane forecasting.
Sailboat. (Image: valio84sl/iStock / Getty)
The power of TikTok is real
TikTok changed Jeff Foulk’s life when his daughter posted about his free marine navigation app, Argo, when they attended a boat show in Chicago. Foulk was promoting Argo with little success, until his daughter shared with the social media platform his struggle as the owner of a small business. Since then, the app has been downloaded more than 200,000 times and remains at the top of the charts for boat navigation apps. Argo was launched more than four years ago and, until now, had only 100,000 total downloads. Now that Argo is viral, Foulk wants to launch a premium subscription.
A year-long project aboard a commercial cargo ship collected tens of thousands of snapshots of radio-frequency interference in the GNSS band on a passage from Spain to Korea and back. Most interference was detected in busy port areas, less interference while transiting along coasts, and while least frequent, interference was still found in the open ocean.
Researchers at the German Aerospace Center (DLR) are still analyzing the vast amount of GNSS disruption data collected during the year-long project. Two papers have already been published about this project, and more are on the way, according to principle researcher Emilio Pérez Marcos.
In a paper presented at the Institute of Navigation last year, Marcos and his co-authors outlined the results of the last five months of this unique sampling experiment. Detection equipment was mounted on a large Hapag-Lloyd container ship. The antenna was mounted about 50 meters above the water line and provided a line-of-sight of 25km or more. The L1/E1 and L5/E5a frequency bands were continuously monitored. In addition to a “Snapshot” recording device used to save raw data samples (time snapshots), a more resilient DLR multi-antenna receiver was used to assess the impact of interferences in beamforming array GNSS receivers (semi-resilient).
As might be expected, the most interference was detected in busy port areas. Less interference was experienced while transiting along coasts. While it was the least frequent, interference was still detected during open ocean transits.
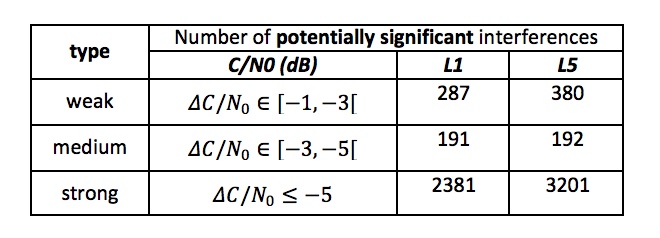
Table: Emilio Pérez Marcos and co-authors
Of the 39,045 snapshots recorded, 6,632 contained radio frequency interference at 1dB or higher. Separate tests have shown that many single antenna GNSS receivers begin to perform poorly with interference signals greater than 1dB. The other 32,413 snapshots could represent interference signals that may have come from weaker transmitters, sources more distant from the ship, been the result of adjacent band transmissions, or other phenomena.
Three particularly strong and persistent interference incidents were noted in the paper.
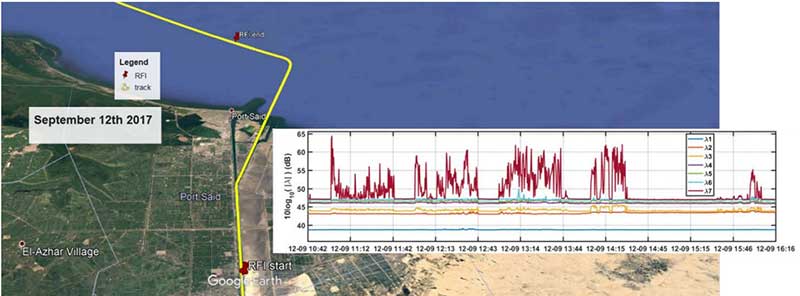
The first was detected when the vessel was transiting the Suez Canal northbound. The interference lasted around five hours and 60km. At several points the interference prevented the DLR semi-resilient GNSS receiver from working properly, which would mean that any single antenna GNSS receiver would cease to function completely.
Vessel going north in Suez Canal. RFI detectable during approx. 60 km. Inset: Eigenvalues during the 5 hours that the RFI was detectable. (Graphic: Emilio Pérez Marcos)
The second caused the DLR receiver to fail when the vessel was entering Jebel Ali, the port of Dubai in the United Arab Emirates. The DLR receiver provided some resilience thanks to its beamforming capabilities; again any other receiver would have suffered the interference effects earlier being unable to provide any PVT. The receiver did not return to proper operation for 11 days and 5,000km. The reason for this is uncertain and under investigation.
Particularly strong interference (45dB) caused the third incident and resulted in the DLR receiver failing for three days. It began when the ship was entered the highly trafficked Malacca Straits.
The equipment used also allowed researchers to determine direction of arrival for the interfering signals and to evaluate whether the interference was a spoofing signal.
For the reported strong interference events, DLR consulted the captain of the ship, who attested and confirmed the loss of PVT in the ship’s own GNSS receiver, with all the consequences that this implies for the systems that rely on it.
The paper, “Interference and Spoofing Detection for GNSS Maritime Applications,” was presented at the ION GNSS+ conference in Miami in September of 2018. It described the last phase of a yearlong measurement effort aboard the ship by DLR. An earlier phase of the campaign has also been published in E. P. Marcos et al., “Interference awareness and characterization for GNSS maritime applications,” 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, 2018.
The authors are preparing additional papers to describe more of the results from the larger project.
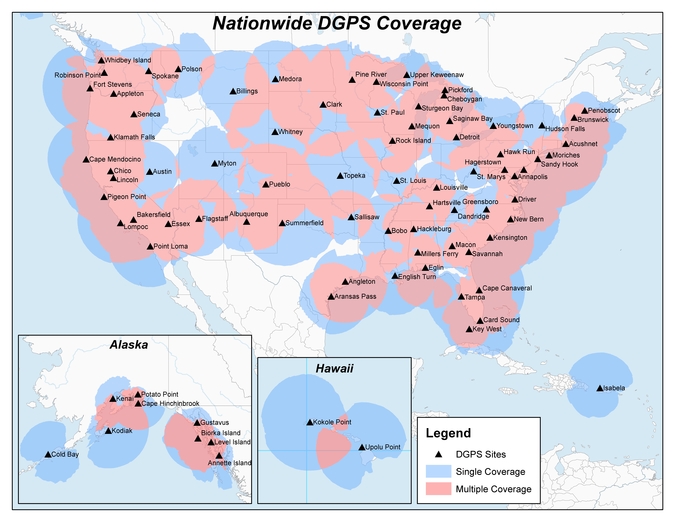
Twenty-two NDGPS sites that serve coastal areas would remain operational under the proposal.
An Aug. 18 Federal Register notice proposes shutting down the Nationwide Differential Global Positioning System (NDGPS) in January 2016 because of a decline in its use, except for sites in coastal areas.
The notice, issued by the U.S. Coast Guard (USCG), Transportation Department (DOT) and Corps of Engineers (USACE), reads:
The Nationwide Differential Global Positioning System (NDGPS) service augments GPS by providing increased accuracy and integrity using land-based reference stations to transmit correction messages over radiobeacon frequencies. The service was implemented through agreements between multiple federal agencies including the USCG, DOT, and Army Corps of Engineers, as well as several states and scientific organizations, all cooperating to provide the combined national DGPS utility.
However, a number of factors have contributed to declining use of NDGPS and, based on an assessment by the Department of Homeland Security, DOT and USACE. DHS, DOT and USACE are proposing to shut down and decommission 62 DGPS sites, which will leave 22 operational sites available to users in coastal areas.
A DGPS reference station antenna.
Contributing factors cited in the decision are:
USCG changes in policy to allow aids to navigation (ATON) to be positioned with a GPS receiver using Receiver Autonomous Integrity Monitoring (RAIM), which assesses the integrity of a GPS signal within the receiver;
increased use of Wide Area Augmentation System (WAAS) in commercial maritime applications, which uses ground-based reference stations and satellite communications to improve accuracy;
limited availability of consumer-grade NDGPS receivers;
no NDGPS mandatory carriage requirement on any vessel within U.S. territorial waters;
the DOT Federal Railroad Administration’s determination that NDGPS is not a requirement for the successful implementation of Positive Train Control (PTC), which provides the railway system the capability to positively enforce movement authorities along railroad systems.
In April 2013, announced that DHS and DOT were in the process of analyzing the need for NDGPS. “The response to the 2013 notice was limited, but the responses received were well informed on the NDGPS system, its use, and current and potential applications,” the notice reads. “While a limited number of responders found the broadcast of corrections to be beneficial, no respondents reported the discontinuance of DGPS broadcast to be detrimental or harmful. Ship pilots in particular noted that DGPS can be critical in confined waterways for precise ship-handling maneuvers.”
Public comments on the proposed shutdown and decommissioning of 62 DGPS sites are being accepted until Nov. 16. Termination of the NDGPS broadcast at these sites is planned to occur on Jan. 15, 2016.
Full details on how to submit public comments can be found on the Federal Register page.
EGNOS Service Provision Workshop 2015 will be held in Copenhagen September 29-30. The workshop is sponsored by the European Satellite Services Provider (ESSP).
The agenda, now available online, includes program and status updates on EGNOS on Day 1, as well as a focus on aviation. Included are an update on the EGNOS Safety-of-Life Service for aviation and several sessions focused on successful EGNOS implementation stories in aviation.
On Day 2, sessions include EGNOS market status and the adoption plan, EDAS for added value applications, E-GNSS benefits in the environmental domain, EGNOS in the maritime application domain and EGNOS in land application domain.
To learn more or to register, go to the ESSP website.
Septentrio has launched its next-generation dual-antenna GNSS receiver, the AsteRx 4 OEM. The AsteRx 4 OEM is a multi-frequency, dual antenna receiver that incorporates the latest innovative GNSS tracking and positioning algorithms from Septentrio. It offers users in the marine, machine control and agricultural industries precision, accuracy, reliability and ease of use, the company said.
Thanks to Septentrio’s positioning engine, which uses advanced multipath and ionosphere modeling algorithms, the AsteRx4 offers robust positioning scalable from meter to centimeter accuracy. Together with precise heading and reliable error estimates, the AsteRx 4 OEM functions in tough conditions on land, at sea or in the air.
Use of all available constellations (GPS, GLONASS, BeiDou, Galileo) provide the operator with a reliable solution even in obstructed areas such as in narrow city streets or at the corners of large structures, Septentrio said. The AsteRx4 OEM features the full range of positioning techniques from stand-alone to real-time kinematic (RTK).
For users who operate in more remote regions of the globe, the AsteRx4 OEM supports Veripos and Terrastar correction PPP services. Furthermore, the receiver features special interference mitigation technology which filters out ambient intentional and unintentional RF interference.
The AsteRx4 OEM is straightforward to set up and integrate with existing systems, Septentrio said. It has the similar hardware interface as earlier AsteRx receivers, and supports the same open and well documented command and binary output format. Users will be able to operate their receiver without special configuration software by using the very accessible web interface, which is available via network and USB connections.
“AsteRx4 incorporates many powerful improvements based on practical difficulties our customers face in the field every day,” said Jan Van Hees, vice president of Business Development, Septentrio. “We are particularly proud of the solutions for interference robustness that we have incorporated into our new ASIC, the GReCo4; the solid and reliable positioning algorithms that result from taking the receivers into the most extreme environments and from focusing not only on accuracy, but on reliability of the position solution.”
The AsteRx4, along with all the AsteRx family of receivers, will be on display at booth W40 for the duration of Ocean Business 2015 starting April 14 at the National Oceanography Centre, Southampton, UK.
Hemisphere GNSS is offering the Vector V104, a tiny high-accuracy, dual-receiver GPS compass and the latest addition to its precise heading and positioning product line.
“Our Vector V104 provides an astonishing level of accuracy in such a small form factor,” said Chuck Joseph, Hemisphere president and CEO. “The smart, compact design offers better than 2° heading accuracy and sub-meter DGPS position accuracy without requiring maintenance or calibration and while being immune to magnetic interference.”
Based on the company’s patented Crescent Vector technology, the Vector V104 integrates two GPS antennas, a multi-axis gyro, and a tilt sensor into a single, easy-to-use system. The dual-integrated antennas provide both heading and position data, and the gyro and tilt sensor improve system performance and provide backup heading information if the GPS-based heading is ever lost.
The Crescent technology provides highly accurate code phase management and outstanding multipath mitigation. This results in excellent accuracy and stability, enabling the user to install the V104 in areas where competing products have difficulty.
“As the world’s smallest GPS compass, the V104 will significantly change the onboard experience in navigation, making it more accurate, easier to install, and more cost efficient,” said Anders Bergström, founder and senior partner of True Heading AB, who sells a custom-branded V104 as the Vector Compact into the marine market.
An alternative to traditional gyro and fluxgate compass sensors, the Vector V104 offers a choice of either serial or NMEA2000 communications and is designed for a wide array of applications, especially in the marine, GIS mapping, and machine control markets.
iXBlue unveiled its Marins M series inertial navigation system (INS) at EURONAVAL 2014, held October 27-31 in Paris, France. The series includes the Marins M3, M5 and M7 systems and is designed to address the needs of the world’s most advanced navies for surface-vessel and submarine operations close to shore and in open-sea environments.
Accurate and reliable navigation, including missile alignment, is critical to the success of submarine and surface-vessel missions. The Marins M series raises the bar in performance and scalability by addressing the needs of surface ship navigation under a GPS-denied environment. For submarines, Marins M7 enables three times longer autonomous stealth navigation compared with any available system by offering drifts of less than 1 Nm/72 h.
The Marins M series represents the state of the art in strap-down, fiber-optic gyroscope (FOG) technology, and is combat-ready against GNSS denial, iXBlue said. The military-specification units output position, heading, roll, pitch, depth and velocities, and are perfectly silent. The systems are compatible with a wide range of aiding sensors and can be up and running within minutes.
The extended iXBlue product range, including Quadrans, Octans, Phins and Marins M series systems, now represents even higher scalability of solutions, from attack craft to aircraft carriers and submarines.
More than 30 navies worldwide have selected the iXBlue product range, including previous generations of Marins systems. For example, the UK Royal Navy has adopted advanced iXBlue solutions for its Astute Class submarines.
Hemisphere GNSS has announced two low profile, multipurpose antennas that it says will exceed expectations in all GNSS applications. With unique filtering patterns and precise attention paid to mitigation of multipath and interference, the A25 and A45 antennas complement all GNSS products, from L1 GPS to multi-frequency, multi-constellation.
The A25 and A45 have been designed to support millimeter accuracy for land and marine applications. Both antennas support present and future GNSS signals, including GPS, GLONASS, BeiDou, QZSS, and Galileo. The A25 supports the previously mentioned signals at a single-frequency level, while the A45 supports these signals at a multi-frequency level.
“We’ve designed these antennas to excel in challenging environments such as near buildings or under foliage,” said Lyle Geck, senior manager of product marketing at Hemisphere GNSS. “They have superior multipath mitigation, stable phase centers and strong SNR’s, even at low elevations.”
The ruggedized housing used by both antennas is made of an aluminum base that has been pretreated for the marine environment and will withstand salt, fog, and spray. The antennas pass the two-meter pole drop test.
The A25 is a multi-GNSS precision antenna, designed for a variety of applications including GIS, single-frequency RTK positioning and navigation, and precision guidance. The A45 is a survey-grade, multi-GNSS precision antenna for a variety of applications including surveying, RTK positioning and navigation, precision guidance, and machine control.
Satlab products include (from left) the SL600 6G GNSS receiver, the SL300 6G GNSS receiver, and the SL55 controller. Photo: Satlab Geosolutions AB
Swedish-based survey and GIS equipment maker Satlab Geosolutions AB has expanded into the U.S. and Americas with the creation of a new sister company Satlab Geosolutions (USA), Inc., based in Scottsdale, Arizona. Phil Gabriel has been named managing director of the USA office.
Setting up a formal base of operations in the U.S. will allow Satlab to better service their clients and expand their customer base in the U.S., Canada, Mexico and Latin America, a company release said. As past president of Hemisphere GNSS, Gabriel brings to the team his many years of experience in the survey, GIS, GNSS, machine control, marine and navigation industries, Satlab said.
The U.S. location will sell, support and service the new product lineup being introduced at InterGeo in Berlin, Germany, on October 7. Satlab is seeking dealers to expand its business throughout the Americas.
“The addition of a U.S. office is an exciting next step for us, after successful expansion into Turkey and the Czech Republic in the last few years,” said Bjorn Agardh, CEO of Satlab Geosolutions AB.
“Our products have been well received and continue to perform extremely well,” added Birol Gucluer, CTO and partner of Satlab.
“I’m excited to join Bjorn and Birol, extending their success by ensuring their high standards in customer service are maintained here in the Americas,” Gabriel said.
Satlab invites Survey and GIS dealers to meet the expanded team at InterGeo October 7-9 in Berlin, where they will be introducing several new models of their popular receivers and handhelds.
The STIM300 is a small, tactical-grade, low-weight, high-performance non-GPS aided IMU. It contains three highly accurate MEMS gyros, three high-stability accelerometers and three inclinometers. The IMU is factory calibrated and compensated over its temperature operating range.
The STIM series is designed for use below and on the ocean, on land, in the air, and in orbit and space. The STIM300 IMU is well suited for stabilization, guidance and navigation applications in the industrial, aerospace and defense markets. It is a crucial building block for inertial navigation systems in UAVs, AUVs, AGVs, UGVs and ROVs, Sensonor said.
The STIM300 is also used for camera turret stabilization and for use in various handheld devices that require a small IMU to secure operations during GPS outage.
Research and Markets has announced the addition of the “GNSS Market Outlook 2020” report to its offerings.
Research and Markets explained that GNSS has developed its applications across various industries worldwide. Some applications are simple, such as determining a position, whereas others are complex blends of GNSS with communications and other technologies. Over the past few years, the rapid growth in GNSS commercial applications has been observed by the firms building navigation satellites and equipment. According to the report, the GNSS market is expected to flourish with new technological applications and is anticipated to grow at a CAGR of 9.4 percent during 2014-2020.
The report “GNSS Market Outlook 2020” is an outcome of the research company’s exhaustive research and comprehensive analysis of the worldwide GNSS market. “Our report provides a complete overview of the GNSS market globally. Over and above, all the current trends and drivers coupled with the potential growth areas of the GNSS industry have been evaluated in the report,” the company said in a statement.
The report analyzes the GNSS market by its major application areas such as location-based services, transportation, surveying, and agriculture, over a period of eight years (2013-2020). In addition, the transportation section covers the GNSS market by road, rail, air, and marine navigation segments, which are creating a wide opportunity to the overall GNSS market, according to the report.
The report provides extensive analysis of the GNSS market by each of these segments up to 2020.
Topics Covered:
1. Analyst View
2. Research Methodology
3. Global Navigation Satellite Systems (GNSS) – Overview
Two satnav superpowers battled it out aboard a superyacht in the Mediterranean this summer, as a spoofing detector designed to differentiate between real and fake GPS signals came to grips with a spoofing device previously responsible for hijacking a sophisticated drone helicopter, deceiving it into landing when it was trying to hover, and for misdirecting the same luxury yacht in tests last summer.
Mark Psiaki, Cornell University professor of mechanical and aerospace engineering, and graduate student Brady O’Hanlon spent a week aboard the White Rose of Drachs, a luxury superyacht, testing their second-generation spoofing detector as the boat cruised from Monaco around the boot of Italy to Venice at the head of the Adriatic Sea. Also on board was a researcher from assistant professor Todd Humphreys’ Radionavigation Laboratory at the University of Texas at Austin. Humphreys tested his latest spoofer aboard the same yacht last year; this year, Psiaki and O’Hanlon embarked for a follow-up experiment to see if they could outsmart the spoofer.
The Cornell team’s spoofing detection system electronics quietly at work detecting evildoers on the bridge of the White Rose.
Both researchers have published earlier versions of their work in GPS World magazine, Psiaki in “GNSS Spoofing Detection,” the Innovation column in the June 2013 issue, and Humphreys in “Drone Hack” in the August 2012 issue.
The former story relates how Humphreys and Psiaki began their investigations as far back as 2008. “There was no intention to help bad actors deceive GNSS user equipment. Rather, our goal was to field a formidable ‘Red Team’ as part of a ‘Red Team/Blue Team’ (foe/friend) strategy for developing advanced ‘Blue Team’ spoofing defenses.”
In international waters this summer, the Cornell and Texas teams could conduct their research unhindered; on land, it’s very difficult to get permission to hack a GPS signal, even for research purposes, Psiaki said.
The Cornell two-antenna system installed on the roof of the White Rose bridge next to the superyacht’s GPS antenna.
Aboard the White Rose, Humphreys’ team initiated an attack of the boat’s GPS receiver, overlaying a disguised false signal on top of the real one, and attempting to send the boat off-course without generating any obvious warning signs. Stationed in a different area of the boat, Psiaki and O’Hanlon’s device set itself to detect the false signals through real-time analysis of their properties, and to provide protection against any attack by issuing a definitive warning whenever false signal characteristics were identified.
“We tested numerous spoofing scenarios,” recalled Psiaki. “We proved the efficacy of the new two-antenna version of one of our spoofing detection systems. It is the functional equivalent of our previous moving-antenna spoofing detection system. With two antennas we can simulate the effects of antenna motion without any need for moving parts. The only problems we encountered were with the initial spoofing drag-off, at which point the true and spoofed signals interfere with each other, and signal tracking can be tricky.
“We recorded wide-band data for all these cases. We think that we know how to enhance our defenses to hold on to the signals and recognizing spoofing during the initial drag-off. We also think that we know how to recover the true signals after an attack. The recorded wide-band data should enable us to develop and test these refinements in the lab, i.e., without the need to go back to sea — not that we would mind having to take another cruise on the White Rose of Drachs.”
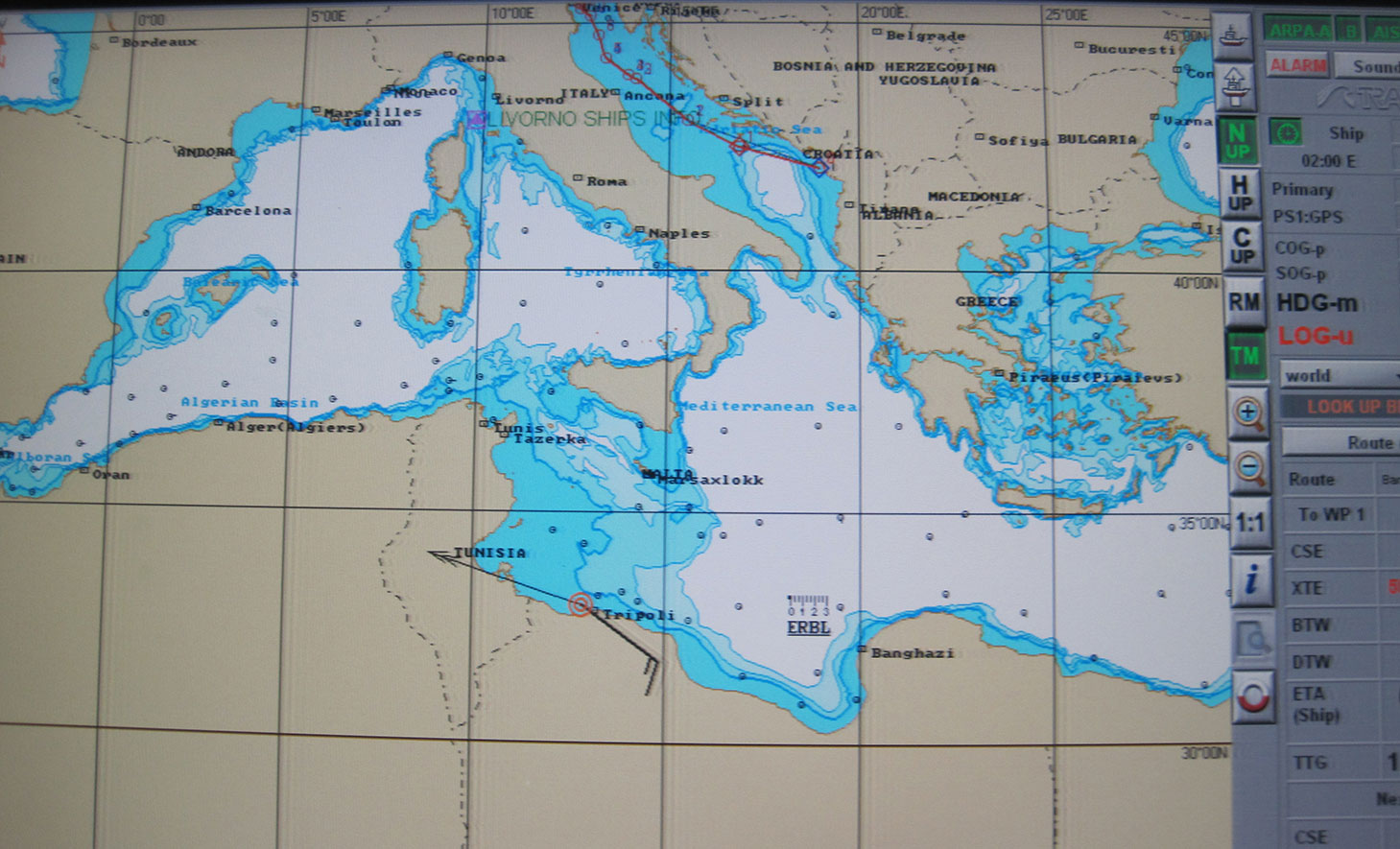
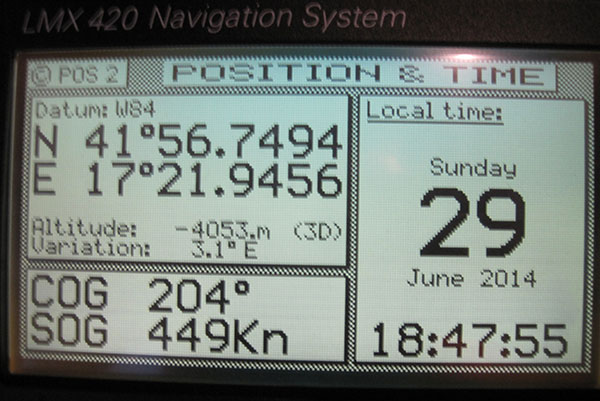
In one test, the yacht’s GPS receiver was spoofed into believing that it was veering off its course, set northwards to Venice, and heading south to Libya at a very high speed. The Cornell detector was able to warn the White Rose’s bridge crew about the attack before the yacht was 20 meters off course.
The White Rose’s GPS-driven chart showing it off the coast of Libya (black line) when it was actually in the Adriatic, cruising from Montenegro to Venice (blue line). The spoofing detector knew all along that this was a false reading.“This photo shows the White Rose’ Litton GPS receiver with ridiculous speed and altitude readings — we were in a hurry to get from the Adriatic to Libya and therefore spoofed a straight line route that took us across, actually beneath, Italy and Sicily, at speeds exceeding 900 kts in order to get there in 50 minutes. “
“We want to progress to the point where not only can we tell it’s a false signal, but we can also say, ‘Here is the true signal; here is the true position,’” Psiaki added.
The owner of the White Rose of Drachs, an anonymous businessman, allows the boat to be used for scientific purposes during off seasons.
The Cornell and White Rose team: (from left) Brady O’Hanlon, Cornell ECE Ph.D. student, Andrew Schofield, master of the White Rose of Drachs, and Mark Psiaki, Cornell Prof. of Mechanical & Aerospace Engineering.
Psiaki will present a paper on the superyacht experiments at the Institute of Navigation’s GNSS+ conference in September in Tampa, Florida, and GPS World will publish an article based on this paper in the November issue.
This story draws on initial reporting by Anne Ju in the July 28 Cornell Chronicle, with additional material and photos supplied by Mark Psiaki.