Focusing on timing synchronization, the project is supported by ESA NAVISP on behalf of the Swedish National Space Agency to advance resilient timing and positioning.
Net Insight has been awarded a development project through the European Space Agency’s Navigation Innovation and Support Program (NAVISP), a European program designed to foster innovation in the PNT domain and strengthen Europe’s technological competitiveness.
The project, co-funded by the Swedish National Space Agency, aims to accelerate the development of robust positioning, navigation and timing (PNT) technology, to address growing societal needs and increase risks to critical infrastructure.
Precise timing signals are a critical component of everything from telecommunications and 5G networks to transportation and energy systems. Traditionally, GNSS systems such as GPS and Galileo have been the standard for time synchronization. However, today’s geopolitical landscape and the increasing prevalence of disruptions such as jamming and spoofing highlight the need for robust, complementary solutions that can ensure reliable operation under all conditions, according to Net Insight.
“This initiative exemplifies how the Swedish space industry can contribute to addressing complex European challenges related to critical infrastructure,” said Christer Nilsson, vice director general of the Swedish National Space Agency. “Combining Swedish technical excellence with European collaboration is a powerful model for strengthening robustness and operational reliability within PNT.”
“Society depends on technologies that are not only advanced, but also robust and operationally reliable, and capable of withstanding disruptions and external interference,” said Per Lindgren, group CTO and head of synchronization at Net Insight. “With this project, we are strengthening the development of solutions that can deliver reliable time synchronization even under demanding conditions, thereby securing critical infrastructure for the future.”
Through collaboration with the Swedish National Space Agency and ESA’s NAVISP program, the project gains access to both national and European funding and support for research and development in PNT technology. At the same time, it enables national initiatives to be aligned with broader European strategies for robust and operationally reliable PNT architectures.
NAVISP is designed to stimulate new technologies and applications beyond traditional GNSS-based systems and plays a key role in Europe’s efforts to ensure robust and competitive PNT solutions.
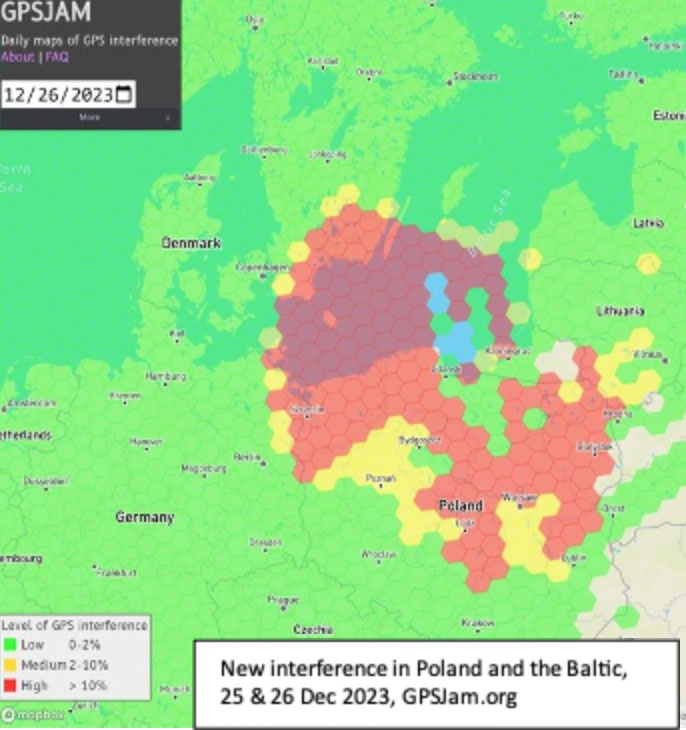
Parts of Poland, Lithuania, southern Sweden, and other countries in the Baltic region had an unexpected Christmas present this year. GPS signals were disrupted and not available in many areas on the 25th and 26th of December. Poland seemed to be particularly impacted, with the northern two-thirds of the country affected and many users on the ground and in the air having to make do without reliable service.
On New Year’s Eve, parts of Finland experienced significant jamming as well. The most visible impacts of the holiday events were seen in aviation and low navigation integrity reports from ADS-B systems. These were displayed on the GPSJam.org website.
Experts in the United States and Poland point to Russia as the source of the interference. They say that Russian anger over the activation of a U.S. anti-missile system in northern Poland in mid-December, and Sweden’s progress toward NATO membership with a recent positive vote in the Turkish Parliament were likely motivations.
Such a reaction by Russia is not unprecedented. In 2022 President Putin threatened Finland and Sweden with invasion if they sought to join NATO. Subsequently, Finnish President Niinistö met with President Biden to discuss improving defense ties. Shortly thereafter planes flying over Kaliningrad and nearby areas in the Baltic began reporting GPS jamming. Analyses of the event by graduate students at the University of Texas Radionavigation Laboratory and Stanford University have provided some details and will likely reveal more as time goes by.
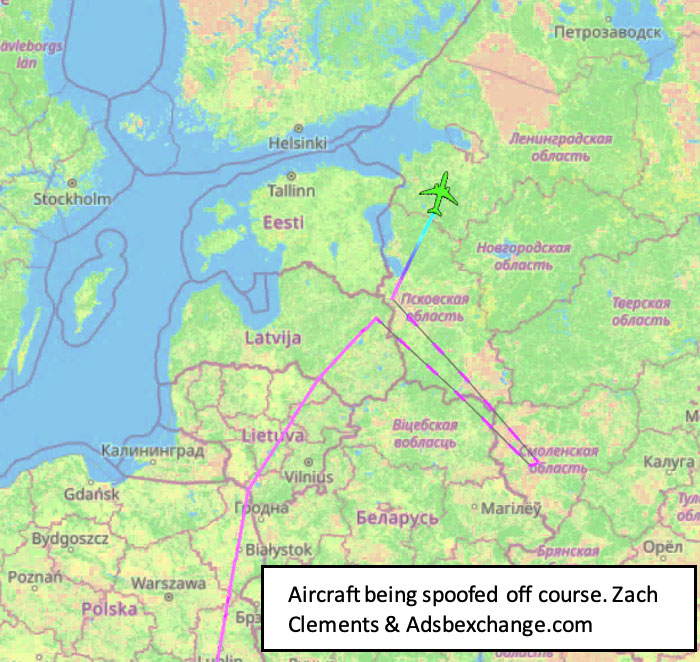
Zach Clements at U.T. studied the disruption and discovered that it included several transmitters spread across a wide area. Some were simply jamming GPS signals to deny service. At least one transmitter was spoofing aircraft so their instruments would show them far from their actual location.
While the phenomenon known as “circle spoofing” has been frequently observed with ships, this was the first time it was reported in aviation. With circle spoofing a receiver is electronically captured and “moved” to a different location. Then it is made to appear to move in circles, almost always in a clockwise direction
Image: Zach Clements/ GPSJam.org
Clements is reasonably sure the source of the circle spoofing was inside Russia. “The points at which the aircraft began to be impacted by the spoofing and where they regained authentic GPS indicate that the spoofer is somewhere in Western Russia. Interestingly, the location to which the aircraft were spoofed is a field about a kilometer from Russia’s decommissioned Smolensk military airbase.”
Zixi Liu at Stanford has discovered that the interference was actually two separate events. The first lasted from 9:30 PM on the 24th until 4:30 AM on the 25th, with the second beginning around 2:30 PM on the 25th and tapering off around midnight on the 26th.
Aviation interests have become increasingly concerned about interference with GPS signals since 2019 when a commercial passenger aircraft flying through smoke nearly impacted a mountain. Since then, aviation groups have raised the issue, national authorities have been regularly issuing warnings, and the UN’s International Civil Aviation Organization has urged its member nations to take action to prevent interference.
“Aviation is always at greater risk when GPS signals are not available or are compromised in some way,” according to Joe Burns, a senior captain at a major international air carrier. Burns is also a member of a board that advises the U.S. government on GPS and related issues. “Interference with GPS increases the risks of accidents and almost always slows the system down, makes flights longer, and more expensive,” he said.
The International Air Transport Association is meeting this month to discuss GPS interference. Most agree, though, that most meaningful short-term solutions will depend upon the cooperation of national governments across the globe.
Four T300’s from ComNav Technology have been used as active control GNSS points on the top of Sweden’s tallest building, Karlatornet, during its construction to deliver 3D coordinates to total stations and one was used as a base station. The building is set to be complete this month.
The T300 is a receiver with radio frequency, a baseband chip built in, and a unique quantum-real-time kinematic (RTK) algorithm. It supports full constellation systems including BDS-2, BDS-3, GPS, GLONASS, Galileo, QZSS and NavIC.
The receiver is designed for demanding surveying tasks, features tilt compensation, 4G/Wi-Fi connection, 8-GB internal memory and an easy survey workflow with Android-based Survey Master Software. It is designed to make collecting accurate data easy and fast, whether done by a beginner or experienced professional surveyor, the company said.
The European Space Agency (ESA), in collaboration with the Joint Research Centre of the European Commission, are hosting this year’s ESA/JRC International Summer School on GNSS with the Swedish Space Agency in July in Kiruna, Sweden. The course will include an overview of satellite navigation from the theoretical basis of GNSS, their signals, and processing by receivers and more.
Elements of this year’s program will include details of low-Earth-orbit positioning, navigation and timing, navigation on the Moon, and Galileo’s Open Service Navigation Message Authentication. Exercises will include receiving signals from Galileo and other GNSS.
Participants will also learn about business aspects, intellectual property rights, and the future of satellite navigation systems, including Galileo second-generation.
Some of the world’s leading satnav and space experts will be giving lectures. Lecturers include Paul Verhoef, former director of navigation for ESA, and Jean-Jacques Dordain, former director general. The course will be opened by Anna Rathsman, Director General of the Swedish National Space Agency; Javier Benedicto, Director of Navigation at the European Space Agency; and Georgios Giannopoulos, head of the Technologies for Space, Security and Connectivity Unit at the Joint Research Centre of the European Commission.
The course is limited to 50 participants on a first-come, first-served basis and is open to graduate students, Ph.D. and postdoctoral researchers, as well as young engineers and academics working within industry or agencies, aged 38 or younger.
The summer school will take place July 17-28 in Kiruna, Sweden. Register before April 14 for a reduced early fee. For more information and to register, click here.
Saab, the Swedish defense and security company, and Maxar recently demonstrated a solution to GNSS-denied navigation by integrating Maxar’s 3D Data and Precision 3D Registration (P3DR) technology into the fighter jet software for the Swedish Gripen E fighter jet.
Saab develops and manufactures the fighter jet for Sweden and other countries.
A camera on the jet captures a livestream of its flight path. Maxar’s P3DR compares that incoming livestream to the Maxar 3D Surface Model of the area stored on the jet. By matching scenes in the livestream to the 3D data in real time, P3DR can determine the jet’s precise location, enabling the pilot to navigate and carry out the mission without GPS.
Maxar 3D Surface Model, immersive 3D data with superior accuracy and global coverage, offers a highly accurate representation of Earth. The data is produced with unique automated technology, delivered rapidly and with high precision. It is based on Maxar’s high-resolution, unclassified commercial satellite imagery, without the need for ground control points. Maxar’s 3D Surface Model product is a key input to the company’s Globe in 3D, a worldwide foundation of 3D data with resolution of 50 cm or better and 3 m accuracy in all dimensions.
The chart across the top of the video indicates the accuracy of the P3DR matching of the livestream video to the Maxar 3D Surface Model. When the camera encounters clouds, it lowers the accuracy of P3DR’s match; however, as long as there is some view of the ground, the accuracy is relatively high.
Maxar’s P3DR is a standalone software solution that automatically geo-registers imagery from any source to Maxar 3D reference data. This real-time capability enables navigation in a GPS-denied environment, safeguarding against signal jammers in an anti-access area denial (A2AD) environment.
Saab put the GPS-denied navigation technique to the test with a Gripen flight demonstration over Sweden. The GIF below demonstrates how P3DR closely overlays the livestream image on the Maxar 3D Surface Model, allowing the pilot to understand where they are on the map.
During the flight demonstration, the Gripen’s GPS receiver was on to monitor the accuracy of the results. The GPS receiver verified that the demonstration’s results were accurate.
The Gripen E jet fighter built by Saab. (Photo: Saab)
WTS Positioning Solutions, a Swedish GPS tracking company, has released its next generation of smart GPS trackers: the Trax G+ series.
At the top of the range is Trax G+ 4G LTE-M, one of the first LTE trackers commercially available on the market, the company said. It supports 4G LTE-M and NB-IoT standards, with both European and U.S. models available.
WTS has also released two new, improved GPS models using 3G and 2G standards, to complete the new Trax G+ range.
Trax G+ tracker. Trax G+ is a small GPS tracker for personal use. It has real-time tracking capability with update rates of up to every 10 seconds. For customised industrial applications, the new Trax G+ can support up to two updates per second. It also comes with wireless charging and IP68 water resistance.
The Trax G+ App, available in the App Store and Google Play, has a wide range of features including Unlimited Geofences, Augmented Reality Tracking, Speed Alerts, Location History, the possibility to track multiple devices and device sharing.
WTS works closely with brands across several consumer markets, including sports gear, event management, security, search and rescue, homecare and telecommunications.
Photo: WTS Positioning Solutions
Tracking vest. A special collaboration with POC sports brand, manufacturer of helmets, body armour and sports apparel, resulted in an ISPO Gold Winner award for the POCito VPD Air Vest + TRAX POC edition.
The vest provides a child with back protection for winter sports and is designed to store a TRAX POC Edition device. It is an integrated protection, alert and tracking system that allows parents to monitor and keep children safe on the slopes.
POC will present the vest at ISPO Munich, held Fe.b 3-6, in Hall B6, Booth 414.
Trax G+ data plans are offered in 6-, 12- and 24-month pre-paid packages and offer international coverage and free roaming in all supported countries.
WTS Positioning Solutions are specialists within the GNSS industry, supplying personal GPS trackers, plus customised hardware, software, server and data solutions for high-precision real-time location and tracking information.
Volvo Cars has a complete system solution that makes it possible to integrate self-driving cars into real traffic, with ordinary people in the driver’s seat. The automaker presented its planned system in an online press conference Feb. 19.
“We are entering uncharted territory in the field of autonomous driving,” said Peter Mertens, senior vice president of Research and Development, Volvo Car Group. “Taking the exciting step to a public pilot, with the ambition to enable ordinary people to sit behind the wheel in normal traffic on public roads, has never been done before.”
As the Drive Me project enters its second year, Volvo is moving toward its goal of placing 100 self-driving cars in the hands of customers on selected roads around Gothenburg by 2017. The public pilot — a collaboration between legislators, transport authorities, a major city and a vehicle manufacturer — is a central component of Volvo’s plan to achieve sustainable mobility and ensure a crash-free future.
Early prototype cars are now being tested on the DriveMe route in and around Gothenburg, Sweden.
Volvo’s production-viable autonomous driving system is based on a complex network of sensors, cloud-based positioning systems and intelligent braking and steering technologies.
“Autonomous driving will fundamentally change the way we look at driving. In the future, you will be able to choose between autonomous and active driving,” Mertens said. “This transforms everyday commuting from lost time to quality time, opening up new opportunities for work and pleasure.”
Volvo’s autopilot system is designed to be reliable enough to allow the car to take over every aspect of driving in autonomous mode, Volvo said. The technology advances a crucial step beyond the automotive systems demonstrated so far since it includes fault-tolerant systems, the carmaker said.
“It is relatively easy to build and demonstrate a self-driving concept vehicle, but if you want to create an impact in the real world, you have to design and produce a complete system that will be safe, robust and affordable for ordinary customers,” said Erik Coelingh, technical specialist at Volvo Cars.
The main challenge is to design an autopilot that is robust for traffic scenarios as well as for technical faults that may occur. The driver can’t be expected to suddenly intervene in a critical situation. Initially, the cars will drive autonomously on selected roads with suitable conditions, such as without oncoming traffic, cyclists or pedestrians.
Volvo’s system generates exact positioning and a complete 360° view of the car’s surroundings through a combination of radars, cameras and laser sensors. A network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
“Making this complex system 99 percent reliable is not good enough. You need to get much closer to 100 percent before you can let self-driving cars mix with other road users in real-life traffic,” Coelingh said. “Here, we have a similar approach to that of the aircraft industry. Our fail-operational architecture includes backup systems that will ensure that the autopilot will continue to function safely if an element of the system were to become disabled.”
For example, the probability of a brake system failure is very small, but a self-driving vehicle needs a second independent system to brake the vehicle to a stop, because it is unlikely that the driver will be prepared to press the brake pedal.
On the road, the complete technology solution is designed to handle even the most complicated scenarios, from smooth commuting to heavy traffic and emergency situations, Volvo said. “Just as good drivers would, potentially critical situations are approached with sensible caution. In a real emergency, however, the car reacts faster than most humans,” Coelingh said.
When autonomous driving is no longer available — because of weather, technical malfunction or the end of the route has been reached — the driver is prompted by the system to take over again. If the driver is incapacitated for any reason and does not take over in time, the car will bring itself to a safe place to stop.
Volvo expects that autonomous driving could cut fuel consumption, improve traffic flow, and open up possibilities for urban planning and more cost-efficient investments in infrastructure.
“Developing a complete technological solution for self-driving cars is a major step. Once the public pilot is up and running, it will provide us with valuable knowledge about implementing self-driving cars in the traffic environment, and help us explore how they can contribute to sustainable mobility,” Coelingh said. “Our smart vehicles are a key part of the solution, but a broad societal approach is vital to offer sustainable personal mobility in the future. This unique cross-functional cooperation is the key to a successful implementation of self-driving vehicles.”
Drive Me system components:
The 76-GHz frequency-modulated, continuous wave radar is placed in the windscreen and combined with a camera to detect objects on the road. Four radars behind the front and rear bumpers locate objects in all directions. Long-range radars in the rear ensure a good rearward detection of vehicles in parallel lanes.
Sensor technologies. Volvo Cars is developing a holistic solution that generates exact positioning and a complete 360-degree view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors. A redundant network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
Precise positioning is based on this surround information together with GPS and a high-definition 3D digital map that is continuously updated with real-time data. The system is reliable enough to work without requiring driver supervision.
Combined radar and camera. The combined 76-GHz frequency-modulated continuous wave radar and camera placed in the windscreen is the same as that in the new XC90. This system reads traffic signs and the road’s curvature and can detect objects on the road such as other road users.
Surround radars. Four radars behind the front and rear bumpers (one on each corner of the car) are able to locate objects in all directions. By sweeping both left and right, transmitting waves that bounce off signs, poles, and tunnels, they monitor a full 360-degree around the car.
360-degree surround vision. Four cameras monitor objects in close proximity to the vehicle. Two are under the outer rear-view mirrors, one is in the rear bumper and one is in the grille. Besides detecting objects at close range, these cameras monitor lane markings. The cameras have a high dynamic range and can handle quick changes in lightning conditions, such as when entering a tunnel.
Multiple beam laser scanner. This sensor system is placed in the front of the vehicle, below the air intake. The scanner can identify objects in front of the car and ensures very high angle resolution. It can also distinguish between objects. The laser sensor has a range of 150 meters for vehicles and covers a 140-degree field of view.
Trifocal camera. A trifocal camera placed behind the upper part of the windscreen is three cameras in one, providing a broad 140-degree view, a 45-degree view and a long-range, yet narrow, 34-degree view for improved depth perception and distant-object detection. The camera can spot suddenly appearing pedestrians and other unexpected road hazards.
Long-range radars. Two long-range radars placed in the rear bumper of the car ensure a good rearward field of view. This technology is useful when changing lanes because it can detect fast-moving vehicles approaching from far behind.
Ultrasonic sensors. Twelve ultrasonic sensors around the car are used to identify objects close to the vehicle and support autonomous driving at low speeds. The sensors are based on the technology used for current park-assist functions enhanced with advanced signal processing. This technology is useful for detecting unexpected situations, such as pedestrians or hazards on the road close to the car.
High-definition 3D digital map. A high-definition 3D digital map provide the vehicle with information about the surroundings, such as altitude, road curvature, number of lanes, geometry of tunnels, guard rails, signs, and exits. The position geometry is in many cases at centimeter level.
High-performance positioning. The high-performance GPS is one part of the positioning control that is enhanced by a combination of an advanced GPS, a three-degrees-of-freedom accelerometer and a three-degrees-of-freedom gyro. By matching the 360-degree image created by the multitude of sensors with the map image, the car will get the information about its position in relation to the surroundings.
By combining the information from the sensors and the map, the Drive Me car is able to choose the best course in real time, factoring in variables such as the curvature of the road, speed limit, temporary signs and other traffic.
Cloud services. The cloud service is connected to the traffic authorities’ control center. This ensures that the most up-to-date traffic information is always available. Control center operators also have the ability to tell the drivers to turn off the autonomous drive mode if necessary.