It has been a wild decade, with so many players in the autonomous vehicle (AV) market, all striving for a leg up. Until the dominant design of present AV stacks emerged, there was no small amount of experimentation and less-than-successful alternate approaches. For instance, there was one big-name player that initially sought to create an AV solution without GNSS. Reality set in, and they soon embraced GNSS as an essential component.
Gordon Heidinger, segment manager, automotive and safety critical systems at Hexagon’s Autonomy and Positioning division, has had a front-row seat from which to observe, and contribute to the evolution of AV.
“I’ve been in the automotive industry for 20 years, all the way from OEMs like Chrysler to tier ones like Harman,” Heidinger said. “I’ve worked on the engineering side, on the project management side, and have now joined Hexagon | NovAtel to help further their involvement in the automotive industry. NovAtel was there for aviation 20 years ago, helping develop systems for planes to take off and land autonomously — we have a deep bench when it comes to applying such expertise for vehicular autonomy.”
NovAtel has long provided GNSS and IMU products and solutions, as well as real-time positioning services. Each are key elements of AV sensor stacks and overall autonomy solutions. Parent company Hexagon has multiple divisions contributing to intelligent transportation — on both the front end and back end.
The Front End
AV systems require highly reliable and smart sensor stacks that typically include cameras, radar, lidar and sonic sensors; these provide the relative positioning for advanced driver assistance systems (ADAS), which are becoming commonplace for newer vehicles. There are also implementations that include GNSS/IMU for navigation and lane keeping.
“Lane keeping is possible to a limited degree with combinations of the other sensors; however, you need GNSS to let you know where you truly are for autonomous driving,” Heidinger said. “Are you on the right freeway lane in Ottawa, or is this an exit ramp? This was a big problem with today’s simple single frequency solution; a car can assume highway speeds on an exit ramp, not realizing it was an exit ramp.”
Only with the absolute precise positioning that GNSS provides, and a high-definition map, level 4 autonomy — and potentially level 5 someday — could be achieved. With current sensor stacks, when the car is moving, it can reliably detect the other cars moving in its vicinity. Furthermore, vehicle-to-vehicle (V2V) solutions are being developed and tested, which enable a vehicle to share data about where it is going, its speed and acceleration, and its current location. We may remain far from full autonomy until such solutions are broadly deployed, however we will see some of the vehicle-to-everything (V2X) solutions sooner than later.
Various developers and departments of transportation around the world are testing short range V2X communication systems.
“We would need real-time construction zone updates,” Heidinger said. “It would be tough to do lane keeping if a construction site closes or diverts lanes during the course of a day. Or if cameras detect crashes, or blocked lanes, this will need to be broadcast immediately and continuously in real-time.”
A representative example of a production high precision positioning system was demonstrated at the recent Consumer Electronics Show 2023 (CES 2023). ZF Friedrichshafen AG (ZF) has developed ProConnect — a dedicated short-range communication (DSRC) solution that enables positioning and communication for use in applications with roadside infrastructure, such as traffic lights. It can be scaled to include other over-the-air alerts that could include first responder vehicle proximity and construction site status. At CES, the GNSS positioning was demonstrated with an autonomous vehicle platform from Hexagon.
“The precise map and the real-time updates from V2V and V2X systems all need precise absolute positions to relate objects to each other,” Heidinger stated. The question then becomes “…how reliable and trustworthy is that solution”?
There are international automotive-grade requirements such as the ISO 26262 standard for electrical/electronic systems, and automotive safety integrity levels. For instance, ASIL-B(D), and cybersecurity standard ISO/SAE 21434. The latter provides protection against external access without authorization.
“The level of reliability required is extremely high,” Heidinger said. “After all, these are human lives, in metal boxes hurtling along at highways speeds. There are ASIL standards that call for a probability of 10-8, or 1 in 100 million, in an hour that the system is wrong. These levels of reliability need to apply to electronic components, communications, and the availability of the GNSS positioning solution to really automate any type of vehicles. You’ll encounter similar AV standard references to five-nines, or 99.999%.”
Positioning Services
Heidinger explained that for most aspects of autonomy, GNSS can be “good enough”, even just to a foot. However, uncorrected, GNSS can never meet even those needs — achieving an accuracy of a few meters at best. Then there is the matter of reliability. Augmentations like real-time kinematics (RTK) and precise point positioning (PPP) apply broadcast “correctors” that can yield centimeter positions. RTK is not practical for broad areas or highway and road networks as it requires dense infrastructure and two-way communication with the vehicle, which can introduce security challenges.
Solutions for autonomy are typically PPP. While there are many applications of PPP that use clock, orbit and ionospheric model data broadcast from geostationary L-band satellites, for applications such as surveying, mapping, maritime and agriculture, this would not meet the reliability requirements for AV. The Achilles heel of broadcast PPP is that the satellites are usually limited in number and positioned over the equator; the vehicle can often lose sight of these. Instead, PPP services, such as that provided by NovAtel and others, are tapped by vehicles via mobile internet connections; this means cellular networks. While cellular services can often meet reliability goals, there are still vast areas of highways where availability is sparse.
The other challenge for PPP is the convergence time needed to get reliable sub-foot precision.
“No one wants to wait five minutes or more for it to converge,” Heidinger said. “By processing data from semi-dense networks of reference receivers, our PPP can converge rapidly enough to be ready to roll as soon as you start driving.”
The Back End
A free-for-all of autonomy is not going to happen on highways and roads that are not precisely mapped and kept up to date.
“There are visions of crowd sourcing map updates from the sensors in cars,” Heidinger said.
Crowd-sourced data is not systematic enough, though, and could be inconsistent. After all, there are privacy considerations, and how many vehicle owners would be willing enough to participate?
There are numerous mapping and imaging “buggies” plying road and highway networks on an ongoing basis; this could provide a base layer. But how precise? The specific applications these mapping buggies support may not need high precision. And operators may not be willing to invest in high precision/accuracy. The precision of the 3D maps would need to be higher than the target range of the AV systems. The technology exists and is broadly used for various applications in the form of centimeter precision 3D mobile mapping — at highway speeds. Such systems with lidar scanners, cameras, and positioning solutions can include GNSS, IMU, wheel speed encoders, and SLAM lidar for enhanced position stabilization. An example is the Pegasus TRK from Hexagon | Leica Geosystems.
GNSS is the key component — the provider of precise absolute positioning. When people drive, they are the sensor stack, and they are (mostly) aware of the context of where they are and can see and hear what is going on around them. Before we can hand over the driving duties to machines, and fully accept any autonomous driving technology, it will not only need to be as smart and aware as humans, but much better and more aware than humans. Autonomy sensor stacks can tell a car what it is doing, and what other things are doing in its immediate vicinity, but without a precise map, and knowing precisely where it is in real-time, a car would be still tip-toeing around in a fog of uncertainty.
Autonomous vehicles are being tested both on open roads and in controlled environments. (Photo: Trimble)
The advent of autonomous vehicles (AVs) is one of three revolutions in the automotive industry that will likely change this country as much as cars did over the last century. The other two are the conversion from internal combustion engines to electric ones and the integration of cars into digital traffic networks.
Once mass deployed, AVs promise to dramatically reduce the number of traffic fatalities (42,000 in the United States in 2020, a National Safety Council report shows). They will never be sleepy, distracted, aggressive or drunk — nor will they engage in such inane human driving behaviors as texting while driving, playing chicken with bicyclists, or running red lights. They also promise to reduce fuel consumption, harmful emissions and traffic congestion by optimizing routes and increasing the number of people using car services instead of owning their own car.
To realize this vision, however, cars will have to do a lot more than just find their way on their own. They will have to perform flawlessly in an unpredictable world that includes toddlers, reckless drivers, fallen trees, sinkholes, construction and accidents.
Among the many sensors aboard an AV, the GNSS receiver has a unique role. It is the only one that can provide absolute positioning, in the form of latitude and longitude coordinates, to within a couple of decimeters anywhere on Earth. As such, it is “a key enabler to a lot of the vehicles to know precisely where they are and whether it is safe to activate autonomous systems,” says Gordon Heidinger, automotive segment manager, Autonomy and Positioning division at Hexagon.
A GNSS receiver cannot achieve the level of accuracy required for autonomous driving without robust corrections. Fifteen years ago, the state of the art was real-time kinematic (RTK) corrections. However, “the cost of that equipment exceeded the cost of a small car at that time,” recalled Steve Ruff, general manager, On-Road Autonomy Division at Trimble. “They were targeting a system cost of about $200. Today, that number is below $50, including the antenna, the GNSS positioning engine, and the software that runs on it.”
Today, all automotive manufacturers are using a form of precise point positioning (PPP) corrections, which is a one-way broadcast, as opposed to the two-way communication between a base station and a rover required for RTK. This means that a single correction stream can serve an entire continent, Ruff pointed out. “Once a vehicle is manufactured, we will support it with our PPP corrections stream for at least 10 years, which is the typical service life of a vehicle.”
Obstacles to Adoption
To achieve mass-market adoption, AVs will have to overcome numerous and complex obstacles:
The technical difficulty of dealing with a limitless number of unanticipated challenges, such as poor visibility because of weather conditions, unpredictable human behaviors, complicated obstructions, detours and potholes
The need to map millions of miles of roads, develop vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, and protect vehicle software from hackers
The difficulty, if not the impossibility, of handing off control to a human quickly enough to be safe when the system is unable to deal with a complex situation
Questions about legal responsibility and insurance liability
Ethical dilemmas about how to program the system to respond in emergencies
The development of appropriate federal and state regulations
Resistance from paid drivers who fear losing their jobs, including 3 million U.S. truckers, and from many other drivers, who fear losing control over their safety.
Trimble has approached all the major car manufacturers, has several programs in development, and has received multiple positioning requests for information (RFIs), Ruff said. “In 2018, Trimble’s RTX corrections service was the first solution adopted for production use in passenger vehicles, providing absolute precise positioning for General Motors’ Super Cruise system.”
Additionally, Trimble is working with Qualcomm and with SiriusXM, which will deliver Trimble’s RTX corrections over its satellite network, just like it does with music. “It is a good partnership because about 80% of the vehicles in North America are coming equipped with SiriusXM radio technology,” Ruff said. “The OEMs do not have to buy any additional hardware.” RTX corrections can also enter a vehicle via cellular IP, L-band satellite broadcasts and, potentially, over a V2I link.
Hexagon has proposed a PPP solution for automotive, “mainly because we essentially have the world covered with base stations, and that is a hard thing to do,” Heidinger said. “We have been running a corrections network for a very long time.” PPP’s one-way broadcast offers better cybersecurity because the GNSS receiver does not have to disclose its position, he added.
Swift Navigation is building a global corrections network. To make it suitable for the automotive market, the company is aiming to make its corrections service affordable and scalable. “We realized quickly that neither of the traditional RTK and PPP approaches were going to meet those requirements,” said Fergus Noble, company co-founder and CTO, “so we invested in developing a corrections service pretty much from the ground up.”
RTK provides high accuracy and short convergence times but is typically costly to deploy because it requires a very high density of stations, Fergus explained. As a consequence, most providers do not have continuous coverage over a wide area. Conversely, while PPP is a true global solution, it is less accurate and takes a long time to converge. “That may be fine in a marine or land-surveying application, but not if you are driving through city tunnels and bridges and need it to be able to reacquire a high-accuracy position within a matter of seconds. Therefore, we took a hybrid approach, together with a lot of new IP that we developed.” The service provides coverage in all the United States and most of Europe, and is being tested in Japan, South Korea and Australia.
Accuracy and Integrity
A common target accuracy for lane-level positioning is 20 cm 95% of the time. That means that AVs need to know when their positioning accuracy falls beneath that threshold. “We are building into our positioning solutions an accuracy metric that is output along with the position information we are providing,” Ruff said. “[The metric] can be used by the intelligence in the system to decide whether it can rely on the GNSS solution or needs to switch to one of the other complementary technologies because GNSS accuracy is not fulfilling its lane discipline.”
Heidinger noted the importance of economies of scale when mass-producing vehicles, where cost and ease of manufacturing become factors. “We can take some of our high-end equipment and get you 2 cm of accuracy with this technology, but the price point and the feasibility of this going into mass production for automotive is not favorable,” he said. “So, we’ve taken the approach of providing a software positioning engine that can be fit onto any hardware.”
Hexagon is developing products in partnership with STMicroelectronics, using the company’s Teseo V family of measurement engines. “ST is one of the established leaders of automotive GNSS solutions,” Heidinger said. “We take their measurements and put our positioning and corrections solution behind that to give positioning with lane-level accuracy.”
Noble agrees on the importance of knowing the reliability of a vehicle’s GNSS-based lane accuracy. The prevailing approach, which fuses data from GNSS and other sensors, makes it acceptable for one data source to be temporarily unavailable if the system is aware of that outage, he said. “That is where you start to see Swift, and others as well, focusing on the notion of integrity.”
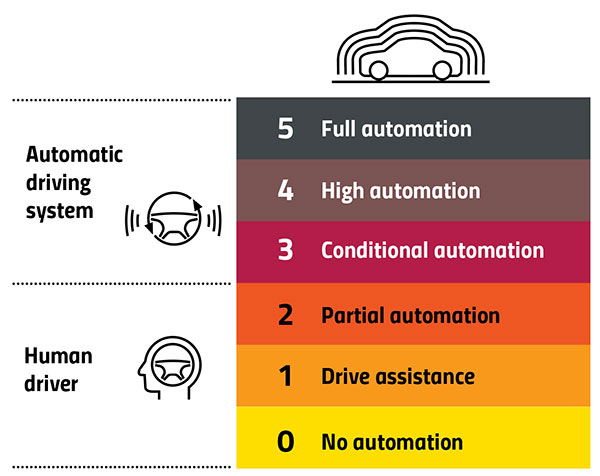
An AV’s level of autonomy determines its behavior during GNSS outages. For systems with Level 2 autonomy and below, the driver must remain engaged, while Level 2+ and Level 3 systems will alert the driver to retake control when needed. If a driver of a Level 2+ or higher system fails to reengage, the AV’s reaction depends on the system and manufacturer.
“When we start to see Level 3 or above self-driving systems come onto the market, they will require that the GNSS component has an ISO 26262 safety certification,” Ruff said. “Many companies, including Trimble, are going through, or have gone through, the process of safety-certifying their offerings. As part of the AV system’s safety architecture, they will build in the capability to safely curb the vehicle if the system detects a malfunction or a spoof or some other type of problem.”
Automation Levels
In 2014, the international Society of Automotive Engineers released a standard, adopted in 2016 by the U.S. National Highway Traffic Safety Administration, that classifies cars in six levels, ranging from Level 0 (no automation) to Level 5 (full automation, meaning vehicles that can handle the full spectrum of road and traffic scenarios without any assistance from the driver). While many production models already incorporate various forms of Level 1 driver assistance, no current production car exceeds Level 2, or partial automation, which requires the driver to monitor the vehicle’s surroundings and take over as necessary. No test vehicle has yet achieved Level 5.
Image: GPS World
Other Sensors
Beyond lane-level positional accuracy, safe driving also requires avoiding collisions with other vehicles in the same lane or straying into it. Cameras, lidar and radar will detect other vehicles as well as fixed infrastructure and random obstacles, measure their distance, and monitor their movement.
While lidar scanners are better than cameras as detecting sharp-edged features, such as curbs, cameras are better at detecting and interpreting visual cues, such as road signs and the location and curvature of lane markers. In bad weather, radar is essential, because radio waves, unlike light waves, can penetrate rain, snow, fog and even dust, enabling radar to “see” where cameras and lidar cannot. However, radar sensors cannot see much detail, and cameras do not perform well in conditions with low light or glare.
Besides providing data about a vehicle’s trajectory, inertial navigation systems (INS) also measure its attitude (roll, pitch and yaw), enabling the software to better correlate and interpret data from the other sensors.
For example, when a car brakes sharply, its front end goes down; any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface.
INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and the vehicle’s true heading. A slip angle as small as 0.5 degrees can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks. Wheel-speed sensors also help verify the vehicle’s movement.
“All these technologies have their limitations,” Ruff said. “However, if you design the system, including all these technologies, then you can come up with a robust, safe combination that will enable autonomous driving.”
In addition to helping to avoid collisions, these other sensors provide relative positioning by comparing the images they acquire with highly precise maps to help locate the vehicle, especially in urban environments, which are well mapped and rich in recognizable landmarks.
Imagine an AV moving through different environments. It might travel from a city with urban canyons that degrade GNSS navigation, yet with landmarks that help relative positioning, to a rural environment devoid of both. The AVs’ algorithms must constantly weigh how much to rely on the different sensors. “Many of the OEMs and car companies are seeing that even rain mist on a highway is very bad for lidar and cameras, because it creates a big blur, but that is where GNSS will perform really well because it is open sky,” Heidinger said. “So, the two types of sensor systems complement each other very well.”
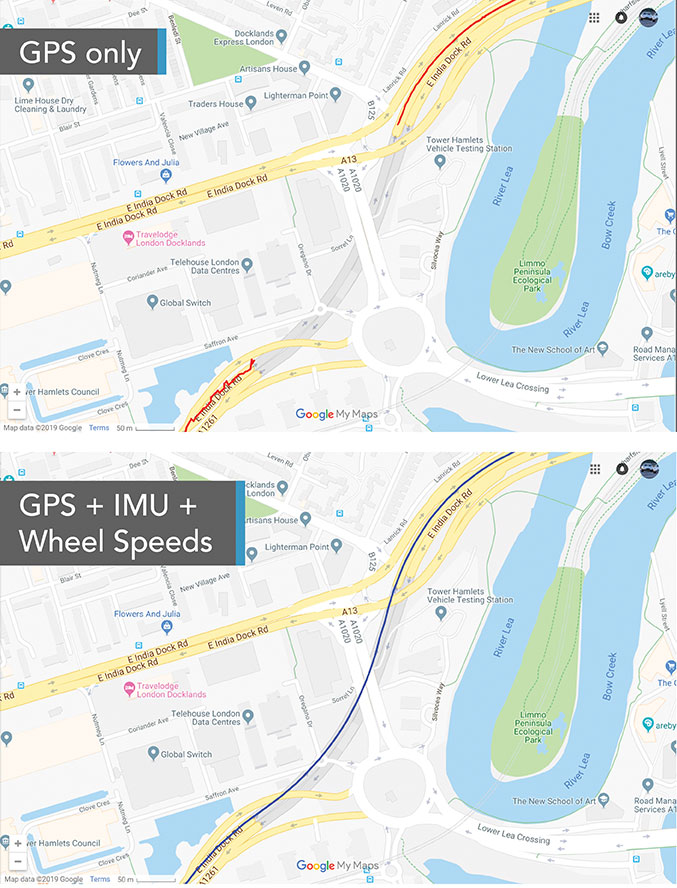
“Odometry sensors, such as a wheel-speed sensors, minimize any potential drift and add robustness to data that may have a GNSS outage of greater than 5 seconds, such as longer tunnels,” said Wesley Hulshof, principal engineer – ADAS Testing at Racelogic.
Photo: Racelogic
Noble sees a split in the industry. Companies such as Waymo and Cruise are pursuing Level 5 autonomy and are “heavy users of lidar” as well as other sensors. Companies such as Swift are focusing on Level 2 and Level 3 series production vehicles. “If you are making a mass manufactured vehicle for the production market, it rules out using a lidar sensor,” Noble said. “It is just too costly and complex right now to use. So, typically, if you look at the systems that are out on the market today, such as a Tesla Autopilot or a GM Super Cruise, they are very reliant on the camera as the primary sensor. Obviously, also inertial and some use of radar.”
Maps and Communications
While accurate and up-to-date maps have an important role to play in making autonomous driving possible, the more detailed maps are, the more the world they describe is constantly changing.
Meanwhile, the sensors keep improving and dropping in price, making maps less important. In the end, AVs — like human drivers — will probably rely much more on their ability to “see” and analyze their environment moment-to-moment.
Also like their human counterparts, they will gain experience. Unlike human drivers, however, AVs will be able to instantly share their experience with every other vehicle in their area via vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications.
V2V communications will enhance safety by informing AVs of the trajectories of nearby vehicles. If a vehicle is speeding toward an intersection and not slowing for a red light, it will be communicating its position and trajectory to other cars over a V2V link, Ruff explained.
“Then your car can make the intelligent decision to pump the brakes and avoid that collision. The same positioning stack that operates as part of the AV stack can also be used to support V2V-type applications, and the position of the vehicle will be much better than what the current V2V spec states.”
Different Approaches
Each GNSS manufacturer is taking a different approach to AV positioning.
The worlds of traditional automotive positioning and the products on which NovAtel has historically focused are coming together, Heidinger said. “The autonomous technology is demanding it and pushing for higher performance and safety-of-life functionality. Hexagon is bringing high-performance positioning solutions to the automotive industry in a manner that accepts automotive manufacturability, quality and efficiency.”
The company has also joined the 5G Automotive Association (5GAA), a large consortium developing AV solutions. “There are probably 100 companies in the industry coming together and helping to develop that vehicle-to-network communications solution, including telecom partners and automotive partners, and we are providing the GNSS expertise,” Heidinger said. “To meet the high-volume production-intent applications, including automotive quality, we recently developed a receiver based off the ST Teseo V family of measurement engines. We have an ST Teseo V set of chips on the PIM 222A product that launched in May geared exactly toward the automotive market.”
By contrast, Trimble is not focused on providing GNSS receivers or other hardware. “We allow the Tier 1 automotive manufacturers to architect the system using the components that they have selected from their preferred suppliers,” Ruff said. “We tailor our positioning solution to work with their architecture. So, we are agnostic as to the selection of the GNSS receiver, the IMU, the operating system running on the host system, and the host processor that runs the software. We can adapt our stack to run on virtually any system, using measurements from any GNSS source that meets our API requirements.”
For Swift, its “vision from day one has been to bring this type of precise positioning technology to mass market applications, such as automotive, which is a big focus for us,” Noble said. “That includes autonomy, but also ADAS, HD navigation and V2X. We do not want to be a hardware supplier in the automotive supply chain. Our boards are focused on professional and industrial markets.”
Swift’s automotive software, called Starling, runs on the vehicle’s computer. To generate a precise position, it ingests raw sensor data, as well as corrections data from the company’s Skylark network. “We focus on providing a precise-positioning stack that layers on top of any of this current generation of low-cost, automotive-grade receiver hardware from companies like STMicroelectronics.”
This test in London shows the value of inertial and wheel speed sensors. (Image: Racelogic)
The Future
Speculation abounds as to when AVs will enter mass production and how the transition from human to robotic drivers will take place. “There might be a ‘classics only’ lane in the future,” Heidinger said “that will be the only place where cars are allowed to be driven manually.”
Safety-enhancing automotive devices typically start out as optional extras, then get incorporated into best-practice standards promoted by independent bodies. Eventually, they become compulsory.
Some automakers have committed to creating their own AVs, while others are intent on creating a turnkey solution to transform conventional cars into driverless models. However, the initial market for AVs likely will be commercial fleets rather than individual consumers.
“It will still take quite a few years before we see cars take over and drive themselves, because legislation, insurance and these sorts of things will have to happen along with the technological advances,” Heidinger said. “But the positioning side is becoming more defined. We are seeing things like L5, the Galileo constellation, coming in and becoming more available. There are more constellations providing more data for use in our solutions, so that is promising.”
Swift’s Noble said, “Most of the major manufacturers working on Level 2+ and Level 3 systems are realizing that precision GNSS will be a key component of their architecture. Most of the major OEMs have signaled some level of intent to integrate this technology. Most are tracking to start the program next year,” he added.
“We envision that in five or six years every vehicle will have a single positioning utility on board that will serve all the location-aware applications on the car — whether it is an autonomous vehicle, V2V or V2I,” Ruff said. “It will meet the most stringent accuracy requirements from all the applications and serve navigation, telematics, security, V2X and AV/ADAS applications.”
Fleet management company Omnitracs LLC has partnered with Peloton Technology, a developer of connected and automated vehicle systems for U.S. and global freight carriers. Omnitracs and Peloton will collaborate to bring Peloton’s truck platooning technology to Omnitracs customers.
The partners will also develop joint solutions that combine each company’s safety, efficiency and fleet management capabilities.
Peloton will begin filling pre-orders of its flagship platooning product for Class 8 trucks in 2017. The technology synchronizes braking and acceleration between pairs of trucks through the integration of vehicle-to-vehicle (V2V) communications with radar-based collision avoidance systems, enabling the trucks to travel safely at aerodynamic following distances.
The Peloton system generates 4.5 percent fuel savings for the lead truck and 10 percent for the follow truck in a two-truck platoon, according to independent testing by the North American Council for Freight Efficiency.
Image: Omnitracs
For the driver of the follow truck, the Peloton system works similarly to adaptive cruise control with the added safety feature of V2V communications to enable automated braking within 0.1 second of braking by the lead truck. The driver of each truck controls steering while the platooning system coordinates speed and distance between the trucks, meeting the definition of SAE Level 1 automated driving.
Platoons are managed continuously by a cloud-based Network Operations Center that connects to trucks through cellular and Wi-Fi communications. Cloud-based supervision limits operation of platoons to specified roads in safe driving conditions.
Here is a video explaining Peloton platooning.
Peloton will help to roll out practical, cost-saving automated vehicle technology featuring leading-edge cybersecurity to Omnitracs customers, beginning with two-truck platooning. Omnitracs has a large customer base in the long-haul trucking segment which stands to benefit significantly from platooning.
“Peloton has developed technology that is on the cutting edge of advanced driver assistance systems and the automated vehicle movement,” said John Graham, CEO of Omnitracs. “Its emphasis on spatial awareness is a crucial and foundational component of improving truck safety and fuel efficiency.”
“We are excited to be part of the first partnership of a commercial platooning system supplier with a leading fleet management provider,” said Joshua Switkes, founder and CEO of Peloton Technology. “We will offer expanded opportunities for platooning across the broad customer base that Omnitracs has attracted by focusing on cost advantages for fleets.”
A key operational benefit of the partnership for fleet customers will be optimized matching opportunities for inter-fleet platooning, leveraging Omnitracs’ routing and dynamic dispatch applications to provide navigation assistance and clear savings calculations for scheduled and ad-hoc platoons of trucks from different fleets.
“This partnership will offer benefits to fleets of all sizes,” said Butch Winters, Peloton’s vice president of products, sales and business development. “In addition to helping fleets find more opportunities for platooning, we’re working with Omnitracs on new product features to enhance safety and efficiency for fleets and drivers.”
Co-developed solutions from the partnership may include integrated cloud-based fleet management services and hardware.
Danlaw Inc. has released its Through Glass Integrated V2X Antenna for vehicle-to-vehicle and vehicle-to-everything (V2X) communications.
The design incorporates an integrated GNSS antenna on the interior coupler. Optional cellular, Wi-Fi, and other antennas are also available on request.
The antenna pairs with dedicated short-range communications (DSRC) devices to enable vehicle-to-vehicle, and vehicle-to-infrastructure communications.
Traditional aftermarket antennas require drilling holes or passing cables through window and door openings, which risks damaging vehicle seals.
Danlaw’s dual-radio, glass-mounted antenna eliminates the risk of damaging the vehicle by using a coupling pair-to-pass DSRC signals between the vehicle’s interior and exterior.
The easy-to-install antenna can be mounted on the rear, front or side windows using automotive grade glass adhesive. This flexible installation allows the shortest cable route to the V2X device, reducing signal losses due to cable length, the company said.
“Our customers running pilot programs want to install V2X DSRC systems on vehicles with best-in-class RF performance without modifying their cars,” said Scott Morell, Danlaw’s vice president of engineering. “Combined with our Aftermarket V2X Safety Device, this enables V2X capabilities to be installed on vehicles simply and easily.”
The antenna enhances Danlaw’s Connected Vehicle portfolio which includes an aftermarket safety device (ASD) and V2X development tools.
The ASD has been selected by pilot programs supporting multiple applications, including critical safety advice, driver access solutions, and real-time road condition and congestion information.
Danlaw development tools include the OmniAir-certified Mx-DSRC Conformance Test System and Mx-Drive Mobility Simulator.
Detailed specifications for the antenna are available.
V2X companies u‑blox, Commsignia and NXP Semiconductors announced a strategic collaboration to address the rapidly growing demand for reliable vehicle‑to‑vehicle (V2V) and vehicle‑to‑infrastructure (V2I) technology.
The adoption of V2X technology in North America and European markets equips new vehicles with the ability to securely and anonymously share information with other similarly equipped vehicles, infrastructure and even pedestrians within a radius of up to 1 km.
IEEE 802.11p V2X technology is the only proven and production ready technology today that can reliably see around corners, the companies said. V2X information will augment the awareness of drivers to improve safety, reduce congestion and emissions, thereby delivering real savings and benefits to all road users today and in the future for self-driving autonomous vehicles.
This collaboration builds on the strengths of all three companies to deliver substantial time-to-market advantages and benefits to automotive customers, with future-proof solutions that optimize investments and mitigate risks.
Automotive manufacturers are looking for ways to bring V2X to market now, ramping up to 100 percent implementation in new cars within the next five years. This collaboration between three of the market leaders will accelerate the adoption of V2X technology thanks to the availability of fully integrated hardware and software solutions in a fully‑fledged and secure (US DOT SCMS compliant) V2X system.
https://youtu.be/fyGDrtVbUOY
“This collaboration focuses on delivering production-ready Vehicle‑to‑Vehicle (V2V) and Vehicle‑to‑Infrastructure (V2I) systems like our V2X communication module,” said Costas Meimetis, director of product strategy, u-blox. “We are already present in the market through our THEO module family, this collaboration will strengthen our position and allow u‑blox to innovate faster, bringing new solutions to market starting. Our expertise and this collaboration means we are uniquely positioned to meet the increasing demand from automotive manufacturers, who must meet new legislation in key markets.”
“NXP’s status as a Dedicated Short‑Range Communication (DSRC) V2X technology leader, is a key reason u‑blox chose NXP’s RoadLINK solution, a complete automotive-grade 2 +105C ambient, V2X system solution with best‑in‑class performance to power their V2X module,” said Rob Hoeben, senior director, V2X segment. V2X is the only ADAS technology that operates in real-time, lowest latency and sees around corners, facilitating self-driving autonomous vehicles.
V2X, IEEE 802.11p-based, is complementary to 5G versions of V2X and both technologies are expected to co-exist for the foreseeable future. NXP has participated in several V2X demos and trials, including truck platooning, achieving short separation distances between trucks.
NXP’s RoadLINK solution, which is now in production with a major North American OEM, will help ensure the u-blox module can deliver accurate and reliable communications to and from a vehicle.
“Commsignia leads the market with the best end‑to‑end V2X software suite for connecting cars and smart city infrastructure,” said Jozsef Kovacs, CEO of Commsignia. “Combined with the NXP RoadLINK chipset and u‑blox module, automotive manufacturers can benefit from the enhanced performance of a secure and fully integrated solution to implement V2X technology in new vehicle designs, so taking the next step towards improving the safety and efficiency of our roads.”
u-blox, Commsignia and NXP, will be demonstrating live how this collaboration is enabling life-saving V2V applications at the TU-Automotive Detroit Conference and Expo June 7‑8. The demo entitled “Fast track to safe & secure V2X” will show the following use cases:
We asked major players in the connected vehicles marketplace for their views on expected deployment timelines, remaining challenges such as reliable positioning technology, integration with existing systems, and the implications on autonomous vehicle technology.
Curated and introduced by Chaminda Basnayake, Principal Engineer, Market Development, Locata Corporation
State of the Industry: Connected Vehicles
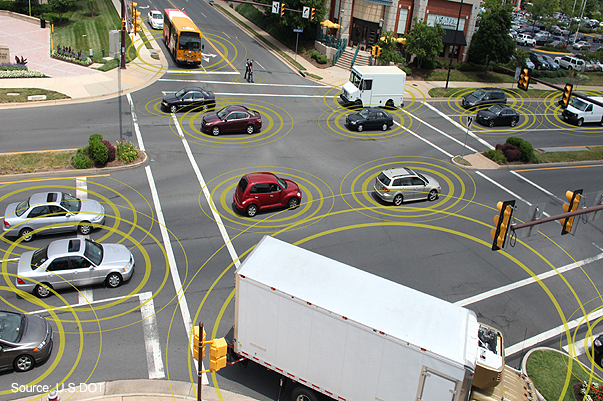
Intersection Movement Assist warns the driver if it is not safe to enter an intersection, for example, if another vehicle is running a red light or making a sudden turn. (Image: U.S. Department of Transportation)
The U.S. Department of Transportation (USDOT) released a Notice of Proposed Rulemaking (NPRM) in December 2016 for the deployment of Dedicated Short Range Communications (DSRC)-based vehicle-to-vehicle (V2V) safety applications as part of the connected vehicles (CV) and automated vehicles (AV) initiative. If all goes well, this mean a V2V deployment mandate for new passenger vehicles likely starting in 2021 and reaching all new vehicles within 2–3 years.
Standards required for V2V deployment were published in 2016 or before, including the V2V Minimum Performance Requirements SAE 2945/1, leading the way for commercial product development. The USDOT, which has been the catalyst behind V2V industry R&D starting from the automaker collaboration CAMP (Crash Avoidance Metrix Partnership) in 2001, is conducting CV Pilot programs in New York, Wyoming and Florida. These offer the opportunity for state DOTs, vendors and all other stakeholders to test the technology in real-life scenarios.
Automotive OEMs have been developing this technology for more than a decade, and the NPRM is the beginning of a race toward integrating V2V to production vehicles. Deploying V2V technology requires the close cooperation of OEMs, their suppliers and many other stakeholders.
The following transportation article captures the views of major players in the CV marketplace on expected deployment timelines, remaining challenges such as reliable positioning technology, integration with existing systems, and the implications on AV technology.
By Curtis Hay Technical Fellow, GNSS and Precise Maps, General Motors
General Motors is the first automaker to offer V2V technology in North America with the 2017 interim model year Cadillac CTS. These V2V-equipped vehicles share information to alert drivers of upcoming potential hazards. Cadillac’s V2V uses DSRC and GPS, and can handle 1,000 messages per second from vehicles up to nearly 1,000 feet away. For example, when a car approaches an intersection, the technology scans the vicinity for other vehicles and tracks their positions, directions and speeds, warning the driver of potential hazards.
GM continues to make technology investments in V2V to achieve greater global market volumes. We have been developing V2V technology for the past several years and are exploring potential enhancements to the V2V features currently offered. Nearly all global OEMs are developing V2V today, but market readiness, adoption and technology maturity vary greatly between regions and manufacturers. I expect other OEMs will begin to deploy V2V systems beyond model year 2017.
We believe that autonomous vehicles will require some level of connectivity — there is no way around this. V2I connectivity is required for precise map updates, emergency call alerts, GNSS corrections, remote diagnostics, traffic and weather updates, and many more applications — both existing and emerging. V2V communication will also be an important technology to improve safety and reliability as autonomous vehicles become more broadly deployed.
As a technical challenge, the limitations of GNSS are certainly understood by automakers for applications such as vehicle navigation, stolen vehicle tracking and emergency response services. Many recent advances in vehicle positioning technology mitigate the effects of urban multipath and poor sky view. These include higher quality micro-electro-mechanical systems (MEMS) sensors, low-cost lidar, visual inertial odometry, wheel encoders, precise maps and more GNSS satellites in view.
We believe that high-confidence lane classification is becoming possible even in dense urban environments, thanks to these and other advancements. Infrastructure augmentation will certainly help, and these investments are gradually being made by state and local governments. However, technology development occurs at a faster pace inside the vehicle versus along our roadways.
There is growing demand for low-cost, high-quality automotive cameras and radar components that will be critically important for CV and AVs. I expect some degree of sensor data sharing over V2V will enter the industry within a 4–5-year time frame. Today, not all automotive cameras are designed to provide real-time video output across a high bandwidth interface such as low-voltage differential signaling (LVDS).
Furthermore, DSRC protocol and LTE Release 14 are not yet broadly accepted among competing OEMs. V2V innovations will occur as OEMs see what is possible, and customer demand for safety and reliability increases. Once the auto industry has passed the 50% milestone for market penetration of V2V vehicles, the rate of adoption will be much higher for new vehicle builds.
Denso’s autonomous vehicle research and development ranges from head-up display to voice recognition and human machine interfaces.
As we know, GM offers V2V in the current model year CTS, and Toyota deployed ITSConnect in Japan in 2016. So, multiple OEMS have cars on the road and appear to see the value of V2V.
A retrofit V2V, a universally acceptable U.S. National Highway Traffic Safety Administration (NHTSA)-compliant solution that could be installed at a dealership, is an interesting concept that has been around in recent years. This will allow OEMs to comply with the rule much quicker. However, that concept is easier said than done, and it hasn’t been the focus of the industry up until now.
I see connectivity as nearly a requirement to get to highly AV in the future. On a limited-access highway, connectivity is probably not a requirement, as there are predictable and infrequent “high anxiety” encounters. In an urban setting, however, many other elements complicate the necessary behavior and reaction; and therefore I see the most value from connectivity.
Sensors such as cameras can detect the state of a traffic light with some level of certainty, but often the situation is complicated, such as the need to differentiate between a straight versus a turn signal. Even in highway scenarios, we can see how connectivity can favorably impact use cases like truck platooning and cooperative automated cruise control.
For positioning, it may be that a terrestrial solution will be necessary in difficult GNSS environments such as New York. It’s clear traditional GNSS is not capable of performing at the level required for the cooperative crash avoidance capability that NHTSA desires. Ranging systems that operate as a part of V2I and high-definition maps with lidar could be potential augmentations. I can relate the latter to how humans drive: Although we are not aware of our position, we can certainly drive in Manhattan (with difficulty!) by observing lanes, curbs and other relative
I envision V2V as part of a typical in-vehicle sensor suite at some point without exception; vehicles will eventually communicate what they see with their sensors to others via DSRC. Denso holds a patent that proposes to use on-board sensing to detect the presence of unequipped vehicles and send a proxy basic safety message (BSM) to other vehicles through DSRC.
In the V2V NPRM, NHTSA defines benefits in terms of lives saved under full penetration, but we believe benefits can be shown under much lower levels. For example, in the Ann Arbor Safety Pilot, even with under 5% penetration, anecdotally the University of Michigan buses averaged about one warning every 150 miles during the trial, a significant number of warnings.
By Roger C. Lanctot Director, Automotive Connected Mobility, Strategy Analytics
We think the best-case U.S. V2V deployment scenario might be 2021 — but given the challenges in security management, the ongoing testing of spectrum sharing by the Federal Communications Commission (FCC), and the lack of infrastructure support — we think an even later commencement is likely. This means that early 5G deployments will already be beginning.
It is worth noting that the NPRM provides for alternative technologies as long as the performance requirements are met. The interest in DSRC in Europe has waned significantly, and Toyota appears to be the only company aggressively investing in Japan. China appears to be heading towards 5G for V2X.
In our view, given the vast uncertainties, it makes little sense to proactively add a box that will add cost along with driver distraction and security vulnerabilities. Vehicles will benefit from connectivity regardless of the technology used, but many more miles must be driven before a level of sufficient confidence is reached to integrate V2V with safety systems.
We believe DSRC-based V2V is decades away from delivering a reliable and warrantee-able or life-saving value proposition. Even NHTSA has suggested it may take as long as 20 years before significant value is returned to the manufacturers, let alone the consumer, making the investments today.
We do not think the industry is prepared to integrate safety systems with V2V for a broad range of reasons — GNSS vulnerabilities in urban canyons being one of them. This is the scenario in which additional sensors and high-definition maps can add to location accuracy. Details not only on the road, but also on the location and geometry of buildings, trees, street furniture and more can be gathered by sensors during the mapping process. The vehicle camera and/or lidar sensors can then be used to position the vehicle against this map.
We think a base map will be generated by the mapping entity using vehicles equipped with high-quality sensors and location technology, and then this will be updated by user-gathered data, as well as continued use of the mapping vehicles. This is the approach taken by the likes of TomTom, Mobileye and Civil Maps.
Cellular networks are de facto infrastructure assistants today, and we expect those capabilities to be enhanced. Connectivity is a nice-to-have for AV — not necessary. With the onset of 5G this will change a little bit, but AVs will always have to be able to operate without a connection, in our opinion.
Connected Car a Critical Stepstone to Automated Vehicle and Driverless Driving
By Jonathan Auld
Director, Safety Critical Systems, NovAtel Inc.
I think some OEMs and Tier1s will integrate the technology in advance of the full mandate and thereby reduce the time to widespread adoption. The benefits of V2V may not be fully realizable at first, but will increase as more equipped vehicles and infrastructure becomes available.
It’s a false assumption that any one technology will resolve CV or AV positioning challenge. The challenging environments and user expectations for high availability and safety will require multiple sensors and systems.
In this context, we see the CV as a critical stepping stone to the AV. CV provides a critical link for V2V communications in low/no-visibility/hidden-object situations as well as a pipe for critical mapping and road network information to the car. As part of this, the GNSS receiver plays a role in being an all-weather absolute position and time reference that can tie all the other sensors together. GNSS has its limitations, as do other sensors, which leads to the multi-sensor fusion approach for accuracy, availability and safety.
The automotive industry’s understanding of GNSS performance is largely driving from the perspective of L1-only single- and dual-constellation receivers. In both the CV and AV use cases, there is a push for more accuracy from GNSS. When moving to a higher performance expectation from GNSS, issues come up that are new to the automotive industry.
For consistent sub-meter-level performance, we start to consider multi-frequency receivers with correction/integrity services supporting them. This is where we see PPP (precise point positioning) as a key technology. Taking advantage of our global PPP correction network for corrections, authentication and safety services will make this performance possible. Also, antenna quality and location become more important. In urban environments where GNSS is less available, we expect a multi-sensory solution to aid GNSS through outages, but still keep lane-level performance as long as possible and safe.
Given the significant challenges on the automotive environment, I would expect that new and innovative ways of gathering and sharing additional information between vehicles and the infrastructure will be developed. It’s entirely feasible that future systems will share as much data as is practical, with the cloud to allow for better map generation and data dissemination. All of this will be driven by the need to keep the systems as available as possible while still maintaining safety.
Dual-Band Carrier Phase for Lane Position
By Rod Bryant
Senior Director, Positioning Technology, u-blox
We expect to see early adopters integrating the technology ahead of the mandate in selected models such as GM with Cadillac-CTS planned for this year. Depending upon the applications to be supported, DSRC fleet penetration of over 70–80% is probably needed for it to become a truly all-round sensor. That’s why the forthcoming legislation in the U.S. is so important for solving the chicken-and-egg problem, as well as the development of aftermarket V2X.
The combination of CV safety applications with features that use in-vehicle sensors would be a natural evolution. Sooner or later every vehicle will be able to see what others see.
For Level 4 AV systems, GNSS is needed to unambiguously identify the road segment. Highway pilot should not be used off the highway; for lane-accurate positioning with integrity on the urban highway and main roads, we are using dual-band carrier phase positioning with wide area State Space Representation (SSR) corrections and automotive-grade INS. This combination of technologies can cope with the level of interruptions to carrier phase lock and the multipath distortion caused by bridges, signs, trees and buildings in such environments.
As we move deeper into the urban canyon, additional measures will be needed. More advanced multipath mitigation, terrestrial ranging and beamforming techniques could contribute to the solution. V2I ranging is a particularly attractive and obvious example. However other ranging sources could also be utilized. Various beamforming approaches are possible with various levels of disadvantage regarding the accommodation of antenna arrays into the car.
Inevitably, there will be periods of unavailability of GNSS-based lane-level accurate position deep in the urban canyon when required protection limits cannot be met within the required level of integrity risk. It is essential that these are managed properly in the reliance on different sensors at different times and, for lower levels of autonomy, in the interactions between machine and driver.
We see automated driving as a related but separate evolution. The crux of the automated-driving problem is how to manage risk in such a complex scenario. Multiple sensors are being used by OEMs to determine the position of the vehicle with respect to roads and for collision avoidance. Those sensors include GNSS/IMU, radar and lidar, which have overlapping capabilities across conditions. This allows the decomposition of the Automotive Safety Integrity Level (ISO26262 ASIL) requirements.
A combination of all of these sensors is required to meet the stringent safety goals. In that context, V2X will clearly play a role, but may not be seen as a prerequisite. The cooperative nature of V2X operation presents challenges for the application of functional safety methodologies like ISO26262. Partly for that reason, we do not expect the application of V2X to autonomous driving before 2025.
A V2X test system developed by Spirent and Tata Elxsi has been adopted by CAICT, a scientific research institute directly under the Ministry of Industry and Information Technology of China.
V2X, or “vehicle to everything,” includes vehicle to vehicle (V2V) and vehicle to infrastructure (V2I) connected technology as well as vehicles to pedestrians, devices or transportation grids.
Tata Elxsi, based in Bangalore, India, is a design and technology services provider for product engineering in industries including broadcast, communications and automotive.
The next-generation test system provides a flexible, scalable and comprehensive test environment for testing and performance benchmarking of V2X applications, in various stages of the development cycle, from early research up to pre-production.
The China Academy of Information and Communications Technology (CAICT) in Beijing.
Using a combination of Tata Elxsi’s patent-pending V2X Emulator software and Spirent’s advanced solutions for GNSS and radio channel simulation, the integrated V2X test bed offers the ability to bring real-world traffic scenarios into the lab, significantly reducing costs and time associated with extensive field testing.
Various driving scenarios can be emulated under a variety of terrain, wireless channel and atmospheric conditions. The V2X test bed, which supports both WAVE-DSRC (U.S., Asia) and ITS-G5 (Europe) standards, offers a comprehensive platform for both functional and performance assessment of V2V and V2I/I2V safety applications, V2X security testing and test report generation.
“V2X technology is gaining tremendous interest among global OEMs and tier-1 companies for delivering safer driving experience,” said Nitin Pai, senior vice president of marketing, Tata Elxsi. “With China being the largest automotive market in the world, this latest win with CAICT in China is significant for us and automotive companies targeting this market.”
The V2X Test System enables multi-standards compliance testing using a single solution. The system has the capability to emulate more than 100 onboard units (OBU) and roadside units (RSUs) on a single hardware, enabling repeatable testing of complex scenarios from early development stages without the high risks and costs associated with live vehicle testing.
“V2X communication will contribute significantly to making the autonomous car a safe and secure reality,” said Peter Tan, Greater China and East Asia, Spirent. “The U.S. DOT’s [Department of Transportation] newly issued regulation proposal mandating V2V communication for light vehicles is another confirmation of this widely accepted fact. With test solutions for conformance, functionality and performance developed in partnership with Tata Elxsi, Spirent is proud to help our customers ensure that their devices meet all conformance functionality and performance requirements to master these major changes ahead.”
Tata Elxsi is showcasing the V2X Test System along with an array of other automotive solutions covering integrated e-cockpit, infotainment, ADAS, autonomous vehicle technology and telematics at its booth 6223 at CES 2017, Las Vegas.
Attention-grabbing graphic from “Navigating Autonomous Requirements” at ION-ITM.
The talk veered off into rather heady philosophical realms at the plenary session for ION’s International Technial Meeting in late January. Two of the three speakers had been encouraged to go well outside the box — and not to employ any equations in doing so — to address or envision the autonomously navigated future.
We are caught in the act of seeing ourselves become obsolete, at least behind the steering wheel of an automobile. The Google driverless car has logged more than a million miles, exploring the traffice terrain that will soon be home to millions of autonomous vehicles. What has it found? That the human in the loop (HiL) is the biggest source of error and catastrophe.
There remain a few technical issues to sort out before this particular future is upon us. One of these, one that excites John Fischer of Spectracom, is the time-sensitive network concept: a standard and securable network that provides a platform for connecting critical system infrastructure with IT features. These networks deal in velocity accuracies of centimeters per millisecond, The V2V and V2X (vehicle-to-vehicle and vehicle-to-network) systems that will support autonomous driving must reduce latency to nearly imperceptible levels for functions like crash avoidance and lane awareness to work reliably.
We were encouraged to consider the ethics of autonomous navigation by Mikel Miller of the Air Force Research Lab, Sensors Directorate. Once the vehicle becomes autonomous, it decides for the driver — including life or death choices.
Imagine a situation that could actually happen less than a decade from now. Riding in a driverless car on a curving coast highway, you round a curve to see a group of children crossing the road. Detecting them, the car begins to brake, but quickly calculates it cannot stop in time. Programmed to avoid collisions with pedestrians and other vehicles, it is also programmed to protect its passengers. It must choose between carnage on the highway or driving you off the adjacent cliff into the ocean.
Which to choose? Four lives versus one. Other ethical dilemmas have arisen in the history of GPS, GNSS, and precise PNT, chiefly concerning privacy. We are about to enter a more difficult realm.
In his final State of the Union address, delivered Jan. 12, President Obama signaled his intent to invest in a 21st century transportation system.
U.S. Transportation Secretary Anthony Foxx has revealed part of the president’s proposal: a 10-year, nearly $4 billion investment to accelerate the development and adoption of safe vehicle automation through real-world pilot projects.
Secretary Foxx also announced that the U.S. Department of Transportation (DoT) is removing potential roadblocks to the integration of innovative, transformational automotive technology that can significantly improve safety, mobility and sustainability.
Secretary Foxx made the announcement at the North American International Auto Show in Detroit, where he was joined by leaders in technology, executives of traditional auto manufacturers, and newcomers to the industry.
“We are on the cusp of a new era in automotive technology with enormous potential to save lives, reduce greenhouse gas emissions, and transform mobility for the American people,” said Secretary Foxx. “Today’s actions and those we will pursue in the coming months will provide the foundation and the path forward for manufacturers, state officials, and consumers to use new technologies and achieve their full safety potential.”
The president’s FY17 budget proposal would provide nearly $4 billion over 10 years for pilot programs to test connected vehicle systems in designated corridors throughout the country, and work with industry leaders to ensure a common multistate framework for connected and autonomous vehicles.
Secretary Foxx also unveiled policy guidance that updates the National Highway Traffic Safety Administration’s (NHTSA) 2013 preliminary policy statement on autonomous vehicles. The new guidance, just released, reflects the reality that the widespread deployment of fully autonomous vehicles is now feasible.
“NHTSA is using all of its available tools to accelerate the deployment of technologies that can eliminate 94 percent of fatal crashes involving human error,” said NHTSA Administrator Mark Rosekind. “We will work with state partners toward creating a consistent national policy on these innovations, provide options now and into the future for manufacturers seeking to deploy autonomous vehicles, and keep our safety mission paramount at every stage.”
DOT is committing to the following milestones in 2016:
Within six months, NHTSA will work with industry and other stakeholders to develop guidance on the safe deployment and operation of autonomous vehicles, providing a common understanding of the performance characteristics necessary for fully autonomous vehicles and the testing and analysis methods needed to assess them.
Within six months, NHTSA will work with state partners, the American Association of Motor Vehicle Administrators, and other stakeholders to develop a model state policy on automated vehicles that offers a path to consistent national policy.
Secretary Foxx encouraged manufacturers to submit rule interpretation requests where appropriate to help enable technology innovation. For example, NHTSA responded to an interpretation request from BMW confirming that the company’s remote self-parking system meets federal safety standards. Click here to read this interpretation.
When interpretation authority is not sufficient, Secretary Foxx further encouraged manufacturers to submit requests for use of the agency’s exemption authority to allow the deployment of fully autonomous vehicles. Exemption authority allows NHTSA to enable the deployment of up to 2,500 vehicles for up to two years if the agency determines that an exemption would ease development of new safety features.
DOT and NHTSA will develop the new tools necessary for this new era of vehicle safety and mobility, and will consider seeking new authorities when they are necessary to ensure that fully autonomous vehicles, including those designed without a human driver in mind, are deployable in large numbers when they are demonstrated to provide an equivalent or higher level of safety than is now available.
In 2015, Secretary Foxx refocused the national dialogue about the future needs of our transportation infrastructure by releasing Beyond Traffic, a report examining the challenges facing America’s infrastructure over the next three decades. This draft framework has already influenced decisions by elected officials, planners and stakeholders nationwide, the DOT said.
In December 2015, the Secretary launched the Smart City Challenge, a national competition to implement bold, data-driven ideas that make transportation safer, easier and more reliable. He also worked to accelerate the DOT’s efforts to incorporate vehicle-to-vehicle (V2V) communication technology into new vehicles.
The University of Michigan (U-M) has opened Mcity, a controlled environment designed to test the potential of connected and automated vehicle technologies that will lead the way to mass-market driverless cars.
Mcity is a 32-acre simulated urban and suburban environment that includes a network of roads with intersections, traffic signs and signals, streetlights, building facades, sidewalks and construction obstacles. It is designed to support rigorous, repeatable testing of new technologies before they are tried out on public streets and highways.
“There are many challenges ahead as automated vehicles are increasingly deployed on real roadways,” said Peter Sweatman, director of the U-M Mobility Transformation Center (MTC). “Mcity is a safe, controlled, and realistic environment where we are going to figure out how the incredible potential of connected and automated vehicles can be realized quickly, efficiently and safely.”
In particular, Mcity allows researchers to simulate the environments where connected and automated vehicles will be most challenged. Even seemingly minor details a vehicle might encounter in urban and suburban settings have been incorporated into Mcity, such as road signs defaced by graffiti and faded lane markings.
The types of technologies that will be tested at the facility include connected technologies — vehicles talking to other vehicles or to the infrastructure, commonly known as V2V or V2I — and various levels of automation all the way up to fully autonomous, or driverless vehicles.
Mcity was designed and developed by U-M’s interdisciplinary MTC, in partnership with the Michigan Department of Transportation (MDOT). It is a public-private partnership among industry, government and academia. The center was established to lay the foundation for a commercially viable ecosystem of connected and automated mobility that will revolutionize the movement of people and goods worldwide. A key MTC goal is to put a shared network of connected, automated (including driverless) vehicles on the road in Ann Arbor by 2021.
“We believe that this transformation to connected and automated mobility will be a game changer for safety, for efficiency, for energy, and for accessibility,” Sweatman said. “Our cities will be much better to live in, our suburbs will be much better to live in. These technologies truly open the door to 21st century mobility.”
The facility also underscores Michigan’s emergence as a leader in advanced mobility, building on the state’s position as the global center of automotive research and development for more than a century, U-M said in a news release. Today, Michigan is home to 375 automotive research centers, and has the highest concentration of industrial and mechanical engineers in the country.
MTC is a public-private partnership among industry, government and academia. The center was established to lay the foundation for a commercially viable ecosystem of connected and automated mobility that will revolutionize the movement of people and goods worldwide. A key MTC goal is to put a shared network of connected, automated (including driverless) vehicles on the road in Ann Arbor by 2021.
MTC’s industry and government partners reflect the diversity of perspectives required to meet the challenges ahead. In the private sector, MTC partners include automakers and top-tier auto suppliers, but also traffic signal and traffic sensing companies, insurance providers, telecommunications, big data, IT and more. On the public side, MTC is working with federal, state and city governments.
“Mcity represents an important partnership between government at all levels, private industry and academia,” said Kirk Steudle, director of the Michigan Department of Transportation. “State of Michigan officials are thrilled to be part of this vital collaborative, which will ensure that Michigan continues to be the world’s auto leader.”
In addition to Mcity, MTC has three on-roadway connected and automated vehicle deployments underway. With the help of the Michigan Economic Development Corporation, MTC is building on a nearly 3,000-vehicle connected technology project launched three years ago by the U-M Transportation Research Institute to create a major deployment of 9,000 connected vehicles operating across the greater Ann Arbor area. MTC is also partnering with industry and the Michigan Department of Transportation to put 20,000 connected vehicles on the road in Southeast Michigan. The third piece of the plan calls for deploying a 2,000-vehicle mobility service of connected and automated vehicles in Ann Arbor.
MTC was launched in 2013 and Mcity construction began last year. About $10 million has been invested in the test facility, with funding coming from U-M and MDOT. Mcity will be available for use by any organization, but priority will be given to MTC partners and U-M faculty and students.
MTC is working with 15 Leadership Circle member companies, each investing $1 million over three years, and engaging in thought leadership. Thirty-three Affiliate Members are also contributing, and investing $150,000 over three years. Current Leadership Circle companies are:
u-blox, a wireless and positioning module maker, has become a member of the CAR 2 CAR Communication Consortium. The industrial-driven consortium is dedicated to the development and deployment of Cooperative Intelligent Transport Systems (C-ITS).
The consortium’s ultimate goal is to improve road traffic safety and efficiency. It is working to develop roadmaps for vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications and to harmonize related standards. Lane-accurate positioning and short-range communication technology, both a focus of u-blox, play an important role for ITS applications.
u-blox is a provider of wireless positioning and communications modules and chips to the automotive industry. “We see the work of the CAR 2 CAR Communication Consortium as pivotal to the success of C-ITS deployment, both in Europe and further afield,” u-blox CEO Thomas Seiler said. “Its working groups and technical committee are undertaking very important work to ensure that vehicle communications technologies will contribute to saving lives and reduce injury by making our roads safer. We’re delighted to be able to contribute to that effort.”
Connected vehicles can help to mitigate crashes on busy urban streets.
The U.S. Department of Transportation’s (DOT) National Highway Traffic Safety Administration (NHTSA) announced today that it will begin taking steps to enable vehicle-to-vehicle (V2V) communication technology for light vehicles. This technology would improve safety by allowing vehicles to “talk” to each other and ultimately avoid many crashes altogether by exchanging basic safety data, such as speed and position, ten times per second, the agency said.
“Vehicle-to-vehicle technology represents the next generation of auto safety improvements, building on the life-saving achievements we’ve already seen with safety belts and air bags,” said U.S. Transportation Secretary Anthony Foxx. “By helping drivers avoid crashes, this technology will play a key role in improving the way people get where they need to go while ensuring that the U.S. remains the leader in the global automotive industry.”
DOT research indicates that safety applications using V2V technology can address a large majority of crashes involving two or more motor vehicles. With safety data such as speed and location flowing from nearby vehicles, vehicles can identify risks and provide drivers with warnings to avoid other vehicles in common crash types such as rear-end, lane change, and intersection crashes. These safety applications have been demonstrated with everyday drivers under both real-world and controlled test conditions.
The safety applications being developed provide warnings to drivers so that they can prevent imminent collisions, but do not automatically operate any vehicle systems, such as braking or steering. NHTSA is also considering future actions on active safety technologies that rely on on-board sensors. Those technologies are eventually expected to blend with the V2V technology. NHTSA issued an Interim Statement of Policy in 2013 explaining its approach to these various streams of innovation. In addition to enhancing safety, these future applications and technologies could help drivers to conserve fuel and save time.
V2V technology does not involve exchanging or recording personal information or tracking vehicle movements. The information sent between vehicles does not identify those vehicles, but merely contains basic safety data. In fact, the system as contemplated contains several layers of security and privacy protection to ensure that vehicles can rely on messages sent from other vehicles and that a vehicle or group of vehicles would be identifiable through defined procedures only if there is a need to fix a safety problem.
In August 2012, DOT launched the Safety Pilot “model deployment” in Ann Arbor, Michigan, where nearly 3,000 vehicles were deployed in the largest-ever road test of V2V technology. DOT testing is indicating interoperability of V2V technology among products from different vehicle manufacturers and suppliers and has demonstrated that they work in real-world environments.
In driver clinics conducted by the Department prior to the model deployment, the technology showed high favorability ratings and levels of customer acceptance. Participants indicated they would like to have V2V safety features on their personal vehicle.
“V2V crash avoidance technology has game-changing potential to significantly reduce the number of crashes, injuries and deaths on our nation’s roads,” said NHTSA Acting Administrator David Friedman. “Decades from now, it’s likely we’ll look back at this time period as one in which the historical arc of transportation safety considerably changed for the better, similar to the introduction of standards for seat belts, airbags, and electronic stability control technology.”
NHTSA is now finalizing its analysis of the data gathered as part of its year-long pilot program and will publish a research report on V2V communication technology for public comment in the coming weeks. The report will include analysis of the Department’s research findings in several key areas including technical feasibility, privacy and security, and preliminary estimates on costs and safety benefits. NHTSA will then begin working on a regulatory proposal that would require V2V devices in new vehicles in a future year, consistent with applicable legal requirements, Executive Orders, and guidance. DOT believes that the signal this announcement sends to the market will significantly enhance development of this technology and pave the way for market penetration of V2V safety applications.
“We are pleased with the direction NHTSA is taking in terms of V2V technology,” said Greg Winfree, Assistant Secretary for Research and Technology. “The decision to move forward comes after years of dedicated research into the overwhelming safety benefits provided by a connected vehicle environment.”
V2V communications can provide the vehicle and driver with 360-degree situational awareness to address additional crash situations — including those, for example, in which a driver needs to decide if it is safe to pass on a two-lane road (potential head-on collision), make a left turn across the path of oncoming traffic, or in which a vehicle approaching at an intersection appears to be on a collision course. In those situations, V2V communications can detect threats hundreds of yards from other vehicles that cannot be seen, often in situations in which on-board sensors alone cannot detect the threat.
NHTSA has worked in close partnership in this research both with other DOT agencies, including the Office of the Assistant Secretary for Research and Technology and the Federal Highway Administration, and with several leading auto manufacturers and academic research institutions, who have invested significant resources into developing and testing V2V technology. The collaboration of government, industry and academia is critical to ensure V2V technology’s interoperability across vehicles.