Machine control systems, which combine positioning sensors — both GNSS receivers and inertial systems — with computer displays, give operators better insight into and control over their work. Whether moving dirt on a construction site, spraying crops on a large farm, or moving cargo containers in a port, machine control increases efficiency and precision while decreasing accidents and fuel consumption.
Machine control systems enable operators to accurately position buckets, blades and other implements on their machines without having to first survey and stake the work site, or having to constantly check their work. They give operators a clear reference between the position of the machine bucket or blade and the design surface, thereby increasing their productivity and accuracy. They also utilize labor and equipment efficiently to reduce costs and minimize wear-and-tear. Finally, by collecting data during their operations, they help teams communicate better and share models.
Machine control, which first began to be implemented in the 1990s, is being increasingly adopted across a variety of different types of construction equipment — including graders, dozers, and, more recently, excavators. Now, beyond simply providing operators with a visual guide to the position of their buckets or blades, automated machine control moves the blade to grade by talking directly to the machine’s hydraulics, enabling new or less-skilled operators to perform like long-time professionals and increasing the speed and precision of even the most experienced operators.
The three case studies in this cover story highlight the need for precision control of the implements on earth-moving machines, the importance of good data and the need to make the process as easy as possible for the operator.
ComNav Technology
Enhancing construction projects in the Maldives
The Maldives consists of numerous coral reef islands with low soil-bearing capacity. Using heavy machinery in such an environment requires careful management of movement and precise operations while avoiding damage to local coral reef ecosystems, thus preserving marine life and the natural landscape of the islands.

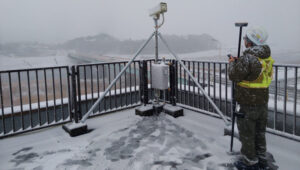
As an advanced construction solution, ComNav Technology’s XE100 Guidance System for Excavator employs high-precision GNSS positioning and heading technology coupled with inertial sensors. In construction projects in the Maldives, the XE100 not only provides precise guidance for operators on land but also enables efficient and precise underwater operations in complex marine environments while minimizing ecological impact. Its excellent performance has brought significant benefits to construction projects in the Maldives.
The Maldives’ construction environment is complex and variable, requiring precise equipment to adapt to diverse terrain. The XE100 supports multi-constellation multi-frequency GNSS, delivering centimeter-level accuracy. This ensures that, whether for leveling, slope cutting, or digging, the system delivers precise instructions for bucket operations and guarantees accurate excavator positioning, even in challenging conditions.

For scenarios requiring underwater operations or mixed land and water tasks, the XE100 overcomes the traditional challenge of locating exact coordinates. The GNSS tablet’s intuitive display of coordinate points helps operators identify work areas and select appropriate excavation actions. This ensures safety, reduces technical barriers, minimizes the need for rework, and significantly enhances construction quality while maintaining high efficiency and precision.
Construction projects in the Maldives often face challenges such as high humidity, high salinity and frequent vibrations. Each component of the XE100 is designed to withstand harsh environments with excellent durability. The system’s modular design also supports expansion to other construction machinery, enhancing flexibility and paving the way for future technological upgrades.
As a nation abundant in marine resources and dependent on tourism, ongoing infrastructure development and maintenance are critical to the Maldives’ economy. The XE100 system improves construction accuracy, reduces operation time, ensures safety, and lowers costs, thereby accelerating project timelines.
Leica Geosystems
Machine control and automation for snow management
The allure of pristine slopes and perfectly crafted terrain parks has always drawn adventurers to the mountains, but the landscape of snow management is shifting dramatically. With rising temperatures and unpredictable weather patterns, climate change poses a significant challenge to the snow sports industry. Natural snowfall is becoming less reliable, leaving resorts dependent on costly snowmaking systems that strain resources and budgets.
For snowparks, these challenges are even more acute. Crafting intricate features such as halfpipes, jumps and rails requires precision and significant amounts of snow — an increasingly scarce resource. Amid these difficulties, the need for sustainability has never been more pressing.
The tech that’s changing the game
Leica Geosystems’ snow management solution, the Leica iCON alpine, paired with Prinoth snow groomers, is helping resorts get more out of less, making the construction of snowparks more efficient and sustainable.
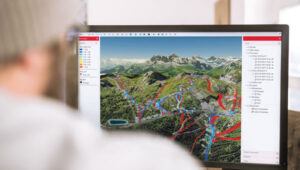
The Leica iCON alpine system leverages GNSS and advanced inclination sensors and inertial measurement units (IMUs) to measure and manage snow depth accurately. Mounted on any snow groomer, this system continuously collects data, ensuring that operators can see the exact snow depth beneath the blade and tracks — accurate to within ±3 cm. In other words, it’s like X-ray vision for your snowcat.

Need a perfect jump? Create a 3D model and import the data, which can be read on the screen inside the groomer’s cab. It even handles tricky terrain with features like avoidance zones and anchor point searches. This setup doesn’t just make slopes look good; it helps operators work smarter, not harder.
Snow measurement for World Cup Slalom course
For the past two years, Killington Mountain Resort in Vermont has been utilizing the Prinoth Connect Snow Measurement system powered by the Leica MC1 software.
Killington is one of the first resorts in North America to invest in snow measurement, and it has been vital to executing the Women’s Slalom and Giant Slalom World Cup builds in 2023 and 2024. Killington has the snowmaking capability to cover the race trail, Superstar, with snow in about 100 hours. With the software, the teams can read the snow depth to +/- 3 cm, using snow measurement sensors instead of long metal probes. The software helps increase the efficiency of both snowmaking and grooming, making the build easier for the grooming operators, more straightforward for officials, and safer for the racers.

From the snow to the dirt
However, Leica Geosystems machine control technology is a year-round solution thanks to its versatile Leica MC1 platform, which allows the same hardware used for snow grooming to seamlessly transition into off-season applications such as summer earthworks, trail construction and road maintenance. With a single investment, resorts get a multipurpose tool that eliminates the need for separate systems, cutting costs and complexity.
For instance, in the summer months at the Rieberalp in Davos Rinerhorn, the Leica MC1 solution powers excavation work for projects such as creating a reservoir and ensuring precise and efficient earthmoving. In the winter, the same system transitions to snow groomers, optimizing snow management on the slopes. This effortless switch between applications highlights the adaptability and value of the Leica MC1 platform, enabling ski resorts to get the maximum out of their investment while maintaining top performance year-round.
Technology for more sustainable snowparks
With precision snow management and reduced waste, resorts can achieve operational goals while safeguarding the environment. Adopting digital solutions such as these ensures that ski resorts and snowparks can continue to deliver world-class experiences for generations to come.
Trimble
Across digital dimensions on Te Ara Tupua
Te Ara Tupua is an initiative by the New Zealand Transport Agency aimed at enhancing transport resilience while establishing a walking and cycling route between Wellington and Lower Hutt. The Te Ara Tupua Alliance includes the NZ Transport Agency and its design and construction partners: Downer NZ, HEB Construction and Tonkin + Taylor. To execute this project, the NZ Transport Agency is collaborating with Taranaki Whānui ki te Upoko o te Ika and Ngāti Toa Rangatira as iwi mana whenua. This collaboration inspired the name Te Ara Tupua, referencing the Māori creation story in which Ngake and Whātaitai, two tupua (ancient beings), formed Te Whanganui-a-Tara (Wellington harbor).
The Ngā Ūranga ki Pito-One section of Te Ara Tupua will be built on the harbor’s edge, from Ngā Ūranga Interchange to Honiara Te Puni Reserve in Pito-One and connect with the new Pito-One to Melling section. The project will deliver a new resilient coastal edge protecting the road and rail while providing transport options and a safe route for walking and cycling between the two cities.
The solutions involved include:
- Trimble Marine Construction System
- Trimble SketchUp
- Trimble Stratus Software
The benefits of the project include:
- Reduced project timeline.
- Improved safety for construction crews and the public.
- Increased productivity.
- Higher precision placement of embankment blocks.
- Reduced environmental impact.
- Real-time progress visibility for stakeholders.

Te Ara Tupua is currently under construction along the western coastline of Te Whanganui-a-Tara with the aim of being completed in 2026. The Pito-One to Melling section of Te Ara Tupua is the first completed section of the project and was delivered by the contractors, Fulton Hogan.
The Pito-One to Melling section is a 3 km separated cycling route stretching from Pito-One to the Hutt River Trail near Bridge Street. The new path eventually will join the Ngā Ūranga to Pito-One section of Te Ara Tupua, which connects to the Hutt Road and Thorndon Quay.
The construction of Ngā Ūranga to Pito-One section of Te Ara Tupua includes a 4.5 km shared path, shared path bridge, rock revetments, seawalls and landings. To protect the shared path, road and rail line against wave action, erosion and sea-level rise, an essential part of the new pathway is the construction of embankments (or revetments).
Underwater resilience
Te Ara Tupua is the first project where seismic performance has been considered and tested in the design elements, including the new seawall built over a large active faultline.
Two main types of material are required for this project. Rock is being used for the revetment (the sloping rock seawall), which will protect the reclamation and the path from the sea while the remaining material is general fill. These are being sourced in Taranaki and Golden Bay with rock from Golden Bay being transported by barge, greatly reducing the number of truck movements.
XBlocPlus units are a unique cost-effective solution for Te Ara Tupua. These blocks are poured in the shape of an ‘X,’ which interlock and stack on top of each other to create a seawall with a steeper incline.
Using these interlocking concrete blocks reduces the seawall’s physical footprint and impact on the marine environment, enabling the project to use less material at a lower cost compared to a rock revetment.
Through this innovation, the project team of engineers and ecologists (Te Ātiawa, Ngāti Maniapoto, Ngāti Tūwharetoa and Ngāti Apa) worked alongside lead cultural designer, Len Hetet to combine cultural and environmental design, which resulted in Te Ripowai, the unique Te Ara Tupua ecological XblocPlus unit. Te Ripowai speaks of the rippling water and connects to a Te Ātiawa whakatauki of guardianship. The guardians must keep the ripples occurring, else water becomes still and life will cease to exist. Te Riopowai includes surface patterns and textures to encourage growth of marine plants.
The Ngā Ūranga to Pito-One pathway shoreline ultimately will have 6,663 of these blocks of varying shapes.

Block placement
Placing these blocks with precision and speed initially created some concern for the project team. Operators in excavators equipped with grapple attachments needed to move the units into place, initially about 4 m underwater, to a tolerance of about 80 mm to assure embankment strength. To further complicate the construction, there are eight different block shapes.
It’s a task purpose-built for real-time digital twins and machine guidance, according to the Alliance. With help from SITECH, the survey team looked to its digital assets.
First, Jan du Preez, survey manager with the Te Ara Tupua Alliance, relied on Trimble SketchUp to accurately model the individual blocks. Then, the team combined the Trimble Marine Construction (TMC) System with a digital model of the excavator. Laser scans along the shoreline provided a digital record of the existing conditions. Even the sequential placement of the blocks is planned in the digital space.
On the job, an operator selects a designated block for placement on the screen, then uses the excavator grapple attachment to pick it up. TMC provides real-time feedback on the block’s position, rotation and tilt as the operator navigates to the appropriate position, even underwater.
Du Preez added, “With TMC, the operators can ‘see’ where they are placing them under the water. Because they’re working in an active tidal area with most of the blocks sitting underwater, the idea was to make the process as easy as possible for the operator with highly visual markers on the screen. Every step is color coded, which allows operators to just focus on the colors, rather than trying to see underwater with the naked eye.”
As the block is placed within the 80 mm tolerance required to interlock with the blocks above, the operator records the as-built position, and the screen shows green. The operator then releases the grapple and moves on to the next block.
When asked about efficiency, du Preez noted, “The initial program specified placing 15 blocks per day. We are currently placing between 35 to 45 blocks per day depending on site conditions. We estimate that we’re seeing about three times the productivity compared with more conventional methodology — though I’m still not sure how we would have done this without TMC. We would have had to come up with some kind of visual marker and then perform quality checks with divers. It would have been time consuming and very costly.”
Shared progress
The benefits of the digital workflows to stakeholders, according to du Preez, are many, with transparency being the overarching benefit.
Unlike a traditional contract where owner and project team are separate, in an alliance model the client is an integral part of the team. That said, while NZ Transport Agency, Waka Kotahi, et al., are involved in the everyday running of the project as part of the alliance, they also have a board. “Every time the Alliance board of directors sees our solution, they are completely blown away by what we’ve been doing and how we’re doing it,” du Preez said. They particularly like the regular drone flights that capture progress updates.
“All survey data, models and regular flight imagery are loaded and stored in Trimble Stratus for sharing so that stakeholders always see the latest project status. The entire Alliance really appreciates this level of real-time digital visibility into the project.”
Ngā Ūranga ki Pito-One is on track for completion in 2026. When complete, the Te Ara Tupua will deliver a safe, connected and resilient route, enabling more people to walk or bike, and connect with local paths in both Wellington and the Hutt Valley.