GIOVE-B E1 CBOC Signal Quality Assessment
By Matthias Söllner, Christian Kurzhals, Wolfgang Kogler, Stefan Erker, Steffen Thölert , Michael Meurer, Maktar Malik, and Manuela Rapisarda
GIOVE-B has been in orbit for just over one year. How well is it performing? In particular, what can we say about one of GIOVE-B’s pioneering features: its E1 CBOC signal? In this month’s column, we take a detailed look at a particular monitoring and assessment program set up to examine the GIOVE-B signals and discuss some of its initial CBOC results. The successful operation of this program bodes well for its use in future validation campaigns.

THE SECOND GALILEO TEST SATELLITE, GIOVE-B, was launched on April 27, 2008, and began transmitting navigation signals a few days later. It joined its older sibling, GIOVE-A, which was placed in orbit over two years earlier. Standing for Galileo In-Orbit Validation Element, the GIOVE satellites constitute the first in-orbit test phase in the development of the Galileo navigation system.
In addition to securing the frequencies for the system, the satellites are being used to assess key technologies for the full Galileo constellation. The GIOVE test phase will be followed by the In-Orbit Validation (IOV) phase during which four IOV satellites will be launched, two at a time, aboard Soyuz rockets from Europe’s spaceport in French Guiana. Together with a preliminary ground network, the IOV satellites will be used to validate the Galileo system as a whole, using advanced system simulators. The launches are expected to occur by the end of 2010.
But before the IOV phase can begin, a thorough analysis of the performance of the GIOVE satellites must be carried out to minimize any difficulties with the IOV satellites. This includes monitoring and assessing the different signals broadcast by the satellites.
The GIOVE satellites can transmit on all three Galileo frequencies, E5, E6, and E1 (also known as L1) but only on two simultaneously (either E1-E5 or E1-E6). A variety of modulation types can be transmitted on the different frequencies by both satellites to test their use for the different Galileo services to be implemented for the operational constellation. These include alternative binary offset carrier (BOC) and quadrature phase shift keying on E5 and cosine BOC (BOCc) and binary phase shift keying on E6. On E1, the satellites have different capabilities. Although both satellites can transmit BOCc on this frequency, GIOVE-A can additionally transmit a single BOC signal with a subcarrier frequency of 1.023 MHz and a spreading code chipping rate of 1.023 MHz (BOC(1,1) ) whereas GIOVE-B transmits a more versatile multiplexed composite BOC or CBOC, which linearly combines BOC(1,1) and BOC(6,1). The CBOC signal is being transmitted by GIOVE-B to explore its performance, usability, and any possible side effects including its use in receivers designed to track a BOC(1,1) signal.
GIOVE-B has now been in orbit for just over one year. How well is it performing? In particular, what can we say about one of GIOVE-B’s pioneering features: its E1 CBOC signal? In this month’s column, we take a detailed look at a particular monitoring and assessment program set up to examine the GIOVE-B signals and discuss some of its initial CBOC results. The successful operation of this program bodes well for its use in future validation campaigns.
The first measurements of the navigation signals transmitted by the second Galileo test satellite, GIOVE-B, were recorded during the night of May 7, 2008, following the successful launch from Baikonur a little over a week earlier on April 28. During the In-Orbit Test (IOT) phase of the mission, which lasted about three months, a program of intensive measurements was carried out by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt or DLR) and the Astrium subsidiary of the European Aeronautic Defence and Space Company (EADS) using the 30-meter high-gain antenna at Weilheim/Lichtenau, near Munich, Germany. These and follow-on activities were performed under a bilateral agreement between the European Space Agency (ESA) and DLR’s Institute of Communication and Navigation on the exploitation of the GIOVE satellites.
The first measurements indicated that the navigation payload suffered no damage or degradation with regard to power and signal-in-space (SIS) quality during the launch of the satellite. After the successful completion of the IOT phase, the satellite configuration was maintained for long intervals to allow stability and long-term quality assessments within the ESA GIOVE mission activities and to stabilize ground segment operation. DLR and Astrium continued their measurements and analysis on GIOVE-B signals, focusing on modulated power and on modulation and correlation quality. The observation intervals included an eclipse season, when GIOVE-B spends a fraction of its orbit in the Earth’s shadow. Any impact of the corresponding temperature variations on signal transmission characteristics and key navigation parameters was of special interest.
This article focuses on modulated spectral power analysis of GIOVE-B signals for the detection of frequency and elevation-angle-dependent variations in the transmitted signal spectrum and power. Also, a detailed in-phase/quadrature-phase (I/Q) sample analysis is presented, focusing on modulation correctness and correlation distortions. These assessments are based on sample files of a few seconds of navigation signals as received by a calibrated high-gain antenna and recorded with the BayNavTech Signal Experimentation Facility (BaySEF). We have evaluated, in particular, correlation loss and S-curve bias since these parameters are very sensitive to onboard signal distortions although their reliable evaluation is quite challenging. In this article, we concentrate on the analyses of the E1 composite binary offset carrier (CBOC) modulation.
We discuss the GIOVE-B measurement and evaluation parameter results from the initial IOT phase and from later phases, including those from an eclipse period. This comparison of measurement results — spread over the first year of operations — demonstrates the excellent stability of signal power, modulation, and correlation quality of the GIOVE-B signals.
GIOVE-B E1 Signal
GIOVE-B can transmit navigation signals either simultaneously in the Galileo E5 and E1 bands or in the E6 and E1 bands. At E1, with a center frequency of 1575.42 MHz, GIOVE-B transmits three signal components called E1-A, E1-B, and E1-C. The E1-A signal has a BOCcos(15,2.5) modulation, with 2.5575 MHz code chip-rate and a binary cosine-type subcarrier modulation of 15.345 MHz. The B- and C-components have CBOC(1,6,1,10/1) modulation. Within this type of multiplexed BOC implementation, the code chips are provided at a constant rate of 1.023 MHz, modulated with a composite quaternary subcarrier with rates of 1.023 and 6.138 MHz. The latter part, called the BOC(6,1) subcarrier, has a relative power of 1/11 and is added to the BOC(1,1) binary subcarrier in CBOC-B and subtracted for CBOC-C. From the beginning of May 2008 until July 2009, GIOVE-B transmitted signals 96.8% of the time. Considering the experimental nature of the satellite, this represents a very successful operation.
Signal Quality and Relevance
In GNSS operations, signal quality assessment generally refers to the behavior of the navigation signals as transmitted from individual satellites. In this article, we assess two major aspects: the transmitted signal power and the frequency-transfer distortions of the satellite relative to the ideal signal definitions.
Why should we consider these aspects in particular? For transmitted signal power, the answer is obvious. In addition to proof of compliance with regulatory declarations, verification and monitoring of signal power is relevant for the system provider to commit to certain navigation service performance.
Concerning frequency-transfer distortions, the answer may be less obvious. The relevance is obtained via the impact of distortions on a receiver’s correlation function. First, the available maximum correlation power for a receiver binary replica may be affected. This is due to changes in the power sharing of the signal components within the complete signal and due to reduced matching of distorted transmitted signals with the ideal receiver replica. Second, the shape of the correlation function may suffer from asymmetric distortions, leading to receiver-dependent biases in the discriminator lock point. The most relevant receiver parameters are the input bandwidth and the discriminator type, especially the discriminator spacing (early-late spacing). With respect to this, user receivers and receivers in the control system ground segment (used to derive the satellite orbit and clock parameters) may differ. This leads not only to timing but also to positioning errors, if the distortions are different for different satellites.
These are the main reasons why we need to analyze and control the corresponding distortions for the Galileo system.
For an accurate assessment of transmitted signal power and frequency distortions, we had to obtain measurements with a highly directive antenna. This is essential in order to lift the instantaneous signal far above the noise floor and to avoid environmental distortions from interference as well as multipath.
But why don’t we consider also other aspects of signal quality such as the correctness of the navigation message or the stability of hardware delays and clocks? Because measurements with the highly directive antenna are not so appropriate for an assessment of these parameters. Instead, continuous monitoring over weeks or longer is preferred, based on measurements from a network of distributed navigation receivers. Such monitoring likely will be discussed in other publications.

Evaluation Parameters
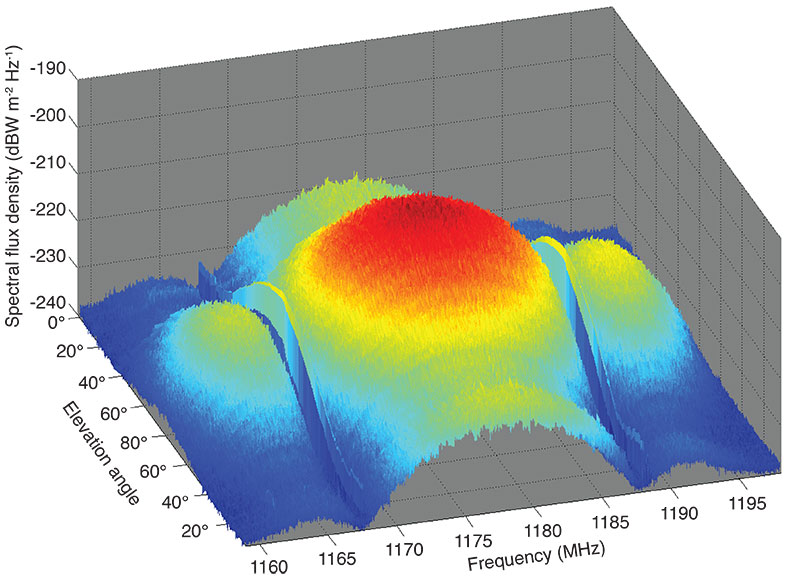
For the assessment of the satellite’s radiated power in the individual navigation bands, absolute calibrated spectral measurements are evaluated for spectral flux densities integrated over frequency. These parameters provide a first insight into spectral asymmetries and variations over time.
Other parameters are used to evaluate the distortions in the instantaneous transfer characteristics of the satellite. They are derived from wide-band recorded baseband-signal samples of up to a few seconds duration.
Initially, we consider the I/Q probability density of the signal after Doppler frequency shift removal, well known from communication system analysis as scatter plots. Secondly, as introduced in the previous section, we want to quantify the impact of transfer distortions on the navigation performance obtained for ideal navigation receivers. The corresponding acquisition and tracking performance is based on the correlation function.
We define the normalized correlation function with respect to ideal receiver properties in order to separate the satellite transmit distortions of interest from receiver distortions according to the following equation:

with
- the preprocessed baseband signal, SBB-PreProc, with down-converted nominal center frequency, full Doppler removal, and brick-wall-filtered to a bandwidth of interest;
- the reference-signal, SRef, providing the ideal binary (or, for CBOC, quaternary) baseband receiver replica signal;
- the integration period, Tp, often corresponding to the primary code period of the reference signal under consideration.
From this normalized correlation function, we can derive the primary relevant navigation parameters, which are, as previously mentioned:
- correlation loss
- early-late spacing dependency of the code-loop-discriminator lock point and S-curve bias.

Correlation Loss. For a given (distorted) signal, the correlation loss (CL) quantifies the loss in correlator output power relative to an ideal signal. This can be formulated by
![]()
where
![]()
It should be noted that the ideal baseband signal here is the multiplexed signal including all signal components, also band limited with a brick-wall filter to the bandwidth of interest.
S-Curve Bias. The navigation receiver obtains the (noiseless) code delay by following the zero crossing of the code discriminator. The output as a function of delay resembles the letter “S” or its reflection and is called the S-curve. For asymmetric distortions in the correlation function, it turns out that different code-tracking loops may have different lock points, as illustrated in FIGURE 1 for an arbitrary example.
To quantify this effect with a reasonable compromise between parameter complexity and practical value, a non-coherent (early minus late) power discriminator is considered over a wide range of early-late spacings, . This refers to the code discriminator of
with its lock point, ![]() , defined by
, defined by
![]() .
.
Then, the spreading of the lock point is the S-curve bias, SCB, given by
![]() ,
,
considering all δ in the range [0, δmax], with
Those interested in additional candidate signal-quality parameters, more detailed descriptions, or a theoretical analysis of the impact of satellite distortions on navigation performance parameters should consult the paper “GNSS Offline Signal Quality Assessment” listed in Further Reading.

Weilheim Measurement Setup
As previously mentioned, for accurate measurements of the various signal-quality parameters, the signal needs to be lifted above the noise and multipath, and any interference needs to be suppressed considerably. Moreover, as the signal quality from the satellite needs to be assessed separately, any measurement-system transfer distortions need to be calibrated out as much as possible.
That’s why DLR installed a measurement and calibration system at their 30-meter high-gain dish antenna at Weilheim for GIOVE signal performance measurements. This measurement setup was completed for high capacity signal recording with one rack of the BaySEF equipment in cooperation with EADS Astrium.
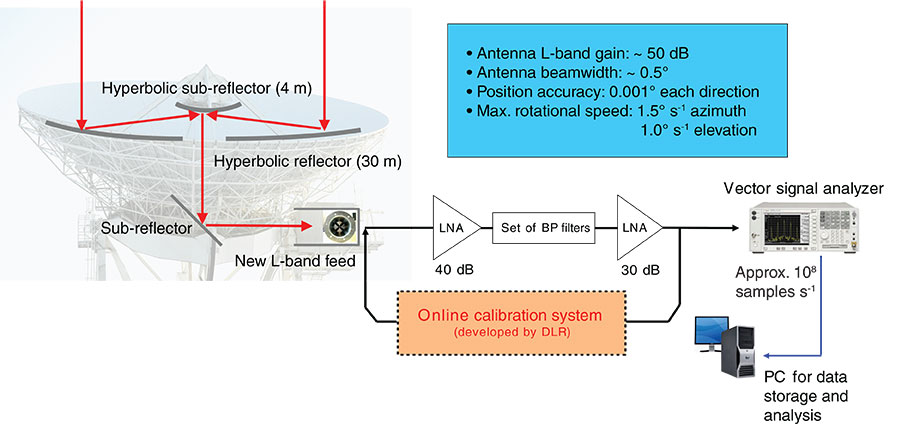
The 30-meter antenna, as shown in the opening graphic, is the main core of this verification facility. This antenna is based on a shaped Cassegrain system with elevation over azimuth mount, with higher than 50-dB gain and a beam width around 0.5° at L-band. The absolute position accuracy of this antenna is 0.001° in each direction. The signals are directed from the parabolic main reflector to the measurement cabin via a hyperbolic sub-reflector, a waveguide, and a second flat sub-reflector. One big benefit of this construction is the direct access to the installed feed in the cabin and the possibility to place the complete measurement equipment next to the feed, avoiding long connection cables.
The signals are recorded with BaySEF and for individual frequency bands (selected by switchable band pass filters) and also with a vector signal analyzer (VSA) of at least 80 MHz bandwidth. Moreover, a signal with up to 300 MHz bandwidth can be recorded with a digital oscilloscope, if the VSA is used for down conversion. Interfaces to other measurement equipment, such as navigation receivers, have already been prepared for future extension. The whole setup is referenced to a highly stable cesium frequency standard. We essentially use the BaySEF equipment as a high-capacity multiband bit grabber in this setup.

The main BaySEF applications are the verification and monitoring of GNSS SIS and support for the design of applications based on parametric software-receiver evaluations. The key features most relevant for the signal-quality assessment discussion of this article are:
- Simultaneous processing (down conversion, etc.) and synchronized recording of up to four frequency bands;
- 3-dB RF bandwidth of more than 100 MHz at E5 and more than 50 MHz in other bands (E5a, E5b, L2, E6, E1);
- Maximum recording capacity of 120 megabytes per second per frequency band;
- Flexible decimation and quantization;
- Recording capacity of 0.6 terabytes per frequency band, corresponding to more than 80 minutes at the maximum recording rate;
- Remote control of data acquisition from, for example, the EADS Astrium premises in Ottobrunn.



Measurement Calibration
Accurate system calibration is the key to reliable signal quality measurements. To achieve a combined absolute measurement uncertainty significantly less than 1.0 dB (required for EIRP assessments), it is essential to calibrate precisely every used part of the system. In addition to all RF components of the receiving system, this also includes the high-gain antenna itself.
For the characterization of the high-gain antenna, two values are assessed: antenna pointing accuracy and gain. A pointing offset of about 0.04° was measured exactly with a known L-band pilot signal from the Artemis satellite and corrected in the antenna control. For gain characterization over the complete L-band frequency range of interest, the radio “star” Cassiopeia A is used. Cas A (actually a supernova remnant) is one of the strongest wide-band radio emitters in the northern hemisphere. With the help of the well-known flux density of Cas A, the gain-to-noise-temperature ratio (G/T) can be measured. After precise determination of the system noise temperature, T, the antenna gain, G, itself can be found.
For online calibration of absolute gain drifts in the measurement system, a frequency-and-power-stabilized signal generator is used in combination with two power meters.
The relative frequency transfer distortions of the receiving system are calibrated with two techniques. A network analyzer periodically provides precise measurements of gain and phase of the RF path from the antenna feed to the measurement devices.
To include also down-converting measurement devices such as the BaySEF, the injection of wide-band calibration signals is used, and simultaneously measured with a commercial digitizer (VSA).
The desired in-band measurement system transfer characteristic (relative to the VSA-characteristic, which is assumed to be ideal) is then extracted by means of de-convolving the calibration signal sampled by the device to be calibrated with the VSA-sampled reference signal.
Corresponding transfer characteristics obtained for the RF path (from network analysis) and for the BaySEF (from wide-band calibration signals) were combined to derive the equalization filter applied in post-processing the recorded samples.
Power Measurement Results
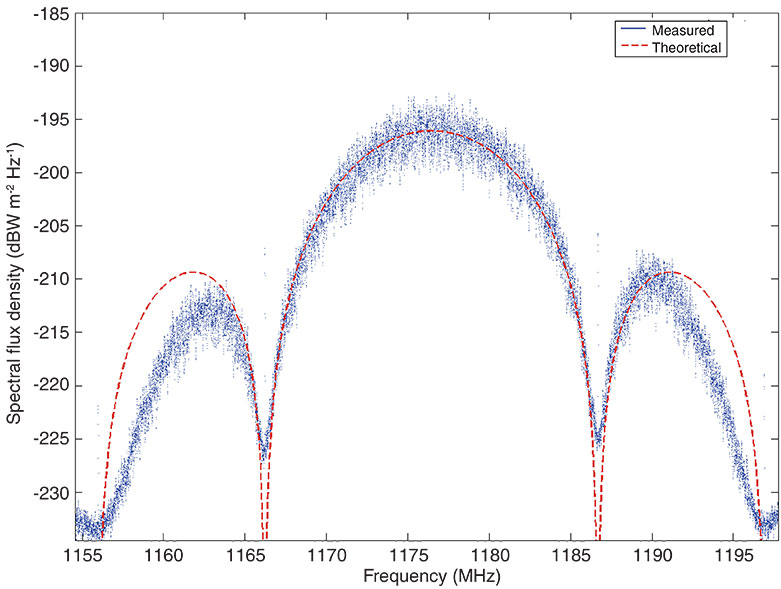
For analysis of the transmitted signal power of the GIOVE-B E1 CBOC and its variation, we have recorded a large number of spectral measurements over single satellite passes. A typical example of a single power spectral density measurement — here normalized to unit power — is shown in FIGURE 2, overlaid on the ideal spectral envelope. After absolute power calibration, we integrate the spectral power flux density over a reference bandwidth of 40.92 MHz and over the individual main lobes of the BOC(1,1) and BOCc(15,2.5) components, as illustrated in Figure 2. This procedure is used to detect the variation of transmitted signal power and possible signal asymmetries over time.
Parameter results are shown first for an early satellite pass during the IOT campaign on May 11, 2008 in FIGURE 3. Main variations in this figure are as typically expected from the cut of the measurement pass through the satellite antenna pattern. Also, the overall main-lobe power of the BOC(1,1) and the BOCc(15,2.5) components are similar, but with a strong asymmetry between upper and lower main-lobe power of the BOCc(15,2.5) component.
A closer look at the time-dependency of this asymmetry is given in FIGURE 4, showing a stable low power difference of about 0.2 dB between the BOC(1,1) main lobes and a mean power difference of 0.8 dB between the BOCc(15,2.5) main lobe with ±0.2 dB variations over time.
The second record was captured more than a year later, with similar results as shown in FIGURE 5, which indicate a stable transmission power. Only the mean main-lobe asymmetry of the BOCc(15,2.5) signal, as shown in FIGURE 6, is slightly smaller and with a different shape in its time-dependency. The measurement passes surely provided different cuts through the satellite antenna pattern. Therefore, we assume that these variations mainly indicate some antenna-pattern frequency dependency, as will be emphasized also in the following signal quality measurement results. For precise characterization, measurements and evaluations for many more satellite passes would be required.



Signal Quality Results
In this section, we will show some GIOVE-B E1 signal quality results as obtained from BaySEF measurement data collected at Weilheim. The results presented are from two passes with the satellite in E1 CBOC-transmission mode:
- May 9, 2008, a few days after the signals were switched on
- September 29, 2008, a pass when the satellite was in eclipse for one hour.
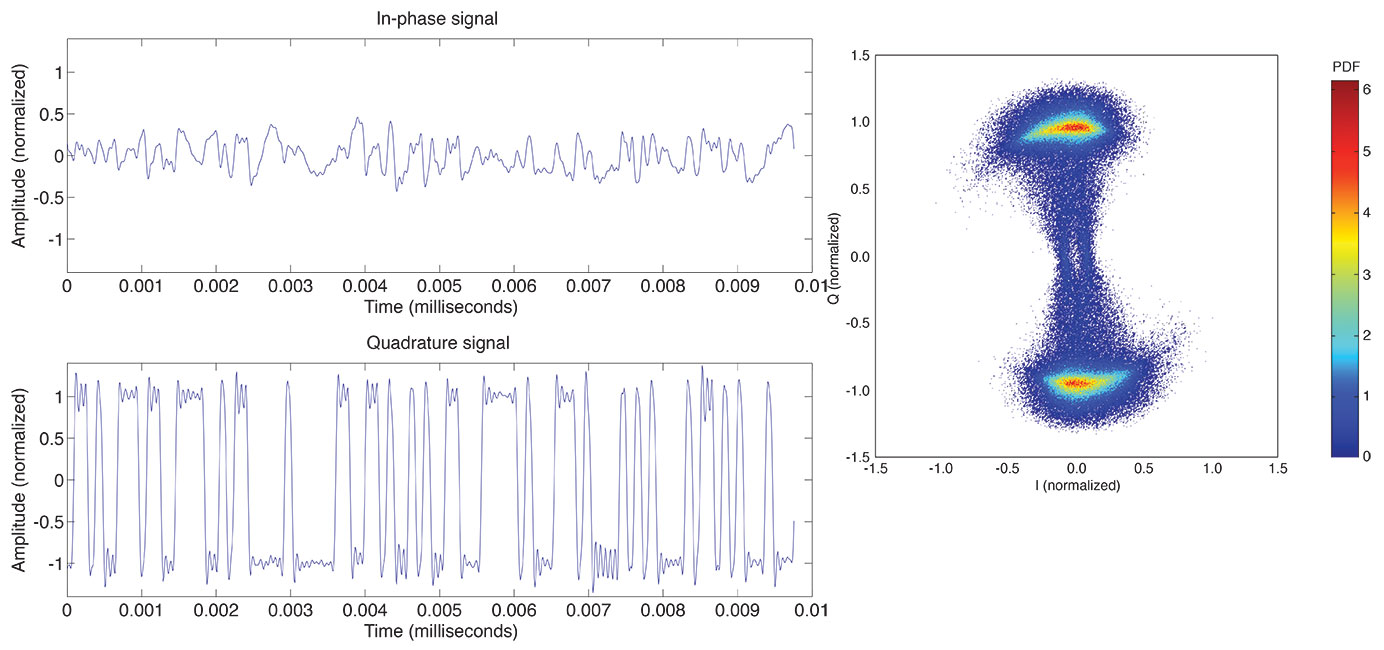
The modulation type of the E1 signal can be seen from the scatter plot, shown in Figure 7, which is derived from about 50 millisecond-signal-samples after Doppler removal. The overlay, with the eight phase points of the ideal constant envelope signal, allows clear identification of the interplexed CBOC signal. Due to bandwidth limitation, distortions, and noise jitter, the individual phase states have been enlarged, and transition traces become visible. Also, the symmetry of phase states becomes slightly deformed. How much this affects measurable navigation performance is not directly obvious from such a plot.
A better indicator of navigation performance is the E1 interplex CBOC correlation function shapes as shown in FIGURE 8 (CBOC-B and -C) and FIGURE 9 (BOCc(15,2.5)), respectively. As for all the following evaluations, the E1 signals were brick-wall band-limited to 40.92 MHz (40 × 1.023 MHz), which was the performance bandwidth of interest, and up-sampled to a rate of 575 MHz. The differences in shapes are not due to distortions but due to different signs of the BOC(6,1) subcarrier in the B and C channels. Note the imaginary part due to signal distortions has been amplified 10 times to stress its presence.
For the shape of the BOCc(15,2.5) correlation function, a small asymmetry in the real part is visible when compared to the ideal band-limited autocorrelation function. This signal distortion effect might be relevant, leading to a higher chance for false lock in acquisition and tracking. However, current receivers have no problems in tracking these signals.
A direct visual assessment of these shapes does not allow us to draw many conclusions. More quantitative evaluations provide the performance parameters of correlation-loss and lock-point-bias behavior.
Example results of the correlation-power evaluation for the GIOVE-B CBOC-B signal component are shown in FIGURE 10, with the red curve showing the correlation power of succeeding code periods relative to the total signal (which also includes the CBOC-C and BOCc(15,2.5) signal components). A curve of similar shape, shown in blue, is obtained for the ideal reconstructed signal using the specified codes and actual data bits of all components synchronized to the input signal. Obviously, the strong jitter of more than 0.1 dB is due to code cross-correlations. The correlation loss is obtained by taking the difference (see Figure 10b), which has a much lower variation with a maximum value of about 0.02 dB. This variation is still dominated by residual distortion differences of the code-cross-correlation values of the GIOVE-B codes as can be seen when accounting for the fact that equally colored dots in the figure correspond to equal code cross-correlations. Despite the variation, the negative loss is remarkable. This corresponds to a gain in usable signal power relative to the ideal case and is due to a stronger bandwidth limitation. This analysis indicates that the signal power of the wide-band signal component, BOCc(15,2.5), is more strongly reduced than for the narrow-band CBOC component, providing effectively a gain in relative correlation power for CBOC.
Next, we consider the lock-point bias of a noncoherent power discriminator as a function of early-late spacing (over the relevant range) for the CBOC-C signal component in FIGURE 11, evaluated for about 60 succeeding code periods. Again, different colors indicate different code-cross-correlation values. The corresponding S-curve bias is obtained by evaluating the peak-to-peak variation of this lock-point bias and is shown in FIGURE 12. Over this short period of 0.5 seconds, a quite stable value of about 1325 picoseconds is obtained with only 25 picosecond standard deviation mainly due to residual code-cross-correlation effects and residual noise.

It should be noted that all evaluation results include not only the satellite distortions but, in general, measurement distortion contributions. In fact, accurate measurement system calibration is one of the most critical issues for exact signal quality assessment of satellite transfer characteristics.
Mutual evidence of successful calibration is gained from the fact that similar results for correlation loss and S-curve bias of the CBOC-signal components have been obtained from measurements carried out by ESA together with Surrey Satellite Technology and the Science and Technology Facilities Council at the Chilbolton Observatory near Andover, England. However, even for the same measurement periods and perfect calibration, identical results may not be expected, as will be discussed here.

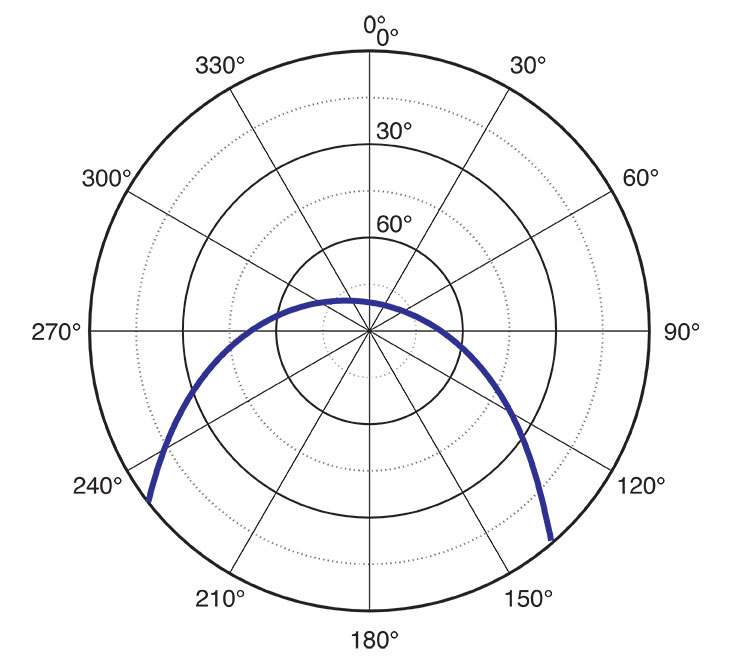
In addition to the signal-quality assessment of individual snapshot measurements, variation over observation direction and over time is of major relevance. Therefore, these evaluations have been performed for many snapshots of two single passes almost five months apart. The passes and measurement points mapped to the directions as seen from a satellite-antenna-fixed coordinate system are shown in Figure 13.
In FIGURE 14, the results of correlation loss and S-curve bias are shown for both passes mapped to the satellite antenna off-axis angle. For a monotonic x-axis, a sign was added to this angle here, with negative values for the ascending part of the pass and positive values for the descending part as seen from Weilheim.


The correlation-loss results for both passes vary about ±0.1 dB around 0.7 dB for BOCc(15,2.5), around -0.5 dB for CBOC-C and around -0.55 dB for CBOC-B. Also, the measured S-curve-bias results are in the same range for both passes, which is about ±100-200 picoseconds around 1200 picoseconds for CBOC-B and CBOC-C and ±2 picoseconds around 23 picoseconds for BOCc(15,2.5). Furthermore, these plots show smooth variations over the antenna off-axis angle, obviously also with some azimuth dependency due to the different shapes for each pass. It is remarkable that the relative shapes of the correlation-loss and S-curve-bias plots are so similar.
Even if measurement system instability may be a contributing factor, most of the variations are thought to be due to the directional dependency of the satellite antenna pattern. See also the similarity of results from both passes at the one end of the high off-axis angles, corresponding to similar azimuth angles. These results indicate that for full characterization of signal quality over the satellite antenna pattern, further well-calibrated measurements over several passes would be required.
During the measurement pass of September 29, 2008, a few measurement points were taken when the satellite was in eclipse. Corresponding results marked by black points in the figures show almost no impact of the eclipse on correlation loss and S-curve bias. Further measurements and evaluations would be required to confirm finally that the larger changes afterwards are not due to the eclipse.
Conclusions
This article described some of the GIOVE-B navigation SIS performance characterizations carried out by DLR and EADS Astrium in collaboration with ESA during the past year. These characterizations were achieved using a very accurate measurement system, calibrated in absolute power, relative amplitude, and phase over several frequency bands. For this purpose, several calibration approaches have been adopted and are still being optimized.
The similarity of results from measurements spaced several months apart indicates excellent long-term stability of the considered characteristics. Also, it has been demonstrated that a satellite-eclipse period seems not to affect modulation and correlation quality in a relevant manner.
As expected and already known from previous work, the satellite provides some frequency-dependent directional variations in its transmitted signal power characteristics, which also affects signal quality.
During the described campaign, the observed variations can be considered as moderate. A continuation of the monitoring activity is under consideration, to further improve the coverage of the characterizations.
During these GIOVE-B measurements and evaluations, all involved teams gained considerable experience in accurate characterization of the navigation signals transmitted from the satellite, and the operation of instruments and signal evaluation was thoroughly verified and cross-validated. The knowledge and experience gained will be very useful for future navigation satellite validation campaigns.
Acknowledgments
We would like to thank DLR’s German Space Operations Center for use of the Weilheim antenna and the colleagues who operate and maintain it. BaySEF is part of the BayNavTech program, which is supported by the Bavarian Government (Ministry for Economic Affairs, Infrastructure, Transport and Technology). The activity reported in this article was performed under a bilateral agreement between ESA and DLR’s Institute of Communication and Navigation on the exploitation of GIOVE satellites and the GIOVE signal-quality-characterization effort has been supported by ESA. This article is based on the paper “One Year in Orbit – GIOVE-B Signal Quality Assessment from Launch to Now” presented at the European Navigation Conference GNSS 2009, held in Naples, Italy, May 3–6, 2009.
Manufacturers
Measurement equipment included a Rohde & Schwarz GmbH & Co. KG (www.rohde-schwarz.com) FSQ26 vector signal analyzer. The EADS Astrium facility did not use commercial receivers to capture the GIOVE-B signals discussed in this article.
MATTHIAS SÖLLNER is senior expert on navigation signal engineering. CHRISTIAN KURZHALS and WOLFGANG KOGLER are navigation signal engineers focusing on payload aspects and performance verification, respectively. All are working at the Astrium GmbH subsidiary of the European Aeronautic Defence and Space Company N.V. (EADS).
STEFAN ERKER and STEFFEN THÖLERT work on GNSS validation and signal analysis at the German Aerospace Centre in Oberpfaffenhof-en with MICHAEL MEURER, who is responsible for performance issues concerning the Galileo system.
MAKTAR MALIK is the payload system manager for GIOVE-B at the European Space Research and Technology Centre in Noordwijk, The Netherlands, where he works with MANUELA RAPISARDA, who is a radio navigation engineer providing system support to the Galileo Project Office.
Further Reading: Click here for references related to this article.