The Bellagio Hotel & Casino in Las Vegas, Nevada. Photo credit: Photographersnature.
Qualcomm and Cisco Collaborate to Improve Indoor Navigation
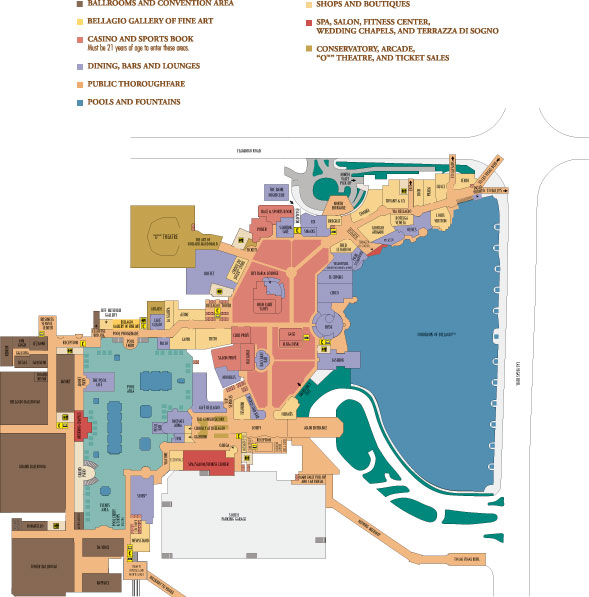
Las Vegas — home of gambling, shows, and massive hotel/entertainment/resort complexes. It’s not always easy to find what you’re looking for amid miles and miles of indoor floorspace.
Previous Bellagio visitors had to rely on a static map to find their way around the massive Bellagio resort.
In May, Qualcomm Atheros and Cisco showcased its collaboration to enhance indoor location services at a customer deployment at the Bellagio Resort and Casino in Las Vegas. The event took place in cooperation with MGM Resorts International during the Interop information technology conference. Participants had the opportunity to try out Qualcomm and Cisco’s approach to indoor location services, which uses the Qualcomm IZat indoor location platform with Cisco’s Connected Mobile Experience. According to the companies, the combination improves location accuracy and allows users to discover services with context awareness in sprawling retail, travel, and hospitality venues, such as Las Vegas resorts.
The companies began their collaboration in November 2012. The Bellagio mobile app, available for iOS and Android, is now offered as a free download for guests using their smartphones, tablets, and other mobile devices.
At the Interop event, participants were given Samsung devices with Qualcomm IZat software, which tracked their position within the Bellagio on a map as they moved through the hotel — a definite advantage over less-advanced apps which only provide a static map.
Based on the person’s location, the mobile app provides recommendations of nearby services such as restaurants, shows, spa services, and bars and lounges on the property. Guests can become a loyalty member and be alerted to discounts at local restaurants, shops, and wine bars. “This creates a truly unique mobile experience for guests and visitors, putting all the amenities of indoor-location-enabled spaces at their fingertips,” according to Cisco.
Event participants pick up Samsung phones equipped with the Bellagio app.
Qualcomm Atheros, which is Qualcomm Technologies’ networking and connectivity subsidiary, recently enhanced its IZat location platform to enable more precise positioning (within 3–5 meters) inside buildings to make indoor positioning more useful to consumers.
The Cisco Connected Mobile Experience offers a Wi-Fi Passpoint (HotSpot 2.0) solution to integrate indoor location and real-time analytic technologies to deliver personalized mobile services and content. The solution is built upon the Cisco Mobility Services Engine, which uses the Bellagio’s existing wireless access-point infrastructure to determine indoor location for mobile devices. Cisco worked with MGM Resorts’ service provider Mobilitie and its partner Meridian to link the mobile app, context-aware services, and wireless connectivity experience together.
The solution is designed to help app developers deploy mobile applications and services that engage the customer more effectively, the companies said.
I have a seven-year-old drawing of GPS satellites in their orbital planes that I found (can’t recall where) some years ago, either on a website or from a colleague who attended some GPS forum. Would you know of a site where I can find current information on GPS satellite locations, which ones have been decommissioned, and which ones have been replaced?
— Grace Pazos
Richard Langley replies:
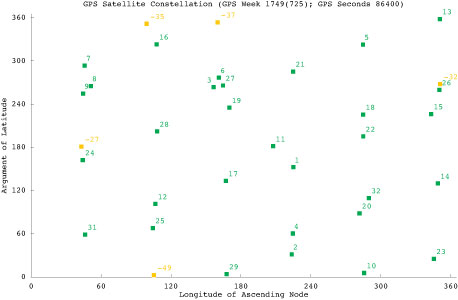
I don’t know of a plot that shows the locations of all decommissioned and/or replaced satellites (some of them would have been boosted out of the GPS orbit planes), but relatively current information on the active and backup satellites can be found here, and a plot here (and depicted below). I update the table and plot roughly every six months. Earlier versions are available on request.
Constellation snapshot for a specific date/time: GPS week 1749 (725) and GPS seconds 86400 = July 15, 2013, at midnight GPS Time.
Survey Scene Newsletter Mail
Thanks for the insightful update on the ESRI User Conference and the Survey Summit. For those of us who can’t afford to travel, it helps to get the scoop on these events. It is interesting to me that the push towards the future includes heavy emphasis on lighter and simpler small platform apps, cloud-based GIS, and 3D visualizations, and less emphasis on the building blocks of geodesy, cadastral data, and surveying. It almost seems like the GIS community is pushing the hard stuff under the rug and focusing on what is new and shiny. And doing this while talking about higher quality standards.
Keep up the good work, thank you.
— David Scherf, Manager of GIS/Technical Services, Torrington, Connecticut
Eric Gakstatter replies:
Thanks for the comments. If you’ve followed my series “Nightmare on GIS Street,” you’ll see that I’m trying to raise awareness of the importance of geodesy in GIS. I don’t believe that most people are sweeping this subject under the rug because it’s a difficult subject, but just that they aren’t aware that it’s a problem. Secondly, if they do recognize the problem, many don’t know how to solve it. There’s definitely a knowledge gap, and an opportunity for geodesists (or qualified surveyors) to contribute.
Defense PNT Newsletter Mail
Thank you for your tribute to Col. Duke Kane’s many contributions beyond the GPS community. I was also sad to hear of his passing. I met Duke in the late 1980s and watched with considerable interest as he established the GPS International Association.
He felt strongly that the GPS users needed their own forum to voice user interests similar to that which had recently been established for GPS industry via the U.S. GPS Industry Council. His foresight and energy will be missed.
— Jules McNeff, Overlook Systems Technologies, Inc., Vienna, Virginia
Don Jewell replies:
Thanks for your kind words. Of course you and I knew Duke well, and you are correct, he made many significant contributions beyond GPS, even though it was a major accomplishment in which he was always very proud to have had a role to play.
Duke Kane was my uncle, and I can tell you the germinal event that grabbed his interest in flight. While a young boy, Duke and my father Jack (Duke’s older brother) pooled their resources and bought a very popular adolescent novel by Nordoff and Hall (these authors also wrote Mutiny on the Bounty) called Falcons of France, written about two young American boys who volunteered to fly for France in World War I before the United States entered the conflict. Duke’s eyes were set skyward ever after.
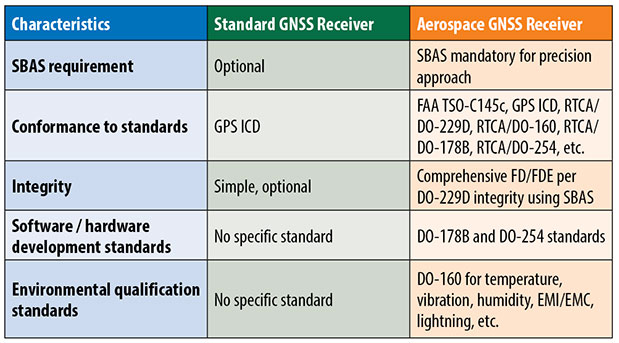
Aerospace GNSS receivers constitute a class apart, compared to their more popular relatives used in automotive, cell phone, or survey applications. Automotive and cell-phone receivers can sometimes provide position information even in indoor environments. The survey class of receivers provides centimeter-level accuracies. However, neither group can guarantee the reliability and integrity of the position solution, and users rely upon them at their own risk, and only in non-critical applications.
On the other hand, an aerospace GNSS receiver not only provides decimeter-level accuracy, but it also guarantees that the position error is bounded by an integrity limit. The probability that the position error is more than the integrity limit is very rare: one in ten million times.
Now, isn’t that the best class of GNSS receiver?
A certified aerospace GNSS receiver stands as the keystone of the Federal Aviation Administration’s (FAA’s) ambitious NextGen Aviation program for the United States. The FAA developed NextGen to revolutionize the way an aircraft flies in the U.S airspace. In its June 2013 update report, the FAA states that “NextGen is providing major benefits to the general aviation community. The Wide-Area Augmentation System (WAAS) has improved general aviation access to more than 1,500 airports in all kinds of weather with no costly investment in ground infrastructure.”
According to the report, by the end of the NextGen mid-term in 2020, NextGen improvements will reduce delays by 41 percent from today. The FAA estimates that by 2018, NextGen will reduce aviation fuel consumption by 1.4 billion gallons, reduce emissions by 14 million tons, and save $23 billion in costs. NextGen also has an important safety impact for air travelers.
Tens of thousands of aircraft are already equipped with WAAS receivers, which improve the availability, accuracy, and integrity of GPS signals. Pilots take advantage of WAAS technology to fly approach procedures using Localizer Performance with Vertical Guidance (LPV) to altitudes as low as 200 feet. The FAA has published 3,123 WAAS LPV approaches as of May 2013 and expects to publish 5,218 by 2016.
The key to NextGen is the aerospace GPS-SBAS receiver.
How different are aerospace GNSS receivers from commercially available receivers, including high-precision receivers?
An aerospace GPS-SBAS receiver is characterized by very high reliability, accuracy, and availability. Among these attributes, the reliability factor is the most important parameter. Misleading information from an aerospace receiver should be extremely improbable, since that can lead to hazardous or severe major consequences to the aircraft, its passengers, and flight crew.
Table 1 shows the major differences between a standard GNSS receiver and an aerospace GNSS receiver.
Table 1. Differences between a standard GNSS receiver and an aerospace GNSS receiver.
Performance Requirements
The DO-229D standard document — formally, the RTCA Minimum Operational Performance Standards for GPS/WAAS Airborne Equipment — specifies the minimum performance standards of an aerospace GPS-SBAS receiver. In particular, an aerospace GNSS receiver needs to meet the GPS and SBAS signal processing requirements, GPS and SBAS data/message processing requirements, satellite integrity status requirement, accuracy requirements in presence of interference, dynamic range and sensitivity requirements, and so on, as defined in DO-229D standard.
Most importantly, the receiver must meet the Receiver Autonomous Integrity Monitoring (RAIM) requirements for en-route, terminal, non-precision and precision phases of flight of DO-229D. Additionally, the receiver must meet the fault detection, fault exclusion, missed alert, false alert, step detection, ramp detection, and other integrity-related requirements of DO-229D.
Further, the receiver needs to meet the environmental conditions specified in DO-160 standard for temperature, temperature variation, altitude, humidity, shock, vibration, magnetic effects, voltage spike, EMI/EMC, lightning, and so on.
Safety and Reliability Aspects
A Functional Hazard Assessment (FHA) based on the intended function of the GPS-SBAS receiver software needs to be carried out to determine whether the receiver meets the requirements of hazardously misleading information. The safety and reliability aspects of the receiver are computed through Failure Mode and Effect Analysis (FMEA) and Fault Tree Analysis (FTA). The effects of each failure mode are determined at the system level for each operating mode of the equipment.
RAIM. For an aerospace GPS-SBAS receiver, RAIM is of paramount importance. The measure of protection provided by RAIM is given by Horizontal/Vertical Protection Limits (HPL/VPL). HPL is used as the protection limit for en-route, terminal, and LNAV (Non-precision approach) phases of flight and compared against the Horizontal Alert Limit (HAL) for the phase of flight. Whereas, VPL is compared against the Vertical Alert Limit (VAL) for the LNAV/VNAV and LP/LPV phase of flight.
The most critical part of the integrity requirement is to detect a satellite failure and, if possible, to make corrective actions in addition to generating timely alerts. A Failure Detection and Exclusion algorithm, often known as FD/FDE, is to be implemented in an aerospace GNSS receiver. The effectiveness of the FD/FDE algorithm has to be tested extensively in off-line condition for availability of satellite failure detection and exclusion. Further, the algorithm has to be tested in on-line conditions as well as on a target environment. There has to be a match among the off-line,
on-line, and on-target test results for using the algorithm in
the GNSS receiver.
The integrity tests on an aerospace GNSS receiver are carried out as per the guidelines in DO-229D. This requires simulation of the GPS orbit and determination of satellite visibility at more than two thousands grid points on the Earth surface and for 12 hours at 5-minute time intervals. The FD/FDE algorithm is validated at each space-time point to determine the availability of failure detection and exclusion.
For the non-precision approach, the space-time points are arranged in terms of the HPL values and Horizontal Exclusion Limit (HEL) values and the most difficult to detect/exclude satellite is identified. Extensive Monte Carlo simulations are carried out at the selected space-time points to validate the false alert and missed alert requirements of DO-229D standard. Similar tests are carried out on the GNSS receiver for the precision approach, wherein the VPL values are considered instead of HPL values. Further, the test results of the off-line tests are validated through comprehensive on-line and on-target tests on the selected space-time points.
Certification Aspects
To ensure that the software and the firmware of the aerospace GNSS receiver are robust, providing adequate levels of safety and reliability, the receiver software and firmware need to be developed conforming to the software and hardware design assurance standards — DO-178B and DO-254 respectively. Based on the criticality of the end application, the design assurance should meet DO-178B and DO-254 objectives of Level A, B, or C criticality.
An aerospace GNSS receiver needs to be certified by the FAA (or other competent authorities in other countries) for airworthiness. The FAA gets involved in the certification process right from the planning stage and oversees the compliance of the entire development process as per DO-178B and DO-254 standards. The aerospace GNSS receiver software and firmware undergo extensive verification and validation processes. Further, the GNSS receiver is subjected to all the functional and environmental tests as per DO-229D and DO-160 standards respectively under FAA supervision. Only after the successful completion of all the software, hardware, and systems tests, the receiver is certified by the FAA for airworthiness through Technical Standard Order TSO-C145 Authorization (TSOA).
Conclusion
Aerospace GNSS receivers, by virtue of their inherent safety, reliability, and integrity, are far more suitable for critical applications, where an error could have hazardous or catastrophic consequences. These receivers must be used in commercial transport aircraft, business jets, general aviation aircraft, gliders, experimental aircraft, balloon, and so on. Further, in airport surface vehicles and mass-transport vehicles such as high-speed trains, trams, and unmanned autonomous vehicles of all sorts, whether ground or air, receivers similar to aerospace GNSS receivers should be used for navigation and surveillance purposes.
Jaynata Ray received his Ph.D. from the University of Calgary. He has worked in the GPS field since 1992, and is group manager at Accord Software and Systems in Bangalore, India. He is a member of GPS World’s Editorial Advisory Board.
Perspectives from a senior technical specialist and a production engineer at Newmont Boddington Gold Mine.
Newmont Fleet Management Services now continually monitors and plots the performance of JPS Locata alongside traditional GNSS in an effort to fine-tune the installed infrastructure. Learning to sculpt the perfect network continues as we move our JPS LocataLite transmitters to accommodate an ever-changing and expanding pit design.
Large twelve-meter benches and an aggressive mining plan have seen both North Pit and South Pit at NBG rapidly increase in depth, bringing the problems associated with GPS coverage in a deep-pit environment.
As mine sites develop and evolve, for the first time ever, we have the ability to dictate and control which areas we direct our own positioning coverage, and guarantee we can sustain accurate high-precision navigation wherever we need it. This level of control has just never been available before, and is literally impossible with satellite-based positioning signals. With GPS you just get what you get.
We are rapidly re-evaluating what may now be possible. We believe we are only at the very beginnings of where we can go with the LocataNet in the mining environment.
Staying One Step Ahead. Shape changes from week to week keep operations continuously relocating around the mine benches; this can, in some instances, make optimal positioning of the Jps LocataNet challenging. In the early stages of the project, we relied on producing computer-generated radio-coverage heat-map models of the pit to determine optimum positions for the individual LocataLite transmitters on the pit rim, and this is still a valid path if given the time.
However, with more Jps rovers becoming available, we now tend to make highly accurate predictions about network configuration on the fly. We can now install spare rovers as portable units in light vehicles (LVs) used by technicians onsite. This roaming functionality allows use of the Jps web browser in the rover to instantly validate, in the pit, any changes that may be required for the network before drilling and digging equipment is moved into place. Thus we can monitor real-world signal conditions in specific areas and adjust LocataLite positions to optimize positioning availability for machines that will soon arrive.
The typical network monitoring scenario nowadays is to quickly move a JPS-enabled LV onto a bench or area yet to be drilled or excavated, and review the signals from the individual LocataLite transmitters in real time. Technicians then make any necessary placement changes to the network in advance of any mining equipment arriving. Our ability to now ensure maximum possible positioning and navigation coverage at all times was undreamt of even 12 months ago.
Dual Rover. A modified HP Leica Drill JS System utilizing a Dual Jps Locata Rover has been installed into the drilling supervisors’ LV wagon. The drilling superintendent and supervisors had been exploring ways of moving towards a paperless system that could not only check the drill pattern itself, but also the areas being mined around the pattern. They identified a use-case example where having accurate positional information available in a vehicle enables supervisors to quickly review the construction and positioning of the protective windrows around the drill patterns. Access tracks and bench heights could also be checked without needing to call surveyors in to help. This degree of instantaneous clarity removes the guesswork associated with windrow construction, designed to provide a safety barrier between trucking and drilling operations. Incorrectly placed windrows can lead to potential flow restrictions in either operation, so getting it right the first time in active areas is important.
Mark-up by Night. Drilling supervisors can now accurately measure and monitor progress across the drill patterns using Locata technology to display virtual maps of all active drilling areas. Another spin-off benefit has been the introduction of a fixed point mounted to the front vehicle bullbar, to provide emergency mark-up of patterns during the nightshift when surveyors are not available on site. This helps particularly when a localized Wi-Fi outage prevents drills from downloading the blast pattern to commence drilling operations in an area of the mine. Before Jps, use of this high-precision GPS technology in vehicle had been considered ineffective and impractical because of the unreliable GPS coverage in the bottom of both pits. Plans are now under way to install a similar system into the shovel and auxiliary supervisors’ vehicles.
Forward! Recent group discussions found consensus that the best way to move forward with this technology now is continued integration into GPS, rather than stand-alone systems. Miners are generally a cautious lot: we could hedge our bets through a combined GPS+Locata solution package. Full-scale integration of Locata technology into future standard GPS products is perceived as a way companies such as NovAtel can provide the total package. We envisage a unified system available from all positioning receiver manufacturers that combines the benefits of GPS technology with the evident improvements and back-up that Locata has provided for environments where GPS is unable to function.
We have been in the enviable position of gaining a glimpse into the future, when the power of GPS-style positioning is improved to fill the GPS holes. The results we have obtained are, frankly, addictive. Having experienced this revolution first-hand, it would now be extremely painful to even contemplate going back to our previous GPS-only world.
Locata Fills Satellite Availability Holes in Obstructed Environments
By Chris Rizos, Nunzio Gambale, and Brendon Lilly
An integrated GNSS+Locata system installed on drills, shovels, and bulldozers — the full complement of high-precision machines on site — at Australia’s Newmont Boddington Gold Mine has increased positioning accuracy and availability, as well as mine operational efficiencies, demonstrating an improvement in availability over GNSS-only of 75.3 to 98.7 percent.
Many of the new paradigms in mining have at their core the requirement for reliable, continuous centimeter-level positioning accuracy to enable increased automation of mining operations. The deployment of precision systems for navigating, controlling, and monitoring machinery such as drills, bulldozers, draglines, and shovels with real-time position information increases operational efficiency, and the automation reduces the need for workers to be exposed to hazardous conditions.
GPS singly, and GNSS collectively, despite their accuracy and versatility, cannot satisfy the stringent requirements for many applications in mine surveying, and mine machine guidance and control. Increasingly, open-cut mines are getting deeper, reducing the sky-view angle necessary for GNSS to operate satisfactorily.
A new terrestrial high-accuracy positioning system can augment GNSS with additional terrestrial signals to enable centimeter-level accuracy, even when there are insufficient GNSS (GPS+GLONASS) satellite signals in view for reliable positioning and navigation. Locata relies on a network of synchronized ground-based transceivers that transmit positioning signals that can be tracked by suitably equipped user receivers.
In September 2012, Leica Geosystems launched the first commercial product integrating GNSS and Locata capabilities into a single high-accuracy and high-availability positioning device for open-cut mine machine automation applications: Leica Jigsaw Positioning System (Jps) – Powered by Locata. This article describes technical aspects of this technology and presents positioning results of actual mine operations.
In the near future — perhaps by 2020 — the number of GNSS and augmentation system satellites useful for high-accuracy positioning will increase to almost 150, with perhaps six times the number of broadcast signals on which carrier phase and pseudorange measurements can be made. However, the most severe limitation of GNSS performance will still remain: the accuracy of positioning deteriorates very rapidly when the user receiver loses direct view of the satellites. This typically occurs in deep open-cut mines as well as in skyscraper-dominated urban canyons.
Locata’s positioning technology solution provides an option either to augment GNSS with extra terrestrial signals, or to replace GNSS entirely. Locata relies on a network of synchronized ground-based transceivers (LocataLites) that transmit positioning signals that can be tracked by suitably equipped user receivers. These transceivers form a network (LocataNet) that can operate in combination with GNSS, or entirely independent of GNSS.
Pseudolites are ground-based transmitters of GPS-like signals. Most pseudolites developed to date transmit signals at the GPS frequency bands. Both pseudorange and carrier-phase measurements can be made on the pseudolite signals. The use of pseudolites can be traced back to the early stages of GPS development in the late 1970s, when they were used to validate the GPS concept before launch of the first GPS satellites.
In 1997, Locata Corporation began developing a technology to provide an alternate local GPS signal capability that would overcome many of the limitations of pseudolite-based positioning systems by using a time-synchronized transceiver. The LocataLite transmits GPS-like positioning signals but also can receive, track, and process signals from other LocataLites. A network of LocataLites forms a LocataNet, and the first-generation system transmitted signals using the same L1 frequency as GPS. Time-synchronized signals allow carrier-phase single-point positioning with centimeter-level accuracy for a mobile unit. In effect, the LocataNet is a new constellation of signals, with some unique features such as having no base station data requirement, requiring no wireless data link from reference station to mobile receiver, and no requirement for measurement double-differencing.
Improvements dating from 2005 use a proprietary signal transmission structure that operates in the license-free Industry Scientific and Medical (ISM) band (2.4–2.4835GHz), known globally as the Wi-Fi band. Within this ISM band, the LocataLite design allows for the transmission of two frequencies, each modulated with two spatially-diverse PRN codes. From the beginning the driver for the Locata technology was to develop a centimeter-level accuracy positioning system that could complement, or replace, conventional RTK-GNSS in environments such as open-cut mines, deep valleys, heavily forested areas, urban and even indoor locations, where obstruction of satellite-based signals occurs.
Leica Geosystems has been testing Locata in the Newmont Boddington Gold Mine (NBG) in Western Australia for several years. In 2006, NBG started installing Leica Geosystems high-precision GPS-based guidance systems for fleet management. The mine operators determined early on that as the pit grew deeper, they would need an alternative positioning system for these guidance systems to continue working for the life of the mine. In March 2012, Leica Geosystems deployed a world-first production version of its Jigsaw Positioning system, integrating GNSS+Locata, at the NBG mine.
Expected to become Australia’s largest gold producer, the mine consists of two pits (Figure 1). The North Pit at NBG is currently about 1 kilometer long, 600 meters wide, and now approaching 275 meters deep.
Figure 1. Location of 12 LocataLites at NBG Mine.Figure 2. The Newmont Boddington pit, 900 feet deep and going deeper all the time, creates difficulties for GNSS equipment positioning the mine’s heavy machinery.
A single LocataNet consisting of 12 LocataLites was deployed during April and May 2012 in an initial installation designed to cover both pits in the mine. The results presented here are taken from tests in the North Pit.
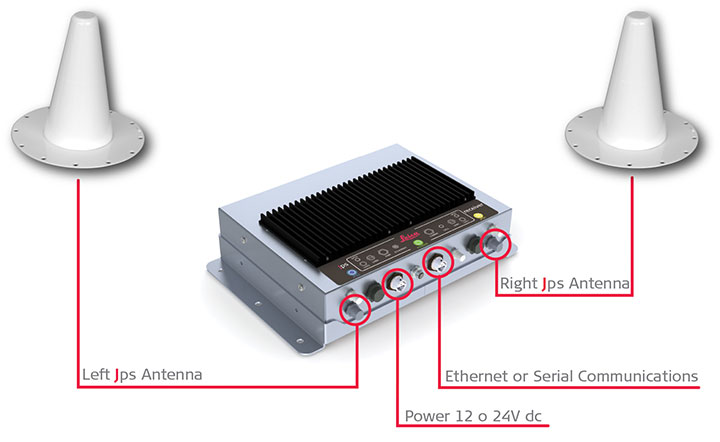
Leica’s version of the LocataLite is solar-powered and designed to be placed in the best locations to achieve the maximum benefit. As no special consideration for the location of a transmitter base station is required, the LocataLites can be placed in areas on the rim of the pit or just above the machines operating in the pit floor. The only set-up requirement is that they are able to see at least one other LocataLite to synchronize their transmissions to around 1 nanosecond or better throughout the mine.
Each Jps transmit tower has four small patch antennas mounted in an array. The uppermost is a GNSS antenna used to self-survey the top of the tower, and hence derive the positions of the other antennas below it on the tower. The Locata transmit 1 antenna is mounted directly under the GNSS antenna. The Locata receive antenna is directly under that, and the Locata transmit 2 antenna is around two meters lower down on the tower.
All the antennas are separated by a known distance, and the LocataLite transmit antennas can be tilted down into the pit to maximize the signal broadcast into the area. Each LocataLite transmits four independent positioning signals, two signals from each transmit antenna. These signals provide a level of redundancy and greatly assist in the mitigation of multipath problems in the pit, thereby contributing to the robustness and reliability of the positioning solution.
Jps receivers were first installed on two production drill rigs in April 2012. Installation on drills was the highest priority because they are the machines at NBG that operate closest to pit walls and other obstructions, and therefore stood to benefit most from having more reliable positioning. Each Jps receiver incorporates two GNSS and two Locata receivers (Figure 3). One GNSS and Locata receiver pair is connected to a co-located antenna on one side of the machine and the other GNSS and Locata receiver pair is connected to the other co-located antenna. The GNSS receivers obtain their RTK corrections from an RTK base station. The Locata receivers do not require any corrections. The system uses the NMEA outputs from both pairs of receivers to determine the position and heading of the drill rig for navigation purposes.
Figure 3. Jps receiver with integrated GNSS and Locata receivers and two receiver antennas.
The goal of the Jps receiver is to improve the availability of high-accuracy RTK positions with fixed carrier phase integer ambiguities. The results presented here are therefore divided into three sections:
Improvements in availability over a two-month period for all the data in the North Pit.
Improvements in availability for an area in the pit where the GNSS savings are expressed in dollar terms.
Accuracy results achieved and maintained in this GNSS-degraded area.
The performance results shown here are real-world samples of the system operating on drills at NBG. However, it will be appreciated that GNSS satellites are in constant motion, so GNSS-only position availability in different parts of the pit changes by the hour. The results therefore only apply to those drills in those positions in the pit at that time.
Another drill a little distance away in the same pit could experience far better or far worse GNSS availability at exactly the same time.
Overall Availability
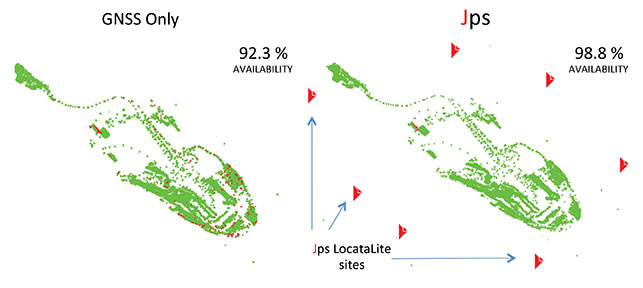
Figure 4 shows the performance difference between using GNSS-only (left) and Jps GNSS+Locata (right). The data for these plots was recorded for the two drills that contained the Jps receiver in the North Pit during the months of April and May 2012. A green dot represents the time the receiver had a RTK fixed solution, and a red dot represents all other lower-quality position solutions — essentially when the receiver was unable to achieve the required RTK accuracy because of insufficient GNSS signals or geometry.
Figure 4. Plots of availability and position quality in the North Pit at NBG for April and May 2012 for GNSS (left) and Jps (right). Green = RTK (fixed) solution, Red = all lesser quality solutions.
Although the availability of GNSS-only RTK fixed position solutions was reasonably good over this entire area, being at the 92.3 percent level at that time, the Jps nevertheless provided a measurable improvement of 6.5 percent to availability, bringing it up to 98.8 percent. Considering that during those two months, the two drills spent a total of 72.24 operational days in the North Pit, this improvement equates to nearly 4.7 days or 112.7 hours of additional guidance availability.
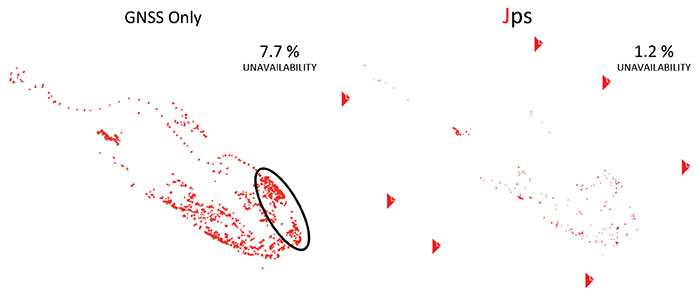
Figure 5 highlights the low positional quality for the GNSS-only solutions and how Jps significantly improved the availability in areas of limited GNSS satellite visibility.
Figure 5. Plots showing non-RTK quality positions, demonstrating that Jps can help reduce lesser-quality RTK solutions. (Performance in the circled area is highlighted in more detail in Figure 6.)
Availability in Poor GNSS Visibility
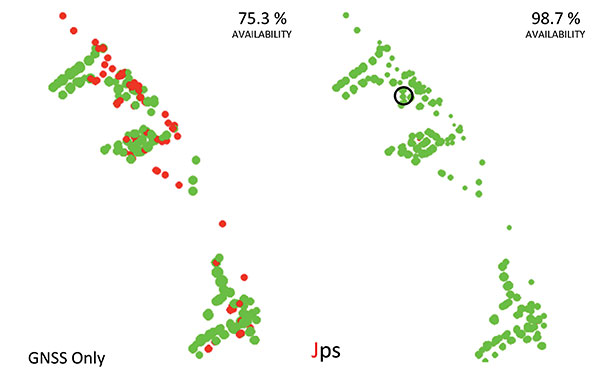
The ellipse in Figure 5 highlights a particular location in the North Pit where GNSS positioning consistently struggles due to the presence of the northern wall and to a lesser extent from the eastern wall. The integration of GNSS and Locata signals improved availability as shown in Figure 6, which in this case increased by 23.4 percent.
Figure 6. Zoomed-in area where GNSS performance was poor between May 2 and May 4, 2012. The circled area shows where the accuracy tests were performed.
As the machine downtime due to not having a RTK position costs the mine approximately U.S. $1000 per hour for each drill, the improvement in availability of 112.7 hours for just the two drills shown in Figure 5 over the two months equates to a savings of $112,700 in operational costs. This productivity increase is significant, considering that the GNSS-only availability in this case still seems relatively good at 92.3 percent. If the GNSS availability for those two months was more like 75 percent — as was the case shown in Figure 6 for the two days in May — then the cost savings become far greater, approaching nearly $400,000, for just two drills over two months. Even a small increase in productivity brings a significant financial benefit ($110,000 per hour) when all 11 drill rigs running in the mine are affected by loss of GNSS positioining availability, yet continue to operate with Jps.
Today all 11 drills in the pits have been fitted with the Jps GNSS+Locata Receivers. As a point of reference to emphasize the level of operational savings: if the Jps had been fitted to all 11 drills during the April and May 2012 period shown in the above results, the cost savings at that time would have been on the order of $1,000,000. It is clear that the savings in production costs that can be gained from improving the availability to the fleet guidance system has a significant impact on the return-on-investment, potentially covering the installation costs within months of deployment. It should also be emphasized that as the pits get deeper, GNSS availability will only degrade further, and the evident production and dollar benefits of the integrated GNSS+Locata system become even larger.
Relative Accuracy
The above levels of improvement in availability are of no benefit if the position accuracy is not maintained within acceptable limits. In order to compare the relative accuracy between the two systems, a dataset was taken from the same data above (circle in Figure 6) when the machine was stationary.
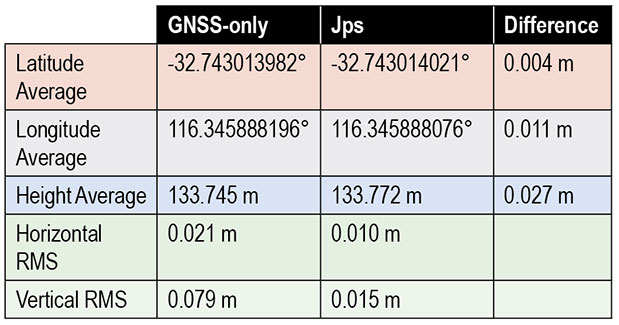
The average position difference between the GNSS-only and Jps receivers for the hour-long dataset was 1.2 centimeters horizontally and 2.7 cm in the vertical component (Table 1). The spread of the position solutions for the two receivers were comparable in the horizontal, with Jps providing a slightly better horizontal RMS value due to the extra Locata signals being tracked and the stronger overall geometry. Additionally, Jps showed a better RMS in the vertical compared to GNSS-only.
Table 1. Comparison of relative accuracy and RMS between the GNSS-only and GNSS+Locata solutions.
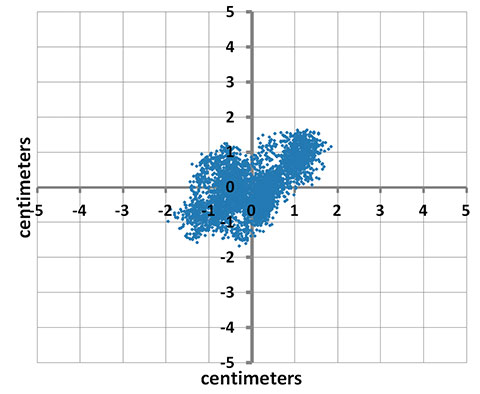
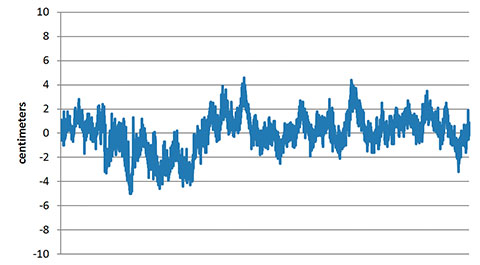
Figure 7a shows the spread of horizontal positions for the Jps receiver, where 0,0 is the mean horizontal position during this time. Note that all the positions are grouped within +/-2 cm of the mean without any outliers. Figure 7b shows the corresponding spread in the vertical positions. These are well within the acceptable accuracy limits required by the machine guidance systems used at the mine.
Figure 7A. Scatter plot of the positions from the Jps receiver over a period of over an hour.Figure 7B. Vertical error for same sample set as Figure 7a.
Concluding Remarks
Based on the experiences at Newmont Boddington Gold, use of Jps has improved the operational availability of open-pit drilling machines by at least 6.5 percent by reducing the outages in 3D positioning caused by poor GNSS satellite visibility commonly associated with deep pits. When Jps is subjected to much harsher conditions closer to high walls, the Jps continues to perform and the improvement in availability compared to GNSS-only is more significant while still maintaining RTK-GNSS levels of accuracy. The additional availability achieved translates directly into cost savings in production for the mine.
Acknowledgments
The first author acknowledges the support on the Australian Research Council grants that have supported research into pseudolites and Locata:
LP0347427 “An Augmented-GPS Software Receiver for Indoor/Outdoor Positioning,”
LP0560910 “Network Design & Management of a Pseudolite and GPS Based Ubiquitous Positioning System,”
LP0668907 “Structural Deformation Monitoring Integrating a New Wireless Positioning Technology with GPS,”
DP0773929 “A Combined Inertial, Satellite & Terrestrial Signal Navigation Device for High Accuracy Positioning & Orientation of Underground Imaging Systems.”
The authors also thank the many people that have contributed to the development of the Leica Jps product. The Leica Geosystems Machine Control Core and CAL teams in Brisbane and Switzerland, other Hexagon companies such as Antcom Corporation and NovAtel, the Locata team in Canberra and the United States, and the people at Newmont Boddington Gold that have gone out of their way to make this a success.
Chris Rizos is a professor of geodesy and navigation at the University of New South Wales; president of the International Association of Geodesy; a member of the Executive and Governing Board of the International GNSS Service (IGS), and co-chair of the Multi-GNSS Asia Steering Committee.
Nunzio Gambale is co-founder and CEO of Locata Corporation, and represents the team of engineers who invented and developed Locata.
Brendon Lilly is the product manager for the Leica Jps product at Leica Geosystems Mining and has worked for more than 20 years in both software and hardware product development. He has a Ph.D. from Griffith University.
In recent years, the sporting world has seen an explosion in the use of GPS. You will rarely spot a runner or cyclist on the road without either a smartphone strapped to their arm or a dedicated GPS device clamped to their handlebars, tracking their every move.
The amount of information that the modern sportsperson — from casual amateur to full-time professional — logs, analyzes, and shares is phenomenal. There are now dozens of ways of uploading data for the whole world to share and study.
As more manufacturers come to this market with the hope of capturing a share of it, they face the challenge of effectively developing and then testing their devices. Among many factors to consider, new products must have capability for local constellations such as BeiDou, GLONASS, and QZSS, not just GPS alone. New market entrants won’t have the same budget as the established big players, and constantly traveling to China or Japan to try out a new gadget will escalate costs to an unsustainable degree.
Then there’s the issue of getting out into the kind of environment in which you imagine your new sporting GPS device will be put to use. In many cases this will be remote: forests, hills, and mountains. Stepping outside to the office car park does not constitute a sufficient test for satellite acquisition and retention. Neither does simply driving the commute route home with it.
A GPS simulator or replay device allows for bench testing, but such devices are expensive. They might not actually fulfill your testing requirements, either: a traditional GPS simulator outputs its scenarios based on constellation modeling, either as a perfect signal or one that has simulated multipath. But you need to genuinely know how your new product will operate through, say, a forest on a downhill mountain bike run, or during a city marathon through urban canyons, or on a trail under wet trees. Adventure sport participants want to record their achievements wherever they go.
How do you obtain this kind of realistic scenario? It will require the use of a GNSS recorder, and in an ideal world you would lend it to someone who actually does some of this stuff. Perhaps one of your colleagues is an (insane) downhill skier — who better to capture exactly that type of data, which you can replay back in a nice warm lab?
The trouble is that a person of this sporting ilk will be unwilling or unable to carry bulky equipment that weighs several kilos. It will slow them down, so a GNSS recorder that can be easily carried without affecting the sporting activity is essential. It has to be easy to use: self-contained, with a battery that will last a couple of hours, and with one big button to start and stop recording. The user shouldn’t need any training in its operation. And ideally, it won’t need a large ground-plane antenna to capture usable data; a well-designed unit will employ a sensitive GPS engine allowing for as complete a signal as possible to be logged through a standard passive antenna.
Looking further afield, other industries will soon be seeking a device with this level of convenience. For instance, agricultural and automotive manufacturers want the ability to send test engineers out to record drive-cycle tests easily and in a variety of vehicles. Additional features, such as controlled area network (CAN) and inertial sensor logging, synchronized with the GNSS data, will also find favor.
The nature of the simulation market is changing: increasing numbers of developers need not just a traditional constellation simulator, but rather a replay device that is feature-rich and that doesn’t cost the earth.
Economies of scale will likely dictate the way that this develops, and GNSS simulation will no longer be the specialist and exclusive field it once was.
Mark Sampson is the LabSat product manager for RaceLogic, based in Buckingham, UK.
Avenza’ PDF Maps app is now available at the Google Play Store.
Avenza Systems Inc., producers of MAPublisher cartographic software for Adobe Illustrator and Geographic Imager geospatial tools for Adobe Photoshop, announce that PDF Maps app is now available on the Google Play Store. The first and only geospatial PDF and GeoTIFF reader for Android devices, Avenza said, the PDF Maps app is unique to the space due to its extensive collection of more than 100,000 detailed maps sourced from well-established publishers, cartographers, government agencies and aficionados of outdoor recreational activities, all of which are downloadable directly from within the app.
PDF Maps take advantage of geospatial technology that allows consumers to view maps and measure real world distances and areas. Paired together with mobile devices that use GPS such as Androids, the PDF Maps app provides constant access to geographic locations and even points of interest without the risk of losing reception due to cell tower proximity.
Designed with its audience of travelers and outdoor enthusiasts in mind, Avenza’s PDF Maps app has already garnered accolades from the International Map Industry Association (IMIA) and Geospatial World for its innovative use of technology on the iOS platform in 2011 and 2012. Since then, its versatility for recreational or business purposes out in the field has been recognized across several industries and it’s gaining momentum.
“The market is currently saturated with map apps that are limited in map data, or too simplified to be functional for offline navigating. We wanted to address those issues by providing a free navigational app that catered to a segment of users who needed something more substantial than the average turn-by-turn digital maps offered today, while providing map-publishers with an iTunes-like environment for distributing their maps direct to devices” said Ted Florence, President of Avenza Systems Inc.
“With Avenza’s PDF Maps app Android users can do more than just view their location. PDF Maps provides a meaningful interface to measure distances, drop placemarks and share personal recorded data in various formats. It’s more than just a viewing tool, but will provide the Android market the best of both worlds — access to maps from well-known paper map publishers that work in tandem with the functionality of GPS devices. We’re thrilled to finally make it available to a new market.”
Unlike other map apps that provide one view of a location using GPS coordinates as most maps do, Avenza’s PDF Maps app expands a traveler’s choices, allowing them to access detailed geography or points of interest created by specific map publishers for use on land, sea or air. PDF Maps app for Android allows consumers to access information while at a destination, providing users an opportunity to make the most of their time experiencing their environment rather than searching for cell reception to access directions.
Currently, Avenza’s vast PDF Maps app library covers maps for domestic and international travel organized by state and area. Android users will appreciate the breadth of tool management features available. All maps — free and purchased — are accessible through the in-app map store and offer the following capabilities:
Add maps from the file system, Dropbox, a URL, email, or Map Store
Browse, purchase, and download maps from the Avenza Map Store (existing iOS PDF Maps accounts are compatible)”
Show GPS position on maps
Add Placemarks
Import and export KML
Find Coordinates
Measure Distance or Area
Open current view in Google Maps
Avenza’s PDF Maps in-app Map Store features a variety of publishers that focus on recreational activities as well as all segments of the map-use market. Below is a small sampling of maps available:
Camping and hiking including National Park Service maps and other regions of the world
Nautical and marine navigation including NOAA and FAA charts for North America and other regions of the world
Topographic use including USGS and Canadian Topographic maps and other regions of the world
Maps for tourists, transit, travel, special events, historic and much more
PDF Maps is available now in the Google Play Store free of charge. For more information about PDF Maps, visit the Avenza website at www.avenza.com/pdf-maps. Pricing of each map is set by the publisher and free maps remain free to users through the PDF Maps app in-app store.
Thousands of high-speed pursuits by law enforcement take place in the U.S. every year, which can endanger other vehicles and property. A new product aimed at law enforcement is designed to help police track cars during these high-speed chases.
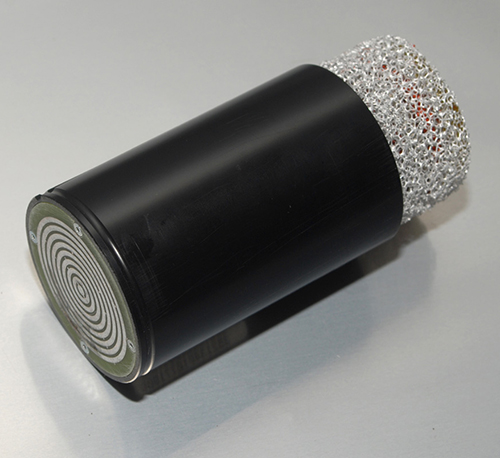
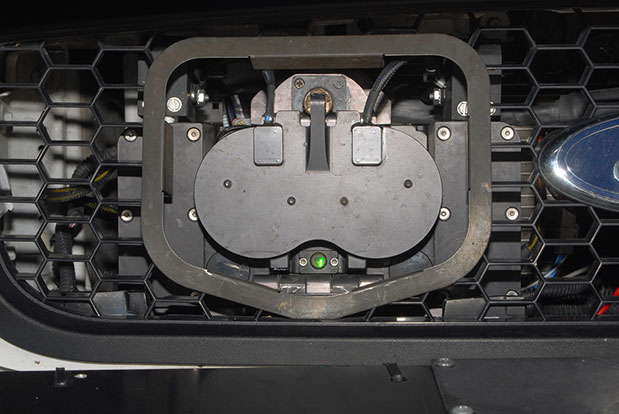
The StarChase system pursuit reduction technology contains a miniature GPS module encased in a tracking projectile/tag and a launcher mounted on a police vehicle. During a pursuit, a GPS tracker tag is shot with compressed air out of a patrol car’s hood onto the car being pursued, to identify the vehicle.
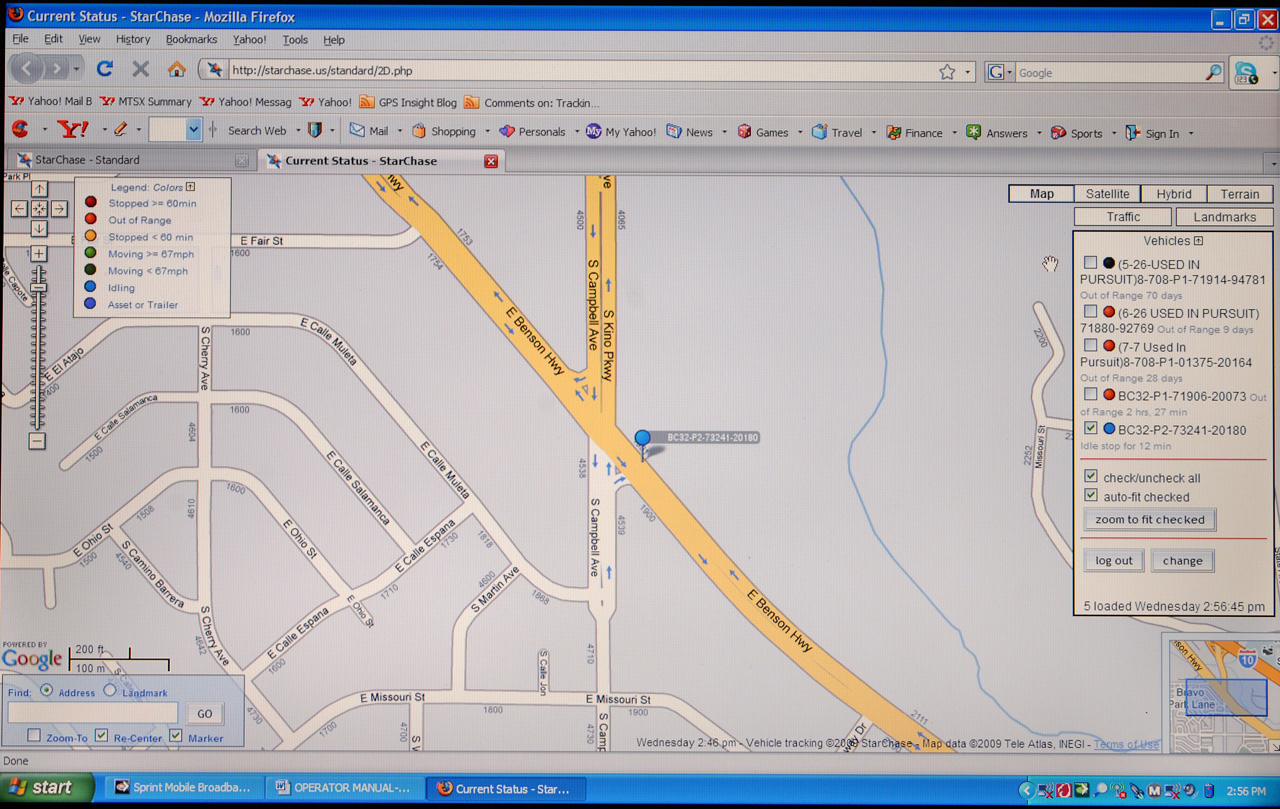
The compressed-air launcher, mounted behind the grille of a police cruiser, uses a laser to target the fleeing vehicle. It discharges a projectile/tag containing the GPS module. The projectile adheres to the suspect vehicle and transmits coordinates back to dispatch. The dispatcher then views the location and movements of the tagged vehicle in near real-time on a digital road map via a secure Internet connection.
Through the efficient use of technology, a high-speed chase has been replaced with a safer interdiction strategy, according to the company.
The StarChase mapping platform is a secure, scalable Web-based solution that does not require special hardware to operate. It is compatible with existing CAD and AVL systems.
The StarChase compressed air launcher under the hood.The StarChase projectile.Tagged vehicles are tracked by dispatch.
Linx Technologies has launched its GM Series GNSS receiver module. The module is an autonomous, high-performance GNSS receiver designed for navigation, asset tracking and positioning applications of all kinds. Based on the MediaTek chipset, it can simultaneously acquire and track several satellite constellations. These include GPS, Europe’s Galileo, Russia’s GLONASS, and Japan’s QZSS.
The GNSS receiver module provides exceptional sensitivity, even in dense foliage or urban canyons, Linx Technologies said. Hybrid ephemeris prediction can be used to achieve cold start times of less than 15 seconds. By combining this feature with the module’s very low power consumption, battery life is maximized in battery-powered systems.
With an output of standard NMEA data, the GM Series GNSS receiver is self-contained and only requires an antenna. It powers up and outputs position data without any software set-up or configuration, making the GM Series easy to integrate, even by engineers without previous RF or GNSS experience. However, if technical support is needed, our knowledgeable team of engineers can provide guidance.
The GM Series module operates at a low 16mA tracking supply current. This is less than half the supply current of competitive modules.
In addition, the available GPS Master Development System connects a GM Series Evaluation Module to a prototyping board with a color display that shows coordinates, speedometer and compass for mobile evaluation. A USB interface allows simple viewing of satellite data and Internet mapping, as well as custom software application development.
The Netherlands Institute of Navigation will be hosting the European Navigation Conference (ENC-GNSS 2014) in Rotterdam, the Netherlands, April 15-17, 2014. The conference will cover all aspects of positioning, navigation and timing (PNT) developments and applications. Special sessions will be organized for innovations and their commercialization.
Abstracts can be submitted until December 31, 2013, at www.enc-gnss2014.com. Topics include, but are not limited to
– Algorithms and Methods: Navigation and Positioning
– Algorithms and Methods: Receiver Signal Processing
– Alternatives and Backups to GNSS
– Atmosphere and Space Weather
– Augmentation Systems
– Aviation Navigation
– eLoran and other LF Systems
– Emerging GNSS
– Galileo IOV Results
– Galileo Public Regulated Service (PRS)
– GNSS Programs, Status and Modernization
– GNSS Vulnerabilities
– Indoor Navigation
– Integrated Systems
– Integrity
– Interoperability and Multi-Constellation Results
– Location Based Services
– Maritime Navigation
– MEMS
– Network RTK, Surveying and Hydrography
– New Products and Services/Business, Economic and IP Aspects
– Precise Point Positioning
– Receiver and Antenna Technology
– Signals of Opportunity
– Simulation
– Spectrum, Interference, Interference Detection and Localisation, Spoofing
– Timing, Time and Frequency Transfer
– TRANSMIT
– Unmanned Aerial Vehicles
– Unmanned Vehicles
– Urban Navigation
Further details about the conference, the venue, and the hosting City of Rotterdam can be found on www.enc-gnss2014.com. Note that the conference is the week before Easter, which is a great opportunity to stay a few days longer and visit the Dutch windmills, tulip fields (they will be in full bloom), and the Port of Rotterdam, one of the greatest in the world.
After a two-week delay, a rocket carrying a GPS instrument designed by University of New Brunswick scientists was launched into space aboard the SpaceX Falcon 9 rocket on September 29. The rocket left Vandenberg Air Force base in California as part of the CASSIOPE (Cascade Smallsat and Ionospheric Polar Explorer) mission.
Dr. Richard Langley, GPS World Innovation editor and professor in geodesy and geomatics engineering at the University of New Brunswick, is a principal investigator behind the scientific portion of the CASSIOPE mission. Langley and his colleagues will monitor data from the GPS instrument, which is part of the Enhanced Polar Outflow Probe (e-POP) payload aboard the spacecraft.
E-POP will continue the sequence of Canada’s orbiting space environment sensors, which began with Canada’s first satellite, Alouette 1, launched in 1962 to study the ionosphere. e-POP is, perhaps, the most extensive suite of sensors for studying the ionosphere/magnetosphere/thermosphere yet to be launched, and will provide Canadian and other scientists with the opportunity to better understand the impact and variability the sun has on the space environment — what we call “space weather.”
A static fire retested the Falcon 9 rocket after several problems cropped up during a hotfire of the launcher’s engines during preparation for the original launch date September 15. The launch was then delayed because the U.S. Air Force Western Range, which controls a network of tracking and communications assets based at Vandenberg, was busy with Minuteman ballistic missile testing.
The small hybrid satellite blasted off on board a Falcon 9 rocket developed by SpaceX, a commercial space company. The Canadian Space Agency became one of SpaceX’s first customers when the agency decided years ago to use the private U.S. rocket to deliver the satellite at a reduced cost of $10 million. It cost the space agency $63 million to develop the satellite.
The Falcon 9 rocket, with CASSIOPE inside its fairing, on the way to the launch pad at Vandenberg Air Force Base. (Photo credit: SpaceX).The research satellite CASSIOPE on a test platform at the Canadian Space Agency’s David Florida Laboratory. CASSIOPE hosts the GPS Attitude, Positioning, and Profiling instrument designed by GGE researchers. The four white antennas on the left-facing side of the spacecraft will be used to determine the position, velocity, and attitude of the spacecraft while the antenna on the upper side will be used to profile the ionosphere’s electron density. (Photograph courtesy of MacDonald, Dettwiler and Associates Ltd.)