Below is a letter sent on November 3 by Senators Joe Liberman, chairman, and Susan M. Collins, ranking member, Committee on Homeland Security and Governmental Affairs, to Secretary of Homeland Security Janet Ann Napolitano protesting the termination of the Loran service:
To meet the challenges inherent in producing a low-cost, highly CPU-efficient software receiver, the multiple offset post-processing method leverages the unique features of software GNSS to greatly improve the coverage and statistical validity of receiver testing compared to traditional, hardware-based testing setups, in some cases by an order of magnitude or more.
By Alexander Mitelman, Jakob Almqvist, Robin Håkanson, David Karlsson, Fredrik Lindström, Thomas Renström, Christian Ståhlberg, and James Tidd, Cambridge Silicon Radio
Real-world GNSS receiver testing forms a crucial step in the product development cycle. Unfortunately, traditional testing methods are time-consuming and labor-intensive, particularly when it is necessary to evaluate both nominal performance and the likelihood of unexpected deviations with a high level of confidence. This article describes a simple, efficient method that exploits the unique features of software GNSS receivers to achieve both goals. The approach improves the scope and statistical validity of test coverage by an order of magnitude or more compared with conventional methods.
While approaches vary, one common aspect of all discussions of GNSS receiver testing is that any proposed testing methodology should be statistically significant. Whether in the laboratory or the real world, meeting this goal requires a large number of independent test results. For traditional hardware GNSS receivers, this implies either a long series of sequential trials, or the testing of a large number of nominally identical devices in parallel. Unfortunately, both options present significant drawbacks.
Owing to their architecture, software GNSS receivers offer a unique solution to this problem. In contrast with a typical hardware receiver application-specific integrated circuit (ASIC), a modern software receiver typically performs most or all baseband signal processing and navigation calculations on a general-purpose processor. As a result, the digitization step typically occurs quite early in the RF chain, generally as close as possible to the signal input and first-stage gain element. The received signal at that point in the chain consists of raw intermediate frequency (IF) samples, which typically encapsulate the characteristics of the signal environment (multipath, fading, and so on), receiving antenna, analog RF stage (downconversion, filtering, and so on), and sampling, but are otherwise unprocessed. In addition to ordinary real-time operation, many software receivers are also capable of saving the digital data stream to disk for subsequent post-processing. Here we consider the potential applications of that post-processing to receiver testing.
FIGURE1. Conventional test drive (two receivers)
Conventional Testing Methods
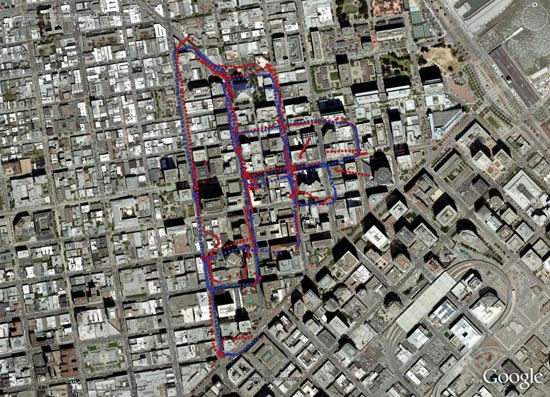
Traditionally, the simplest way to test the real-world performance of a GNSS receiver is to put it in a vehicle or a portable pack; drive or walk around an area of interest (typically a challenging environment such as an “urban canyon”); record position data; plot the trajectory on a map; and evaluate it visually. An example of this is shown in Figure 1 for two receivers, in this case driven through the difficult radio environment of downtown San Francisco.
While appealing in its simplicity and direct visual representation of the test drive, this approach does not allow for any quantitative assessment of receiver performance; judging which receiver is “better” is inherently subjective here. Different receivers often have different strong and weak points in their tracking and navigation algorithms, so it can be difficult to assess overall performance, especially over the course of a long trial. Also, an accurate evaluation of a trial generally requires some first-hand knowledge of the test area; unless local maps are available in sufficiently high resolution, it may be difficult to tell, for example, how accurate a trajectory along a wooded area might be.
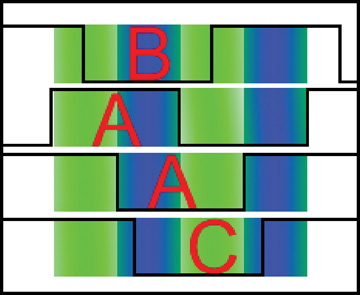
In Figure 2, it appears clear enough that the test vehicle passed down a narrow lane between two sets of buildings during this trial, but it can be difficult to tell how accurate this result actually is. As will be demonstrated below, making sense of a situation like this is essentially beyond the scope of the simple “visual plotting” test method.
FIGURE 2. Test result requiring local knowledge to interpret correctly.
To address these shortcomings, the simple test method can be refined through the introduction of a GNSS/INS truth reference system. This instrument combines the absolute position obtainable from GNSS with accurate relative measurements from a suite of inertial sensors (accelerometers, gyroscopes, and occasionally magnetometers) when GNSS signals are degraded or unavailable. The reference system is carried or driven along with the devices under test (DUTs), and produces a truth trajectory against which the performance of the DUTs is compared.
This refined approach is a significant improvement over the first method in two ways: it provides a set of absolute reference positions against which the output of the DUTs can be compared, and it enables a quantitative measurement of position accuracy. Examples of these two improvements are shown in Figure 3 and Figure 4.
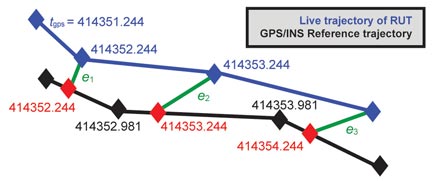
FIGURE 3. Improved test with GPS/INS truth reference: yellow dots denote receiver under test; green dots show the reference trajectory of GPS/INS.FIGURE 4. Time-aligned 2D error.
As shown in Figure 4, interpolating the truth trajectory and using the resulting time-aligned points to calculate instantaneous position errors yields a collection of scalar measurements en. From these values, it is straightforward to compute basic statistics like mean, 95th percentile, and maximum errors over the course of the trial. An example of this is shown in Figure 5, with the data (horizontal 2D error in this case) presented in several different ways. Note that the time interpolation step is not necessarily negligible: not all devices align their outputs to whole second boundaries of GPS time, so assuming a typical 1 Hz update rate, the timing skew between a DUT and the truth reference can be as large as 0.5 seconds. At typical motorway speeds, say 100 km/hr, this results in a 13.9 meter error between two points that ostensibly represent the same position. On the other hand, high-end GPS/INS systems can produce outputs at 100 Hz or higher, in which case this effect may be safely neglected.
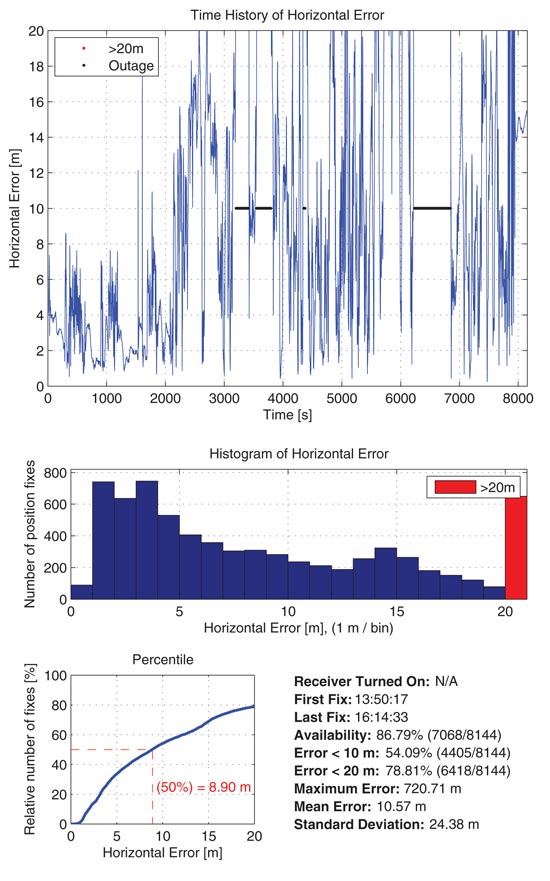
FIGURE 5. Quantifying error using a truth reference
Despite their utility, both methods described above suffer from two fundamental limitations: results are inherently obtainable only in real time, and the scope of test coverage is limited to the number of receivers that can be fixed on the test rig simultaneously. Thus a test car outfitted with five receivers (a reasonable number, practically speaking) would be able to generate at most five quasi-independent results per outing.
Software Approach
The architecture of a software GNSS receiver is ideally suited to overcoming the limitations described above, as follows.
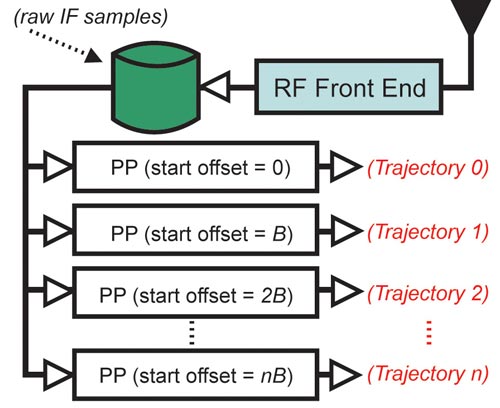
The raw IF data stream from the analog-to-digital converter is recorded to a file during the initial data collection. This file captures the essential characteristics of the RF chain (antenna pattern, downconverter, filters, and so on), as well as the signal environment in which the recording was made (fading, multipath, and so on). The IF file is then reprocessed offline multiple times in the lab, applying the results of careful profiling of various hardware platforms (for example, Pentium-class PC, ARM9-based embedded device, and so on) to properly model the constraints of the desired target platform. Each processing pass produces a position trajectory nominally identical to what the DUT would have gathered when running live. The complete multiple offset post-processi
ng (MOPP) setup is illustrated in Figure 6.
FIGURE 6. Multiple Offset Post-Processing (MOPP).
The fundamental improvement relative to a conventional testing approach lies in the multiple reprocessing runs. For each one, the raw data is processed starting from a small, progressively increasing time offset relative to the start of the IF file. A typical case would be 256 runs, with the offsets uniformly distributed between 0 and 100 milliseconds — but the number of runs is limited only by the available computing resources, and the granularity of the offsets is limited only by the sampling rate used for the original recording. The resulting set of trajectories is essentially the physical equivalent of having taken a large number of identical receivers (256 in this example), connecting them via a large signal splitter to a single common antenna, starting them all at approximately the same time (but not with perfect synchronization), and traversing the test route.
This approach produces several tangible benefits.
The large number of runs dramatically increases the statistical significance of the quantitative results (mean accuracy, 95th percentile error, worst-case error, and so on) produced by the test.
The process significantly increases the likelihood of identifying uncommon (but non-negligible) corner cases that could only be reliably found by far more testing using ordinary methods.
The approach is deterministic and completely repeatable, which is simply a consequence of the nature of software post-processing. Thus if a tuning improvement is made to the navigation filter in response to a particular observed artifact, for example, the effects of that change can be verified directly.
The proposed approach allows the evaluation of error models (for example, process noise parameters in a Kalman filter), so estimated measurement error can be compared against actual error when an accurate truth reference trajectory (such as that produced by the aforementioned GPS/INS) is available. Of course, this could be done with conventional testing as well, but the replay allows the same environment to be evaluated multiple times, so filter tuning is based on a large population of data rather than a single-shot test drive.
Start modes and assistance information may be controlled independently from the raw recorded data. So, for example, push-to-fix or A-GNSS performance can be tested with the same granularity as continuous navigation performance.
From an implementation standpoint, the proposed approach is attractive because it requires limited infrastructure and lends itself naturally to automated implementation. Setting up handful of generic PCs is far simpler and less expensive than configuring several hundred identical receivers (indeed, space requirements and RF signal splitting considerations alone make it impractical to set up a test rig with anywhere near the number of receivers mentioned above). As a result, the software replay setup effectively increases the testing coverage by several orders of magnitude in practice. Also, since post-processing can be done significantly faster than real time on modern hardware, these benefits can be obtained in a very time-efficient manner.
As with any testing method, the software approach has a few drawbacks in addition to the benefits described above. These issues must be addressed to ensure that results based on post-processing are valid and meaningful.
Error and Independence
The MOPP approach raises at least two obvious questions that merit further discussion.
How accurately does file replay match live operation?
Are runs from successive offsets truly independent?
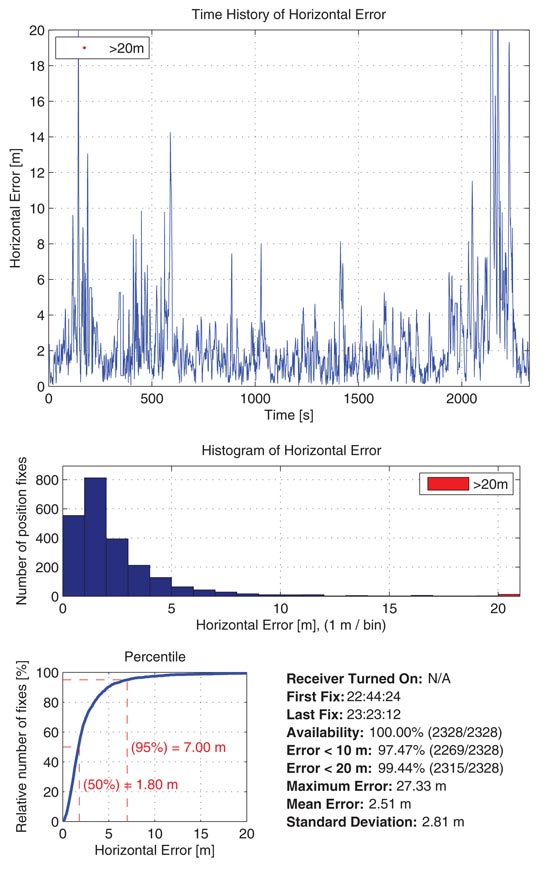
The first question is answered quantitatively, as follows. A general-purpose software receiver (running on an x86-class netbook computer) was driven around a moderately challenging urban environment and used to gather live position data (NMEA) and raw digital data (IF samples) simultaneously. The IF file was post-processed with zero offset using the same receiver executable, incorporating the appropriate system profiling to accurately model the constraints of real-time processing as described above, to yield a second NMEA trajectory. Finally, the two NMEA files were compared using the methods shown in Figure 4 and Figure 5, this time substituting the post-processed trajectory for the GPS/INS reference data. A plot of the resulting horizontal error is shown in Figure 7.
FIGURE 7. Quantifying error introduced by post-processing.
The mean horizontal error introduced by the post-processing approach relative to the live trajectory is on the order of 2.5 meters. This value represents the best accuracy achievable by file replay process for this environment.
More challenging environments will likely have larger minimum error bounds, but that aspect has not yet been investigated fully; it will be considered in future work. Also, a single favorable comparison of live recording against a single replay, as shown above, does not prove that the replay procedure will always recreate a live test drive with complete accuracy. Nevertheless, this result increases the confidence that a replayed trajectory is a reasonable representation of a test drive, and that the errors in the procedure are in line with the differences that can be expected between two identical receivers being tested at the same time.
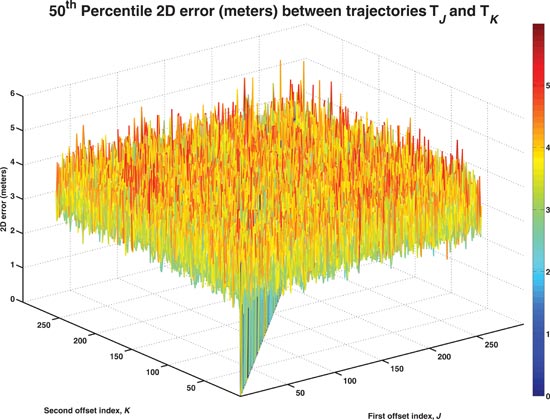
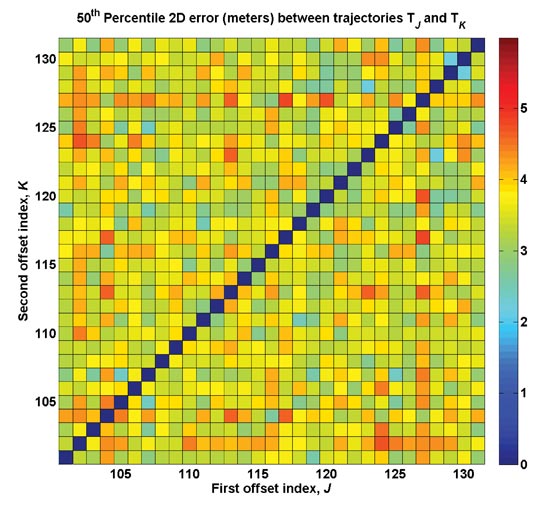
To address the question of run-to-run independence, consider two trajectories generated by post-processing a single IF file with offsets jB and kB, where B is some minimum increment size (one sample, one buffer, and so on), and define FJK to be some quantitative measurement of interest, for example mean or 95th percentile horizontal error. The deterministic nature of the file replay process guarantees FJK = 0 for j = k. Where j and k differ by a sufficient amount to generate independent trajectories, FJK will not be constant, but should be centered about some non-negative underlying value that represents the typical level of error (disagreement) between nominally identical receivers. As mentioned earlier, this is the approximate equivalent of connecting two matched receivers to a common antenna, starting them at approximately the same time, and driving them along the test trajectory.
Given these definitions, independence is indicated by an abrupt transition in FJK between identical runs ( j = k) and immediately adjacent runs (|j – k| = 1) for a given offset spacing B. Conversely, a gradual transition indicates temporal correlation, and could be used to determine the minimum offset size required to ensure run-to-run independence if necessary. As shown in Figure 8, the MOPP parameters used in this study (256 offsets, uniformly spaced on [0, 100 msec] for each IF file) result in independent outputs, as desired.
FIGURE 8. Verifying independence of adjacent offsets (upper: full view; lower: zoomed top view)
One subtlety pertaining to the independence analysis deserves mention here in the context of the MOPP method. Intuitively, it might appear that the offset size B should have a lower usable bound, below which temporal correlation begins to appear between adjacent post-processing runs. Although a detailed explanation is outside the scope of this paper, it can be shown that certain architectural choices in the design of a receiver’s baseband can lead to somewhat counterintuitive results in this regard.
As a simple example, consider a receiver that does not forcibly align its channel measurements to whole-second boundaries of system time. Such a device will produce its measurements at slightly different times with respect to the various timing markers in the incoming signal (epoch, subframe, and frame boundaries) for each different post-processing offset. As a result, the position solution at a given time point will differ slightly between adjacent post-processing runs until the offset size becomes smaller than the receiver’s granularity limit (one packet, one sample, and so on), at which point the outputs from successive offsets will become identical. Conversely, altering the starting point by even a single offset will result in a run sufficiently different from its predecessor to warrant its inclusion in a statistical population.
Application-to-Receiver Optimization
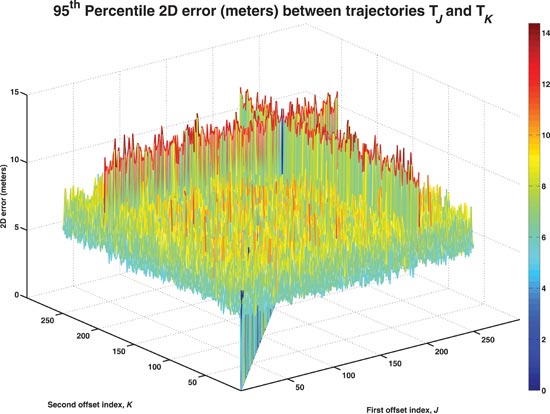
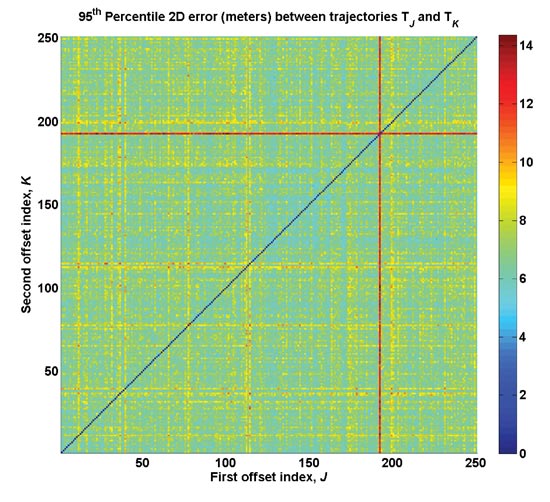
Once the independence and lower bound on observable error have been established for a particular set of post-processing parameters, the MOPP method becomes a powerful tool for finding unexpected corner cases in the receiver implementation under test. An example of this is shown in Figure 9, using the 95th percentile horizontal error as the statistical quantity of interest.
FIGURE 9. Identifying a rare corner case (upper: full view; lower: top view)
For this IF file, the “baseline” level for the 95th percentile horizontal error is approximately 6.7 meters. The trajectory generated by offset 192, however, exhibits a 95th percentile horizontal error with respect to all other trajectories of approximately 12.9 meters, or nearly twice as large as the rest of the data set. Clearly, this is a significant, but evidently rare, corner case — one that would have required a substantial amount of drive testing (and a bit of luck) to discover by conventional methods.
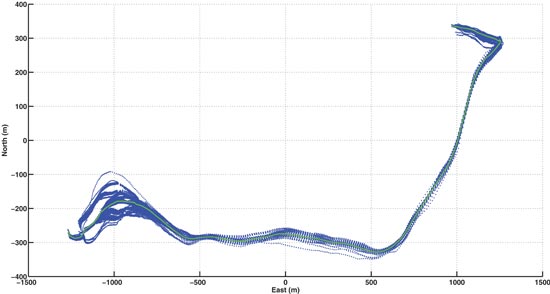
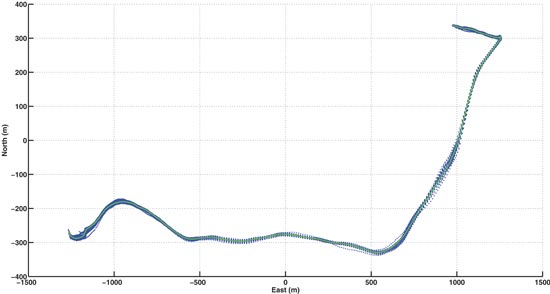
When an artifact of the type shown above is identified, the deterministic nature of software post-processing makes it straightforward to identify the particular conditions in the input signal that trigger the anomalous behavior. The receiver’s diagnostic outputs can be observed at the exact instant when the navigation solution begins to diverge from the truth trajectory, and any affected algorithms can be tuned or corrected as appropriate. The potential benefits of this process are demonstrated in Figure 10.
FIGURE 10. Before (top) and after (bottom) MOPP-guided tuning (blue = 256 trajectories; green = truth)
Limitations
While the foregoing results demonstrate the utility of the MOPP approach, this method naturally has several limitations as well. First, the IF replay process is not perfect, so a small amount of error is introduced with respect to the true underlying trajectory as a result of the post-processing itself. Provided this error is small compared to those caused by any corner cases of interest, it does not significantly affect the usefulness of the analysis — but it must be kept in mind.
Second, the accuracy of the replay (and therefore the detection threshold for anomalous artifacts) may depend on the RF environment and on the hardware profiling used during post-processing; ideally, this threshold would be constant regardless of the environment and post-processing settings.
Third, the replay process operates on a single IF file, so it effectively presents the same clock and front-end noise profile to all replay trajectories. In a real-world test including a large number of nominally identical receivers, these two noise sources would be independent, though with similar statistical characteristics. As with the imperfections in the replay process, this limitation should be negligible provided the errors due to any corner cases of interest are relatively large.
Conclusions and Future Work
The multiple offset post-processing method leverages the unique features of software GNSS receivers to greatly improve the coverage and statistical validity of receiver testing compared to traditional, hardware-based testing setups, in some cases by an order of magnitude or more. The MOPP approach introduces minimal additional error into the testing process and produces results whose statistical independence is easily verifiable. When corner cases are found, the results can be used as a targeted tuning and debugging guide, making it possible to optimize receiver performance quickly and efficiently.
Although these results primarily concern continuous navigation, the MOPP method is equally well-suited to tuning and testing a receiver’s baseband, as well its tracking and acquisition performance. In particular, reliably short time-to-first-fix is often a key figure of merit in receiver designs, and several specifications require acquisition performance to be demonstrated within a prescribed confidence bound. Achieving the desired confidence level in difficult environments may require a very large number of starts — the statistical method described in the 3GPP 34.171 specification, for example, can require as many as 2765 start attempts before a pass or fail can be issued — so being able to evaluate a receiver’s acquisition performance quickly during development and testing, while still maintaining sufficient confidence in the results, is extremely valuable.
Future improvements to the MOPP method may include a careful study of the baseline detection threshold as a function of the testing environment (open sky, deep urban canyon, and so on). Another potentially fruitful line of investigation may be to simulate the effects of physically distinct front ends by adding independent, identically distributed swaths of noise to copies of the raw IF file prior to executing the multiple offset runs.
Alexander Mitelman is GNSS research manager at Cambridge Silicon Radio. He earned his M.S. and Ph.D. degrees in electrical engineering from Stanford University. His research interests include signal quality monitoring and the development of algorithms and testing methodologies for GNSS.
Jakob Almqvist is an M.Sc. student at Luleå University of Technology in Sweden, majoring in space engineering, and currently working as a software engineer at Cambridge Silicon Radio.
Robin Håkanson is a software engineer at Cambridge Silicon Radio. His interests include the design of optimized GNSS software algorithms, particularly targeting low-end systems.
David Karlsson leads GNSS test activities for Cambridge Silicon Radio. He earned his M.S. in computer science and engineering from Linköping University, Sweden. His current focus is on test automation development for embedded software and hardware GNSS receivers.
Fredrik Lindström is a software engineer at Cambridge Silicon Radio. His primary interest is general GNSS software development.
Thomas Renström is a software engineer at Cambridge Silicon Radio. His primary interests include developing acquisition and tracking algorithms for GNSS software receivers.
Christian Ståhlberg is a senior software engineer at Cambridge Silicon Radio. He holds an M.Sc. in computer science from Luleå University of Technology. His research interests include the development of advanced algorithms for GNSS signal processing and their mapping to computer architecture.
James Tidd is a senior navigation engineer at Cambridge Silicon Radio. He earned his M.Eng. from Loughborough University in systems engineering. His research interests
include integrated navigation, encompassing GNSS, low-cost sensors, and signals of opportunity.
Seven technologies that put GPS in mobile phones around the world — the how and why of location’s entry into modern consumer mobile communications.
By Frank van Diggelen, Broadcom Corporation
Exactly a decade has passed since the first major milestone of the GPS-mobile phone success story, the E-911 legislation enacted in 1999. Ensuing developments in that history include:
Snaptrack bought by Qualcomm in 2000 for $1 billion, and many other A-GPS startups are spawned.
Commercial GPS receiver sensitivity increases roughly 30 times, to 2150 dBm (1998), then another 10 times, to 2160 dBm in 2006, and perhaps another three times to date, for a total of almost 1,000 times extra sensitivity. We thought the main benefit of this would be indoor GPS, but perhaps even more importantly it has meant very, very cheap antennas in mobile phones. Meanwhile:
Host-based GPS became the norm, radically simplifying the GPS chip, so that, with the cheap antenna, the total bill of materials (BOM) cost for adding GPS to a phone is now just a few dollars!
Thus we see GPS penetration increasing in all mobile phones and, in particular, going towards 100 percent in smartphones.
This article covers the technology revolution behind GPS in mobile phones; but first, let’s take a brief look at the market growth. This montage gives a snapshot of 28 of the 228 distinct Global System for Mobile Communications (GSM) smartphone models (as of this writing) that carry GPS.
Back in 1999, there were no smartphones with GPS; five years later still fewer than 10 different models; and in the last few years that number has grown above 200. This is that rare thing, often predicted and promised, seldom seen: the hockey stick!
The catalyst was E-911 — abetted by seven different technology enablers, as well as the dominant spin-off technology (long-term orbits) that has taken this revolution beyond the cell phone.
In 1999, the Federal Communications Commission (FCC) adopted the E-911 rules that were also legislated by the U.S. Congress. Remember, however, that E-911 wasn’t all about GPS at first.
It was initially assumed that most of the location function would be network-based. Then, in September 1999, the FCC modified the rules for handset technologies. Even then, assisted GPS (A-GPS) was only adopted in the mobile networks synchronized to GPS time, namely code-division multiple access (CDMA) and integrated digital enhanced network (iDEN, a variant of time-division multiple access).
The largest networks in the world, GSM and now 3G, are not synchronized to GPS time, and, at first, this meant that other technologies (such as enhanced observed time difference, now extinct) would be the E-911 winners. As we all now know, GPS and GNSS are the big winners for handset location. E-911 became the major driver for GPS in the United States, and indirectly throughout the world, but only after GPS technology evolved far enough, thanks to the seven technologies I will now discuss.
Technology #1. Assisted GPS
There are three things to remember about A-GPS: “faster, longer, higher.” The Olympic motto is “faster, stronger, higher,” so just think of that, but remember “faster, longer, higher.”
The most obvious feature of A-GPS is that it replaces the orbit data transmitted by the satellite. A cell tower can transmit the same (or equivalent) data, and so the A-GPS receiver operates — faster.
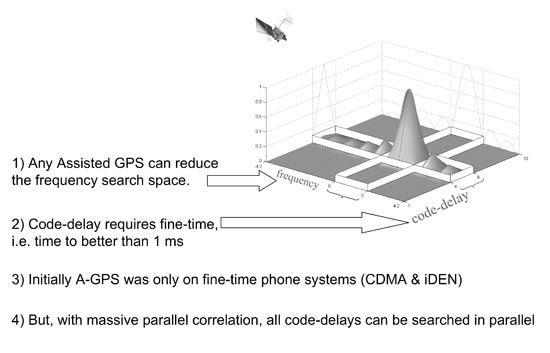
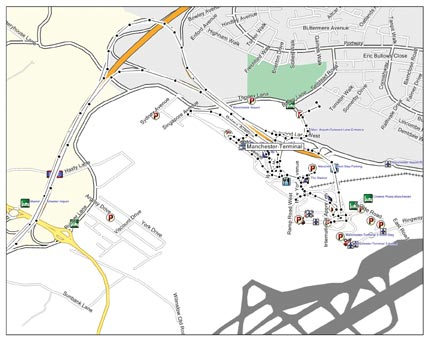
The receiver has to search over a two-dimensional code/frequency space to find each GPS satellite signal in the first place. Assistance data reduces this search space, allowing the receiver to spend longer doing signal integration, and this in turn means higher sensitivity (Figure 1). Longer, higher.
FIGURE 1. A-GPS: reduced search space allows longer integration for higher sensitivity.
Now let’s look at this code/frequency search in more detail, and introduce the concepts of fine time, coarse time, and massive parallel correlation. Any assistance data helps reduce the frequency search. The frequency search is just as you might scan the dial on a car radio looking for a radio station — but the different GPS frequencies are affected by the satellite motion, their Doppler effect. If you know in advance whether the satellite is rising or setting, then you can narrow the frequency-search window.
The code-delay is more subtle. The entire C/A code repeats every millisecond. So narrowing the code-delay search space requires knowledge of GPS time to better than one millisecond, before you have acquired the signal. We call this “fine-time.”
Only two phone systems had this time accuracy: CDMA and iDEN, both synchronized to GPS time. The largest networks (GSM, and now 3G) are not synchronized to GPS time. They are within 62 seconds of GPS time; we call this “coarse-time.” Initially, only the two fine-time systems adopted A-GPS. Then came massive parallel correlation, technology number two, and high sensitivity, technology number three.
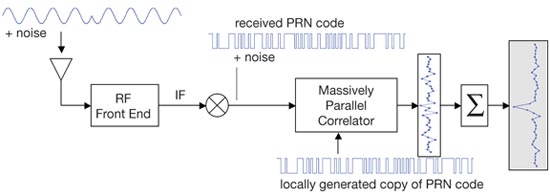
#2, #3. MPC, High Sensitivity
A simplified block diagram of a GPS receiver appears in Figure 2. Traditional GPS (prior to 1999) had just two or three correlators per channel. They would search the code-delay space until they found the signal, and then track the signal by keeping one correlator slightly ahead (early) and one slightly behind (late) the correlation peak. These are the so-called “early-late”correlators.
FIGURE 2. Massive parallel correllation.
Massive parallel correlation is defined as enough correlators to search all C/A code delays simultaneously on multiple channels. In hardware, this means tens of thousands of correlators. The effect of massive parallel correlation is that all code-delays are searched in parallel, so the receiver can spend longer integrating the signal whether or not fine-time is available.
So now we can be faster, longer, higher, regardless of the phone system on which we implement A-GPS.
Major milestones of massive parallel correlation (MPC):
In 1999, MPC was done in software, the most prominent example being by Snaptrack, who did this with a fast Fourier transform (FFT) running on a digital signal processor (DSP). The first chip with MPC in hardware was the GL16000, produced by Global Locate, then a small startup (now owned by Broadcom).
In 2005, the first smartphone implementation of MPC: the HP iPaq used the GL20000 GPS chip. Today MPC is standard on GPS chips found in mobile phones.
#4. Coarse-Time Navigation
We have seen that A-GPS assistance relieves the receiver from decoding orbit data (making it faster), and MPC means it can operate with coarse-time (longer, higher).
But the time-of-week (TOW) still needed to be decoded for the position computation and navigation: for unambiguous pseudoranges, and to know the time of transmission. Coarse-time navigation is a technique for solving for TOW, instead of decoding it. A key part of the technique involves adding an extra state to the standard navigation equation, and a corresponding extra column to the well known line-of-sight matrix.
The technical consequence of this technique is that you can get a position faster than it is possible to decode TOW (for example, in one, two, or three seconds), or you can get a position when the signals are too weak to decode TOW. And a practical consequence is longer battery life: since you can get fast time-to-first-fix (TTFF) always, without frequently waking and running the receiver to maintain it in a hot-start state.
#5. Low Time-of-Week
A parallel effort to coarse-time navigation is low TOW decode, that is, lowering the threshold at which
it is possible to decode the TOW data. In 1999, it was widely accepted that -142 dBm was the lower limit of signal strength at which you could decode TOW. This is because -142 dBm is where the energy in a single data bit is just observable if all you do is integrate for 20 ms.
However, there have evolved better and better ways of decoding the TOW message, so that now it can be done down to -152 dBm. Today, different manufacturers will quote you different levels for achievable TOW decode, anywhere from -142 to -152 dBm, depending on who you talk to. But they will all tell you that they are at the theoretical minimum!
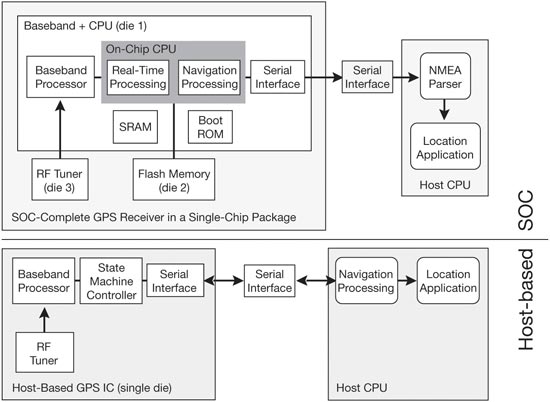
#6, #7. Host-Based GPS, RF-CMOS
Host-based GPS and RF-CMOS are technologies six and seven, if you’re still counting with me. We can understand the host-based architecture best by starting with traditional system-on-chip (SOC) architecture. An SOC GPS may come in a single package, but inside that package you would find three separate die, three separate silicon chips packaged together: A baseband die, including the central processing unit (CPU); a separate radio frequency tuner; and flash memory. The only cost-effective way of avoiding the flash memory is to have read-only memory (ROM), which could be part of the baseband die — but that means you cannot update the receiver software and keep up with the technological developments we’ve been talking about. Hence state-of-the-art SOCs throughout the last decade, and to date, looked like Figure 3.
FIGURE 3. Host-based architecture, compared to SOC.
The host-based architecture, by contrast, needs no CPU in the GPS. Instead, GPS software runs on the CPU and flash memory already present on the host device (for example, the smartphone). Meanwhile, radio-frequency complementary metal-oxide semi-conductor (RF-CMOS) technology allowed the RF tuner to be implemented on the same die as the baseband. Host-based GPS and RF- CMOS together allowed us to make single die GPS chips.
The effect of this was that the cost of the chip went down dramatically without any loss in performance.
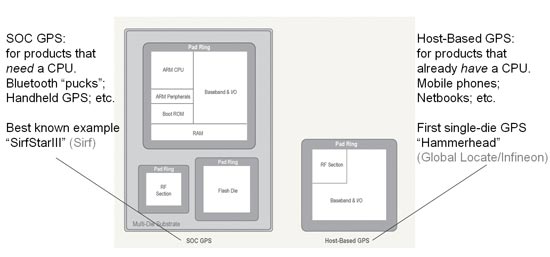
Figure 4 shows the relative scales of some of largest-selling SOC and host- based chips, to give a comparative idea of silicon size (and cost). The SOC chip (on the left) is typically found in devices that need a CPU, while the host-based chip is found in devices that already have a CPU.
FIGURE 4. Relative sizes of host-based, compared to SOC.
In 2005, the world’s first single-die GPS receiver appeared. Thanks to the single die, it had a very low bill of materials (BOM) cost, and has sold more than 50 million into major-brand smartphones and feature phones on the market.
Review
We have seen that E-911 was the big catalyst for getting GPS into phones, although initially only in CDMA and iDEN phones. E-911 became the driver for all phones once GPS evolved far enough, thanks to the seven technology enablers:
A-GPS >> faster, longer, higher
Massive parallel correlation >> longer, higher with coarse-time
High-sensitivity >> cheap antennas
Coarse time navigation >> fast TTFF without periodic wakeup
Low TOW >> decode from weak signals
Host-based GPS, together with
RF-CMOS g single die.
Meanwhile, as all this developed, several important spin-off technologies evolved to take this technology beyond the mobile phone. The most significant of all of these was long-term orbits (LTO), conceived on May 2, 2000, and now an industry standard.
Long-Term Orbits
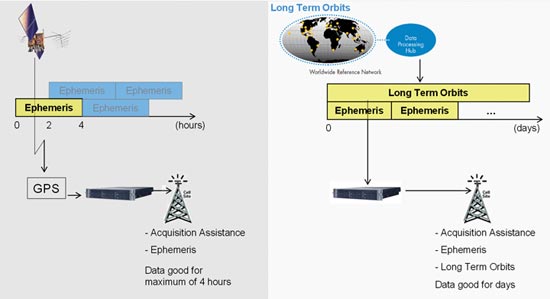
Why May 2, 2000? Remember what happened on May 1, 2000: the U.S. government turned off selective availability (SA) on all GPS satellites. Suddenly it became much easier to predict future satellite orbits (and clocks) from the observations made by a civilian GPS network. At Global Locate, we had just such a network for doing A-GPS, as illustrated in Figure 5. On May 2 we said, “SA is off — wow! What does that mean for us?”And that’s where LTO for A-GPS came from.
FIGURE 5. Broadcast ephemeris and long-term orbits.
Figure 5 shows the A-GPS environment with and without LTO. The left half shows the situation with broadcast ephemeris only. An A-GPS reference station observes the broadcast ephemeris and provides it (or derived data) to the mobile A-GPS receiver in your mobile phone. The satellite has the orbits for many hours into the future; the problem is that you can’t get them.
The blue and yellow blocks in the diagram represent how the ephemeris is stored and transmitted by the GPS satellite. The current ephemeris (yellow) is transmitted; the future ephemeris (blue) is stored in the satellite memory until it becomes current. So, frustratingly, even though the future ephemeris exists, you cannot ordinarily get it from the GPS system itself.
The right half of the figure shows the situation with LTO. If a network of reference stations observes all the satellites all the time, then a server can compute the future orbits, and provide future ephemeris to any A-GPS receiver. Using the same color scheme as before, we show here that there are no unavailable future orbits; as soon as they are computed, they can be provided. And if the mobile device has a fast-enough CPU, it can compute future orbits itself, at least for the subset of satellites it has tracked.
Beyond Phones. This idea of LTO has moved A-GPS from the mobile phone into almost any GPS device. Two of most interesting examples are personal navigation devices (PNDs) in cars, and smartphones themselves that continue to be useful gadgets once they roam away from the network. Now, of course, people were predicting orbits before 2000 — all the way back to Newton and Kepler, in fact. It’s just that in the year 2000, accurate future GPS orbits weren’t available to mobile receivers. At that time, the International GNSS Service (IGS) had, as it does now, a global network of reference stations, and provided precise GPS orbits organized into groups called Final, Rapid and Ultra-Rapid. The Ultra-Rapid orbit had the least latency of the three, but, in 2000, Ultra-Rapid meant the recent past, not the future.
So for LTO we see that the last 10 years have taken us from a situation of nothing available to the mobile device, to today where these long-term orbits have become codified in the 3rd Generation Partnership Project (3GPP) and Secure User Plane Location (SUPL) wireless standards, where they are known as “ephemeris extension.”
Imagine
GPS is now reaching 100 percent penetration in smartphones, and has a strong and growing presence in feature phones as well. GPS is now in more than 300 million mobile phones, at the very least; credible estimates range above 500 million.
Now, imagine every receiver ever made since GPS was created 30 years ago: military and civilian, smart-bomb, boat, plane, hiking, survey, precision farming, GIS, Bluetooth-puck, personal digital assistant, and PND. In the last three years, we have put more GPS chips into mobile phones than the cumulative number of all other GPS receivers that have been built, ever!
Frank van Diggelen has worked on GPS, GLONASS, and A-GPS for Navsys, Ashtech, Magellan, Global Locate, and now as a senior technical director and chief navigation officer of Broadcom Corporation. He has a Ph.D. in electrical engineering from Cambridge University, holds more than 45 issued U.S. patents on A-GPS, and is the author of the textbook A-GPS: Assisted GPS, GNSS, and SBAS.
Recent attention given to aging GPS satellites and availability gaps from lagging constellation replenishment have provoked deep concern, particularly within the aviation community. Available remedies include exploitation of well known but unused methods plus new techniques; those discussed here have future relevance, with or without availability gaps.
Even with far greater coverage from multiple GNSS, crises could emerge from severely stronger interference levels or other unforeseen events. Advance preparation for any such occurrence would avoid the waste, confusion, and blind alleys that generally arise with the sudden appearance of an emergency.
GPS lives up to expectations, brilliantly performing as advertised. Even that best-ever performance must and does have tolerance for occasional error; examples, though rare, are well documented. To live with less than perfect performance, the industry relies on integrity testing: comparison checks using extra satellites to detect inconsistencies and exclude questionable data.
Nevertheless, it is universally recognized that GNSS, even with existing fault detection and isolation or exclusion (FDI/FDE), is still not perfect. The ramifications of growing dependence on GPS have thus attracted more attention. The overall subject can be subdivided into general areas involving the likelihood of:
reduced availability and
reduced dependability (integrity, its verification, plus backup).
Although I mainly address the first topic here, the second unavoidably intertwines itself, making it difficult to keep them separate. Despite wide acclaim for the excellent 2001 Volpe Report, commitment to a key means of backup for GPS remains unclear at this time. Possibility of a shortfall calls for a review of both existing methods and procedures, and possible means for closing the gap.
Current Methods
Today’s air traffic management designs demand constant replenishment of instantaneous position by full fixes.
Full Fix 1 RAIM. When each data vector must be a self-sufficient source of instantaneous position, a requirement arises for enough satellite sightline directions with geometric spread at all times. That interdependence is magnified when more satellites are added to provide FDI/FDE, requiring every subset of four within the enlarged group to support the requisite geometry. With this all-or-nothing posture, data lapses form a major stumbling block. A data gap that is only partial equates to a loss of GPS.
Position-Oriented Approach. Especially at high speeds, as in flight, instantaneous position is highly perishable. With little or no emphasis placed on accurate dynamics (beginning with velocity), demand for continuously accurate instantaneous position is highly dependent on abundant data. That abundance includes sufficiently high data rates, since latency becomes a significant liability without usage of a dynamic file.
Carrier Phase (Classical). Successful use of carrier-phase information is decades old. Although ambiguity resolution is not required in all carrier-phase applications, requirements for cycle-slip detection are quite common. More common yet — in fact, virtually ubiquitous — is the need to maintain phase continuity via a carrier-track loop. When those needs are satisfied, sub-wavelength instantaneous position is obtainable. Challenges involved, however, have produced among users a wide variation in perception of value. Some negative perceptions have arisen due to cutting corners in formation of carrier phase, or merely settling for delta range, by some receivers. Further, a cycle slip, even if only rarely overlooked, can be catastrophic in some operations.
Imperfect Validation. As already noted, verification is not my main topic here, but the issue is inescapable. Shortcomings include hard evidence of certification improperly bestowed, and severe limitations of go/no-go criteria (as with an automobile’s dashboard warning lights, we can learn if a performance trait is unsatisfactory — but a trivial excess produces the same indication as an imminent danger).
Necessary Changes
Extremely powerful and versatile means to improve performance have been available for a very long time. Kalman’s original paper, half a century ago, formalized an optimal way to achieve such performance. While Kalman estimation is commonly used today, its effective reach is almost invariably limited to data resident within each proprietary box of equipment.
The resources for providing centrally processed solutions for data from every source of information available, any combination of sources, any subset that may exclude any sensor or group, or any individual source in a federated configuration, are well known. Every conceivable choice from among these solutions can be made concurrently available; note the inherent backup.
However, all this capability is forsaken or lost by continued use of:
interfaces chosen poorly or from outdated standards;
undue consolidation within isolated equipment packaging;
overextended proprietary rights; and
limited, demonstrably flawed validation methods.
Drop Demands for Full Fix. An immediate explosion of benefits can follow from acceptance of partial information. Countless examples could be cited, but two obvious ones suffice:
Within GPS or GNSS, not all space vehicles (SVs) would be simultaneously affected by scintillation; ionospheric disturbance effects vary with both location and time. A similar case holds for multipath. Data from some SVs could be rejected, by decisions made external to a receiver, without forcing rejection of all.
Central processing — not within any one equipment box — has always offered potential for other sources (distance-measuring equipment or DME, and so on) to make up for incomplete sets of SV data.
My broad goal here is to take advantage of information not currently used and to prescribe corrective strategies. That objective has not been widely pursued due to perceived lack of urgency. GPS availability has thus far been more than satisfactory to a multitude of users — but that could change.
Availability Enhancements. For about two decades, the industry was effectively guided by a strong preference for the trait whereby every data refresh event was self-sufficient. A major reason for this was protection against gradual veering: a snapshot sequence is less sensitive than a continuously evolving path estimate. The cost, of course, is forfeit of benefits conferred by the sequence’s history. More recently, a middle ground was sought to mitigate the resulting loss; subfilters used as much new data as possible while making some use of knowledge from an estimator’s covariance matrix.
I promptly endorsed that approach and sought to carry it to the limit. A single-measurement receiver-autnomous integrity monitoring (RAIM) resulted, offering an independent integrity test for each separate observation. Despite its rigorous derivation, the technique is quite simple in practice. Further, it bridges a gap that formerly separated integrity test from optimal estimation, while also having significant advantages over conventional RAIM:
separation translates to independence from other satellites, and therefore from geometry (effective DOP of unity)
ability to use different error variances for different observations (for example, with nonuniformity in signal strength and/or elevation).
With this discussion, we have clearly left the realm of well-known subjects with self-evident prescriptions. Much of what follows likewise falls into the category of relatively obscure methods.
Beyond Position-Oriented. A time history
of GNSS observations, with or without an inertial measurement unit (IMU), inherently carries dynamic information. A file with observational history from multiple sources of course enables the aforementioned explosion of benefits. The obvious immediate offerings include:
closing of data lapses via information sharing;
intrinsic backup with automatic activation;
vast reduction of latency effects (for example, from 200 meters to less than 1 meter at 400 knots after 1 second, with easily obtainable velocity accuracy below 1 meter/second);
formation of 1-sigma projected future error (within reason).
Beyond these lie, once again, some lesser known techniques, including a few that are virtually nonexistent in operation at the time of this writing. With GNSS, the full potential of dynamics calls for a revisit of carrier phase.
Carrier-Phase Developments. Rather than pursuit of unnecessary sub-wavelength fixes for aircraft (for example, with 20-meter wing span moving at 400 knots), the true value of carrier phase in flight lies in enhanced dependability. Sequential changes in carrier phase over 1 second provide excellent dynamics information, with or without an IMU.
Recognition of this opportunity led to the concept of segmentation, whereby position is determined separately from dynamics. Carrier-phase sequential changes with ambiguities unresolved can provide precise (1-centimeter/second RMS with IMU; decimeter/second without) streaming velocity independent of position. Dead reckoning then provides a priori position correctible by pseudoranges.
One advantage of this scheme is subtle: with 1-second phase change propagation effects generally at 1 centimeter or less, no mask is needed. The geometry benefit is obvious, and flight experience has verified it. This raises another segmentation characteristic: the single-measurement integrity testing is applicable to each carrier-phase sequential change and to each pseudorange, separately and independently.
These capabilities are untapped in essentially all operational systems — air, land, and sea — and all stand to gain. Yet another opportunity can be added: ability to sustain operation even if every SV has repetitive data gaps. This advantage is best exploited with receivers described next.
FFT-Based Processing. Correlators and track loops in GNSS receivers can be replaced. The theory is age-old: multiplication in the frequency domain corresponds to convolution in time (and vice-versa). Thus a term-by-term product of a digitized receiver input’s fast Fourier transform (FFT) with the reference pattern’s FFT can, after an inverse FFT, provide outputs equivalent to full sets of correlator responses. Today’s processing and analog-to-digital converter capabilities offer feasibility.
In addition to reduced vulnerability to jamming (not covered here), advantages include:
access to all cells (not only a track loop’s subset)
guaranteed access (stability is not conditional)
linear phase-versus-frequency; no phase distortion.
Features from the preceding section, combined with these traits, offer extreme robustness.
Extension to Surveillance. The practice of transmitting responses to RF interrogations has, for many decades, been quite vulnerable to overload (garble; one user’s information is everyone else’s interference). One report described the unsurprisingly poor performance during the first Gulf War, and identified a remedy: squitters with separate assigned time slots, spontaneously firing the transponder transmitter without interrogation. Immediately, a sea change in capability offers every participant an opportunity to track every other participant. With no interrogations, garble would disappear.
This dramatic increase in capacity has been successfully demonstrated with the use of an existing communication link and existing airborne equipment: GPS receivers and Mode S squitters. Subsequently I enthusiastically advocated adoption of the technique with one fundamental modification: replace the data bits of the transmitted messages with measurements instead of coordinates.
Additional improvements include small shifts in time (reducing bits needed for time tags) and recomputation of measurements that would have occurred at the center of gravity (to mitigate rotation effects). Collectively, the full set of procedures offers a vast and compelling list of benefits.
Conclusions
Capability and dependability of navigation and surveillance can be enormously increased. The key lies not in new inventions nor provisions, but in use of newer methods, (among them, FFT-based receivers, segmented estimation, and 1-second carrier-phase changes) while abandoning habits such as:
dismissal of partial fix data
preoccupation with full fixes for instantaneous position irrespective of dynamics
preference for location pseudomeasurements rather than the measurements themselves
reliance on proprietary software in equipment boxes
RF interrogation/response sequences instead of squitters.
The industry can either adopt changes or continue to settle for performance levels at a minor fraction of the intrinsic capabilities available from our present and future systems.
James L. Farrell worked for 31 years at Westinghouse in design, simulation, and validation of navigation and tracking programs. He continues teaching and consulting for private industry, the Department of Defense, and university research through Vigil, Inc
ABB has selected Intergraph for the development of an oil and gas pipeline network and relevant facilities in North Africa. The pipeline network will be built in the El Merk field, a remote, harsh desert location in Algeria.
According to Intergraph, geospatial-based pipeline infrastructure management solutions will enable ABB to more effectively design, construct and maintain pipelines and assets and demonstrate a comprehensive pipeline integrity program while reducing the cost of maintaining records. By storing records in a central geographic information system (GIS), the solution makes information readily available for a variety of applications, improving record keeping productivity while assuring compliance with regulatory requirements.
“An accurate, up-to-date view of all critical assets at any given time is a crucial component of any pipeline implementation project,” said Sergio Casati, ABB Project Manager. “Especially in such challenging terrain conditions, we need to keep our pulse on the status of all assets in near real-time. The strength of Intergraph technology and its more than 40 years of experience in the utilities sector, as well as market leadership in enterprise engineering software, were key factors in our decision to partner with the company on this project. Intergraph’s open, flexible technology platform was also desirable for an initiative like the El Merk project, which involves a consortium of multiple vendors.”
The announcement said that geospatial technology from Intergraph will play a significant role in the design and installation of the pipeline, field gathering stations, gas distribution manifolds, flow and trunk lines and water and gas re-injection facilities in El Merk. The technology will support the Pipeline Open Data Standard (PODS) model, the most widely implemented pipeline data model in the industry, and all data will be stored in an Oracle Spatial database. The implementation will also include a portal component for the seamless distribution of data to all parties, including field and remote users.
“The collaboration of Intergraph with ABB Italy on this project marks a significant milestone in Intergraph’s involvement in the oil and gas pipeline industry,” said Maximilian Weber, Utilities & Communications manager for Intergraph in EMEA. “Intergraph has worked with leading pipeline providers around the world including Spectra Energy and Northwest Energy in the U.S., E.ON Ruhrgas in Germany and Chongqing Gas in China. Additionally, our Process, Power & Marine division is the world’s leading provider of enterprise engineering software for the design, construction and operation of plants, pipelines, ships and offshore facilities. We are pleased that ABB has recognized our strength in this industry and has chosen us to ensure the accurate, efficient management of assets, as well as play a key role in protecting this infrastructure.”
Photos from the GPS World Leadership Dinner 2009, September 24
ION GNSS 2009 Conference, Savannah, Georgia
Bradford W. Parkinson, the first GPS Program Office director, chief architect, and advocate for GPS, relates “The True Story of the Origins of the Global Positioning System” and pays tribute to many of the people he worked with during that time.A slide from Parkinson’s presentation, which drew from previously classified reports as early as 1964–66. A text version of his history lesson will appear in an upcoming GPS World magazine.Keynote speaker Brad Parkinson with the evening’s hostess, publisher Kristina Panter.It’s hard to tell which shines brighter, the crystal chandeliers in Savannah’s Olde Pink House ballroom, or the many GNSS luminaries in attendance. Also sponsoring the Leadership Dinner were ITT and Spirent (Silver), and Trimble (Bronze).Greg Turetzky of SiRF Technology shows off his newest chip to Javad Ashjaee and Tom Hunter of JAVAD GNSS.
Col. David Goldstein, GPS Wing, converses with Art Gower of Lockheed Martin and Len Jacobson, Global Systems and Marketing (both members of GPS World’s Advisory Board).Lockheed Martin Space Systems was a Gold Sponsor of the dinner. From left are Todd Bender, Mike Shaw, Nancy Fitzgerald, Dan Hennessey, Bob Wright, Tom Hollenbach, and Daniel Reigh.
(from left) Sherman Lo, Stanford; Dennis Akos, U. Colorado/CSR; Mikel Miller, U.S. Air Force, ION president.(from left) Tomoya Shibata, Copla Corp.; Hiroshi Nishiguchi, Japan GPS Council; John Wilde, DW International.(from left) Carl Andren, ION; Donna Reay, Galileo Supervisory Authority; Hermann Ebner, European Commission, Galileo Unit.(from left) Attila Komjathy, JPL; Thomas Pany, iFen GmbH; Chaminda Basnyake, GM; Tom Nagle, GPS Wing.
Wednesday evening, September 23, Savannah, Georgia, 5:30 to 7:00 p.m., Session P2b — a date that will live in GPS history. The 400 to 600 of us who were there to witness it will never forget it. The SVN-49 Review Panel.
Unprecedented puts it mildly.
The ION program read: “SVN49 (GPS IIR-M 20) was launched in March of 2009 to support GPS constellation sustainment as well as to bring into use the new third civil signal, the L5. During the early orbit check out of this satellite, out-of-family measurements were observed impacting the legacy GPS L1 and L2 signals. The panel will review the background, current status, issues, and options moving forward with SVN49.”
Col. David Goldstein, chief engineer, GPS Wing, gave a frank and open history and description of the situation. The panelists explained the options under consideration for partial fixes — a complete fix and eradication of the pseudorange error is not possible — and added a few remarks, but were mostly there to answer questions and provide perspective in response to opinions from the floor.
It reminded me — now this is a leap — of a climb I led in days of yore up Mt. Kilimanjaro. Or escorted, really; the Swahili-speaking Tanzanian porters did all the leading. About two days in and a third of the way up, we realized that because of a schedule change we had made earlier for longer safari in the Selous, we didn’t have quite enough time to climb the mountain in the accepted manner and still make it back down for the once-weekly flight out. So over muesli and mangos the next morning in the A-frame hut, I just threw it open to everyone and said, “It’s your trip. What do you want to do?”
Folks said later that in decades of group travel, they’d never seen the like.
Basically, that’s what Col. Goldstein, Col. Madden, and the GPS Wing did. Just threw it open. “It’s your signal. What do you want to do?”
The most likely solution may involve a partial adjustment to the signal, and then setting it useable with the caveat that it will not perform to the same degree of accuracy as other satellites, nor uniformly for all receivers.
Javad Ashjaee of JAVAD GNSS had an interesting suggestion, which basically amounted to what my teenagers sometimes tell me: “Deal.” That is, just turn it on, and away we go. Use the anomaly to study multipath phenomena. Of course, he is in the enviable postion of having, or producing, receivers that can separate out the so-called defined multipath element.
However it pans out, I commend the GPS Wing for taking such an open, public, and when you come right down to it, honest approach. I heard a bit of grumbling behind the scenes that some protocols were not adhered to in going so public. But you know what? That’s how things get done, as opposed to bogging down under cover.
And that Kili thing. We did make it up the mountain. Some of us. Sick as all getout from the altitude. Glad to come down. But we made it. Same’s gonna happen with this SVN.
AURORA BOREALIS seen from Churchill, Manitoba, Canada. Ionospheric scintillation research can benefit from this new method. (Photo: Aiden Morrison)Photo: Canadian Armed Forces
By Aiden Morrison, University of Calgary
Two broad user groups will find important consequences in this article:
Time synchronization and test equipment manufacturers, whose GPS-disciplined oscillators have excellent long-term performance but short- to medium-term behavior limited by the quality, and therefore cost, of the integrated quartz device. This article portends a family of devices delivering oven-controlled crystal oscillator (OCXO) performance down to the 10-millisecond level, with an oscillator costing pennies, rather than tens or hundreds of dollars. Applications include ionospheric scintillation research (above).
High-performance receiver manufacturers who design products for high-dynamic or high-vibration environments (see cover) where the contribution of phase noise from the local oscillator to velocity error cannot be ignored. In these areas, the strategy outlined here would produce equipment that can perform to higher specifications with the same or a lower-cost oscillator.
The trade-off requires two tracking channels per satellite signal, but this should not pose a problem. At ION GNSS 2009, manufacturers showed receivers with 226 tracking channels. There are currently only 75 live signals in the sky, including all of GPSL1/L2/L5 and GLONASS L1/L2. — Gérard Lachapelle
If the channel data within a GNSS receiver is handled in an effective manner, it is possible to form meaningful estimates of the local-oscillator phase deviations on timescales of 10 milliseconds (ms) or less. Moreover, if certain criteria are met, these estimates will be available with related uncertainties similar to the deviations produced by a typical oven-controlled crystal oscillator (OCXO). The processing delay required to form this estimate is limited to between 10 and 20 ms. In short, it becomes possible in near-real-time to remove the majority of the phase noise of a local oscillator that possesses short-term instability worse than an OCXO, using standalone GNSS. This represents both a new method to accurately determine the Allan deviation of a local oscillator at time scales previously impractical to assess using a conventional GNSS receiver, and the potential for the reduction in observable Doppler uncertainty at the output of the receiver, as well as ionospheric scintillation detection not reliant on an expensive local OCXO.
Concept. Inside a typical GNSS receiver, the estimate of the error in the local oscillator is formed as a component of the navigation solution, which is in turn based on the output of each satellite-tracking channel propagating its estimate of carrier and code measurements to a common future point. While this method of ensuring simultaneous measurements is necessary, it regrettably limits the resolution with which the noise of the local oscillator can be quantified, due to the scaling of non-simultaneous samples of local oscillator noise through the measurement propagation process. To bypass these shortcomings requires a method of coherently gathering information about the phase change in the local oscillator across all available satellite signals: to use the same samples simultaneously for all satellites in view to estimate the center-point phase error common across the visible constellation.
To explain how this is feasible, we must first understand the limitations imposed by the conventional receiver architecture, with respect to accurately estimating short-term oscillator behavior, and subsequently to determine the potential pitfalls of the proposed modifications, including processing delays needed for bit wipe-off, expected observation noise, and user dynamics effects.
Typical Receiver Shortfalls
In a typical receiver, while information about local time offset and local oscillator frequency bias may be recovered, information about phase noise in the local oscillator is distorted and discarded, as a consequence of scaling non-simultaneous observations to a common epoch.
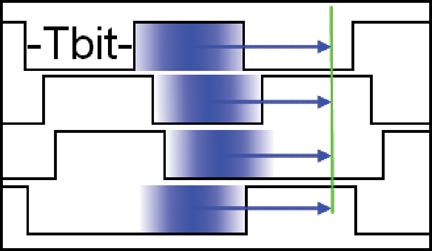
As shown in FIGURE 1, coherent summation intervals in a receiver are used to approximate values of the phase error, including oscillator phase, measured at the non-simultaneous interval centrers in each channel, which are then propagated to a common navigation solution epoch. Each channel will intrinsically contain a partially overlapping midpoint estimate of oscillator noise over the coherent summation interval that will then be scaled by the process of extrapolation. As these estimates are scaled and partially overlapping, they do not make optimal use of the information known about the effects of the local oscillator, and form a poor basis for estimating the contributions of this device to the uncertainty in the channel measurements. As shown in Figure 1, the phase error measured in each channel will be distorted by an over unity scaling factor.
FIGURE 1. Propagation and scaling of phase estimates within a typical receiver.
Depending on implementation decisions made by the designers of a given GNSS system, the average value of the propagation interval relative to the bit period will have different expected values. Assuming the destination epoch is the immediate end of the furthest advanced (most delayed) satellite bitstream, and that integration is carried out over full bit periods, the minimum propagation interval for this satellite would be ½-bit period.
For the average satellite however, the propagation delay would be this ½-bit period plus the mean skew between the furthest satellite and the bitstreams of other space vehicles. Ignoring further skew effects due to the clock errors within the satellites, which are typically limited well below the ms level, the skew between highest and lowest elevation GPS satellites for a user on the surface of earth would be approximately 10 ms. The average value of this skew due to ranging change over orbit, assuming an even distribution of satellites in the sky at different elevation angles, would therefore be 5 ms.
Combining the minimum value of the skew interval with the minimum propagation interval of the most delayed satellite yields a total average propagation interval of 15 ms. In turn, this gives a typical scaling factor of 1.75, used from this point forward when referring to the effects of scaling this quantity.
Proposed Implementation
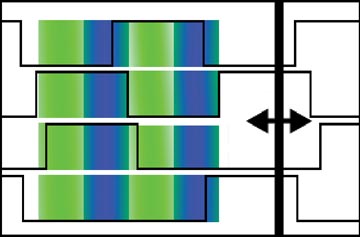
Overcoming limitations of a typical receiver requires recording the approximate bit-timing and history of each tracked satellite as well as a short segment of past samples. This retained data guarantees that the bit-period boundaries of the satellites will not pose an obstacle to forming common N-ms coherent periods between all visible satellites, over which simultaneous integration may proceed by wiping off bit transitions. Using this approach as shown in FIGURE 2, all available constellation signal power is used to estimate a single parameter, namely the epoch-to-epoch phase change in the local oscillator.
FIGURE 2. Common intervals over which to accurately estimate local oscillator phase changes.
Having viewed the existence of these common periods, it becomes evident that it is conceptually possible to form time-synchronized estimates of the phase contribution of the common system oscillator alternately across one N-ms time slice, then the next, in turn forming an unb
roken time series of estimates of the phase change of the system oscillator. Forming the difference between the adjacent discriminator outputs will provide the following information:
The ΔEps (change in the noise term in the local loop)
The ΔOsc (change in the phase of the local oscillator, the parameter of interest)
The ΔDyn (change in the untracked/residual of real and apparent dynamics of the local loop/estimator)
Noticing that term 1 may be considered entirely independent across independent PRNs (GPS, Galileo, Compass) or frequency channels (GLONASS), and that the value of term 3 over a 10-ms period is expected to be small over these short intervals, it becomes obvious that term 2 can be recovered from the available information. To determine the weighting for each satellite channel, the variance of the output of the discriminator is needed.
Performance Determination
To allow the realistic weighting of discriminator output deltas, it becomes desirable to estimate at very short time intervals the variance of the output of the phase discriminator. In the case of a 2-quadrant arctangent discriminator, this means one wishes to quantify the variance
Letting Q/I 5 Z, recall that if Y 5 aX then
Applying this to the variance of the input to the arctangent discriminator in terms of the in phase and quadrature accumulators, this would give
Rather than proceed with a direct evaluation from this point onward to determine the expression for the variance at the output of the discriminator, it is convenient to recognize that simpler alternatives exist since
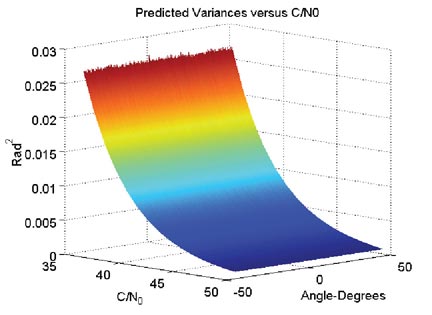
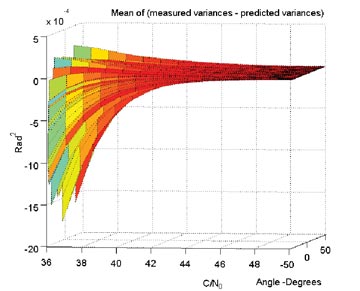
The implication is that since the slope of the arctangent transfer function is very nearly equal to 1 in the central, typical operating region, and universally less than 1 outside of this region, it is easy to recognize that the variance at the output of the arctangent discriminator is universally less than that at the input, and can be pessimistically quantified as the variance of the input, or σ2(Z). This assumption has been verified by simulation, its result shown in FIGURE 3, where the response has been shown after taking into account the effect of operating at a point anywhere in the range ±45 degrees. While the consequence of the simplification of the variance expression is an exaggeration of discriminator output variance, FIGURE 4 shows output variance is well bounded by the estimate, and within a small margin of error for strong signals.
FIGURE 3. Predicted variances at the output of the ATAN2 discriminator versus C/N0.FIGURE 4. Difference between actual and predicted variance at output of discriminator.
The gap between real and predicted output variance may also be narrowed in cases where Q>I by using a type of discriminator which interchanges Q and I in this case and adds an appropriate angular offset to the output as
Proceeding in this vein, the next required parameter is the normalized variance of the in-phase and quadrature arms.
The carrier amplitude A can be roughly approximated as
Resulting in a carrier power C
Further, the noise power is given as
Expressing bandwidth B as the inverse of the coherent integration time, and rearranging now gives noise density N0 as
Combining this expression, and the one previously given for the carrier power C results in the following expression for the carrier to noise density ratio:
This latest expression can be rearranged to find the desired variance term. Assuming the 10-ms coherent integration time discussed earlier is used, this yields
Normalizing for the carrier amplitude gives the normalized variance in terms of radians squared:
In any situation where the carrier is sufficiently strong to be tracked, it is likely that the carrier power term employed above can be gathered from the immediate I and Q values, ignoring the contribution of the noise term to its magnitude.
Oscillator Phase Effect. Determining the expected magnitude of the local oscillator phase deviation requires only three steps, assuming that certain criteria can be met. The first requirement is that the averaging times in question must be short relative to the duration, at which processes other than white phase and flicker phase modulation begin to dominate the noise characteristics of the oscillator. Typically the crossover point between the dominance of these processes and others is above 1 s in averaging interval length, when quartz oscillators are concerned. Since this article discusses a specific implementation interval of 10 ms within systems expected to be using quartz oscillators, it is reasonable to assume that this constraint will be met.
The second requirement is that the Allan deviation of the given system oscillator must be known for at least one averaging interval within the region of interest. Since the Allan deviation follows a linear slope of -1 with respect to averaging interval on a log-log scale within the white-phase noise region, this single value will allow an accurate prediction of the Allan deviation at any other point on the interval and, in turn, of the phase uncertainty at the 10 ms averaging interval level.
Letting σΔ(τ) represent the Allan deviation at a specific averaging interval, recall that this quantity is the midpoint average of the standard deviation of fractional frequency error over the averaging interval τ. Scaling this quantity by a frequency of interest results in the standard deviation of the absolute frequency error on the averaging interval:
By integrating this average difference in frequency deviations over the coherent period of interest, one obtains a measure of the standard deviation in degrees, of a signal generated by this reference:
Note that the averaging interval τ must be identical to the coherent integration time.
Turning to a practical example, if the oscillator in question has a 1 s Allan Deviation of 1 part per hundred billion (1 in 1011), a stability value between that of an OCXO and microcomputer compensated crystal oscillator (MCXO) standard, and shown to be somewhat pessimistic, this would scale linearly to be 1e-9 at a 10-ms averaging interval, under the previous assumption that the oscillator uncertainty is dominated by the white phase-noise term at these intervals. Also, for illustration purposes, if one assumes the carrier of interest to be the nominal GPS L1 carrier, the uncertainty in the local carrier replica due to the local oscillator over a 10-ms coherent integration time becomes
When stated in a more readily digested format, this represents roughly 15 centimeter/second in the line-of-sight velocity uncertainty. In an operating receiver, two additional factors modify this effect. The first is the previously discussed scaling effect that will tend to exaggerate this effect by a typical factor of 1.75, as previously discussed. The second factor is that this noise contribution is filtered by the bandwidth-limiting effects of the local loop filter, producing a modification to the noise affecting velocity estimates, as well as reduced information about the behaviour of the local oscillator.
Impact of Apparent Dynamics. When considering the error sources within the system, it is important to realize which individual sources of error will contribute to estimation errors, and which will not. One area of potential concern would appear to be the errors in the satellite ephemerides, encompassing both the satellite-orbit trajectory misrepresentation and the satellite clock error. While the errors in the satellite ephemerides are of concern for point positioning, they are not of consequence to this application, as the apparent error introduced by a deviation of the true orbit from that expressed in the broadcast orbital parameters does not affect the tracking of that satellite at the loop level.
Additionally, while the satellite clock will add uncertainty to the epoch-to-epoch phase change within each channel independently, the magnitude of this change is minimal relative to the contribution of uncertainty due to the variance at the output of the discriminator guaranteed by the low carrier-to-noise density ratio of a received GNSS signal. Since this contribution is uncorrelated between satellites and relatively small compared to other noise contributions affecting these measurements, even when compared to the soon-to-be-discontinued Uragan GLONASS satellites that had generally less stable onboard clocks, it is likely safe to ignore. When compared to the more stable oscillators aboard GPS or GLONASS-M satellites, it is a reasonable assumption that this will be a dismissible contribution to received signal-phase uncertainty change.
While atmospheric effects present an obstacle which will directly affect the epoch-to-epoch output of the discriminators, it is believed that under conditions that do not include the effects of ionospheric scintillation the majority of the contribution of apparent dynamics due to atmospheric changes will have a power spectral density (PSD) heavily concentrated below a fraction of 1 Hz. The consequence of this concentration is that the tracking loops will remove the vast majority of this contribution, and that the difference operator that will be applied between adjacent phase measurements, as in the case of dynamics, will nullify the majority of the remaining influence.
Impact of Real Dynamics. Real dynamics present constraints on performance, as do any tracking loop transients. For example, a low-bandwidth loop-tracking dynamics will have long-lasting transients of a magnitude significant relative to levels of local oscillator noise. For this reason it is necessary to adopt a strategy of using the epoch-to-epoch change in the discriminator as the figure of interest, as opposed to the absolute error-value output at each epoch. This can reasonably be expected to remove the vast majority of the effects of dynamics of the user on the solution.
To validate this assumption under typical conditions calls for a short verification example. Assuming the use of a second-order phase-locked loop (PLL) for carrier tracking, with a 10-Hz loop bandwidth the effects of dynamics on the loop are given by these equations:
Letting Bn be 10 Hz, one can write
Recall that the dynamic tracking error in a second-order tracking loop is given by
Given the choices above, this would result in a constant offset of 0.00281 cycles, or 1.011 degrees of constant tracking error due to dynamics, following from the relation between line-of-sight acceleration and loop bandwidth to tracking error. Since this constant bias will be eliminated by the difference operator discussed earlier, it is necessary to examine higher order dynamics.
Further, if one used a coherent integration interval of 10 ms as assumed earlier, and let the dynamics of interest be a jerk of 1 g/s, this results in a midpoint average of 0.005 g on this interval:
Substituting this result into equation 16 produces the associated change in dynamic error over the integration interval, which is in this case:
This value will be kept in mind when evaluating capabilities of the estimation approach to determine when it will be of consequence. As the estimation process will be run after a short delay, an existing estimate of platform dynamics could form the basis of a smoothing strategy to reduce this dynamic contribution further.
Estimated Capabilities
In the absence of the influence of any unmodeled effects, the expected performance of this method is dependent on only the number of satellite observables and their respective C/N0 ratios. Across each of these scenarios we assume for simplicity’s sake that each satellite in view is received at a common C/N0 ratio and over a common integration period of 10 ms.
If the assumption of minimal dynamic influences is met, the situation at hand becomes one in which multiple measures of a single quantity are present, each containing independent (due to CDMA or FDMA channel separation) noise influences with a nearly zero mean. When one can express the available data form:
x[n] = R + w[n]
where x[n] is the nth channel discriminator delta which includes the desired measure of the local oscillator delta (R), as well as w[n], a strong, nearly white-noise component, there are multiple approaches for the estimation of R.
The straightforward solution to estimate R in this case is to use the predicted variances of each measure to serve as an inverse weighting to the contribution of each individual term, followed by normalization by the total variance, as expressed by
Now, since it is desired to bound the uncertainty of the estimate of R, the variance of this quantity should also be noted. This uncertainty can be determined as
To determine the performance of the estimation method for a given constellation configuration, with specific power levels and available carrier signals, it is necessary to utilize the predicted variances plotted in Figure 3 as inputs to equations 20 and 21. To provide numerical examples of the performance of this method, three scenarios span the expected range of performance.
Scenario 1 is intended to be char-acteristic of that visible to a single-freq-uency GPS user under slight attenuation. It is assumed that 12 single-frequency satellites are visible at a common C/N0 of 36 dB-Hz, yielding from the simulation curves a value for each channel of 0.0265 rad2. When substituted into equation 24, this predicts an estimation uncertainty of
This is a level of estimation uncertainty similar to that assumed to be intrinsic to the local oscillator in the previous section. The result implies that with this minimally powerful set of satellites, it becomes possible to quantify the behavior of the local oscillator with a level of uncertainty commensurate with the actual uncertainty in the oscillator over the 10 ms averaging interval.
Consequentially, this indicates that the Allan deviation of this system oscillator could be wholly evaluated under these conditions at any interval of 10 ms or longer. Further, if the system oscillator were in fact the less stable MCXO from the resource above, this estimate uncertainty would be significantly lower than the actual uncertainty intrinsic to the oscillator, providing an opportunity to “clean” the velocity measurements.
Scenario 2 is intended to be characteristic of a near future multi-constellation single-frequency receiver. It is assumed that eight satellites from three constellations are visible on a single frequency each, with a common C/N0 of 42 dB-Hz, yielding a value for each channel of 6.4e-3 rad2, leading to an estimation uncertainty of
Scenario 3 is intended to serve as an optimistic scenario involving a future multi-frequency, multi-constellation receiver. It is assumed that nine future satellites are available from each of three constellations, each with four independent carriers, all received at 45 dB-Hz, yielding a value for each channel of 3.2e-3 rad2, leading to an estimation uncertainty of
Application to Observations
The theoretical benefit of subtracting these phase changes from the measurements of an individual loop prior to propagating that measurement to the common position solution epoch ranges from moderate to very high depending on the satellite timing skew relative to the solution point. The most beneficial scenario is total elimination of oscillator noise effects (within the uncertainty of the estimate), which is experienced in the special case (Case A, FIGURE 5), where the bit period of a given satellite falls entirely over two of the 10-ms subsections. The uncertainty would increase to 2x the level of uncertainty in the estimate in the special case (Case B) where the satellite bit period straddles one full 10-ms period and two 5-ms halves of adjacent periods, and would lie somewhere between 1 and 2 times the level of uncertainty for the general case where three subintervals are covered, yet the bit period is not centered (Case C).
FIGURE 5. Special cases of oscillator estimate versus bit-period alignment.
While the application to observations of the predicted oscillator phase changes between integration intervals does not appear immediately useful for high-end receiver users with the exception of those in high-vibration or scintillation-detection applications, it could be applied to consumer-grade receivers to facilitate the use of inexpensive system clocks while providing observables with error levels as low as those provided by much more expensive receivers incorporating ovenized frequency references.
Further Points
While the chosen coherent integration period may be lengthened to increase the certainty of the measurement from a noise averaging perspective, this modification risks degrading the usefulness of said measurement due to dynamics sensitivities. Additionally, as the coherent integration time is increased, the granularity with which the pre-propagation oscillator contribution may be removed from an individual loop will be reduced. While this may be useful in cases of very low dynamics where the system is intended to estimate phase errors in a local oscillator with high certainty, it would be of little use if one desires to provide low-noise observables at the output.
For this reason, it is recommended that increases in coherent integration time be approached with caution, and extra thought be given to use of dynamics estimation techniques such as smoothing, via use of the subsequent n-ms segment in the formation of the estimate of dynamics for the “current” segment. This carries the penalty of increased processing latency, but could greatly reduce dynamics effects by enabling their more reliable excision from the desired phase-delta measurements.
Acknowledgments
The author thanks his supervisors, Gerard Lachapelle and Elizabeth Cannon, and the Natural Sciences and Engineering Research Council of Canada, the Alberta Informatics Circle of Research Excellence, the Canadian Northern Studies Trust, the Association of Canadian Universities for Northern Studies, and Environment Canada for financial and logistical support.
AIDEN MORRISON is a Ph.D. candidate in the Position, Location, and Navigation (PLAN) Group, Department of Geomatics Engineering, Schulich School of Engineering at the University of Calgary, where he has developed a software-defined GPS/GLONASS receiver for his research.
A range of unrelated events in September show that GPS, the world’s preeminent GNSS, remains a work in progress.
The first in a series of deviations from normal GPS signal broadcasts during September was noted by researches at the University of New Brunswick, among others around the globe, who found that normal signals from the L1 and L2 transmitters on the GPS satellite PRN01/SVN49 were unavailable for more than two hours on the morning of September 4.
The satellite did not transmit useful signals on L1 and L2 from about 12:00 to 14:11 UTC, as reported by International GNSS Service stations in Europe. The L5 test signal continued to be tracked by some receivers but not others.
One possible explanation for the inability to track PRN01 is that the satellite rejected an upload and automatically went into non-standard mode, resulting in GPS receivers being unable to track the L1 and L2 signals. In other words, the L1/L2 transmitters were still on but transmitting a non-standard signal.
“It is not known for sure what actually happened with the satellite, but perhaps it is related to the ongoing issues with the signal reflections on the satellite and that the GPS Wing was conducting further tests,” said Richard Langley, GPS World’s Innovation editor and professor at the University of New Brunswick. “Luckily, the problem was short lived.” As to why some receivers continued to track the L5 signal but others did not, Langley speculates that some receivers may need to acquire and track the L1 signal before they can track the L5 test signal.
HDOP Warning. On September 10, the U.S. Coast Guard Navigation Center (USCG NavCen) issued a high dilution of precision (DOP) warning for certain locations in the U.S., Asia, and Oceania, reporting that GPS users might experience a temporary degradation in GPS reception in parts of the southwest and central United States from 13:02 UTC to 13:23 UTC on September 11.
“The warning is based on a best-four satellite scenario: what the DOPs would be if we only used the best four satellites (the combination providing the lowest DOP value) of all the satellites in view at a particular location,” said Langley.
“However, most civil receivers these days track eight or 10 or all satellites in view. I contacted the Coast Guard about this, and they did another analysis and confirmed DOP spikes for all-in-view users too. Prompted by that, I did my own analyses and found that with PRN31 out of action for the delta-V and PRN01 not yet declared healthy, only five satellites above 5 degrees elevation angle (and almost colinear in the sky) will be visible at the stated locations and times, resulting in GDOP spikes approaching 100!
“So, in this case, the warning is for all users in the affected areas, not just receivers with only four channels.”
Although a window stretching from 00:30 to 15:00 UTC had been allocated for the PRN31 delta-V maneuver, prompting the high DOP alert, the GPS Wing avoided any problem to users by delaying the start of the operation until 01:27 UTC and completing it in little more than one hour. The satellite was back on line by 02:37 UTC.
Sat Moves. After 22:00 UTC September 12, system operators began transitioning satellite SVN25 (PRN25) into the broadcast almanac for all satellites. Meanwhile, they moved satellite SVN24 (PRN24) out of the almanac.
The current GPS operation control system (OCS), known as AEP, cannot handle 32 satellites. However, the recent move gave rise to speculation that the maximum number of operable satellites has now been reduced from 31 to 30, for some reason. Apparently, the military cannot allow more than 30 space vehicles to be in active service at any one time. So when a new SV is activated, one must be deactivated. SVN24 will be placed in caretaker status, ready to be brought back on line should the situation change or the 30 SV limit be overcome.
Recent pronouncements by GPS Wing personnel on the benefits of the next operating system, OCX, have stated that it will be able to handle many more satellites, as many as 60. This figure now appears in doubt.
Russian Vision. Grigory Stupak and Mark Shmulevich reported Russia’s plans to restore a full GLONASS constellation of 30 space vehicles, laying out a road map leading to full interoperability with GPS. They envisaged a world orbited by 117 navigation satellites, with GLONASS operating alongside GPS, Galileo, and China’s COMPASS, supported by a further 29 augmentation satellites. That would certainly mitigate many of the vulnerabilities of GNSS due to propagation effects — but not those from interference in the frequency bands they will all share.
Solutions Sought to GNSS Vulnerabilities
Baska conference report by David Last
The second conference on GNSS Vulnerabilities and Solutions, September 2–5 in Baska, Croatia, focused on GNSS vulnerability to space weather, unintentional interference, jamming, and multipath propagation.
The conference was a joint venture by the Royal Institute of Navigation, London, and Nottingham University’s Institute of Engineering Surveying and Space Geodesy. Sixty-four delegates, mostly European, came from 21 countries.
Nearly half the papers focused on space weather and ionospheric and tropospheric propagation, taking in long-term and short-term solar effects, scintillation, signal attenuation, tropospheric delay variations, meteorological influences, and even gravity waves. The approach of the physicists was: Understand these things and maybe you can mitigate your vulnerability to them.
GNSS vulnerability can threaten safety-critical and mission-critical systems, including navigation in the air, maritime automatic identification systems, and the transportation of nuclear waste and other dangerous materials on land. Mitigations include EGNOS (the European WAAS) and GBAS (ground-based augmentation systems.)
Road Tolling. An unexpectedly hot topic was the enthusiasm of European governments to deploy road-user charging schemes based largely on GNSS technology. Some say road pricing is a rare and novel case of GNSS users who are hostile to the technology and seeking to exploit its vulnerability to the maximum. To enforce charges through the legal system may require levels of integrity approaching those of aircraft instrument-approach systems.
Suggestions for jamming defenses came mostly from Germany: Ulrich Engel and Angelika Hirrle proposed exciting new mathematical techniques to help separate GNSS signals from noise and interference, while Michael Felux sought refuge in low-cost inertial systems.
Hank Skalski of the U.S. Department of Transportation laid out U.S. government plans to detect and track down sources of GPS jamming. The SETS (Space Event Tracking System) will deploy aircraft, vans, fixed-base units, and trained technicians.
The U.S. Federal Aviation Administration (FAA) has certified Honeywell’s Smartpath precision-landing system for airport installations. As this magazine went to press, neither the FAA nor the Department of Transportation had issued an official release, but industry contacts were notified in mid-September.
The ground-based augmentation system provides aircraft with precise navigation data for CAT I approaches and landings, enabling closely spaced parallel and curved path approaches to increase airport capacity. It asserts improved navigation accuracy over instrument landing systems (ILS), using differential GPS and broadcasting both pseudorange corrections for each satellite in view as well as approach path information in a digital broadcast.
According to Honeywell, most current-production Airbus and Boeing aircraft now carry GBAS avionics or offer it as an option. Future Smarpath upgrades include the ability for CAT III approaches.
Arctic Passage Traversed by Merchant Ships
Two German merchant ships traversed the Northeast Passage from South Korea, leaving in late July, to Siberia, and plan to continue their journey to Rotterdam in the Netherlands.
A sea lane traditionally blocked by heavy ice floes or solid sheet ice, this route has opened because of to global warming. In 2007, Arve Dimmen, director of maritime safety for Norway’s Coastal Administration, told the U.S. National Space-Based Positioning, Navigation, and Timing Advisory Board that disappearing ice across the Arctic poses potential threats: 25 percent of undiscovered oil resources lie in that region, and the route could now be used by supertankers and large container ships, as it is more economical and less time-consuming.
Precision navigation faces more challenges north of the Artic Circle, from atmospheric affects in polar regions and the low elevation of SBAS satellites at those latitudes. A June 2009 study on GNSS use in the high Arctic by Richard Langley, however, found that conventional horizontal (marine) navigation works well north of the Arctic Circle. Still, others held that “this is another reason why eLoran is so important: someone at USCG/State/Commerce needs to use this as a wake-up call!”
Created from nearly 200 Envisat scenes, this Arctic mosaic reveals that the most direct route of the Northwest Passage (the orange line) across northern Canada is fully navigable. The blue line traces the Northeast Passage along the Siberian coast, which is only partially obstructed by ice; see story, page 16. Envisat advanced synthetic aperture radar mosaic produced by the Danish National Space Center.
The most widely used of all GPS devices are in-car navigators. When vehicles carrying navigators are used for criminal purposes, records contained in the devices may be examined. Such investigations rely on newly developed forensic techniques that employ a combination of computer expertise and navigation knowledge, yielding valuable data for crime investigators.
Evidence from GPS-based tracking systems now fitted to a wide range of vehicles can be of even greater value. These installations, many of them covert, provide a history of vehicle movements. Forensic analysis of such records can provide evidence of considerable value in crime detection.
Whilst the principal purpose of vehicle-tracking systems is generally to provide real-time information for efficient fleet control, they also serve an important security function. By continuously displaying up-to-date location information and identifying vehicles that deviate from planned routes or cross specific boundaries, they help protect assets that include the vehicles themselves and their high-value contents. Vehicle-tracking systems now constitute one of the most important GPS applications for our society.
The recent appearance of readily available, low-cost GPS jamming devices presents a real and immediate threat to all such tracking and security systems. Criminals now employ jammers that can block both GPS reception and GSM in Europe, and U.S. and other mobile phone systems throughout the world, rendering vulnerable the use of GPS in critical security applications. Other global satellite navigation systems (GNSS) in development will likely share that vulnerability. While not yet deployed for criminal purposes, spoofers that mimic GNSS signals will pose an even greater threat to vehicle security than jammers.
Alternative technologies, including enhanced Loran (eLoran), for vehicle navigation and tracking are not vulnerable to these threats, and promise a degree of protection to vehicle-tracking and recovery systems. These solutions will likely play an increasing role as GNSS jamming and spoofing activity increases.
Vehicle Navigators
Vehicle navigators often contain large numbers of records created by their users. These may show where they have been, how they got there, and a great deal more of value to investigators.
The destinations stored in car navigators can be extracted, listed, and plotted. It is now possible to do this for virtually all makes and models of device, whether after-market installations or built in by the manufacturer. Such examinations must be conducted with great care, to maintain high forensic standards so the evidence will stand up in court. It is also essential to preserve that evidence. This requires screening receivers from incoming satellite signals during the examination; this can be very difficult to achieve given the exceptionally high sensitivity of current GPS receivers!
Some car navigators disclose a great deal of information: who owns them; multiple addresses; a home address plus favorite addresses; destinations visited most frequently or most recently; the language spoken by the user, and other preferences; whether the user travels abroad; and occasionally telephone calls made and received. Some units even contain a detailed record of journeys stretching back over months, each point timed and dated (see Figure 1). These can provide compelling evidence of criminal activity.
Figure 1. Detailed tracks of routes travelled by a vehicle, each point dated and timed.
Tracking systems
Probably the most impressive forensic evidence involving GPS comes from the tracking systems now fitted to increasing numbers of trucks, trailers, delivery vans, and rental cars. Each vehicle carries a receiver that records its location and sends it at intervals to a tracking center via mobile phone data services. The tracking center may store, process, and display the data on a map, and raise an alarm if a high-value cargo deviates from its planned route or if a rental car is about to be exported illegally. Many of these tracking installations are covert and very difficult to discover.
When the police seize a tracking record, a forensic expert must audit the data in various ways, shown in blue in Figure 2. These focus on the many parts of the system the tracking company does not control. Tracking companies generally do not check the quality and accuracy of GPS at the time, and in the place, of a crime. A navigation professional, accustomed to dealing with high-integrity safety-of-life systems, can bring valuable experience to examining tracking records.
Figure 2. Vehicle tracking system with checks (in blue) to establish quality of evidence.
It is also often necessary to estimate the accuracy of GPS fixes. Doing so may require analysis of complex situations. An example would be the GPS receiver in a covert tracking system, with its antenna hidden deep inside the vehicle, perhaps behind the dashboard. The vehicle itself might be surrounded by tall buildings that block and reflect satellite signals. This is a novel and fascinating area where navigation and forensic science meet!
GPS Jamming
The use of GPS jammers, long foreseen in navigation circles, has become a reality as criminals employ them to overcome tracking systems and steal vehicles. These low-powered transmitters (see photo), readily available over the Internet for as little as $150, can block GPS reception in a vehicle’s vicinity.
GNSS satellites transmit no more power than a car headlight, yet must illuminate nearly half the Earth’s surface from 20,000 kilometers above it. Signals reaching a receiver are easily swamped by even a thousandth of a watt of jamming signal radiated near by.
Figure 3 shows the spectrum of the signal radiated by the low-power jammer in the photo above it, plotted across a 100 MHz frequency range centred on the GPS L1 frequency at 1575.42 MHz. The total power this jammer radiates is only about one tenth of a milliwatt, yet that is sufficient to block commercial GPS receivers over a few meters range — all the criminals need.
Low-power GPS jammer.Figure 3. Signal spectrum radiated by low-power jammer.
GPS/Phone Jammers
If a vehicle is to be completely screened from electronic tracking, not only must GPS be disabled in its vicinity, so must mobile phones as well. If not, they can be used to call for assistance; they can also be tracked using cell-site analysis methods. To prevent that, a jammer (see adjacent PHOTO) can block not only GPS reception but also that of all the mobile phone bands used in the area. The spectra of the jamming signals radiated by this device are designed to cover the frequency bands in which European 900 MHz, 1800 MHz, and 3G base stations transmit, so preventing mobiles from receiving them and establishing communications.
Recently, much more powerful jammers have appeared on the market (see adjacent photo). These radiate approximately two watts on each frequency, a power level some 20,000 times greater than the low-power jammer — and more powerful than the transmitter employed recently in official UK tests of effects on shipping of jamming GPS over a sector of the North Sea up to 30 kilometers from the jammer. A two-watt jammer could interfere over a substantial area.
Other GNSS
The spectrum in Figure 3 of the jamming signal of the simple low-power device extends from approximately 1563 MHz to 1600 MHz. Towards the center of this band is the civil GPS signal, approximately 2 MHz wide. The jammer also covers the 20-MHz-wide military P/Y signal, the yellow block. The slightly wider blue block represents L1 signals planned for Galileo, so this device would serve as a Galileo jammer, too. Its spectrum covers only the low end of the (purple) GLONASS bands, but other similar devices on the market jam that as well.
It is often argued that, since Galileo will use more than one frequency band, simply jamming L1 would not prevent Galileo reception. However, the bottom photo shows a jammer that has recently come onto the market, with two transmissions: one covering L1; the other, at a higher power, covering the L2 band. Adding L5 would be trivial. These are the frequency bands in which present and planned GNSS operate.
The jammers presented here are relatively simple and crude, but highly effective in preventing the operation of civil GPS receivers. They are readily available and are certainly being sold and being used. They render our GNSS-based security systems vulnerable to attack.
More seriously, I believe that it is now technically feasible, though apparently not yet within the capabilities of criminals, to spoof GPS. When that happens, it will allow criminals to hi-jack and divert a vehicle whilst the tracking system shows it still following its planned route — no alarm will be raised. Vehicles will also be able to avoid purely GNSS-based road-user pricing systems.
From left: Jammer for GPS, GSM (900MHz), DCS (1800MHz), and 3G mobile bands; high-power jammer for GPS and mobile phone bands; L1 and L2 jammer.
Mitigation
All is not lost! In many countries, vehicle-tracking systems such as Datatrak are deployed that do not depend on GNSS. There are also vehicle recovery systems such as Tracker with its LoJack technology installed in police cars and helicopters. These systems are immune to GNSS jamming and spoofing. Of course, like all radio systems, they can be jammed. But they are orders of magnitude less vulnerable than GNSS, and jammers that targeted them would be easier to detect.
Dead-reckoning can also mitigate GNSS jamming. Many cars with built-in navigators carry heading sensors and wheel-rotation counters to cope with loss of GPS in tunnels and urban canyons. They are immune to jamming, at least for short periods and distances. But they would not necessarily be immune to GNSS spoofing.
Enhanced Loran, or eLoran, offers a complete alternative navigation technology. Built into a GNSS receiver, it can take over seamlessly when GNSS is jammed, and replace precise GPS timing that currently keeps most of our telecommunications systems and the Internet running. There is great interest in this cost-effective insurance policy worldwide.
Conclusions
Legal and forensic aspects of GNSS grow ever more important, and their role more vital and successful in reducing crime. We must plan our responses to the vulnerability of our current and future GNSS-based security systems, which are now under attack. We must recognize these threats and encourage open and full discussion of them and of solutions to the dangers they pose.
DAVID LAST is the immediate past-president of the Royal Institute of Navigation, a consultant and expert witness on radio-navigation and communications systems to companies, governmental and international organizations, and criminal investigators.
The AsteRxi is the company’s first multi-sensor GNSS receiver. AsteRxi processes high-quality GNSS measurements with IMU-measurements to generate an enhanced integrated position.
“Traditionally, professional receivers have been integrated with expensive fiber-optic gyroscopes or similar inertial sensors, making solutions prohibitively expensive for many applications,” said Peter Grognard, managing director of Septentrio. “With the integration of the high-quality MEMS Inertial Measurement Units (IMUs) such as the MTi from Xsens with the high-precision AsteRx receivers, the benefits of integrated inertial/GNSS systems become available for a host of new industrial applications.”
Besides tracking GPS and GLONASS satellites, resulting in improved availability, the integration with IMU measurements allows AsteRxi to deliver precise position data in places where conventional GNSS receivers can’t. Additionally, the integrated solution provides position data at up to 50 Hz as well as attitude measurements, making it the ideal product for high-dynamic applications, delivering robust performance under obstructions, continuous operation under tree foliage, superior accuracy in urban canyons and much higher multipath rejection, the company said.
To optimally address technical and economical requirements of a variety of applications, AsteRxi is designed with an interface that facilitates integration by Septentrio of different IMU-sensors, depending on the application requirements. AsteRxi is delivered standard with Xsens IMUs.
AsteRx2eH Introduced. Septentrio also released the AsteRx2eH, a single-board dual-frequency GPS/GLONASS dual-antenna heading and position receiver designed for machine control, marine survey, photogrammetry, antenna pointing, and other demanding multi-antenna applications.
Asterx2eH provides reliable heading measurements without being susceptible to magnetic interference, or requiring constant recalibration to maintain its accuracy, the company said, adding that its single-board multi-antenna architecture provides unequalled performance and robustness for GNSS-based heading applications.
As member of the AsteRx-family of compact OEM and packaged GNSS receivers, AsteRx2eH is built around the same GNSS chipset and GPS and GLONASS tracking, and advanced signal processing and positioning algorithms for robust tracking and high-precision positioning, especially in challenging environments. Moreover, the electrical and communication interfaces are identical to those of other AsteRx series products, making integration of AsteRx2eH receivers easy, the company said.
“With the evolution of GPS and GLONASS systems and the proliferation of our heading technology into increasingly demanding applications, the added navigation signals offered by the different GNSS systems increase our product’s reliability and accuracy in any application,” Grognard said. “AsteRx2eH is the successor to our popular PolaRx2eH receiver. The more compact form-factor, which requires less power to operate, incorporates the superior performance capabilities of our latest ASIC technology, and all the other innovations that our AsteRx2e product family brings.”
Chefs from U.S. Air Force 746th Test Squadron GPS Test Center of Expertise cook up a winning formula for a booth display, a RECIPE of Resources, Experience, Capability, Innovation, Process, and Efficiency. Visitors were asked to solve an intriguing word puzzle to receive a delicious prize.GPS World’s booth offered a Wii bowling challenge for fun and exciting prizes.A young bowler from Bavaria (above) and ION President Mikel Miller’s family (below) enjoy an evening at the GPS World bowling alley.A visitor to NovAtel’s booth tries his piloting hand in a 3-D attitude solution with NovAtel’s GPS/INS SPAN-CPT product. Used as a controller in the flight simulator, it mimics an actual SPAN application as profiled in the September GPS World.
Miniature autonomous vehicles navigating the mean streets of a LEGO town take center stage on the show floor to highlight the Institute of Navigation’s first Mini-Urban Challenge and upcoming second challenge, now seeking sponsors.Northrop Grumman personnel Jill Rigler, Ed Chou, George Vannick, and Velvet Hoover explain the company’s programs to booth visitors on the show floor. Northrop Grumman was a Gold Sponsor of GPS World’s Leadership Dinner.Larry Skorski of the U.S. Coast Guard took first place in GPS World’s Wii Bowling Challenge (score, 225). Editor Alan Cameron presents him with a copy of Brad Parkinson and James Spilker’s book, The Global Positioning System, signed by the first author.