At the turn of the century, the premise was that GPS was revolutionary, would work everywhere we needed it, and everything else was old hat. Turns out that we need something that works indoors and in critical outdoor applications without a clear view of the sky, like downtown cores, dense forests, and in-and-out of coverage places like mountain valleys. A Canadian team out of Calgary obtained a couple of key patents and founded a business around navigating with sensors when GPS/GNSS was obscured or just plain not available. Just coincidentally, around the same time, cell-phone and tablet manufacturers were adding these same sensors to their devices so users could readily re-orient screens and play motion video games.
I spend winters in Florida, and in the summer I’m in Calgary, Alberta — of late, “summer” can be a somewhat misunderstood term when talking about weather in that part of Canada; many may recall the devastating floods in that region this year, but nevertheless it’s my home for several months of the year. This year while I was there, I visited Calgary-based Trusted Positioning, Inc., in its offices across from the University of Calgary (UofC), and again at the ION convention in Nashville. I recently had the opportunity to catch up with the staff again and to get a progress update on their unique business and positioning technology.
To bring us all up to scratch on who or what is Trusted Positioning, Inc., (TPI) and where they came from, here’s a brief refresher.
TPI has been around since 2009 as a spin-off of geomatics engineering research by its four founders at UofC. Naser El-Sheimy was the prof, and Chris Goodall (now TPI’s CEO) and Zainab Syed were his grad students when MEMS started to become of interest to the group — their focus had previously been largely on tactical grade IMUs and integration with GPS. They put together a report in 2000 on the opportunity that MEMS offered for navigation, and this started them thinking of potential commercial prospects.
So the following year, two proposals were submitted and ultimately accepted by Canadian government support agencies. This eventually provided start-up funding for what was to become TPI. Chris and Zainab earned their Ph.D.s in 2008, and Jacques Gregory joined them from Queens University in 2009. The first two or three years were tough, and El-Sheimy advises if you are not prepared to give up your existing lifestyle throughout the launch period — family, fun, vacations, finances, even sleep — don’t take on starting such a business. In this case, things ultimately worked out for the founders, and TPI is now launched and doing well.
In those days, the premise was that GPS was still revolutionary, would work everywhere we needed it, and everything else was old hat. Turns out as time passed we wanted something that worked indoors and also in a number of critical outdoor applications where there wasn’t exactly a clear view of the sky — like downtown cores, in dense forests, or in-and-out of coverage places like mountain valleys.
The pre-TPI research at UofC led to a couple of key patents that went with the team into the new business, and as the business grew, new in-house patents began to be developed — all around navigating with sensors when GPS/GNSS was obscured or just plain not around. Coincidentally, cell-phone and tablet manufacturers were then adding MEMS inertial components so users could readily reorient screens and play motion video games, so TPI began to use these sensors for inertial aiding or even inertial navigation for handheld personal navigation.
Nowadays, TPI has around 20 employees, has developed more than 20 distinct patents with more in the works, and has been licensing software since 2011. The initial Canadian government (NSERC and NRC) support funding has been replaced by equity investment of more than $2 million and key strategic partners who have signed on as investors. Plus, a strong technology/business-oriented board has been put together. Well-known industry players John Ladd (ex-CEO of NovAtel) and Werner Gartner (ex-CFO of NovAtel) have joined TPI’s board, and several past NovAtel executive team members have also invested a significant portion of the equity raised to date. It has to be a good sign when industry leaders like those invest and believe in the direction TPI is taking.
Don Dodge.
The latest advisor to lend support is Google’s “Developer Advocate” Don Dodge — a guy who specializes in picking out key technology companies at the right time, invests in them personally, and then helps guide them to greatness.
Before becoming a “Developer Advocate” at Google, Dodge was the director of Business Development for Microsoft’s Emerging Business Team. He was also part of the leadership for technology start-ups Forte Software, AltaVista, Napster, Bowstreet, and Groove Networks. “Indoor location and positioning technology is the next big thing,” says Don Dodge, “and sensors are the foundation of this technology. I’m excited to work with Trusted Positioning, the market leader in using sensors for indoor location.”
TPI doesn’t only use MEMS inertial sensors (accelerometers and gyroscopes) in phones; it also uses magnetometers, barometers, and available Wi-Fi networks and their associated location databases, GNSS, vehicle speed sensors, user updates, and camera inputs.
As its brochure says, “Sensor solution is always on when moving and provides a consistent accuracy output to seamlessly integrate with all available updates.”
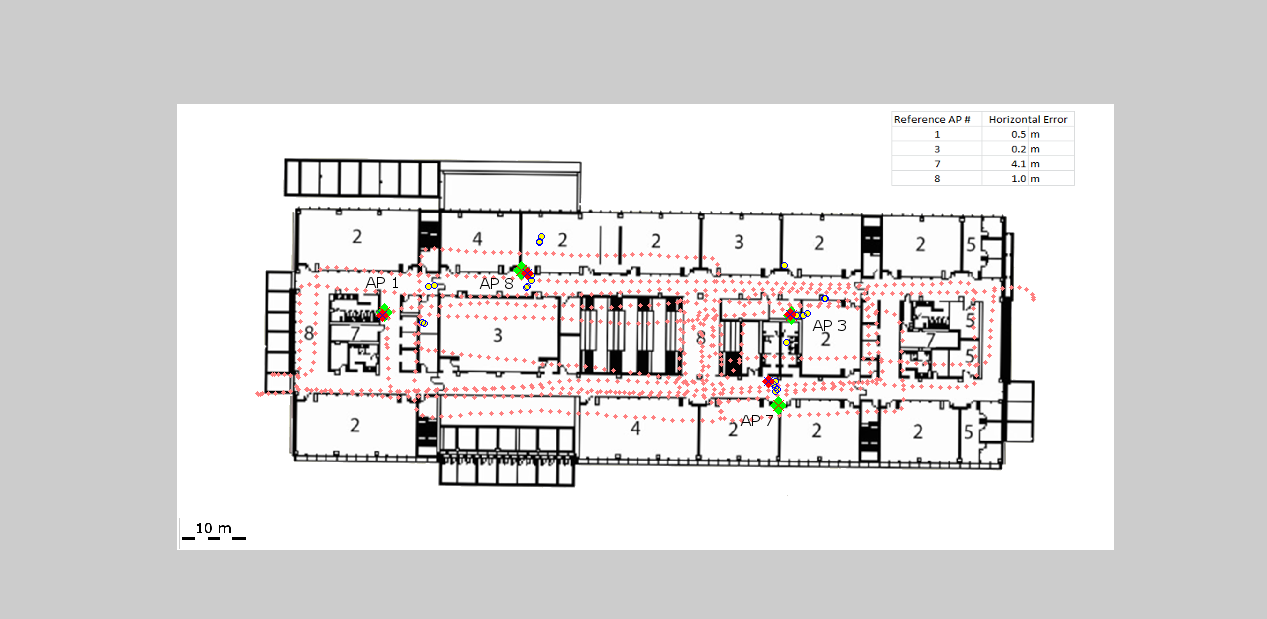
The problem with Wi-Fi is that the databases don’t stay totally reliable — so TPI solves this problem by also collecting data using other integrated sensors for positioning, which can then be used to update the very same Wi-Fi location data. This is one of the market areas that TPI believes it can access, since Wi-Fi positioning is becoming a more common navigation source. TPI would say Wi-Fi should be considered as only part of the solution, as it needs help from other sensors to work well.
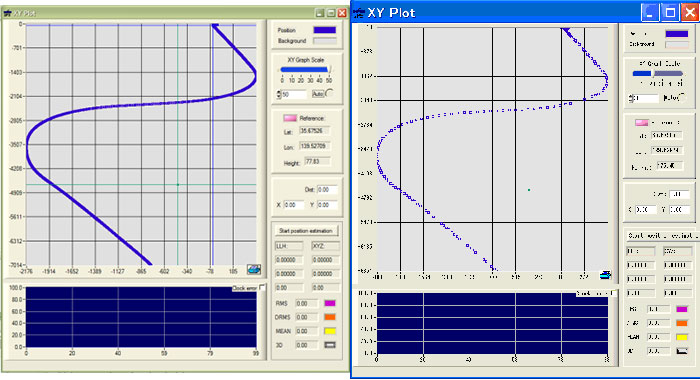
Estimated Wi-Fi access point locations using sensors.
The Trusted Portable Navigator (T-PN) navigates while people walk or drive and use their cell phones in any orientation, anywhere and everywhere — including malls, airports or subways. T-PN combines the use of existing smartphone motion sensors with wireless updates (such as Wi-Fi and GNSS) for a complete solution with no extra hardware or infrastructure.
Over the last three years, TPI has developed an entire library of typical profiles for how people move and carry their cell phones. Algorithms detect particular movement profiles and then use appropriate filter adjustments to maintain or improve accuracy when in locations such as urban centers.
T-PN software has been released by TPI this year for integration in any mobile phone, tablet, or PC operating systems, with a view to capturing expanding mobile market applications, such as mobile advertising, indoor E-911, augmented reality, and fitness/recreation. Pedestrian navigation, navigation in parking garages, monitoring the location of devices in store displays, and assisting store visitors to find what they are looking for — all these potential applications are opportunities for TPI solutions. Therefore, TPI has so far chosen to market to mobile OEMs, MEMS and semiconductor manufacturers who can embed TPI software solutions in phones or in MEMS devices or components that go into these phones.
New technology areas that TPI is working on include wearables and using cameras as navigation sensors.
Now that a number of devices such as phones, watches, tablets, and (Google-like) glasses come with Bluetooth tethering, their movement can all be integrated to improve the navigation solution for people on the move.
TPI estimates that its sensor drift is approximately 4-8 percent of distance traveled when operating without any wireless updates. Chris Goodall calculates that adding multiple devices could improve overall accuracy of the navigation solution by up to threefold.
And how the heck do you use a camera as a navigation sensor without a massive visual database? Simple — just focus on a stationary object and calculate the turn rate of the camera/user. Not so easy, really, as continuously detecting stationary objects as the user moves sounds quite complex. How do you differentiate between objects moving and the camera/user moving? “Feature flow” over multiple images is apparently the answer in deriving velocity and turning rate. We’ll have to see when and how TPI will solve this problem and field a solution — but I suspect it may be very soon as TPI is apparently providing sneak-peak, hands-on demos at a number of upcoming trade shows this year.
Lots of companies are working on solutions to the indoor navigation problem, but as Goodall indicated, after first discussing things with TPI and then going off to try to do it themselves, people tend to come back to TPI. Its not as easy as it sounds, and it takes time and lots of trial and error to get anything that works, then making something that works reliably under all conditions is even harder. So TPI is now at the stage, with solutions that work well and work very reliably, that the company is are launching on consumer mobile phones and anticipate larger, mainstream deployments in 2014-2015. Look out for phones with TPI software in 2014 — and there is a rumor that the company may also make its software available to applications developers.
We’ll keep in touch with TPI and let you know from time to time as the company makes further inroads into this new market segment.
As GPS vulnerabilities to intentional jamming and unintentional interference become key factors for high-reliability navigation, inertial aiding to coast through outages becomes an important consideration for OEM integrators. Micro-electro-mechnical systems (MEMS) have been seen as offering the most promising, economical way forward for cost-effective, compact inertial and gyro solutions for almost every application going.
However, in the past, MEMS gyro and accelerometer components from which inertial and gyro systems are built have not provided performance anywhere near as good as laser gyros (ring laser gyros, or RLG) used in the majority of high-performance inertial systems. Now, as new MEMS inertial systems have begun to hit the market in recent months, the envelope appears to be opening up on achieving pretty high performance.
Gladiator Technologies, based in Snoqualmie near Seattle, Washington, is one of several companies currently supplying MEMS-based inertial/gyro systems for a wide range of applications. I came across Gladiator at the Association for Unmanned Vehicle Systems International (AUVSI) convention in Washington, D.C., last August and decided to take a closer look at them as a typical supplier of new, compact, cost-effective MEMS navigation devices, which are becoming essential compliments to GNSS.
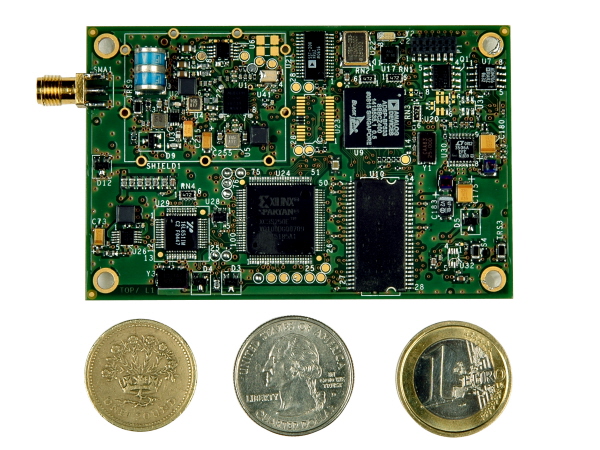
Gladiator has been around since 2005 and has continued to innovate each year, growing its product line and gradually improving performance. Right or wrong, as an “inertial layman” I’ve always used drift rates (bias) to assess inertial accuracy, and this is apparently directly related to the noise floor of the sensor device. Now Gladiator has released its latest Landmark 50 INS/GPS with low noise MEMS gyros and accelerometers and it claims 1 degree/hour drift rate in-run — as good as an 8-cm path length ring-laser gyro — something of an achievement for a MEMS-based device. (That’s a 2 Euro coin used in the photo for size reference.)
Landmark 50 INS/GPS, shown with a 2 Euro coin.
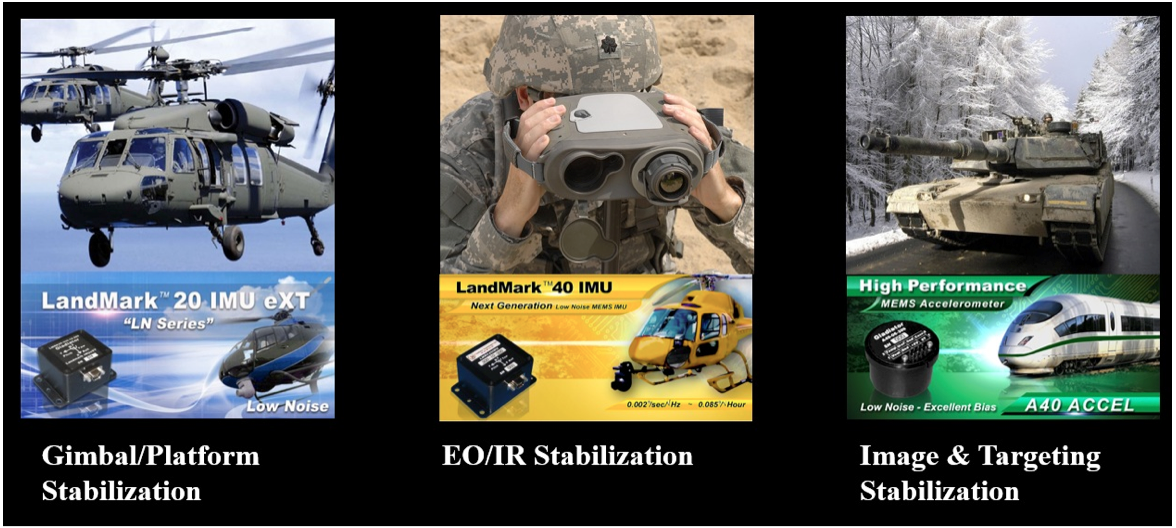
The product line goes all the way from automotive gyros up to the latest high-performance GPS/INS, and includes basic angular rate sensors and accelerometer packages. Applications include automotive testing, agricultural motion sensing, motorsport racing, instrumentation (including robotics and flight testing), rail, marine and energy motion detection, military land-vehicle and marine platform stabilization and navigation, electro-optical/infra-red targeting and stabilization, launcher and missile stabilization/navigation, and unmanned vehicles.
Gladiator integrates u-blox GPS receivers in its GPS/INS systems because of good environmental and test performance and good accuracy and navigation update rates. It’s possible in the future that airborne-qualified GPS or higher performance DGPS will find their way into new inertial variants, but for now Gladiator is very satisfied with u-blox receivers.
Applications may use a single/dual axis gyro or inertial measurement unit (IMU) where angular attitude outputs are required, such as image, attitude or weapons stabilization, or even packaged accelerometers.
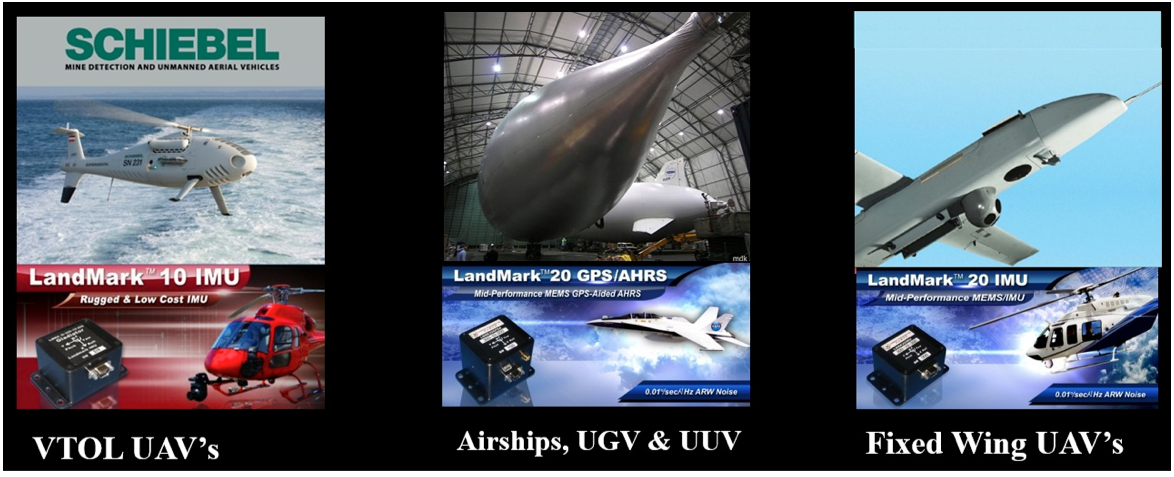
And, of course, unmanned aerial vehicles (UAVs) are one of the target markets for these MEMS products — Gladiator has already had a lot of success in this segment. Its equipment is used on a number of unmanned vehicles, including fixed-wing and vertical take-off and landing (VTOL) vehicles, as well as ground and underwater unmanned vehicles. These applications range from primary navigation/backup navigation to primary flight control/backup flight control, and include a large number of stabilization applications including electro-optical/infrared, LIDAR (light detection and ranging) and platform stabilization. Gladiator supplies these UAV applications with various inertial sensors (gyros) and inertial systems, including IMUs, vertical gyros (VGs), attitude heading reference systems (AHRS) and GPS-aided inertial systems. Customers in this market segment include Schiebel, U.S. Army, U.S. Naval Research Laboratory, ST Aerospace, and others.
Gladiator is closely monitoring progress towards UAVs gaining certified access to civil aerospace, and the prospect of expanding civilian applications and markets that that will bring. The company feels that its skills are in and around inertial sensor technology and products, and its efforts towards civil qualification should focus on these elements. Therefore, Gladiator is are looking for a partner who would take on GNSS civil qualification for civil airborne GNSS/INS applications.
Gladiator is still a small outfit with around 30 people, with most of its engineering done in-house by a team of nine engineering staff supported by some external consultants. Senior management has more than 100 years’ experience in this field, and Rand Hulsing, the chief scientist, holds 68 patents in MEMS inertial sensors. New patents are currently pending on inertial-grade gyro and accelerometer designs. People on staff have gained significant experience working for companies such as Allied Signal, Sundstrand, Honeywell, L3, Systron Donner and Hughes.
I pressed Mark Chamberlain, Gladiator CEO, for details of which (bought out) OEM MEMS devices his company integrates into its systems, and I was quite surprised by his response — Gladiator designs its own high-performance MEMS gyros and accelerometers and uses a fabless model to produce them. Clearly, it is having great success with this approach as its product performance has improved to almost within reach of existing technology high-performance inertial systems. Some of Gladiator’s lower end systems do still use OEM MEMS sensors. Their manufacturing facility in Washington focuses on product assembly and test, including calibration and environmental test.
The systems Gladiator supplies are non-ITAR — which is short for saying that they can be exported to most friendly countries, and are not subject to special/restricted U.S. State-Department trade regulations.
Gladiator does around $10 million/year currently, and anticipate its growth to continue. It has a number of sales representatives in North America, South America, Europe, Asia and Australia, so it is well known around the world, with more than 200 customers in 30 countries. I asked Mark about the possibility of an Initial Public Offering (IPO), but he is currently quite happy with the existing private ownership for the time being. The Gladiator board includes investor-directors from France and Germany, and the external directors also have impressive experience, so presumably board guidance has also helped Gladiator get where it is today.
So, we have almost-inertial high-performance products with integrated GPS, attitude-only products and accelerometer packages for almost any application you could imagine, and are quietly inching towards 1 deg/hour total within the next few years — MEMS devices really have come a long way in the last few years.
In recent years, we’ve seen explosive growth in the Unmanned Air Vehicle (UAV) market segment, with most on-board navigation systems relying on GNSS or GNSS with inertial aiding. As military budgets decline, interest in civilian commercial applications is growing rapidly. The U.S. Federal Aviation Administration (FAA) recently awarded special type certification to two UAVs for commercial Arctic operations and released a Roadmap for UAV certification. The industry is now poised for the opening of the regulation floodgates to address a growing commercial demand.
On November 21, I hosted a GPS World webcast where industry leaders in GNSS-based navigation for UAVs, for both military and civilian sectors, presented what they are doing in UAV navigation and how they see this exciting market unfolding. A record number attended; for those who were unable to attend, here’s an overview of the GPS WorldUnmanned Aircraft Navigation webinar, with answers to questions posed at the end of the article. You can still view the entire presentation through GPS World’s Webinar page.
The presenters:
Olivier Casabianca, Business Area Manager of the Trimble GNSS OEM portfolio, which includes both the Trimble and Ashtech receiver module product lines.
Eric Brewer, Senior Systems engineer for Rockwell Collins. He develops and tests guidance, navigation, and control algorithms for unmanned and optionally piloted aircraft.
Neil Gerein ofNovAtel, responsible for the navigation warfare product lines, including the GPS anti-jam antenna and SAASM receiver used on unmanned vehicle systems.
Hal Adams, Accord Technology, Chief Operating Officer, and founder of AvValues LLC, which is partnered with Accord Software & Systems, Bangalore, India.
Howard Loewen, president of MicroPilot, which supplies single-board, fully integrated UAV autopilots, ultra lightweight autopilots, and triple redundant UAV autopilots.
Trimble has a wide product line with many applications in UAVs. Its receivers are multi-constellation and multi-frequency with low power and small form-factor. High-precision modules can also use Omnistar precise point positioning (PPP) aiding, have multiple external interfaces, and can provide precise heading and attitude.
Some of the UAV solutions presented include moving baseline (relative) RTK between UAVs, and “swarms” of UAVs, autonomous landing and autonomous refueling between UAVs.
Autonomous landing.
Autonomous refueling.
Precise positioning and attitude.
Other applications include precise positioning and full GNSS attitude, and of course the Applanix line of inertial aiding sensors is a key element for aiding and GNSS-denied environments.
With the recent release of the FAA Roadmap for UAV certification and integration into the National Airspace System (NAS), our experts were asked to give us their views on what this means for the industry. Olivier Casabiance highlighted the FAA Modernization and Reform Act, which calls on the FAA to integrate UAS (Unmanned Aircraft Systems) into the NAS by September 2015, and extensive U.S. and European committee activity to develop standards — all leading to a requirement that GPS/GNSS navigation systems for UAVs may need to be FAA TSO (Technical Standard Order) qualified, just as they are now for manned aircraft.
This coming requirement will make extensive use of ADS-B (Automatic Dependence Surveillance Broadcast) and certified receivers, such as the Trimble/Ashtech SkyNav GG12W receiver, which is FAA qualified/certifiable, with firmware developed to RTCA DO-178B level B standards, hardware to DO-208, and meeting DO-217 special category 1 landing requirements.
SkyNav GG12W receiver.
Unmanned aircraft application.
Eric Brewer then presented Rockwell Collins’ Controlled Technologies products and outlook on unmanned aircraft. Rockwell acquired Athena Technologies some time ago, which specializes in autopilots for unmanned aircraft. Athena is the Center of Excellence for Rockwell Collins in guidance, navigation, control, and estimation technologies. Athena solutions combine GPS-coupled inertial navigation system (INS), air-data sensing, and flight-control computing. Various levels of inertial sensor performance are available with a number of analog/digital interfaces and appropriate levels of hardware environmental qualification. With single string and triplex solutions, this product family has amassed more than one million flight hours in operation. Athena also supplies a range of mission computers which are used with these autopilots.
Athena autopilots.Athena mission computers.
One of the principle UAS applications for this system is on the Navy’s Small Tactical UAS (Boeing/Insitu Scan Eagle) system, where Rockwell provides the GPS SAASM-RTK (Precision RelNav) System.
STUAS capture.Airborne anti-jam.
Each system consists of both base-station and airborne modules integrating the Rockwell 24-channel all-in-view tracking and navigation L1/L2 SAASM P-code GPS receiver (MPE-S Type II), with an external processor running custom RTK software. It provides better than 20-cm (1 sigma) 3-D relative position accuracy for a baseline of up to 30 km. Rockwell also has a number of GPS “hardening” anti-jam solutions for both airborne and missile applications.
Looking ahead, Rockwell sees reduced growth in the UAS domestic military markets and a potential split in UAS development roadmaps. Larger higher reliability, higher complexity systems may move toward NAS integration and FAA compliance, while significantly smaller and cheaper systems may end up restricted to applications outside the NAS.
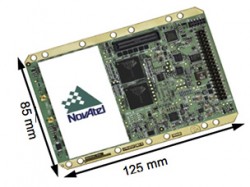
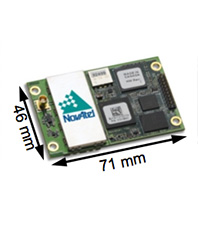
Neil Gerein provided an overview of NovAtel’s receivers and capabilities, and highlighted some of NovAtel’s UAV applications. NovAtel’s OEM6 series of receivers comes in a number of different configurations with comprehensive support for all current and upcoming GPS, GLONASS, Galileo and BeiDou satellite signals.
OEM 628 – three-frequency GNSS.
OEM 638 – three-frequency GNSS, 240 channels.
OEM 615 – dual-frequency GNSS.
These receivers find (or could find) applications in UAV precision landing, payload sensor positioning, and civil anti-spoofing. And the OEM625S SAASM receiver combines civil L1/L2 GPS (including GLONASS and Galileo) with the L-3 IEC XFACTOR SAASM capability for military UAV precision navigation and landing.
Align heading generates high-precision heading and pitch angles between two receivers for real-time navigation for rotary-wing aircraft, enabling precise capture into nets and for other retrieval/capture systems. Align relative positioning generates a high-precision 3-D vector between two or more mobile receivers for high-precision monitoring and automation.
NovAtel also has the SPAN line of GPS/Inertial solutions, which may be used on UAVs for intelligence, surveillance, target acquisition, reconnaissance, airborne mapping, and shipboard landings. The GAJT-AE compact null forming electronics for UAS and other small platforms provides protection of GPS L1 and L2 from interfering sources and works with a variety of four-element antenna arrays enabling flexible installation options.
GAJT-AE anti-jam system.
Gerein thinks that UAV growth has been largely due to affordability and ease of use, and allowing UAVs to have regular access to the NAS will create even more growth. The existing FAA timelines are aggressive, considering the number of interested parties, so equipment suppliers should work closely with FAA to ensure that the level of certification is appropriate for the safety of the public, while remaining affordable and practical so that the industry is not stifled.
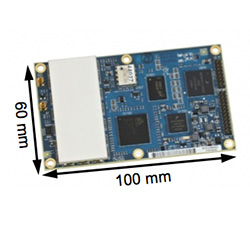
Next, Hal Adams from Accord Technology gave his views on navigation for UAVs. Accord Technology has its base in Phoenix, with facilities in Anchorage, Alaska, while the principle R&D base is in Bangalore, India. The Accord NexNav receiver is airborne-qualified and is sold as an end-item enclosure and as a receiver board, and the NexNav-mini variant is sold as a receiver card for OEM integration.
NexNav receiver enclosure.
NexNav OEM receiver.
NexNav mini OEM receiver.
These receivers are qualified to RTCA DO-178B software and DO-254 hardware and meet FAA TSOA (C145c) requirements. So they are already at the required standard for manned (GA) aircraft use — integrators wishing to move towards FAA compliance may be able to reduce the work to meet vehicle certification requirements by incorporating receivers such as these in their UAVs.
Adams reviewed the FAA’s plans to implement ADS-B throughout the U.S., and indicated that all aircraft operating in the NAS will be required to equip and use ADS-B by 2020. The FAA is rolling out the ADS-B ground infrastructure, and air-traffic operations are already underway using ADS-B in Alaska. ADS-B requires an approved GPS source meeting FAA AC 20-165A providing it with the necessary data — and the NexNav products apparently already meet this requirement.
As far as where the FAA is going on UAVs and how regulations will affect them, Adams related statements from the FAA that UAVs, “Must be as safe as manned aircraft, including systems.”
He felt, therefore, that UAS will have to comply or operate separately, outside of the air-traffic system. UAVs wishing to operate in the NAS will likely have to be certified and approved by the FAA to NextGen standards. NextGen is the next-generation Air Traffic Control system under development by FAA.
Finally, Howard Loewen,president of MicroPilot, provided insight into MicroPilot’s UAS products, the company’s use of GNSS, and how it sees things evolving. MicroPilot has been around since 1995, so it has already watched the UAS market evolve. MicroPilot develops and fields autopilots for manned and unmanned aircraft using GPS in a number of different configurations, including consumer-level GPS, carrier-phase RTK, and moving baseline RTK.
Consumer GPS.
RTK.
Moving baseline RTK.
UAVs have a number of challenges to overcome — RF frequency allocations for control links, privacy concerns, meeting security and regulatory requirements, incorporating airborne standards into their development, developing “see-and-be-seen” (sense and avoid) technology, and competing with existing manned aircraft capability for their business. Loewen made some interesting comparisons between the use of UAVs and that of (manned) Cessna operations. While a Cessna payload can be significant, there are few flight restrictions and the technology is mature. UAVs are relatively immature and have both payload and flight restrictions. The market will have to decide if the potential for lower UAVs operating costs will be enough to win out.
Nevertheless, Micropilot is already preparing for the requirements of FAA certification for UAS autopilots and has developed hardware and software verification/validation tools.
Loewen sees pluses and minuses for UAVs in the future – FAA selection of UAS test sites will continue to be delayed, standards will begin to emerge from European efforts to integrate UAS into their airspace (maybe sooner than in the U.S,?), small UAS (sUAS) will continue to be popular in areas of the world where regulations have yet to be put in place, and there is even the possibility that the FAA may back off trying to control sUAS (because of the commercial volume?), that large UAS such as the Predator will provide no advantage over Cessna-type manned aircraft, and that the FAA will continue to delay regulations as it concerns itself over details that may not seem to be totally relevant — like the “cockpit door” issue highlighted in the recent FAA Roadmap.
There was a great deal of interest from a large audience for the webcast, and we received a number of questions before and during the webcast. Our experts did their best to provide answers wherever possible, and this Q&A is presented at the end of this article.
Overall, we seem to have covered a lot of ground in the webcast on UAV navigation – providing an insight into both existing capabilities and how some key industry leaders see the future unfolding. Almost every day there are new and interesting developments – I’m sure by now we’ve all seen the video clips from 60 Minutes and how Amazon demonstrated delivery within 30 minutes using small UAVs to pick up packages at their distribution plant and deposit them on the buyer’s doorstep, and of course the potential delivery of hot pizza right to your door.
Let’s see if some of this stuff sticks and we can actually make this sort of progress safely, usefully and efficiently.
Tony Murfin
GNSS Aerospace
Webinar Q&A
Here are some brief responses for questions received. Questions were submitted during the webinar by the audience, and answered post-webinar, in writing, by the panelists and moderator. The views expressed are those of the authors and are not necessarily supported by GPS World.
Q:What are the safety consequences for self-navigating, self-separating unmanned aircraft?
A: No rules yet published, but expected that UAS will be required to meet the same flight regulations as manned aircraft.
Q: We have light rail and buses. Is any company, agency one planning on using this technology to monitor these type of vehicles movements for security, prediction arrival, etc.?
A: This is a typical application for UAS — not aware of any current operations like this
Q: Could we use UAVs to survey bird species that go every year to the same spot to breed? I am thinking specifically on Greater Sage-Grouse.
A: This is a typical application for UAS – several wild life monitoring operations already exist
Q: I was told by a UAV manufacturer that they are not illegal if you fly below 400′. Is that true?
A: No UAS rules yet, but someone was just indicted by FAA for ‘buzzing’ building at low altitude in New York.
Q: What are the rules for the use in the private industry?
A: Rules being developed by FAA for civil operations — U.S. Congress has set deadline for integration of UAS into civil airspace by September 2015. FAA just published a “Roadmap” for how they see this process going forward.
Q: Why should general aviation pilots not be concerned about UAV collisions?
A: Rules are needed for the operation of UAS in civil airspace & these are expected to be equivalent to those for General Aviation aircraft.
Q: Is machine learning the most significant part of the UAN?
A: Do you mean UAS? Not really – most systems are pre-programmed and well defined. For use in civil airspace all systems on an aircraft need to be fixed and pre-qualified and approved – no room for changes in or-board systems.
Q: What are the flight rules in Alaska near airports or military controlled airspace for UAVs?
A: GPS and other GNSS basic unaided accuracy is several meters, with PPP or L-Band satellite corrections we get close to 1 meter and with Real Time Kinematic we can get a few centimeters. Risk (?) is always a good question, but that’s what the FAA and other certification/regulation agencies are there to ensure that risk is minimized. People have been using GPS/GNSS for over 20 years, and there are very few incidents of systems failures, rather temporary loss of signal, or degraded accuracy. This is why manned aircraft which use GPS have back-up systems and UAS will need similar redundant systems.
Q: What is the application of mUAS for agriculture and surveying?
A: Lot of activity in high precision surveying using UAS is already underway. Crop spraying using helicopter UAS has been in use in Japan for many years – its expected use will grow exponentially in these areas when there is open access to airspace.
Q: What FAA regulations prevent organizations from flying at low elevations, if any?
A: No rules yet published, but expected that UAS will be required to meet the same flight regulations as manned aircraft. There is a chart in Accord’s briefing showing the layout of NAS with the ADS-B requirements.
Q: How do payload applications access GNSS data, Position, Navigation, Timing, and utilize the precise 1PPS for synchronization if the Navigation function is NOT to be compromised?
A: Payload applications and the navigation function typically use separate GNSS receivers to ensure the navigation function is not compromised. Actually, for manned aircraft ADS-B, per FAA the ADS-B GPS source must meet AC 20-165A and can be independent of nav functions, including GPS based navigators. FAA will know “exactly where the platform is “lost” and to a high degree of confidence.”
Q: GPS spoofing has been demonstrated by the University of Texas as an effective means to redirect a drone aircraft. What is the industry doing to protect against command/control & navigation hijacking?
A: UAVs operated by the US Government and Allied Forces can use SAASM receivers to protect against spoofing. For civil user, multi-GNSS receivers with positioning backups such as inertial technology are also effective against spoofing attacks.
As mentioned above, a SAASM is the best way to prevent spoofing. Jamming is also of particular concern, and Antijam GPS technology is a good way to mitigate the effects of jamming.
Q: What is the best technology to pursue as a backup to GPS? (e.g. D-LORAN, Magnetic Field Nav., Cell Tower Triangulation, etc.)
A: GNSS+Inertial is a way to backup GNSS only in GNSS denied environments. Could be use to augment the information (heading / attitude on top of position) or for continuous positioning…
Procedures are the primary back-up for manned aircraft. If I loose transponder or comms, etc., there is a procedure for operations in those events. If I loose comms the FAA increases separation, clears airspace, etc., to help insure no conflicts. UAS will likely have to have some mitigation like manned procedures. Of course, with a person on the flight deck, it is a somewhat different. I think there will have to be new considerations, like lose of link to the UAS and alternative on the platform and with the NAS manager (ATC). If a pilot looses consciousness on the flight deck, it is kind of like a UAS loosing the command link. So, what happens with person on flight deck if that person cannot operate the aircraft? Seems problematic to resolve or mitigate.
This is a hot topic of research. Some current solutions include using Magnetometers and Deduced Reckoning (i.e. using a wind estimate and airspeed measurements). There is also research into using image-based navigation (there are some details about this in Rockwell slides).
Q: Could be GNSS a stand-alone sensor for navigation, and what is the GNSS coverage above 80 N/S parallel?
Actually, during GBAS International Working Group session in Seattle this summer there were a couple of presentation regarding ionospheric effects on GNSS which seem to support the following statement:
Challenges for GNSS in the Arctic
For GNSS, presently GPS and GLONASS but in the future also for Galileo, the performance in the Arctic region is reduced compared to the performance obtained by users at mid-latitudes. The reasons are mainly the satellite-receiver geometry and the ionospheric effects on the satellite signals, but also users do not have the benefits of satellite based augmentation systems (SBAS) at a larger scale.
Q: el % de errores y eficases de estos, y si en poco tiempo podrian activarse y desaptivarse automaticamente segun sea el caso
A: We didn’t have any Spanish speakers, but this is our best-guess answer. Most GNSS receivers have some form of Receiver Autonomous Integrity Monitoring (RAIM) and airborne systems need to conform to Minimum Operational Performance Standards (MOPS), which define error rates for all known situations.
Q: Which industries will see the greatest increase in usage of unmanned systems once the FAA opens up regulations for integrating unmanned aerial vehicles into society?
A: Its likely that the most intense civilian applications of UAS have yet to be invented. But we do know that crop & pipeline monitoring, precision and non-precision surveying, flying-camera applications for all forms of news and security, potential package delivery, and even vehicle traffic monitoring are popular applications waiting for more open access to airspace.
Q: Per the FAA’s recently released Civil UAS Roadmap, what exactly constitutes a “small UAS (sUAS) with very limited operational range?”
A: It seems that the FAA has yet to publish regulations which would define sUAS. These apparently have been drafted and are still under consideration by FAA.
Q: Per the FAA’s recently released Civil UAS Roadmap, what exactly constitutes a “small UAS (sUAS) with very limited operational range?”
A: The FAA has yet to publish regulations which would define sUAS. These apparently have been drafted for some time and are still under consideration by FAA.
Q: What is the risk of the aircraft crashing due to a last minute wind gust as it approaches the wire (referring to the Rockwell Collins product used to land the UAV on the wire on the ship)?
A: The safety is evaluated through both simulation and flight testing. The wind gust disturbance rejection is a primary constraint, and the operational envelope (wind envelope, ship motion, wind over deck, capture speed) is selected to ensure that risks are maintained at acceptably low levels.
Q: Question for all: Can any of these products produce primitive data (pseudorange, carrier phase) prior to demodulation of an ephemeris. (We are looking for the fastest possible acquisition time.)
A: Yes, we (Rockwell Collins) have products available which can output uncorrected pseudorange and carrier phase before receipt of ephemeris data. Feel free to email me for more details.
Q: Have any of these products been used in missile range-safety applications? (Missile = BIG UAS)
On November 7, the FAA released a new roadmap for the “Integration of Civil Unmanned Aircraft Systems (UAS) in the National Airspace System (NAS)” — which it is hoped will provide improved guidance for those extremely interested operators, manufacturers, systems suppliers and those with pending civilian applications of unmanned aircraft.
The forward to the Roadmap by FAA Administrator Michael Huerta says,
‘This roadmap outlines the actions and considerations needed to enable UAS integration into the NAS. The roadmap also aligns proposed FAA actions with Congressional mandates from the FAA Modernization and Reform Act of 2012. This plan also provides goals, metrics, and target dates for the FAA and its government and industry partners to use in planning key activities for UAS integration.”
The FAA, acting through the Unmanned Aircraft Systems Integration Office, aims to enable the integration of UAS safely and efficiently into the NAS. To do so, the FAA is working with stakeholders — manufacturers, vendors, industry trade associations, technical standards organizations, academic institutions, research and development centers, governmental agencies, and other regulators.
The premise is that UAS will be allowed to operate in the NAS, but in so doing cannot reduce existing capacity or decrease safety, cannot negatively impact current operators/operations, and cannot increase the risk to airspace users or people or property on the ground — any more than the integration of other new or novel technology. While progress has so far been significant, many challenges and opportunities apparently lie ahead.
Up to the recent Restricted Type Certification of a couple of unmanned aircraft systems by FAA — namely the Boeing/Insitu Scan Eagle and the AeroVironment’s Puma AE — operators have been and still are required to apply to the FAA for individual Certificates of Authorization (CoA) for each and every U.S. application of UAS. The FAA Roadmap is intended to provide an initial estimate of timing and to list tasks and considerations that will ultimately enable UAS integration into the NAS for the planning purposes of the UAS community.
Boeing/Insitu Scan Eagle loaded for launch.
Commercial operations that the FAA envisages include:
security awareness;
disaster response, including search and support to rescuers;
communications and broadcast, including news/sporting event coverage;
cargo transport;
spectral and thermal analysis;
critical infrastructure monitoring, including power facilities, ports, and pipelines;
commercial photography, aerial mapping and charting, and advertising.
Other commercial and public applications that the FAA might also want to add to the increasing demand for airspace access include:
crop monitoring;
precision surveying and GIS;
wildlife monitoring;
(ground) traffic monitoring and control;
firefighting support;
police services;
many, many more applications which will emerge rapidly once regulations permit ready access to airspace.
Of course, the FAA controls an ever increasingly complex airspace to which certified manned aircraft already have regulated access – it’s only fitting that existing safety and commercial use be primarily maintained and in no way compromised. Successful demonstration of UAS to achieve demanding communications, navigation, and surveillance performance will be essential.
U.S. National Airspace System.
The Roadmap quotes the International Civil Aviation Organization (ICAO) Circular 328, “Unmanned Aircraft Systems (UAS) Circular”:
“A number of Civil Aviation Authorities (CAA) have adopted the policy that UAS must meet the equivalent levels of safety as manned aircraft… In general, UAS should be operated in accordance with the rule governing the flight of manned aircraft and meet equipment requirements applicable to the class of airspace within which they intend to operate…To safely integrate UAS in non-segregated airspace, the UAS must act and respond as manned aircraft do. Air Traffic, Airspace and Airport standards should not be significantly changed. The UAS must be able to comply with existing provisions to the greatest extent possible.”
Another significant FAA statement:
“Except for some special cases, such as small UAS (sUAS) with very limited operational range, all UAS will require design and airworthiness certification to fly civil operations in the NAS.”
So, having set the tone that UAS will have to grow up in a major way to become equivalent to existing manned aircraft and to comply with virtually the same rules, the Roadmap goes on to provide much more detail of what will be required.
The FAA is working on UAS regulations — this is not really a big surprise. It would seem that there is significant effort underway to get rules in place, detailed rules which not everyone in the UAS industry will welcome. One scenario is that the huge range of UAS suppliers that we see regularly at the AUVSI annual convention/exhibit could be slimmed down if the market indeed transitions to commercial operations from the current level of military applications, and only the big companies who can afford to comply will remain. Reduced competition usually means increased costs for users, so this may not sit well with the market.
Then there are more difficulties in adapting existing airborne regulations for commercial aircraft to UAS and UAS applications. An example is given of regulations for commercial transport cockpit doors — what’s a “cockpit” when you think of UAS, and where’s the “door” for a ground-based control system in a mobile trailer, or a handheld iPad flying a small quad-rotor air vehicle? (Maybe a different thought process is required here.)
Then the air-traffic control system has to absorb flight of unmanned aircraft in an already overcrowded route network system. Of course, only some UAS operations will be intertwined with regular commercial transport air traffic, but there are huge numbers of “less-disciplined” General Aviation fixed-wing and rotor aircraft with which UAS are bound to interact. So ATC has to understand, control and regulate that interaction. Surely these are common-sense statements which most people would support?
Major technology challenges are anticipated due to the absence of an on-board pilot.
“Removing the pilot from the aircraft creates a series of performance considerations between manned and unmanned aircraft that need to be fully researched and understood to determine acceptability and potential impact on safe operations in the NAS.”
There’s that dreaded word — “researched.” For anyone in the business of selling UAS or UAS systems, including GNSS-based guidance systems, the need for potentially prolonged research may spell death for a nascent business, currently bursting with potential!
Development of Sense and Avoid and Control and Communications (C2) systems with adequate performance are seen as the principle challenges, so a phased introduction of UAS is anticipated while these core systems are fielded and matured over a lengthy period. The current CoA approach is termed “accommodation,” while evolution is expected towards more compliant vehicles and systems during the integration phase — ultimately, with fewer and fewer CoAs. Although the Roadmap talked about “broad timelines,” this key section doesn’t try to predict how long this all might take.
The FAA summarizes the accommodation phase as:
Accommodation of UAS in the NAS through evaluation and improvement of safety mitigations.
Work with industry and the Aviation Rulemaking Committee (ARC) to review the operational, pilot, and airworthiness regulations.
Development of required standards to support technological solutions to identified operational gaps (Minimum Operational Performance Standards [MOPS]).
Safety case validation for UAS operations in NAS — collect/analyze operational and safety data.
Robust research, modeling, and simulation for UAS Sense and Avoid, C2, and human factors.
The Integration phase is characterized by adoption of FAA regulations through certification of compliant UAS and UAS systems — the balance between CoA operations and regular operations in the NAS shifts toward more compliant, and presumably more unrestricted, access within FAA regulations. With UAS and UAS systems achieving airworthiness certificates, and trained and certificated UAS pilots filing regular flight plans for UAS operations, integration moves towards adoption. “All UAS must file and fly an IFR flight plan.” Lessons learned in earlier phases are moved into updated regulations and incorporated into equipment capabilities, and certificated UAS get increasingly better access to the airspace they require.
FAA also makes mention that in the integration phase, the six proposed UAS FAA test ranges will be selected. This has been in the works for considerable time. The assessment of proposals and award of contracts had initially been delayed on the basis of privacy questions, but these now appear to have been adequately addressed to allow these key parts of the UAS integration program to move ahead. A principle objective of the test ranges is to help provide a verification mechanism for safe operations before unmanned aircraft are integrated into the NAS. Tasks envisaged include development and proving of:
manned-unmanned operations,
certification standards and air traffic requirements,
coordination and leveraging of National Aeronautics and Space Administration (NASA) and DoD resources,
civil and public unmanned aircraft systems,
coordination with NextGen (a major NAS update program currently being undertaken by FAA).
Integration will have been successfully established when new operational rules and associated standards, policies, and procedures have been established for small UAS and other UAS, and C2 link standards have been defined for integrity, latency, and continuity. FAA will also need to have accepted Minimum Aircraft System Performance Specifications (MASPS) to enable development of detailed MOPS and the FAA should have published policy and operational guidance to define acceptable methods to comply with operational rules in accordance with an acceptable UAS certification basis for each applicant, along with flight-crew training and certification standards.
For the final “Evolutionary” phase of adoption of UAS, it’s expected that there will be seamless operations of certified UAS and crew members in the evolving NAS; FAA will have published Type Standard Orders (TSOs) based on system level MOPS; and certified Sense and Avoid algorithms will be available for collision avoidance and self-separation that are interoperable with evolving NextGen ATC systems and manned collision avoidance systems.
Quite a long list of extensive requirements to meet for a new industry that, so far, has been largely unregulated and has, so far, been used to providing rapid military/governmental solutions that prove themselves operationally over time. More empirical development to satisfy specific operational needs than compliance to published regulations. This isn’t exactly a sea-state change for the industry as it sits today, but perhaps rather a shift into another dimension.
To even get itself onto this road, let alone follow this extensive 74-page roadmap, the UAS industry may have to completely re-invent itself. But with military sales declining, the funding to take on even the simplest of these requirements may be drying up. The tendency for operators may be to try to cling to the CoA system indefinitely and just live with the hassle of applying for FAA authorization each time. FAA’s seeding of commercial applications using Restricted Type Certification of existing platforms that use existing uncertified systems and payloads may also be a way out for some time. If the Scan Eagle can gain limited access to take on commercial, paying applications because it has +800,000 proven military flight hours, eventually other UAS may also creep into some sort of equivalent eligibility. And if we manage to operate safely without major headlines, the FAA may relent in some of its extensive requirements.
Then again, the FAA just published a rather extensive roadmap, with separate backup, which says it has other ideas in mind….
I asked a couple of industry experts what they thought of the Roadmap. One comment was, “To me the real challenge is flexibility in the plan such that it will be a reasonable process to adapt to changes based on findings, experiences as this goes forward.” I agree, and believe that the FAA has gone to some length to make it clear that this is the first issue of the Roadmap, that there will be updates as more is learned. The whole process is one of learning from what has gone before in earlier stages.
Please join us Thursday, November 21, for a GPS World webcast on Unmanned Aircraft Navigation. We’ll have a number of industry leaders who will present their companies’ experience and capabilities in navigation for UAS, along with how they see this exciting market segment progressing, and how the FAA’s plans could impact their vision of the future for UAS navigation systems suppliers. Register today for free.
To fly a UAV in the U.S., you’d better be able to avoid any other aircraft — and ADS-B is one component of that capability. When the FAA and agencies around the world get their UAV regulations aligned with those levied on passenger-carrying aircraft, GNSS receivers on board UAVs will likely need to be qualified to equivalent standards. One company is already there.
When I was wandering around the show floor at the Association of Unmanned Vehicle Systems International (AUVSI) in Washington, D.C., in August, I got a pleasant surprise when I bumped into an old friend I knew from Calgary. Jayanta Ray was a grad student at the University of Calgary (U of C) when I was at NovAtel a few years ago. The students of the GNSS courses at U of C were often at local Calgary ION chapter meetings I organized or attended; there were also a few joint industry-university projects, and there were many, many discussions. So meeting Jayanta (Jay) at the Accord Systems/NexNav booth was a pleasant surprise, and it was good to renew our acquaintance.
This got me thinking that maybe some of that U of C receiver magic had somehow found its way through Jay into the airborne qualified receivers that Accord Technology is offering for UAVs. Jay is actually a member of the GPS World Advisory Board, and provides a great overview of what’s good and what’s different about airborne qualified receivers in this month’s issue of GPS World.
NexNav mini is also qualified for airborne GPS and ADS-B use.NexNav mini is also qualified for airborne GPS and ADS-B use.
Accord Technology is based in Phoenix, Arizona, and is the U.S. arm of Accord Software and Systems of Bangalore India, specializing in FAA-certified airborne versions of Accord’s GPS receivers.
At AUVSI, one of the hot topics was “Sense and Avoid” — if you are to fly a UAV in the U.S. National Airspace System (NAS), you’d better be able to avoid any other aircraft, and maybe also be able to tell other aircraft in the NAS where you are. ADS-B (Automatic Dependent Surveillance-Broadcast) is one component of that capability. ADS-B uses a network of ground stations that relay ADS-B transmissions from aircraft (called ADS-B Out) in the NAS to the Federal Aviation Administration (FAA) air-traffic management system, and the signal is also available to aircraft flying in the system if they are equipped to listen to the message (ADS-B In). Air Traffic Control (ATC) can then verify that you are where you are supposed to be, and your actual position shows up more readily on their tracking systems. Right now, ATC makes extensive use of radar tracking and aircraft transponder signals to track aircraft — ADS-B will be more efficient, less costly to maintain, and is capable of aircraft-to-aircraft position reporting. By 2020, it will be mandatory if flying within the U.S. NAS.
The other part of this story is that, eventually, when the FAA and other agencies around the world get their UAV certification regulations aligned with those levied on passenger-carrying aircraft, GNSS receivers on board UAVs will likely need to be qualified to equivalent airborne standards.
Accord has already done an enormous amount of work to qualify its NexNav receivers for both requirements, and was at the AUVSI conference to let the UAV community know that these receivers are available now. If you were developing a new UAV now, with a view to selling lots into the anticipated wide range of commercial applications, its certainly going to help your case with the certification authorities to install as much off-the-shelf certified avionics as you can. Accord already sells these receivers to a number of general aviation system manufacturers, and also supplies stand-alone ‘TSO’ed” receivers in enclosures for use on a number of aircraft types. When an airborne receiver is granted the TSO (Technical Standard Order) designation by the FAA, it recognizes that the receiver has been designed, built and qualified to stringent airborne technical requirements and is authorized by FAA for use on aircraft.
So how does a company with its HQ in India get to hold an FAA TSO for a GPS receiver? Well, other than taking years to develop the receiver in accordance with approved development standards, document the hardware and software design, and conduct test and verification activities, the company also proves to the FAA that the receiver meets the FAA-specified airborne GPS functional requirements. Loads of engineering work — and then you have to convince FAA that you did it all and did it right.
Accord in Bangalore actually teamed up with AvValues in Phoenix to form a joint venture known as Accord Technology (AT) to work the project together. Most of the original receiver development work was done in Bangalore, while AT in Phoenix became responsible as the design authority, and for production, certification activities, customer service, product support, and business development. Naturally, Accord in India still does ongoing engineering support and supplies receiver cards to AT under contract. The other twist to the story is that final assembly and test is carried out at the AT facility in Anchorage, Alaska, where the TSO was approved by the local FAA office.
But Accord isn’t only into airborne receivers. The company has been around since 1991 and has significant engineering resources (around 400 electronic and computer engineers) — with more than 700 man-years of GNSS R&D and production involvement. Here are some examples of the other GNSS products which Accord has in its technology/product inventory:
GPS L1 RF down-converter.
GPS RF & baseband.
GPS module.
GPS Spacecraft Positioning System (SPS).
Time-code generator.
SPS was developed for the Indian Space Research Organization (ISRO) and has been flown on all Indian low-Earth-orbit satellites, including IRS P4/5/6, TES, CartoSat, SRE and OceanSat.
IRNSS Reference Receiver.
The Reference Receiver is fielded in the ground-monitoring network for the Indian Regional Navigation Satellite System (IRNSS), which may mean that the ground network is using at least dual-redundant reference data, as NovAtel has also provided a similar receiver for IRNSS. Accord is also working on IRNSS user receivers.
Other receivers include high-dynamic GPS-GLONASS receivers, GPS/GLONASS/Gagan SBAS receivers, an internal GPS/GLONASS/Gagan simulator, and a handheld GPS/Gagan receiver with integrated three-axis compass and pressure altitude sensor — the latter used by a number of paramilitary forces.
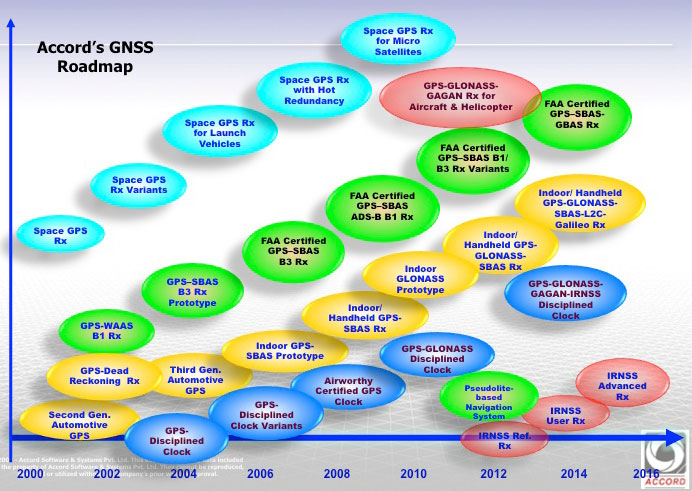
Accord GNSS roamap.
And as can be seen from the Accord GNSS Roadmap, they aren’t done yet!
You might ask yourself, where in the heck did all this come from? Certainly, there is an element of internal support with work for ISRO and Indian forces, but you don’t jump into this without some background. Well, the principle activity for Accord has been and still remains high-integrity software development for avionics systems — this is probably what Accord is known for in Europe and to a certain extent in North America. Its customer list for RTCA DO-178B/C airborne software sounds like a who’s who of aircraft and helicopter manufacturers — including Airbus, Boeing, Mitsubishi, Gulfstream Eurocopter/AugustaWestland/NHIndustries, Sikorsky, and Hindustan Aeronautics Limited (HAL).
Accord’s activities have included complete and partial life-cycle activities — all the way from requirements definition, software design and development, to independent verification and validation. For those of us who’ve worked in this field, we recognize that these are considerable technical capabilities — indeed, more than 50 engineers at Accord have been trained in the art of airborne software development by FAA-qualified engineering representatives. Working in this area and successfully bringing avionics systems through the qualification/certification process, companies either become capable or break all their bones trying! Clearly, Accord has been schooled in systems that are at the forefront of avionics technology, and has passed through the practical fire of qualifying airborne systems successfully.
So, it’s not really surprising that Accord went on to spin off into airborne GNSS receiver development once it gained wide visibility and knowledge of aviation technology and began to look at related markets. And with the Indian government policy of developing indigenous industries, Accord likely had some internal Indian customers. Quite a number of parallels with the way Europe has encouraged its own GNSS industry through the Galileo program.
With several avionics OEM manufacturers already using embedded NexNav TSO certified receivers in their systems using incorporating licensed designs, Accord looks well positioned to continue its airborne market growth. Accord’s success has so far been in general aviation, but it has wider aspirations, which include commercial transport aircraft (airline aircraft) — this is a segment which has the highest level of development/certification scrutiny and is therefore the most expensive segment in which to compete. Let’s hope Accord continues its growth and there is room in an expanding market for these relative newcomers.
This year, ION GNSS+ was once again in Nashville, Tennessee — with around 1,050 attendees and 63 exhibitors, show attendance was down from last year, maybe because of a reduced military presence and more constrained government budgets. But the conference was a good one. The CGSIC (Civil GPS Service Interface Committee) ran just before the ION conference, and provided an opportunity for better visibility of the ins and outs of the GPS program and enabled a degree of U.S. military-commercial exchange.
On Tuesday, CGSIC gave us an overview of the Navigation & Timing exhibit at the National Aerospace Museum in Washington, D.C., an insight into news of the evolving U.S. government’s PNT policy, State Department international activities (including estimates of GPS contributing $68-122 billion and 3.3 million jobs to the U.S. economy), a Homeland Security update on interference detection and enforcement, and of course the regular GPS Directorate program updates from the Air Force. Then we had subcommittee reports from various sectors, including timing, survey, and from the Federal Aviation Administration (Distance Measuring Equipment, or DME, is apparently the FAA’s chosen back-up for GPS in the National Airspace System). Finally, the GPS Directorate chief engineer provided an overview of GPS R&D activities and an opportunity for civilian attendee feedback and input.
The lone commercial presenter — Eric Gakstatter, a fellow contributor to GPS World — proposed that the Air Force make “PRED” (predicted ephemeris, regularly produced by the Air Force GPS system, but not available to commercial users) be unclassified and released for civilian use.
Both Broadcom and Rx Networks commented that they provide predicted ephemeris to their users, and post conference I let Eric know that Baseband Technologies has a software product providing predicted ephemeris which is good for 28 days without any intermediate updates. The Air Force said it would think about releasing PRED, but there seemed to be significant issues to doing that.
The ION GNSS+ conference got going on the Wednesday morning, with a whole slew of technical papers, panel sessions, and the opening of the exhibition floor. The papers tend to be quite technical and sometimes quite academic — for example, “Approaches to Obtaining Beidou Hazardous Bias with Ordered Weighted Aggregation Operators” — but these quite detailed presentations is what a subset of ION GNSS+ attendees come for, and they want to hear the results of the very latest research. One “technical session” allowed manufacturers to provide announcements and summaries of their new products and systems — a welcome opportunity for commercial and technical attendees alike. ION has also instituted panel sessions, which deal with more global subjects — for example, Program Updates or High Integrity Systems (such as WAAS), which tend to draw equal attention from a good number of attendees.
The ION GNSS+ 2013 show floor.
The show floor always seems to be the highlight of the conference, however, and its often packed at times when papers or panels are not running. With around 63 exhibitors this year, it seemed a little smaller than last year, but there were also a number of new companies with booths.
Panel Sessions
Panel sessions I sat in on included Program Updates, some of New Products, and High Integrity Systems. Program updates were provided by GPS, GLONASS, Galileo, Beidou, and QZSS:
GPS URE (pseudorange inaccuracy due to ephemeris and clock errors) is running around 80 cm and was 47 cm at one time recently, versus a “promise” of 4 meters for civil users. The average age of the older IIA satellites (SVs) is currently running around 2-2.5 time design life, and as the newer generation of satellites (SVs) comes on line, URE is expected to continue to drop.
GLONASS is performing up to expectations and is relatively stable, despite the odd jump in URE which is apparently due mostly to ground control issues. The loss of three SVs in the July Proton launch failure was a setback, but with several SVs built and in storage, Russia anticipates resuming the replenishment schedule soon. They will get to orbit mostly using Soyuz launchers, and a few Protons. There is a commitment to launch new SVs with CDMA (time division format, as per all other GNSS) on L3, while maintaining existing FDMA (unique GLONASS frequency format) signals and, indeed, one GEO SV is apparently already on orbit transmitting an L3 CDMA test signal. GLONASS has the objective of achieving 60 cm URE by 2020.
Galileo is moving along with four SVs on orbit and initial fixes achieved with both commercial and government PRS signals; 22 FOC (production) SVs are now ordered, and 16 ground reference stations and five uplink stations stations are up and running. Significant effort is anticipated on the next phases of Galileo and EGNOS, and a €6 billion budget for this work has been approved.
Beidou apparently has 14 operational SVs right now, which is adequate for regional coverage of China, but work is intended to continue towards a global constellation of five GEOs and 30 non-GEO SVs. Work is also shortly intended on a Wide Area Differential Service, chipsets are already available for receivers, and site surveys are planned for offshore reference stations. A five-year plan has been approved, and the next launch is possibly in 2014 for testing of the global (MEO) constellation.
Michibiki cartoon.
QZSS has successfully proven the concepts of operation with the first Michibiki satellite, and Japan has ordered the remaining three SVs for the constellation. The ground network contact was also let in March 2012.The intention is to achieve sub-meter service on L1 C/A, and the CLAS augmentation system is targeted to provide a ~10 cm service.
The New Products panel had way too much academic and agency content for me and virtually no commercial new products content, so quite disappointing.
The High-Integrity (WAAS-systems) panel was much more interesting for a guy who used to live in this space:
WAAS has achieved LPV-200 (aircraft landing ~200ft decisions height) across the U.S., including Alaska in 2013, and RNP 0.3 (positioning within 0.3 nautical miles) across the whole of North America and a good portion of South America. Plans are moving forward with the introduction of L5 into WAAS. If Initial Operational Capability (IOC) for GPS L5 is 2021, then WAAS IOC for L1/L5 capability should be two years later — also replacement of obsolescent elements, and doubling the comms network bandwidth.
EGNOS has another Version 3 future evolutionary stage planned, with more RIMS (reference stations) planned, and possible expansion into Africa is on the table.
MSAS has not got to the operational accuracy it wanted yet, but with the current two MTSAT GEOS, RNP 0.3 is available over Japan and area. Ten more reference sites are needed to get to LPV-200, but there is no budget yet allocated.
Gagan now has two GEOs (GSAT-8 and 10) and achieves RNP 0.1 over India and anticipates operational certification by 2014.
SDCM (Russia) is anticipated to be in place by 2016 for L1, and by 2018 expects to add L5. Currently working some interference issues between the second SDCM GEO (Luch-5B) and an Inmarsat GEO at 15.5 ̊ West, the contact for the SDCM ground network is anticipated before the end of this year, and a heavier (five-ton) GEO (called Enisey) is planned for the 95 ̊ Eastslot in 2017/18. This will carry not only L1, but also L5 and L3, both CDMA signals. There was a lot of interest at ION in when the GLONASS CDMA L3 signal would be fielded in the GLONASS constellation — no real predictions for when, but the L3 ICD release should be “before the next GLONASS K launch.”
Exhibit Hall
The exhibition was indeed a little smaller than last year, but there was plenty of activity on the floor. Most people I talked with had new products at the show, or had new information they were eager to discuss:
STIM300 MEMS Sensor.
Sensonor (Norway)has joined up with NovAtel,who is now offering its STIM300 MEMS inertial sensor as part of the NovAtel SPAN family. Sensonor apparently has a number of installs on unmanned aerial vehicles (UAVs).
Sysnav (France) has a sensor that cleverly uses Magnetic Variation with MEMS to do fairly accurate positioning in the absence of GNSS signals. Sysnav was looking for partners in North America.
Javad had his usual extensive line of surveying instruments, but his latest OEM receiver showed up with 864 channels! With three processors, program memory, multi-constellation (everything!) and monster channel tracking (100 of which scan for GNSS interference), this by far had the greatest receiver capacity at the show.
Trimble announced its latest tiny BD930 RTK capable OEM receiver — supporting both triple-frequency GPS and GLONASS, plus dual-frequency Beidou and Galileo. And it’s completely enclosed in an RF screening “can.”
ComNav (China) showed up with a series of multi-frequency, GPS/Beidou/GLONASS RTK-capable OEM receivers, packaged receivers, and antennas. With 100 people based in Shanghai, ComNav claims to have captured 30% of the Chinese market, selling 15,000 receivers — derived from technology developed by Dr. Wong Yong Quan. Impressive capability on display — also seeking distribution in North America.
Surrey Satellite (UK) are apparently working on a number of R&D projects alongside building the nav payloads for the Galileo FOC SVs. TechDemoSat-1 is an innovative UK technology platform that includes a GPS reflectometry experiment to measure wave intensity for marine weather services. Apparently there is little weather information for large areas of the world’s oceans, and this may help to solve a major marine nav issue.
Nottingham University (UK) is working on predictive integrity for UAVs. GNSS signal outage/degradation in flight, caused by antenna obscuration, multipath, fading due to adverse geometry and Doppler shift, are critical for UAVs. Nottingham modeling is aimed at real-time avoidance of safety-critical flight conditions and fast recovery of navigation performance following GNSS data losses.
Trusted Positioning (Canada) is moving quickly down the indoor location path and has some neat software integration solutions for cell phones using signals of opportunity, pressure sensors and MEMS. The company sees the initial market being for things like mapping indoor locations, iteratively improving positioning, and location-based advertising.
Spirent GSS6425 record and playback system.
Spirent has released the GSS6425, which is a highly portable simulation system for recording live GPS L1/L2/L5, GLONASS L1/L2/L3, BeiDou-2 B1/B2, Galileo E1/E5, QZSS L1/L2/L5 and SBAS signals in the field — for repeated replay in the lab. BeiDou has been introduced across the Spirent simulation product line, and Spirent released information on sophisticated spoofing simulation.
IFEN (Germany) is also working on spoofing, has added BeiDou B1 and B2 signals, has added a four multi-RF output capability, and is working on automotive gyro and odometer testing capability.
R&S DDF007 Portable I/F Direction Finder.
Rohde & Schwarz had an extensive display of capability alongside its SMBV 100A GNSS simulator. An impressive array of spectrum analyzers and generators, with one set-up catching my eye — the DDF007 portable interference detection system used by government agencies for tracking down jammers.
I didn’t get to everyone’s booth, and I just didn’t have the space to cover everything, but I’d call this a reasonable cross section of the exhibitors; to some degree its a summary of the panels and includes some of the corridor discussions typical of ION.
So, I would call this another successful ION show, and I’m looking forward to next year’s ION GNSS+ conference in my neck of the woods in Tampa, Florida, in September. It would seem that the interest level remains high across academia, agencies and industry — but those of us who may still want to see new business as payback for the investment of attending and/or exhibiting, I think we would have preferred still more commercial content.
ION remains a place to meet and greet customers and people working across multiple market segments, where system providers can brief us and mix with users, and the intensity of technology development and research can be shared and sampled. It’s still an invaluable place to visit once a year if you are connected in any way to the GNSS industry and community.
The Association for Unmanned Vehicle Systems International (AUVSI) convention held August 12-15 in Washington, D.C., has been the global marketplace for all things unmanned for the last 39 years — and I was walking the floor trying to find who uses GNSS to do what.
The first thing that hit me is that this is one humongous show! More than 7,000 attendees and close to 600 exhibitors — that’s a lot of people to talk to and a lot of carpet to walk! All the big guys came — most with full-size UAVs on their stands. A good cross-section of companies making and using GNSS were here, too.
At the show, the big news was that FAA had granted two UAS a “Restricted Type Certification” — which most people assumed would allow somewhat unrestricted operation in civilian airspace. But alas, it seems at least for the Boeing/Insitu ScanEagle, that their intended operation — launching from ships off the coast of Alaska looking for whales and ice-flows for oil giant ConocoPhillips — is still quite restricted and appears to be very similar to what FAA has previously authorized under Certificates of Authorization (CoA). Nevertheless, for a vehicle that has already accumulated more than 730,000 reliable flight hours, it’s a step towards regular commercial operations.
The Insitu ScanEagle.
And how does the ScanEagle navigate? Its military cousin, which the U.S. Navy calls the RQ-21A “Integrator,” now uses an integrated autoflight system with a SAASM receiver that can achieve centimeter-level RTK performance. The Rockwell Athena integrated flight system now includes two integrated, next-gen SAASM receivers providing RTK performance via an external processor. RTK capability was evidently developed over a four- or five-month period, and now provides cm-level accuracy over a +10-Km range from the RTK base station.
The Athena 511 INS/GPS/ADAHRS/flight control system.
With the launch of the Rockwell Athena SAASM RTK solution, UAVs such as Insitu’s RQ-21A can now have centimeter-level GPS navigation accuracy and also benefit from the high-security features of a SAASM GPS receiver to enable autonomous capture, landing, and other operations. Rockwell also announced during the show that its GB-GRAM-M (M-code GPS receiver) was recently used in a test flight where live military code (M-code) signals were used for the first time to successfully navigate an aircraft. The flight, which took place at Holloman Air Force Base near Alamogordo, N.M., in June, successfully tested the Rockwell GB-GRAM-M integrated into the RQ-11B Raven unmanned aerial system.
The AeroVironment’s Puma AE received the same Restricted Type Certificate as the ScanEagle. The Puma is expected to support emergency response crews for oil spill monitoring and wildlife surveillance over the Beaufort Sea, but AeroVironment hasn’t yet announced a commercial partner it will work with on this. Both newly certified UAS — Insitu’s ScanEagle X200 and AeroVironment’s Puma AE — are “small” UAVs weighing less than 55 pounds. Each is about 4-½ feet long, with wingspans of 10 and 9 feet, respectively. The ScanEagle’s often operates off-shore and is recovered by a crane-supported vertical wire into which the UAV flies and is captured by hooks on the end of its wing — hence the need for RTK-level precision navigation. The Puma AE is man-portable and can be assembled quickly, hand-launched, and recovered on sea or land.
The Ashtech MB-One.
Meanwhile, on the show floor at AUVSI in D.C., we tracked down most of the manufacturers who make or incorporate GNSS into products aimed at the UAV/UAS segment:
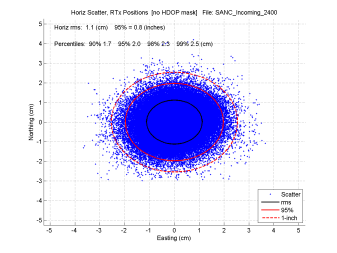
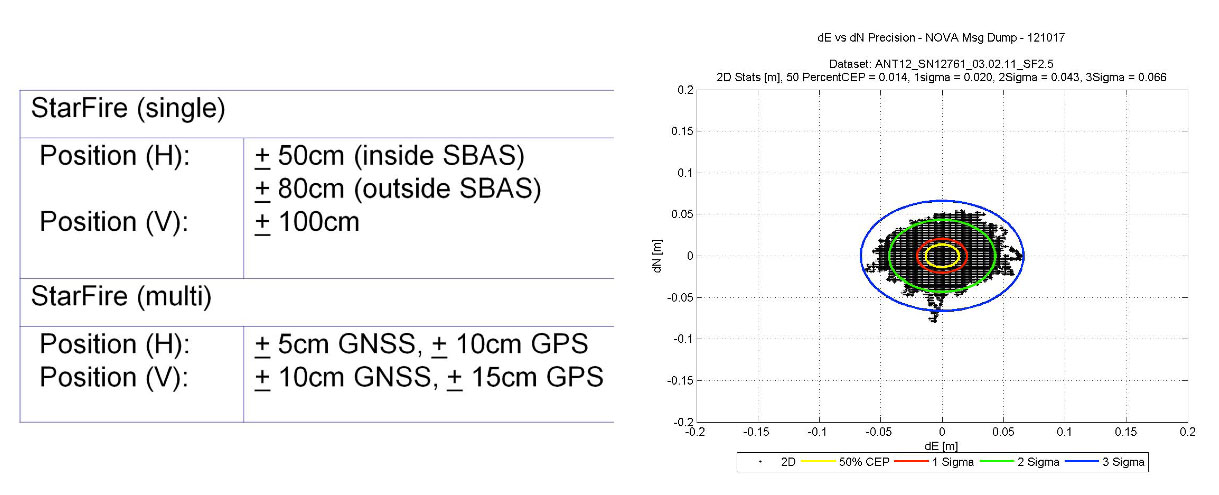
Navcom provides service over its StarFire PPP (precise point positioning) network for a large number of UAV/UAS operators, including most U.S. military forces.
RT-Logic works on algorithms to improve anti-spoofing capabilities.
Topcon demonstrated its capabilities across a large number of vertical segments, including ground machine-control, survey, and construction, and is looking for UAV segment openings for its latest B110 compact dual-frequency OEM board.
ING Robotic Aviation is a typical GNSS user for auto take-off and landing for rotary and fixed-wing small UAVs — apparently integrating NovAtel RTK receivers.
Northrop-Grumman integrates mostly SAASM receivers into its LN-251 advanced airborne INS/GPS for mil-spec UAV applications.
SBG Systems is one of several companies offering compact MEMS and FOG INS with integrated GPS receivers — both commercial and mil-spec tactical versions.
The Trimble AP15.
Trimble introduced the Ashtech MB-One OEM receiver, which features an enhanced dual-core, dual-frequency, dual-antenna GNSS engine with 240 channels capable of tracking GPS, GLONASS, Galileo, BeiDou, and QZSS, with both SBAS and L-band corrections. The MB-One can work as two separate, independent receivers, both capable of RTK positioning or provide accurate heading and attitude — a significant capability needing pretty hefty processing! Trimble’s new AP15 embedded GNSS/INS was also announced at AUVSI. Within the last two months, Trimble has apparently combined the operations of their own OEM and Ashtech OEM groups under one management. So it has bags of technology and skills with which to move forward on the OEM receiver front — some powerhouse in the OEM marketplace!
L3 has now completed qualification and security certification for its in-house developed TruTrak Evolution Type II SAASM receiver. With a number of assessments and evaluations already under way, customers are now able to move onto production applications following achievement of these two key milestones.
Septentrio announced that Raven Aerostar has successfully integrated the GPS/GLONASS AsteRx2eH heading/positioning receiver into its TIF-25K unmanned aerostat system, minimizing receiver hardware.
Xsens, Gladiator, MicroStrain, Sparton and Vectornav all exhibited a range of integrated MEMS inertial/GNSS devices for UAVs — each year these packages appear to become smaller, lighter and more capable.
NovAtel has evolved its GAJT anti-jam CRPA system to split the receiver/processor electronics from the CRPA antenna. It now uses a four-element CRPA from Antcom, but says the system will work with any four-element CRPA array. A Marine GAJT-700MS is also in the works for release in late 2013. The OEM638 240-channel receiver “tracks all current and upcoming” GNSS constellations, and with 100-Hz RTK is ideally suited for all UAV navigation tasks. NovAtel has in the past been very successful providing commercial receivers for a large number of UAVs, and interest at their booth appeared to be high.
The NexNav/Accord GPS Sensor Unit.
NexNav/Accord is reportedly supplying its TSO C-145 qualified Max receiver to Free Flight for its airborne system, and also to several other avionics systems suppliers. As UAV/UAS move towards operations in civil airspace, FAA TSO-qualified receivers such as Max and its derivatives will likely become an important element in UAV airborne certified flight management systems. NexNav mini is apparently configured to provide ADS-B Out data, which could well form part of the future sense-and-avoid solution for UAV/UAS.
Geodetics has been busy since last year’s AUVSI convention working on relative navigation and establishing a solid distribution chain. Its GEO-ReINAV provides precise 1-2 cm relative position and relative orientation within 0.01-0.02 degrees between moving platforms — so ideal for UAV aerial refueling and precision landing.
Hemisphere GNSS is offering its OEM receiver line for UAV guidance systems, in particular its Vector H320 L1 GPS/GLONASS heading receiver. Hemisphere promises there will also be new product and company announcements at Intergeo in Germany and at ION GNSS in Nashville.
Xavier ORR demonstrates Spatial FOG.
Advanced Navigation from Sydney, Australia, has integrated the KVH 1750 FOG IMU with a Trimble BD90 L1/L2 GPS/GLONASS, Galileo E1/BeiDou L1 to come out with what they call a Spatial FOG. Coupling ultra-high accuracy KVH fiber optic gyroscopes, accelerometers, magnetometers, and a pressure sensor with an RTK GNSS receiver via a sophisticated fusion algorithm delivers highly accurate and reliable navigation and orientation.
Micropilot, based in Winnipeg, Canada, is one of a select few companies who have been very successful in supplying the UAV/UAS industry with a line of autopilots with embedded GPS. Micropilot currently uses an embedded u-blox chip and has one version that adds a NovAtel dual-frequency receiver for triple redundant installations. Its approach is to be very open with its UAV customers to allow them to customize control laws to suit individual vehicle dynamics. Most of its customers are supplying UAV/UAS for civil applications. Micropilot has apparently done a lot of work in developing a suite of verification tools that may assist future civil certification. For military applications, Micropilot mostly embeds Rockwell SAASM receivers.
Micropilot’s display.
Cloudcap continues to provide its Piccolo Autopilot line using both u-blox chips and a version with a Navisys GM-601 GPS smart antenna module, which actually uses a u-blox 6 chip and patch antenna.
Oxford Technical Solutions brought its RT3000 and RT2000 inertial/GPS measurement units to AUVSI, along with a new mini MEMS version designed for geolocation post processing; a real-time version should be available next year.
So, once again AUVSI has been one heck of a show, with more to see and learn than the available time seemed to allow. And for those exhibitors who I wasn’t able to include, I can only beg for forgiveness — space and time are limited. There were lots of vehicles and lots of vendors supplying the UAV/UAS industry represented at AUVSI, particularly GNSS and GNSS/INS integrated products for navigation, guidance, flight control, surveying and platform stabilization.
Anti-drone strike protesters outside the AUVSI Conference.
And the majority of exhibitors are thinking more of the commercial market as their military business continues to contract — which may please the group who showed up at the doors of the D.C. Convention Center deploring the potential collateral damage that UAVs are purportedly creating in the U.S. war on terrorism.
And for this UAV/UAS commercial market segment, the opportunities seem to be growing, along with the expectation that FAA will begin to move faster to enable many more commercial applications in the near future.
The Insurance Institute for Highway Safety (IIHS) has contracted Locata to provide local, ground-based precision positioning signals for vehicle testing in a new $30-million expansion at the famous Vehicle Research Center, focused on vehicle automation testing. A novel indoor section of the expansion will allow replication of parking garages and urban canyons — where GPS will be largely masked — and will enable evaluation of technologies such as forward collision-avoidance systems in adverse conditions.
Used to be that changes to equipment in and on cars took decades to enter production. As an example, just how long did it take to get headrests/restraints into most vehicles? Restraint patents were originally filed in 1921, and people started to get interested in putting them in cars in the 1950s, but they didn’t start to show up in vehicles until the 1960s and weren’t mandated until 1969 in the U.S. Since then, the rate of technology adoption by the automakers has accelerated.
Now, it seems that almost every new car has Internet, Bluetooth phone, GPS navigation, rain-sensing wipers, touchscreen, automatic foot sensing/hand waving/touch sensitive lift-gate/door-locks/touchscreens, and even massaging seats and automatic seat positioning… And safety devices galore, including multiple air-bags and anti-lock braking systems, rear-view cameras, intelligent speed adaptation, and now even lane-departure and forward collision mitigation/collision avoidance systems.
Safety has finally become a major selling feature on almost every make and every model, thanks in large part to organizations like the Insurance Institute for Highway Safety (IIHS) and the Vehicle Research Center (VRC) near Washington, D.C. The VRC is the principle location for U.S. vehicle crash testing that we see regularly on TV and YouTube videos with crash-test dummies being bashed around in all sorts of simulated vehicle accidents. These tests have led to significantly enhanced safety features in today’s vehicles.
Instrumented crash dummy preparation. Photo: IIHS
Automation in vehicles, particularly automation of safety devices, is seen as the next most promising phase of vehicle safety improvement. And as these safety devices become more complex, they need to be verified in realistic conditions. Hence, the VRC is now undertaking a major expansion of its testing capabilities with the addition of a continuous vehicle test track that transverses not only open-air roadway areas, but also includes a 300-foot by 700-foot fully covered testing area.
Covered test track section expansion. Photo: IIHSExterior test track links new VRC facilities. Photo: IIHS
The $30 million upgrade will include a Locata supplied LocataNet, which will provide the VRC with high-precision positioning to enable rigorous, consistent and repeatable scientific evaluation of new vehicle crash avoidance systems. Along with the cm-level positioning provided by the Locata network, VRC is also working on state-of-the-art robotics to enable the required level of testing precision. The LocataNet will furnish the IIHS with a locally controlled positioning system that is seamless over all the VRC test areas, including extremely accurate and consistent automated positioning of vehicles.
In the covered enclosure, VRC intends to set up collision avoidance testing for areas such as parking garages and urban canyons — areas where GPS is either not available, or is degraded to a level where positioning is intermittent or isn’t available. Locata will provide a consistent level of accuracy and reliability that the VRC requires for these GPS-degraded scenarios.
The VRC site currently looks very much like a construction site with the track extensions under way and the under-cover area just starting to be built. The VRC facility will come online in two stages — the outdoor track before the end of the year and the indoor around early Q2 next year. Locata engineers have been working with Perrone Robotics on very early integration testing. Perrone is contracted to deliver a system for testing vehicle safety systems in the test vehicles that IIHS is testing. For the first phase, the system includes a robot target vehicle with the footprint of a car, but only 4 inches high and 1 inch of ground clearance. If the vehicle being tested fails to prevent a collision with the robot target vehicle, the test vehicle runs over the robot target vehicle, dislodging a soft target, but avoiding damage to the test vehicle, robot target vehicle, or soft target.
(For a feature article on the Perrone Robotics soft-target unmanned ground vehicle and drop-in actuator kit, see the upcoming August issue of GPS World magazine.)
To ensure that the test vehicle drives repeatedly, the system also includes a drop-in actuator kit that can be installed into any test vehicle in 30 minutes or less. The system is designed to allow a human driver to sit comfortably in the vehicle and drive, but is also capable of controlling the throttle, brake and steering to drive test profiles. Perrone is using Locata as the positioning system. In addition to alleviating concerns about GPS outages or dead/weak signal spots, it also allows the system to be operated on the new, covered IIHS test track currently under construction.
DARPA Urban Challenge Peronne Robotics car. Photo: IIHSVRC robotic system using Locata positioning. Photo: IIHS
The Locata network has been running from ground-based tripods scattered around the track wherever construction will allow. IIHS will construct 30-foot masts on which to place Locata antennas, but even that is still several months away.
Locata’s autonomous positioning technology uses terrestrial networks that function as a “local ground-based replica” of GPS-style positioning. Locata works with GPS, but can also operate independently when GPS is not robust or is completely unavailable. Instead of orbiting satellites, Locata utilizes a network of small, ground-based transmitters that blanket a chosen area with strong radio-positioning signals. Because it is terrestrially based and provides relatively high power signals, Locata works in any internal or external environment.
A fundamental requirement for radio-positioning systems is nano-second-level synchronization of all transmitters in the positioning network. In the past, multiple atomic clocks were used to achieve this level of synchronization. Instead, Locata’s technology relies on a patented synchronization method called TimeLoc, which allows Locata to replicate GPS in a ground network.
Locata’s technology encompasses both the transmit and receive sides of the positioning network, allowing the system to be configured to meet specific, localized demand for availability, accuracy and reliability. This flexibility ensures that signal integrity can be guaranteed in even the most demanding environments — especially indoors, like the covered test track section of the expanded VRC.
Locata has also made significant progress in North America with the recent award of a contract to instrument the White Sands Missile Range to Locata’s partner TMC Design.The 746th Test Squadron’s new non-GPS-based positioning system is expected to be operational by Q3 2013, with a network that covers 2,500 square miles (6,500 square kilometers).Locata technology will provide the USAF’s “gold standard GPS truth system,” supplying continuous centimeter-level, independent positioning when GPS is completely jammed. This award followed several months of U.S. Air Force testing and evaluation of an initial LocataNet installation at the White Sands facility.
So, following the recent IIHS endorsement of the Locata technology for use at the VRC, Locata appears to be well on the way to acceptance as a reliable truth system for use alongside GPS. Along with other mining-related installations elsewhere in the world, it would seem that we are no longer in evaluation mode; rather, we should anticipate other future Locata production installations.
How Navsys Leverages Military Expertise for Business
The financial landscape is changing in a number of ways for a lot of GNSS businesses due to the U.S. government sequester and to a larger extent due to the U.S. reduction in military spending. The larger multinationals and prime contractors may have achieved pretty well diversified scope for their operations, and most have existing commercial products or operations where they can pump up resources and investment to improve their commercial market and product positioning. But a number of small businesses have discovered that their military and government clients of the past no longer have the same level of funding available for key projects. So their search is on for commercial opportunities, and the transition to a commercial business model may present a significant change in the way they operate.
Navsys Corporation in Colorado Springs is located just outside the gates of the U.S. Air Force Academy, so it’s not unusual that its customer base reflects a close association with the U.S. military and its prime contractors.
When someone in the military had a challenging GNSS or related technology problem in the past, it was often Navsys who was able to offer an innovative solution, through a Small Business Innovation Research (SBIR) proposal — and the company was actually awarded nine SBIR Phase II contracts over the last five years. Phase II SBIR contracts are designed to transition mil technology into commercial products either via government organizations or commercial outfits. Often in the past, prime contractors responding to a larger mil-spec requirement would also roll Navsys into their response when part of the requirement involved a GNSS navigation or related solution. So since 1989, the development of GNSS technology and products, and the publication of papers describing those technologies and products, have been pretty continuous at NAVSYS:
Extended wide area differential GPS
WAAS bent-pipe signal generator (SIGGEN)
GPS/inertial video registration
Digital beam-steering GPS receiver
JLOC Jammer Detection and Location system
Indoor location
GPS phased sensor array
Software-defined receiver
JLOC has been a long-term active government project for more than 10 years. SIGGEN technology has been part of Japan’s MSAS system for more than 10 years, and is an example of a successful product that has transitioned from government research into the commercial sector. And, of course, the first GPS-enabled cell phone, developed by Navsys Corporation, is now on display at the Smithsonian National Air and Space Museum’s Time and Navigation exhibition in Washington, D.C. Developed for the Colorado Department of Transportation’s Emergency Vehicle Location System Mayday platform in 1995, this important step in GPS history paved the way for positioning to become an integral component of today’s communications technology.
The complement of professionals on staff at Navsys has changed throughout the years, driven largely by how many projects were contracted at any one time, but the group has always had a very high standard of qualifications and experience and has inevitably exhibited a large degree of flexibility and creativity. Nowadays, moving to better align with commercial opportunities, Navsys helps companies solve challenging problems relating to GNSS, inertial, and simulation/testing. Cultivating business-to-business partnerships allows the company’s technical expertise to compliment and strengthen end-user products or applications. So companies are able to use Navsys as a technical resource for product development at a lower cost than developing their own in-house navigation solutions. And many of the technologies and core capabilities that they turn to stem from prior research and development into government and military applications. As projects mature, they transition into industry-leading products and services. Navsys’ industry partners and customers then go on to customize these capabilities into commercial applications in the marketplace.
One of the key technology/products that Navsys is pursuing includes InterNav modular GPS/inertial embedded software. It provides a real-time tightly coupled GPS/inertial solution that can be precisely aligned with additional sensors, including digital video products and laser rangefinders.
InterNav software provides geo-registration for SAFIRE. Photo: NAVSYS
InterNav software may be embedded into OEM applications including commercial-off-the-shelf GPS/INS systems, unmanned platform navigation and stabilization systems, and remote sensing geo-registration. The above graphic shows how InterNav provides highly accurate geo-registration for FLIR’s Star SAFIRE electro-optic imaging system.
With other key customers such as KVH also using InterNav in some of its integrated inertial products, Navsys appears to be well on its way to penetrating a market segment that has previously been a space occupied by companies such as Applanix, Teledyne, and iMAR.
Another area where Navsys has had some success is GNSS simulation and test. The GNSS Signal Architect product suite includes Simulation and Toolbox software and test-set hardware.
Photo: NAVSYS
Simulations of GPS or GLONASS are created based on static or dynamic scenarios. Users specify a complete set of simulation parameters, including receiver/satellite profiles and delay/noise error modeling. Playing back the simulation as an RF signal provides accurate and repeatable signals for GNSS receiver testing.
Signal architect user. Photo: NAVSYS
Toolbox includes a number of GNSS MATLAB utilities, including geographical, satellite geometry and receiver design/analysis tools. Test set is made up of a signal control unit computer and a software-defined radio and includes a wideband transceiver daughterboard.
Navsys has in the past provided extremely accurate GPS scenario generation software for end-user GPS simulator products, and the SatGen GNSS signal generator has also been released by Racelogic using Navsys Signal Architect Signal Simulation software.
Other technology/products currently in the works include Precision Geo-Registration and Remote Sensing, Geo-Referenced Imagery, Video-Aided Inertial Navigation and GNSS/Inertial Simulation.
GPS/inertial InterNav technology has been used to develop Precision Geo-Registration and Remote Sensing,which extracts precise coordinates from video imagery without requiring any known data points. The key technology advantage is a precision GPS/inertial alignment technique that enables accurate camera alignment and aiming (<1 mrad attitude) using only low‐grade inertial sensors.
Video-Aided Inertial Navigation uses an algorithm update technique that leverages image aiding from tracking ground points to further refine alignment accuracy. When combined with the GPS/inertial alignment algorithm, significantly improved alignment accuracy can be achieved over current GPS/inertial integration approaches.
Photo: NAVSYS
So, as defense spending continues to contract, Navsys and other similar companies with an existing “treasure chest” of technology created for previous military programs are successfully adapting. Not only are skillfully modified, repackaged or even further advanced technologies and products being brought to the commercial marketplace, but their approach to business development, marketing and sales is beginning to take on the face of commercial operations. Business plans, carefully chosen projects and internal investment are beginning to replace responses to Commerce Business Daily (CBD) and Federal Business Opportunities (FedBizOpps) as a way to conduct business. It’s a brave new commercial world out there and Navsys amongst others is ready, prepared and able to adapt and succeed.
It used to be that if you were going to build an RF navigation receiver, you had to also build your own simulation system to test it. I remember working with a couple of “home-built” RF simulation systems myself, way back when. We experience a lot of maintenance and support issues. And, of course, if you build something and also build something to test it, its likely that incorrect assumptions will end up in both systems. Today, there are a number of excellent sources for GNSS simulation equipment and support you can buy on the open market.
The spectrum of today’s providers seems to range from highly sophisticated scientific systems used for development by precision receiver manufacturers, through systems with GNSS and aiding solutions, to specialized systems for both general and specific application developers and also for production test. So this month I’d like to try to summarize (in no particular order) what some of the suppliers of GNSS simulation systems are up to, how they may be positioned in the market and, wherever possible, what we might expect to see from them in the future.
GSG Series 6 GNSS simulator.
Spectracom is a more recent entrant to the GNSS simulation market, though the company has been providing frequency and time synchronization test equipment for about 40 years. Spectracom has integrated GPS into these products for more than ten years, and decided three years ago to use the knowledge it had gained to get into the GNSS simulation business.
The GSG family of simulators is positioned at the “affordable” end of the simulation equipment scale, and is targeted at users and integrators of GNSS, rather than developers of receivers. Spectracom claims to have about 80 percent of the features of the top-end simulations systems, but its more capable (Series 6) systems sell in the $20-30k range. While new to the business, the Spectracom team feels that this allows them to bring the newest technology and innovation to the market.
The Spectracom system is derived from its well-known frequency/time synthesizer equipment — in fact, it has the same look front panel and chassis — and also makes use of the same “easy-to-use” concepts. “It doesn’t take a navigation scientist to operate these simulators,” said John Fischer, chief technology officerat Spectracom. The accompanying Studio View software is reportedly relatively easy to use to generate trajectories and other test scenarios by connecting to Google Maps and uploading them to the simulator.
But with all new firmware and FPGA implementation, 64 channels, and four frequency bands covering both GPS and GLONASS, the GSG family appears to be very well positioned for application developers integrating GNSS. Galileo and Beidou/Compass are in the works and expected this year, and will be supplied as upgrades to existing equipment.
Spectracom anticipates significant growth in its target market for application developers in “anything that moves,” including automotive and airborne, video matching, radar/lidar, and handheld nav devices, including mobile phones. Spectracom has a number of product lines and around 100 people working for them, but the GNSS simulation group is around 12 strong.
Rohde & Schwarz is another relatively recent GNSS simulation entrant with new products for the market.
SMBV100A vector signal generator.
Its current offering — the SMBV100A Vector Signal Generator – can simulate 24 dynamic GPS, GLONASS and Galileo satellites. The SMBV 100A has wide bandwidth and high output power levels. Real-time test scenarios can be customized by the user — including a neat facility that allows modeling of satellite masking by downtown buildings, along with anticipated multipath for the same urban scenario.
While somewhat new to GNSS simulation, R&S has been around since the 1930s, and its experience with frequency synthesizers and similar equipment is being carried forward into what the company terms its “cost-effective” GNSS simulation offerings. R&S anticipates significant growth in automotive, aerospace, UAV, and cellular assisted-GNSS application markets.
R&S has had success in the aerospace market for UAVs, and has developed the capability to model antenna patterns and UAV body mask as the vehicle rotates and attitude changes towards visible satellites. Along the same lines, R&S has hooked up its system to flight simulators and provided hardware-in-the-loop testing for clients. R&S also has the ability to run simulation scenarios for long periods of time, and for “very long” periods if the receiver is stationary — this feature makes use of large internal memory storage within the SMBV100A; of course, almanac validity limits just how long this is possible. P-code capability is provided as an option, and there is a roadmap for adding SBAS and Beidou capability later.
IFEN NavX-NCS Professional
In the meantime, IFEN in Germany is focusing on its NavX-NCS Navigation Constellation Simulator range of multi-GNSS signal simulators.
IFEN emphasizes the flexibility of its design, with a platform scalable from a 12-channel GPS L1 system up to a full multi-GNSS system with 108 channels and 9 frequencies for GPS, GLONASS, Galileo, QZSS and SBAS. With this building-block approach, channels and capabilities can be added as and when additional testing complexity is required.
IFEN claims that the capability to generate all GNSS signals — by combining different modulations with up to nine L-band frequencies — is the only existing solution on the market providing GPS, Galileo, GLONASS, QZSS and SBAS in one chassis at the same time. And, since April 2013, all IFEN NavX-NCS GNSS RF signal simulators are to include BeiDou B1 signal capability in accordance with the official Chinese BeiDou B1 ICD, and are ready for the other B2 and B3 BeiDou signals.
IFEN also founded a subsidiary in the USA in January this year called IFEN, Inc., located in California and operational with Mark Wilson (formerly with Spirent) as VP Sales. In addition, IFEN has formed a partnership with WORK Microwave — a leading European manufacturer of advanced satellite communications and navigation equipment. WORK Microwave is responsible for RF and digital hardware design while IFEN develops the associated software and manages the distribution of the product range.
Little-known IP-Solutions in Tokyo, Japan, has been working to develop its ReGen GNSS DIF signal simulator, a software simulator that simulates ionospheric effects, generates digital IF (DIF) signals similar to those recorded by an RF recorder, and comes with an optional capability of simulating integrated inertial navigation.
IP-Solutions’ digital IF baseband signal simulator ReGen has been developed in close cooperation with the Japan Aerospace Exploration Agency (JAXA) to test and validate GNSS signal processing algorithms and methods for use on board aircraft using tight and ultra-tight integration with INS, including specific scintillation models and ionospheric bubble simulation.
Actual recorded flight data (left), ReGen replicated flight data (right).
Various configurations of ReGen can produce multichannel GPS and GLONASS L1 signals and single-channel GPS L1, L2, L5 and GLONASS L1 and L2 signals, as well as simulating noise and interference.
Meanwhile, Spirent, arguably the original market leader in GNSS simulation, has continued along its chosen path of supplying the industry with the greatest capability and most extensive simulation systems.
Spirent has recently released test systems with support for China’s BeiDou Navigation Satellite System in addition to GPS, GLONASS and Galileo.
Spirent started shipping BeiDou-ready systems to its customers in 2012. Now these may be upgraded to full BeiDou capability using the information available in the first full issue of the BeiDou-2 Signal In Space Interface Control Document (ICD).
Also aiming at mobile applications, Spirent’s Hybrid Location Technology Solution (HLTS) integrates Wi-Fi, Assisted Global Navigation Satellite System (A-GNSS), Micro Electro-Mechanical Systems (MEMS) sensor and cellular positioning technologies. HLTS integrates four very different and distinct location technologies and provides repeatable and reliable lab-based characterization of mobile devices supporting hybrid location technologies that will enable “accurate everywhere” location — including indoor user location determination.
Other notable players in the GNSS simulation business include Racelogic, CAST Navigation and Agilent who are each pursuing their chosen niches in this expanding market segment. Racelogic’s LabSat GPS simulator is gaining popularity with a number of leading companies, providing the ability to record and replay real GNSS RF data as well as user-generated scenarios. CAST has an extensive line-up of GPS and GPS/INS simulation systems and support software, and Agilent has added to its impressive electronic testing portfolio with a very capable looking GPS simulation product line.
Several other companies — some based in China and Russia — are also trying to figure out their development and marketing strategies to conquer their chosen GNSS simulation market niche. This is all a very healthy sign that there are many other companies with new embedded GNSS applications that they are bringing to market and who therefore need GNSS simulation/test capability. Overall, this means there is still significant growth underway and far wider applications of GNSS on their way to market. Great news for the GNSS industry!
Indoor location research and fielded developments currently focus on consumer-level applications, mostly using mobile phone handsets, but this work will hopefully also benefit professional and high-precision uses of GNSS. Indoor location technologies could be of particular interest in machine control for warehousing, industrial assembly, indoor and even underground mapping, underground mining, in forestry where dense canopy virtually cuts out GNSS, construction, and other areas where sky-view is limited or negligible.
Tune in to Indoor Nav Webinar Thursday
Tune in to GPS World’s webinar, “Indoor Positioning and Navigation: Results of the FCC’s CSRIC Bay Area Trials,” on Thursday, April 18. Speakers include Khaled Dessouky (Technocom); Ganesh Pattabiraman (NextNav); Norm Shaw (Polaris Wireless); and Greg Turetzky (CSR). Registration is free.
Professional users will want to keep abreast of developments in the E-911 area, and be aware as achievable accuracies begin to approach what could be possible for precision applications. Right now, that’s maybe a pretty big stretch, but taking a look periodically is a good idea. A recent round of landmark tests by the Federal Communications Commission (FCC) provides just such an occasion for a look-in.
The U.S., E-911 legislation put in place back in 2001 required that both landlines and cellphones should provide the location of callers to within specific accuracy levels. Location information was to be sent transparently to Public Safety Answering Points (PSAPs) which would allow fire/rescue/police personnel to be dispatched to the location of the 911 call. For mobile phones, cellphone manufacturers and network providers forged ahead and implemented a number of location strategies using differing technologies — all require being outdoors where a clear sky-view is available.
GPS and augmented GPS technologies were only part of the cellphone solution. Other implementations included use of the cell-signal itself, along with an extensive database that can contain, amongst other things, signal attributes and network asset locations. Turns out that, today, around 60 percent of mobile phone calls are made within buildings, so the FCC started to investigate how to bring E-911 capability to indoor calls.
In 2011, the FCC commissioned a group called the Communications Security, Reliability and Interoperability Council (CSRIC), and Working Group 3 (WG-3) is the one currently investigating what can be done for indoor E-911 location. Drawn from interested industry participants, the WG-3 Location-Based Services (LBS) sub-group set about finding what technologies exist, how well they work, and how they could be applied to E-911. Now, there are a lot of people trying to crack this problem and many, many ways that it’s been tackled — all of which are at different stages of development and with differing levels of capability. In order to make definitive progress, WG-3 LBS decided that a test-bed was the best way to evaluate and compare what’s currently available.
Seven vendors signed up initially, but only three — NextNav, Polaris Wireless, and Qualcomm — completed the rigorous testing, which set out to basically establish horizontal and vertical accuracy, speed of location, and reliability and consistency of results for each system. The trial tested the performance of location systems across urban, suburban and rural areas in the San Francisco Bay Area. More than 13,000 test calls were placed from various tested technologies in 75 different indoor locations selected by participating public safety organizations from around the U.S. Click here for the full report.
In the tests, Polaris Wireless used an RF pattern matching/fingerprinting technique, Qualcomm used a hybrid Assisted-GPS (A-GPS)/Advanced Forward Link Trilateration (AFLT) system, and NextNav used wireless beacon technology. NextNav came out on top, and largely within the magical 50-meter “search ring” requirement, and was the only vendor to provide vertical location capability.
NextNav uses pressure transducers in its beacons and in the handheld units to accurately measure calibrated altitude — within about 2 meters — so it can actually report the floor where the handheld is located; it’s the only system tested that was able to do so. Apparently the use of MEMS pressure sensors in cellphones is forecast to increase to 681 million units in 2016, so this could be the right approach.
NextNav is focusing on the San Francisco market, where the company has fielded a significant number of beacons, but it has also placed beacons in another 40 metropolitan locations across the U.S. NextNav has acquired appropriate spectrum rights to transmit a 900-MHz “GPS-like” signal that’s synchronized to GPS. This enables good penetration into most urban buildings — both high-rise and those with fewer floors.
To support adoption of its solution, NextNav is working with a chipset manufacturer to incorporate processing of its location signal within an upcoming spin of an embedded cellphone chipset. While other solutions have adopted Wi-Fi and cell-signal solutions, NextNav contends that its approach is the most cost effective, as beacon deployment is geographically less dense and can be amortized over so many users.
NextNav Beacon.
Other solutions also apparently rely on the use of databases that store signal characteristics and a number of other parameters – the CSRIC report highlights the complexity this brings to database management and maintenance. NextNav also has a database, but this is basically to store records of location, cable configurations and calibration data. This is only used to ensure consistent performance of their system; it’s not required for network operation or location.
Higher precision applications would also benefit from this type of augmentation in the same way that WAAS users achieve higher accuracies, except this system uses local beacons, and there could be the potential for even higher precision with known fixed beacon locations within urban environments. As commercial UAV applications grow, it’s not impossible that there will be higher precision flight applications within cities, for geo-location surveying, building and outside appliance inspections, signal mapping, traffic mapping, road-work repair monitoring — in fact, many of the monitoring activities we see daily in towns and cities where a view of the sky can be particularly restricted.
The CSRIC participants are not the only ones pursuing the holy grail of indoor location. As mentioned, seven different location vendors/technologies began the process to demonstrate their performance indoors through the common test bed, but only three completed the process. The others remain highly motivated and involved, however, and at work tuning their varied solutions. The WG3 report states, “The following location vendors showed initial interest in having their technologies tested and highlighted through the test bed process, but ended up not participating in the Stage 1 test bed, for a variety of reasons.
LEO Iridium Satellite-based Positioning (BoeingBTL).”
Meanwhile, promising indoor location research goes on at a number of commercial and academic institutions, such as the University of Calgary PLAN group, which has focused on integration of Wi-Fi and GPS. An upcoming paper reports that Wi-Fi, using the 802.11 standards, can be employed in several different ways as a complementary positioning technology for GPS/GNSS navigation, and the two can be used in an integrated framework to provide a continuous and robust positioning service.
Another promising component for indoor location could be the recent release of a software application by Baseband Technologies, which can provide rapid ephemeris for up to 28 days, between ephemeris downloads from GPS directly or over cellphones from the Internet. But indoor location warrants much more extensive treatment than these few random comments — what’s summarized here are only some recent developments in E-911.
There will likely be another round of E-911 test-bed activities if funding and management issues are resolved. See CSRIC WG-3 LBS Subgroup member Greg Turetzky’s “Expert Advice” column from GPS World for perspective and a forward look. We can anticipate even wider participation by differing technologies and even greater levels of performance in future. Longer term progression towards higher precision professional applications seems to be inevitable.
It used to be that professionals using precision GNSS applications had to go to the expense of buying, operating, and maintaining RTK base-stations and radio set-ups. Then L-Band corrections came on the scene and things changed. Most precision receiver manufacturers supply an L-band option for a nominal fee, and also sell PPP service subscriptions. There are now a number of PPP correction service providers offering higher precision, including a couple of new options.
As a quick overview — L-band is just like WAAS, but with privately owned assets, rather than provided by a state agency. WAAS focuses on high integrity and accuracy, while L-band corrections are largely more focused on providing accuracy to users. A geographically distributed ground network of base stations sends receiver data to one or more central processing facilities, which formulate wide area corrections. A number of uplink stations then send these corrections up to geostationary satellite transponders (time on a number of satellites is often rented, but L-band companies could also own and operate their own satellites), and the transponders transmit the wide area corrections at L-band frequency for reception by suitably configured user receivers. Users are able to buy subscriptions that enable them to receive corrections for a period of time — and that’s how the private L-band suppliers make money. The accuracy a user can achieve depends on the service, but anything from a few meters to a few centimeters is now possible.
Before WAAS was fully operation in the U.S., L-band corrections supplied by private companies were already available. It became possible to regularly get meter-level accuracies without base-stations, and it was clear that this could well turn into a major benefit for users. Operations like agricultural automation, asset tracking, mining, marine navigation, and others that could get by with a few meters of accuracy began to rely on L-band corrections. Geographic Information Systems (GIS) could even work without base stations, and vehicle tracking could determine which side of the road a truck was on. Then with expanding worldwide ground networks, more satellites and ever-improving clock and orbit algorithms, we started talking about corrections that gave us decimeter accuracies. That’s when PPP began to outpace WAAS for some applications requiring higher precision.
Never quite got the significance of why the original marine PPP companies were spinning off land-focused providers from their marine businesses, but the original marine correction providers now have successfully established “land-only” provider companies. It makes sense to have a supplier talk to you in marine terms if you’re running a shipping company, and for that provider to focus on providing higher integrity corrections to your shipping fleet. Land-based machine control, GIS and vehicle tracking outfits, on the other hand, want their own land-based support networks and don’t want to talk in marine terms. So we now have a number of providers supplying different sets of PPP corrections. It’s also possible that segment pricing for the different markets might have played a role in these spin-offs.
The granddaddy system would seem to be Fugro’s OminSTAR — whose services are now marketed by Trimble following acquisition of OminSTAR marketing rights by Trimble in 2011, while Fugro retained its marine services. OminSTAR HP, G2, XP and VBS services are available courtesy of a worldwide network of reference stations, data networks, carrier-phase measurements and sophisticated “clocks and orbits” correction algorithms which provide sub-meter thru 10-cm capability to users.
The OmniSTAR network.
And of course Trimble is also running its own RTX service alongside OmniSTAR. With a world-wide reference station network, and a number of concentrated regional networks, CenterPoint RTX is regularly achieving less than 4cm for users. RTX is available over regular L-band satellite and over internet. Overall an impressive PPP capability.
The CenterPoint RTX network, by Trimble.
Then NavCom — and Deere & Co, its parent company — fielded the StarFire system for both NavCom and John Deere customers, who not surprisingly use it mainly for agriculture. However, use of the system has grown since it was introduced in 1999 and currently around 10 percent of customers are in markets other than ag — in offshore, survey, construction, aerial, GIS, and government/military applications. The StarFire signal is available worldwide but NavCom offers two differently priced services: “Land Only” and “All Area” for non-ag applications. You have to have Navcom or John Deere equipment to be able to use it, but the network and the receivers come from the same people, so the system has been optimized for peak performance and there shouldn’t be concerns about third-party integrators or service providers.
In 2001 in collaboration with JPL, Real Time GIPSY (RTG) was combined with the existing StarFire clocks and orbits algorithms and a StarFire GPS 10-cm service was offered. Nowadays StarFire GNSS has evolved out of that original correction service and claims impressive 5-cm accuracies using its multi-constellation GPS and GLONASS corrections.
The Starfire GNSS network.
StarFire also uses over 80 reference stations with mostly GPS/GLONASS receivers providing carrier phase data for redundant processing and distribution by L-band transmissions over the Inmarsat satellite network.
Then we come to the latest entrant into the land PPP business – TERRASTAR. The parent company Veripos has been around since 1989 and has been extremely successful in its marine business, going public in 2012 on the Oslo stock exchange. Veripos recently launched TERRASTAR to better address the land market for all the same good reasons discussed earlier. TERRASTAR provides two correction services: –M is meter level DGNSS and –D is a decimeter solution using both GPS and GLONASS. All the 80+ owned and operated reference sites around the world have dual-frequency GPS/GLONASS receivers, and there are plans to add Galileo and even COMPASS in the future.
Dual-redundant processing and network servers ensure uninterrupted distribution of GPS and GLONASS orbit and clock corrections, enabling decimeter accuracy for users. TERRASTAR distributes corrections over all seven Inmarsat GEOs, providing most land users with redundant L-band visibility.
Correction quality and availability are largely dependent on the number of reference stations that track the same GNSS satellite. The figures below show the location of satellites at a given time and the number of stations simultaneously tracking those satellites. For the TERRASTAR ground network, there are often more than 30 stations tracking the same satellite. This makes for high-quality clock and orbit corrections, and TERRASTAR-D claims to provide consistent, stable horizontal 5-10 cm and vertical 10-15 cm performance.
The TERRASTAR network.
As a new player, TERRASTAR has yet to corner a whole bunch of customers, but it already has some significant customer applications. It “GEO-Gates” its corrections like other providers to ensure usage on land, but it extends coverage to land areas plus about 6 km beyond the coastline — termed “nearshore.” So TERRASTAR has been able to capture in-shore dredging and construction business in Europe that otherwise might have had to go to more expensive marine correction services.
In addition, a new customer is using TERRASTAR for airborne geophysical applications. There are also ongoing trials on excavators in road construction, on trains, in oil and gas, for GIS/surveying, and with integrated agricultural sprayer-control and harvesters. TERRASTAR plans shortly to offer a web-based e-Commerce System for users to control their subscriptions. TERRASTAR and Septentrio/Altus have long-term relationships for receivers/systems, and Septentrio and Altus also retail the TERRASTAR service.
So, just when you think you have a good picture of PPP, another option for users has started to show up. PPP over internet — or iPPP as Nexteq Navigation in Calgary, Canada terms their service – is designed to provide similar corrections as PPP, but over cellular phone or Wi-Fi connection to the internet, rather than over satellite. With single frequency GPS, Nexteq claims accuracies of around 50cm, and 10cm with dual frequency, although their T5 and T5A handhelds only currently support L1. Of course Trimble has had corrections over the internet for a number of years.
So its clear that PPP services continue to evolve and become more and more sophisticated to match the growing complexity of customer applications. And as achievable accuracies improve, we’re seeing use in higher precision applications which would have seemed impossible just a few years ago, where local RTK base-stations and radio links would have been the only way to go.
With several very capable sources to choose from, GNSS industry customers have several options to carefully assess and fit to their business. Each PPP supplier has specific advantages and features available to meet customer expectations. The market now appears to be large and specialized enough that its inviting for new entrants. And each new entrant seems to bring with them new twists and capabilities which sell their services. As a customer, it’s a good time to trial new precision applications with PPP.