Maxar Technologies shared via Twitter satellite imagery from the aftermath of the train derailment and explosion in East Palestine, Ohio. The train derailed on Feb. 3 and was carrying toxic materials.
The satellite images show the ongoing cleanup efforts following the derailment. The wrecked train can be clearly seen as well as blue storage containers being used to collect hazardous materials.
Hundreds of East Palestine residents had to evacuate their homes after a Norfolk Southern Railroad train carrying vinyl chloride derailed and exploded, emitting deadly fumes into the air and toxic material into the Ohio River.
A Feb. 8 press release from Ohio Governor Mike Dewine stated that it was safe for residents to safely return to their homes. “There will be ongoing air monitoring in the area, but for those who would like air quality readings to be conducted within their homes, Norfolk Southern Railroad has hired an independent contractor to work with local law enforcement, the U.S. EPA, and state officials to take air quality samples and provide results at no charge to residents,” it said.
New #satellite imagery from today, February 15, 2023, showing the aftermath of the recent freight train #derailment that occurred on February 3 in #EastPalestine, #Ohio. Imagery reveals an extensive cleanup operations in progress, and blue material storage containers nearby. pic.twitter.com/B1xvhM0ETJ
A unique workflow enabled by scanning robotic total stations is the simultaneous operation, with the same data controller and software, of a GNSS rover while scanning and imaging are being performed. Pictured: a Trimble SX12 and R12i GNSS. (Image: Gavin Schrock)
Scanning capabilities, in one form or another, have been added to models of robotic total station (RTS) since 2007 — for instance, on the Trimble VX. Such capabilities were limited to a pattern of individual shots, as the RTS would “nod.” While not designed to compete with traditional scanners, even such painfully slow “pseudo-scanning” capabilities demonstrate the value of new options for capturing detailed features.
It was not long before nearly all RTS offered limited (nodding scanning) capabilities, though at rates as slow as 15 shots per second. By 2013, the release of the Leica MS50 took the nodding scan to the next level, with a rate of up to 1,000 points per second, and then up to 30,000 in the subsequent MS60 model (which now also supports a tilting prism pole).
The end of 2016 saw the release of Trimble’s SX10 (and SX12 more recently). This routed the laser through a pair of rotating prisms to capture a swath of points as it nodded. In 2019, Topcon took the approach of adding a piggy-backed compact conventional scanner to the top of an RTS: the GTL-1000 and GTL-1200 models.
All these implementations were built upon high-quality RTS. Foremost, they can be operated as an RTS, with all the same integrated surveying capabilities as instruments with which surveyors were familiar, and in the same field software.
This includes all the integrated GNSS workflows: resections, combining optical and GNSS captured points in the same survey, and adding a rover to the prism pole for track-on-GNSS methods. One huge advantage of scanning total stations is instant deliverables already fully registered, as adopters of these new systems quickly realized.
Some initial users seemed skeptical of the relatively slow scan rates of these various models: 12 to 30 minutes for full-dome scans, and then a photo capture pass. Others, though, discovered that the time did not necessarily need to go to waste.
First, it is not necessary to do a full-dome scan and image pass every time; it is sufficient to pre-select specific areas to scan and image.
The real kicker is that while the RTS is scanning, it is possible to fire up the GNSS rover and capture points that the RTS cannot see, such as behind curbs, cars and vegetation. This is true especially now, with the advent of no-compensation tilt capabilities on nearly every new GNSS rover system.
This can be done in the same project, using the same software and field controller. This struck this writer as one of the coolest lateral features of scanning total stations when he first tried out an SX10 in 2017.
Considering the benefits scanning total stations deliver (especially with the integrated GNSS bonus), what has the reception been like among surveyors and other segments of the architecture, engineering and construction (AEC) community?
“As an industry, we’re getting better at tying solutions and workflow elements together, and not seeing them, or treating them, as individual functions or pieces of hardware,” said Derek Shanks, director of Geospatial Optical Product Management for Trimble. “We bring the system aspect, a case of using the best tool, using the strengths of each tool to their fullest.”
Accoring to multiple manufacturers, sales numbers indicate that the adoption of scanning total stations for AEC applications — and not just surveying — has exceeded expectations.
Douglas County Public Works needed a GNSS rover to support its UAS operations. The pay-as-you-go option was appealing as they only needed high-precision a few times per month. (Image: Jason Schilling)
High precision GNSS rovers play a vital role in a broad variety of field surveying and mapping applications. Different users have different value propositions in mind when choosing field hardware and software: expected precision, sources of corrections, configurations for specific workflows, and, of course, cost. Weighing these many considerations, GNSS manufacturers have come up with portfolios of multiple models to fill these varied needs.
That said, GNSS manufacturer Bad Elf took a different approach when it designed its flagship rover, the Bad Elf Flex. The Flex is designed to meet the cost-precision-workflow needs of everyone, from asset mappers to surveyors. (Hence the name “Flex.”) To inform the design of the Flex, Bad Elf listened to field users who wished for a scalable solution in a single rover, rather than having to buy multiple different models, and without breaking the bank.
Options for the Infrequent User
“I had one of the little Bad Elf GNSS surveyor handhelds for many years,” said Jason Schilling, wildlife biologist with Douglas County Public Utility District in central Washington State. “That worked great for rough mapping, between a foot and a meter of precision, and I could connect it via Bluetooth to mapping software on my mobile.”
But this all changed when Schilling began an unmanned aerial system (UAS) program for the utility several years ago.
“I really needed survey-level precision for ground control points to geolocate the images from the UAS,” said Schilling.
He was aware of the high cost of centimeter-precision-capable surveying rovers and it was too big of an investment, considering that he only did UAS mapping a few times a month. As an existing Bad Elf customer on the company mailing list, Schilling learned about the new Flex rover, which offered multiple options, and he found one that seemed quite enticing for the needs of his utility.
Schilling purchased a Flex Standard bundle at a low base price, about $3,000, with the pay-as-you-go plan for high precision. In the standard configuration, the Flex is capable of autonomous positioning (1–5 m), and mapping grade (sub-meter precisions) via free satellite-based augmentation services (SBAS), such as WAAS. But when the user activates a pre-purchased “token,” the full centimeter-precision capability, using external corrections, is enabled.
“On the day of a UAS survey, we turn it on, activate a token from our account, and then we have 24 hours of high precision,” Schilling said. “It costs us $25 per day.”
For two to three UAS surveys a month, this works out to far less over many years than the cost of buying a typical surveying rover.
Correction Sources
For real-time kinematic (RTK) corrections, Schilling connects via NTRIP to the statewide cooperative real-time network (RTN); sometimes in a network RTK mode (such as VRS) or single-base RTK to a nearby reference station on the same network. The Flex accommodates NTRIP connections to RTN or IP-enabled reference stations, but Bad Elf has added even more flexibility for corrections.
In some scenarios there is no access to an RTN or no cell service (needed for NTRIP access). One option in these cases is to add a second Flex, set it up as an RTK base, and connect the base and rover via radios that Bad Elf offers.
Bad Elf has added other options for corrections: the Bad Elf RTK service taps into a nationwide real-time network operated by Point One Navigation. This is accessible via NTRIP in the same manner as regional, state or local RTN, and is offered for a monthly fee. In addition, for situations where there is no RTN or cell service, a global precise point positioning (PPP) service (Atlas) can be enabled on the Flex.
PPP differs from RTK/RTN in that it does not need the dense arrays of reference stations, or cell service to access. Instead, PPP derives very precise clock and orbit data from a global array of tracking stations and delivers this to the Flex via geostationary satellites. After a short convergence time, PPP from the Atlas service will yield 5 –10 cm precision over most of the globe.
The Full Boat
Full Configuration. Brian Cortese works for the City of Ellensburg, where he uses the FLEX Extreme Bundle for multiple field applications. (Image: Brian Cortese)
The City of Ellensburg, a college town and farming community in central Washington State, chose the Flex Extreme bundle for about $6,000 — the “full boat” configuration. The Extreme bundle enables all the add-on services all the time, eliminating the need for tokens. In their case, the frequency of use made the higher initial investment worthwhile.
“We have big plans for our rovers,” said Brian Cortese, Engineering Tech/Inspector for the City of Ellensburg Public Works & Utilities.
Ellensburg is a vibrant town that is attracting a lot of new development and it is being proactive in surveying and mapping assets as they are added or replaced.
“We’re recording manholes and valves, sewer systems, storm water systems, irrigation, hydrants — everything that gets built in the city gets as-built surveyed,” Cortese said. “Precise, real-time positioning, it’s been a benefit to us already. We can go out before they work on the subgrade for new developments and take measurements, and then when they finish the subgrade and pave it, we can go back and locate those exact positions.”
Ellensburg uses corrections from the statewide cooperative RTN. In fact, one of the RTN reference stations —also part of the NOAA National CORS Network — is right in the center of town atop the science building of Central Washington University. While the city does a wide variety of surveying and mapping, with the Flex and RTN corrections surveyors get the same centimeter-precision for everything they measure in the field.
“We’ve done design projects with it,” Cortese said. “For instance, we recently took measurements in an area of downtown for a proposal by recording positions and elevations to develop a new park and entertainment area for the community. We are also marking Americans with Disabilities Act (ADA) ramps to meet federal specs out in the field — it’s been really handy for so many things.”
Survey-Grade Rover
To serve the full range of precision needs, the Flex had to be designed as a survey-grade rover. It has a full-constellation GNSS and RTK engine: GPS, GLONASS, Galileo, BeiDou, and support for other regional constellations. With more satellites in view, it can perform in sky-view-challenged locations, such as around buildings and under tree canopy.
“Ellensburg is on the Tree City, USA list; our streets are very well lined with a variety of trees, which is also where a lot of our utilities are and development is going on,” Cortese said. “We have been able to get good precisions in and around those trees. Actually, someone on our staff is taking an inventory of the trees with the Flex and loading the data directly into ArcGIS.”
Even in the more rural areas of Grant County that enjoy a lot of open sky, Schilling said, some areas planned for mapping are along upper tributaries and in the hills with a lot of tree coverage. He said the Flex has performed well in those areas.
Choices
The Flex offers these options and combinations:
Flex Extreme. Full survey-grade rover that can use a variety of correction types.
Base-Rover RTK. Two Flex Extreme units connected via radio.
External RTN/RTK corrections via NTRIP.
Bad Elf RTK Service. Single-tap access to a nationwide RTK corrections service.
PPP service. Atlas PPP corrections via L-band geostationary satellites.
Flex Standard. Pay-as-you-go high-precision-enabled service using tokens.
Static Logging. Observation file logging for post-processing (supported by Flex Extreme).
Compatibility with multiple field-mapping software applications.
While many modern GNSS rover systems support one or more options similar to those listed above, Bad Elf’s Flex supports all of them, making it capable of a wide variety of applications.
The danger of hitting a buried water or gas pipe when digging for a construction project persists despite many efforts to reduce it, such as “call before you dig” phone numbers. For example, in Minnesota there were 4,000 such hits in 2019. That is one reason why it is very important to map “as built” underground utilities accurately. This must be done quickly and efficiently, before trenches are filled and without slowing progress of the project.
Traditionally, crews have mapped the underground pipes and cables on paper. In turn, when a construction project needs to know the location of underground utilities before digging, it typically relies on someone who consults those paper maps, uses an electromagnetic utility locating tool, and marks the ground with spray paint. The construction crew then must correctly interpret those marks on the ground. In 2019, Minnesota-based utility consultancy Ellingson Companies was asked to develop a new and more efficient process.
Capturing Data in Real Time
By leveraging solutions from Esri and from Canadian hardware and software manufacturer Eos Positioning Systems, Ellingson Companies GIS Manager Damon Nelton developed a solution that allows his team to capture new pipe construction in real time. By streamlining documentation workflows, the new process improved field productivity and allowed Ellingson Companies to produce digital as-builts that meet the needs of its gas utility clients and improve the safety of future construction projects.
While construction crews have been putting pipe in the ground for generations, today they are expected to produce a digital record of their work in real time — for the sake of safety and efficiency.
Using Esri’s Utility Pipeline Data Model, Nelton created a system that enables crews to map their as-built pipe projects while also tracking components. The system improves data integrity — in other words, reduces human error — by relying on scannable 16-digit alphanumeric bar codes developed by the American Society for Testing and Materials that provide seven attributes for each conduit, including thickness, diameter, lot number and manufacturer date. To collect and store these data, Nelton set up an ArcGIS Enterprise geodatabase.
Gas meters, which also need to be mapped, are often in locations that are hard to map directly with a GNSS receiver because line-of-sight to the satellites is obstructed by trees, roof eves, or adjacent buildings. Therefore, they must be shot with an offset. For these situations, Nelton used Eos Positioning Systems’ laser mapping solution, which enables surveyors to use lasers attached to their range poles to feed data directly into their GIS.
No More Battleship
Using Eos Positioning System’s Arrow Gold receiver and the MNCoors RTK network, Nelton said, his team was able to average an accuracy of 0.25 throughout a project in the city of Owatonna, Minnesota, as confirmed by spot checks with other survey equipment and with the city’s survey team.
“Not every shot was easy, and some took multiple attempts and tricks of the trade to get them,” Nelton pointed out.
On projects in the middle of mountains, where real-time kinematic (RTK) networks do not exist, the company has used the Atlas Service, averaging accuracies of 12 in.
“Given the circumstances of these projects,” Nelton said, “we still consider that to be great.”
Using the new system, foremen use a survey in ArcGIS Survey123 to input their inspection notes and other information, feeding it all from the field to the office and into layers shared between divisions. This way, the data are available in real time, not at the end of the project.
For customers who still want a piece of paper to file in a physical folder in a filing cabinet, Nelton creates a Microsoft Word document template in their format, populates it using dynamic text with syntax in ArcGIS Pro, inserts a map, then saves the Word document as a PDF.
“At the end of the project, we got almost 17,000 digits with no human entry other than pressing the button on the barcode scanner, which means zero data errors,” said Nelton.
No pieces of paper with critical data on the underground utilities languish in a glove compartment or are eaten by a surveyor’s dog, and all the data is available in real time.
Additionally, the combination of the barcode scanning workflow and the high accuracy GNSS receiver enables Nelton’s team to locate gas asset pieces that need to be replaced — for example, due to a recall by the manufacturer — “without playing battleship,” he said.
GeoCue has released the TrueView 535 imaging system for UAVs, and the TrueView 720, its fourth-generation Riegl integration. It also launched its LP360 software add-on called 3D Accuracy and the Accuracy Star hardware.
TrueView 535 is built on TrueView 515’s technology and consists of updated lidar sensors, adding a third return, increasing mapping abilities below canopy. An additional third nadir camera offers another point-of-view and improves photogrammetry quality. It also includes a longer, usable lidar range to increase flexibility.
TrueView 535. (Image: GeoCue)
TrueView 720 is a fourth-generation Riegl VUX-120 with three laser beam orientations. It provides high point-density corridor mapping. Using the Riegl VUX-120 with three laser beam orientations (nadir, +10-degrees forward and –10-degrees backward) and three oblique/nadir cameras enables data collection from more surfaces in one flight path.
Trueview 720. (Image: GeoCue)
One application of TrueView 720 is scanning power lines. Users can capture the poles vertically, front and back. The extreme range of this system means it can be integrated with UAVs, airplanes or helicopters.
In addition to the two sensor payloads, GeoCue has launched its LP360 software add-on for processing and visualization — the 3D Accuracy and the Accuracy Star hardware.
Accuracy Star. (Image: GeoCue)
“When used together, Accuracy Star and the 3D Accuracy add-on provide automated horizontal and vertical checks,” said Darrick Wagg, vice president of customer success for GeoCue. “You can automatically find a 3D target on a drone dataset. The software will calculate the correction for any 3D target and provide a seamless workflow to apply the correction on the point cloud.”
These products are suitable for geospatial professionals.
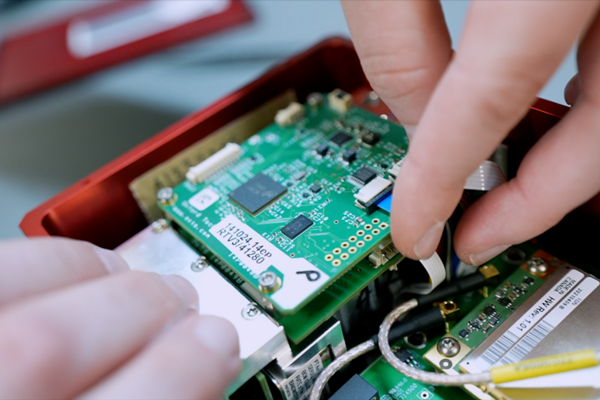
Hexagon’s Safety, Infrastructure & Geospatial division has released for Android defense applications. The platform is designed for the development of mobile applications for dismounted soldiers in the field.
With LuciadCPillar, developers can build applications with 2D and 3D views. It features military symbology and supports many geospatial data types including vector data, raster data, elevation data, point clouds and 3D meshes. It has the same capabilities found in desktops, in-vehicle and browser applications built with LuciadLightspeed, LuciadCPillar and LuciadRIA.
The platform offers capabilities to match high-resolution screens, graphic processing units and multi-core processors including the ability to display 3D data in mobile applications. LuciadCPillar supports ARM processors and an application programming interface, which aligns with the Android developer experience.
Impact, a French system integrator, partnered with Hexagon to test LuciadCPillar and will integrate it into its Delta Suite product, which is used by the French Special Operations Command.
LuciadCPillar is part of Luciad 2022.1, which is available now globally.
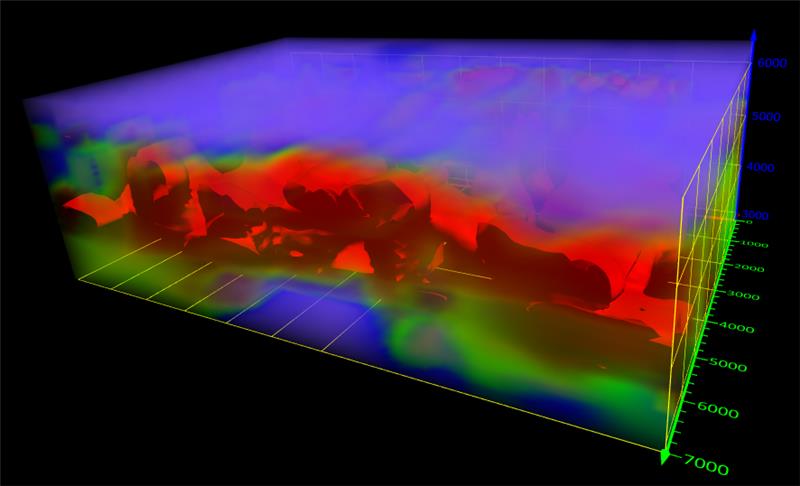
Golden Software’s Surfer package, designed for 3D surface mapping, now provides robust subsurface visualization and modeling functionality by incorporating many true 3D gridding and visualization tools.
With the enhanced functionality, users can now model an additional variable, a C variable, such as a contaminant or chemical concentration, along with the traditional X, Y, Z values. Surfer also includes the ability to create a 2D map of a slice-through 3D grid, which users can move up and down through the grid, illustrating how the C value changes with depth.
Part of Surfer’s enhancements is isosurface creation, enabling visualization of the 3D grid in the 3D view as an isosurface, providing another way to see how C data varies with depth or elevation. The new 3D-rendered volume functionality also allows users to visualize the 3D grid in the 3D view as a solid body by assigning colors to different C values, highlighting variations in the data.
Golden Software has released a beta version of Surfer simultaneously with the new version to give users a trial of the new features while they are still in development.
The company states that the software is suitable for geologists, geophysicists, hydrologists and environmental engineers.
The Linux Foundation has launched the Overture Maps Foundation, interoperable open map data for developers who build map services or use geospatial data and to strengthen mapping services globally. Overture expects to release its first datasets in the first half of this year.
Overture aims to deliver services including collaborative map building by incorporating data from Overture members, civic organizations, and open data sources, creating a global entity reference system, quality assurance processes to detect map errors and ensure map data can be used in production systems, and a structured data schema to create an ecosystem of map data. Additionally, map data is open and extensible to users under an open data license.
Founded by Amazon, Meta, Microsoft and TomTom to help developers source and curate up to date map data, Overture will integrate with existing open map data from projects such as OpenStreetMap and city planning departments, as well as with new map data contributed by members, to create a living digital record of the physical world using artificial intelligence and machine leaning techniques.
The initial release of datasets will include basic layers including buildings, roads and administrative information with plans to improve coverage, resolution and accuracy of existing data over time. It also will introduce new layers including places, routing and 3D building data.
Mobile mapping is helping accelerate the progression of some of the most difficult engineering challenges on the planet, including those around autonomous driving and advanced surveying techniques, such as lidar.
The complexity of those challenges means that the outputs from a mobile mapping inertial navigation system (INS) must be as accurate as possible. A high-performing INS will make the most of any available GNSS signals, with the aim of providing centimeter-level accuracy even in areas where GNSS performs poorly, for instance in urban canyons. It also offers important data on pitch, roll and heading, which maintains the integrity of survey data even as the vehicle moves across large areas.
With such a wide variety of INS devices on the market, it can be difficult to narrow down the best option. It is important to establish criteria that will aid in evaluating the different INS propositions out there for mobile mapping projects.
Image: OxTS
1) How tightly integrated are the inertial measurement unit (IMU) and GNSS data?
INS is an essential element in providing accurate location data in as many environments as possible. Therefore, it is important to know how effectively the data from the IMU supports the GNSS data. In technical terms, this means evaluating whether the sensors are tightly integrated at all, and if so, how well.
The reason GNSS struggles in urban canyons and under tree canopies is that it is unable to get the six satellite signals necessary for a real-time kinematic (RTK) lock. In this situation, the GNSS will give readings that may be incorrect, as it is essentially trying to solve an equation without having all the numbers.
A tightly integrated GNSS and INS data stream will select the most reliable signals and use those to determine the position of the vehicle. If the data streams are not tightly integrated, then the INS’ ability to counteract GNSS issues is limited. Without accurate positioning, data scans will lose accuracy and even become completely incoherent the longer the user scans — making them unreliable at best, and unusable at worst.
2) Trading off accuracy and cost
Although accuracy is vital in mobile mapping, some INS devices will provide data that is far more accurate than the given job requires. Because greater accuracy equals greater cost, users may be paying more than necessary.
With that being said, the scale of accuracy and cost is not linear. An INS half the price of the most expensive one on the market will not be half as accurate. Look at each offering carefully to see what it includes and decide what level of accuracy and features are vital to the task. Eliminating unnecessary levels of precision or additional software features that are not needed is an effective way to make some savings.
3) How rugged is the device?
Mobile mapping vehicles will likely be out in the dry, wet, hot, cold, mud and snow. These vehicles will almost certainly be used consistently for long periods of time. Thus, it is essential to know that none of these conditions will stop the INS from working at peak effectiveness. Look for the IP rating (IP65 is essential for being weatherproof and protecting against shocks and dust) and ask what the average lifespan of the product is.
Image: OxTS
4) Can the device be properly calibrated?
Any INS is only as good as its calibration. Without calibration, the sensors in any INS can become misaligned and therefore provide inaccurate readings. Talk to vendors about their calibration processes — do they work to a nationally recognized standard of calibration like ISO 17025? Do their calibrations account for variations in temperature or humidity?
It is also worth considering how often sensors need recalibration. Recalibration is a chargeable service from most vendors, meaning the more the device needs recalibrating, the more the user will have to pay. This could also lead to delays if the user must send units abroad to have them recalibrated.
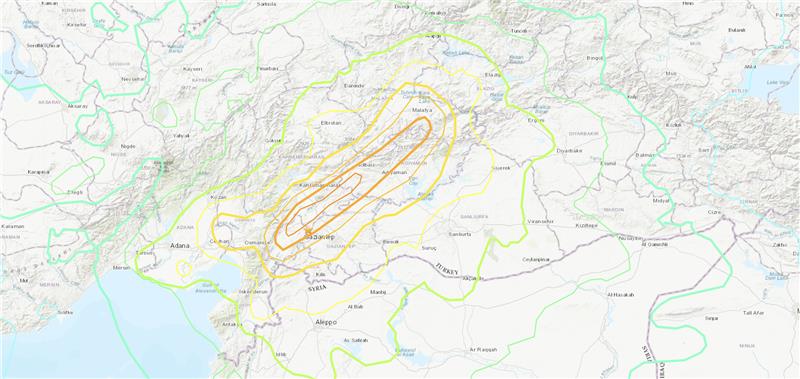
On Feb. 6, the United Nations Satellite Center (UNOSAT) announced via Twitter that it had activated emergency mapping services of Turkiye and northern Syria after the magnitude 7.8 earthquake hit earlier that day. The satellite images provide an overview of the damage, which can be used for humanitarian efforts and disaster relief, reported Space.com.
UNOSAT provides emergency mapping services, upon request, to provide satellite imagery analysis during emergencies and disasters. The maps show infrastructure that has been damaged during an emergency, which can then be used to provide relief by disaster response groups.
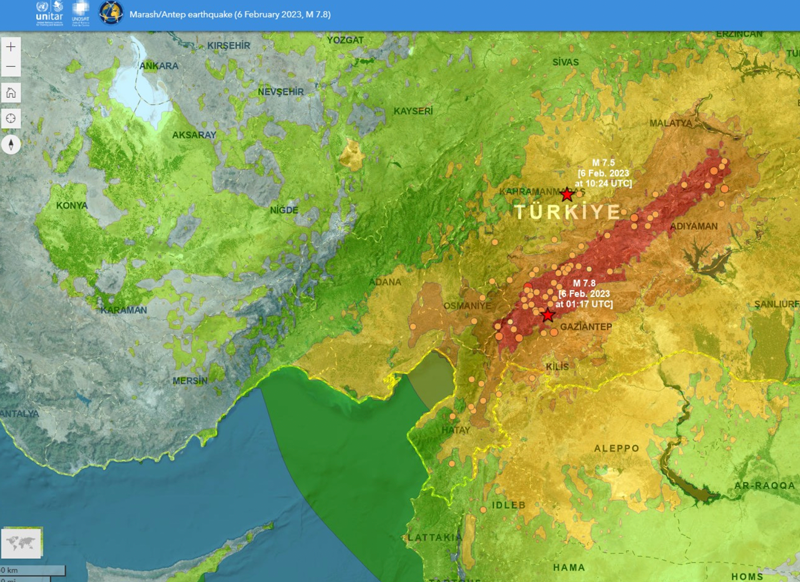
The impact of the earthquakes was significant and ranks in the red for economic losses and orange for fatalities, according to the U.S. Geological Survey (USGS). (Image: UNOSAT)
The earthquake caused massive destruction throughout Turkiye and Northern Syria, causing an estimated death toll of more than 19,000 as of Feb. 9. Several historical structures dating back thousands of years have also been severely damaged.
UNOSAT started in 2001 and is hosted by the European Organization for Nuclear Research. It does not operate its own satellites, but coordinates with United Nations member states to gather imagery from government agencies and privately owned satellites. United Nations offices, government agencies and relief organizations can request access to imagery collected by UNOSAT.
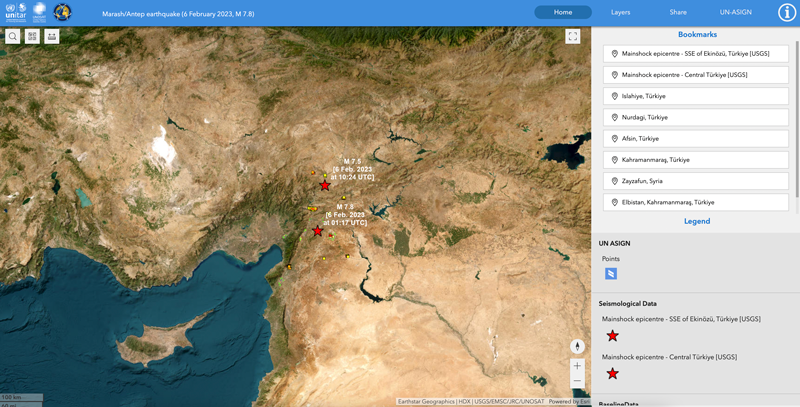
The USGS reports the earthquake resulted from strike-slip faulting at shallow depths. It appears to be associated with either the East Anatolia fault zone or the Dead Sea transform fault zone. (Image: UNOSAT)
All maps of Turkey and northern Syria from UNOSAT can be found here. A live interactive map can be found here.
Three earthquakes of magnitude 6 or larger have occurred in Turkiye and northern Syria since 1970. The largest was a magnitude 6.7 earthquake in January 2020. (Credit: USGS)
On Feb. 6, a magnitude 7.8 earthquake struck Turkiye and northern Syria collapsing buildings and killing more than 2,000 people, followed by magnitude 6.7 aftershocks. The impact of the earthquakes was significant and ranks in the red for economic losses and orange for fatalities, according to the United States Geological Survey (USGS).
The USGS reports the earthquake resulted from strike-slip faulting at shallow depths. It appears to be associated with either the East Anatolia fault zone or the Dead Sea transform fault zone.
Historical buildings throughout Turkey have been severely damaged, including the Yeni Mosque and the Gaziantep Castle, which date back thousands of years.
War-torn Syria — specifically Aleppo, Hama and Latakia — have also sustained severe damage to infrastructure that was already fragile.
The effects of this earthquake were felt as far as Lebanon and Israel.
Parts of the historic Gaziantep Castle collapsed, as it lies close to epicenter of the magnitude 7.8 earthquake. (Image: JudyDillon/ iStock / Getty Images Plus/Getty Images)
Historical Gaziantep Castle’s east, south and southeast bastions collapse, leaving debris scattered on the road after major 7.4-magnitude earthquake struck Türkiye’s southeasthttps://t.co/5j2soYI6hCpic.twitter.com/1n6whCr2gY
The Open Geospatial Consortium (OGC) has formed the Geo for Metaverse Domain Working Group (DWG), which will serve as a forum for the collective geospatial expertise of the OGC community to gather to help build and expand the open Metaverse. The group is open to both OGC members and non-members.
The group plans to contribute its expertise in 3D, modeling and simulation, artificial intelligence, digital twins, streaming, augmented and virtual realities, routing, mapping and more — all at scale.
The group will work on pieces of the Metaverse that pertain to geospatial applications and standards by identifying standardization activities and best practices based on FAIR (making data Findable, Accessible, Interoperable and Reusable) data principles.
The DWG will be the primary point of contact with the Metaverse Standards Forum, of which OGC is a founding and principal member.
3D geospatially anchored data is powering innovation across a range of industries. This same data — relied upon for construction of the real world — is now driving the creation of virtual/digital worlds that will form parts of the Metaverse.