CHC Navigation (CHCNAV) has released the AU20 MMS, a vehicle-mounted mobile mapping system designed for accurate and efficient collection of 3D spatial data. The system combines high-performance lidar technology, versatile sensor support and intelligent data processing to provide a practical and flexible solution for professionals in road surveying, asset management and infrastructure documentation.
The AU20 MMS features a sophisticated lidar system that uses fourth-generation real-time waveform processing technology. It achieves a scan rate of 2 million points per second and 200 revolutions per second, producing point cloud data with 5 mm accuracy and 3 mm precision. This level of detail allows for the identification of fine surface characteristics and features, supporting comprehensive asset inventories and condition assessments. The system’s long-range, multi-cycle laser technology enables high-density data capture up to 250 m in vehicle-mounted applications.
Built on the adaptable AP7 vehicle platform, the AU20 MMS supports a dual laser scanner setup to increase data density. The platform includes a 45° scanning angle to reduce data shadows and improve detection of vertical structures and road signage. The AP7’s built-in processor allows integration of up to eight external sensors, including specialized pavement detection cameras and panoramic cameras such as the Ladybug5+ and Ladybug6, giving users flexibility in data acquisition strategies.
The AU20 MMS uses artificial intelligence-based algorithms to refine data quality and streamline processing. AI-driven vehicle motion trajectory adjustment automatically identifies control points, correcting point cloud inaccuracies to within two centimeters to meet highway-grade survey requirements. AI-powered panoramic coloring achieves more than 95 percent accuracy in recognizing and handling vehicles and pedestrians, resulting in clean, interference-minimized colorized point clouds with efficient one-click optimization.
CHCNAV’s software suite, CoPre and CoProcess, streamlines workflows through intelligent automation. CoPre optimizes data preprocessing, allowing real-time adjustments to point clouds and imagery while minimizing manual intervention. CoProcess uses AI algorithms for feature extraction, including road assets, terrain models and building structures, to accelerate project delivery.
Exyn has integrated the Trimble DA2 GNSS System, an RTK-capable GNSS receiver, with the Exyn Nexys autonomous mapping platform, bringing centimeter-level geospatial accuracy to SLAM-based mobile 3D mapping.
The new capability enables users to pair Exyn Nexys’ lidar-based SLAM mapping with high-precision RTK corrections, allowing teams to georeference and anchor point clouds directly in the field without relying on ground control points or post-processing workflows. The result is faster, safer, and more accurate decision-making for industries including mining, construction and critical infrastructure inspection. Intelligently combining RTK and SLAM delivers highly accurate and robust point clouds — even in challenging environments.
When paired with the real-time colorization, users gain an added layer of visual context, enabling photorealistic mapping and the extraction of immersive georeferenced 360° imagery for enhanced situational awareness and analysis.
deliver real-time, centimeter-accurate global positioning
seamlessly integrate underground and surface-level scans into unified, georeferenced datasets
accelerate project timelines by reducing dependency on traditional ground control setups
improve accuracy and alignment for as-builting, volumetric measurements, construction progress tracking / QA, and mine planning.
This enhancement is particularly useful for hybrid environments where teams operate in both GPS-available and GPS-denied zones. The Nexys with DA-2 enabled RTK allows for seamless transitions between these areas while maintaining global coordinate consistency, so Exyn Nexys can serve as a true end-to-end solution for autonomous 3D data capture.
The Trimble DA2 GNSS and Exyn Nexys integration kit is available immediately for plug-and-play compatibility.
Leica Geosystems, part of Hexagon, has released an addition to its Leica Pegasus TRK portfolio of mobile mapping solutions, the Leica Pegasus TRK100. The mobile mapping system is a geospatial solution built for large-scale infrastructure measurement and digital twin creation.
The Pegasus TRK100 is small and light, making it easy to mount on any vehicle. The mobile mapping system features the same modular hardware approach that enables users to add more cameras to expand the range of use cases.
Image: Leica Geosystems
With its advanced mapping capabilities, the Pegasus TRK100 enables GIS professionals to visualize and understand the location of assets to help make the right decisions, improve asset management, and support infrastructure building and maintenance. The Pegasus TRK100 combines artificial intelligence and a learning algorithm to enhance and optimize the clarity of points in post-processing for improved accuracy.
The versatility of the Pegasus TRK100 suits a variety of applications in diverse industries, including telecommunications, utilities and road maintenance.
“The Leica Pegasus TRK100 advances autonomy and artificial intelligence in mobile mapping, removing manual process steps and providing actionable insights for informed decision,” Christian Schäfer, business director mobile mapping at Leica Geosystems, said. “It empowers GIS professionals to create the maps they need, collect the information they require, and visualize the data in a way that immediately aids understanding.”
AllTerra, a Trimble geospatial dealer, has joined the GeoCue distribution network. AllTerra will provide GeoCue’s full line of TrueView 3D imaging sensors, a UAV, lidar and photogrammetry solution. The technology enables fast, automated generation of true 3D colorized point clouds, oblique imagery and orthophotos from a single UAV flight.
AllTerra is also authorized to sell LP360 lidar and photogrammetry 3D point cloud software. LP360, an advanced desktop lidar software package, simplifies extracting information and generating deliverables in a GIS environment.
The company offers Trimble and Spectra Precision solutions in surveying, MGIS, marine, forensics, mobile mapping and infrastructure. Alltera also offers mobile/airborne lidar and photogrammetry solutions from GeoCue and Microdrones.
Mobile mapping is helping accelerate the progression of some of the most difficult engineering challenges on the planet, including those around autonomous driving and advanced surveying techniques, such as lidar.
The complexity of those challenges means that the outputs from a mobile mapping inertial navigation system (INS) must be as accurate as possible. A high-performing INS will make the most of any available GNSS signals, with the aim of providing centimeter-level accuracy even in areas where GNSS performs poorly, for instance in urban canyons. It also offers important data on pitch, roll and heading, which maintains the integrity of survey data even as the vehicle moves across large areas.
With such a wide variety of INS devices on the market, it can be difficult to narrow down the best option. It is important to establish criteria that will aid in evaluating the different INS propositions out there for mobile mapping projects.
Image: OxTS
1) How tightly integrated are the inertial measurement unit (IMU) and GNSS data?
INS is an essential element in providing accurate location data in as many environments as possible. Therefore, it is important to know how effectively the data from the IMU supports the GNSS data. In technical terms, this means evaluating whether the sensors are tightly integrated at all, and if so, how well.
The reason GNSS struggles in urban canyons and under tree canopies is that it is unable to get the six satellite signals necessary for a real-time kinematic (RTK) lock. In this situation, the GNSS will give readings that may be incorrect, as it is essentially trying to solve an equation without having all the numbers.
A tightly integrated GNSS and INS data stream will select the most reliable signals and use those to determine the position of the vehicle. If the data streams are not tightly integrated, then the INS’ ability to counteract GNSS issues is limited. Without accurate positioning, data scans will lose accuracy and even become completely incoherent the longer the user scans — making them unreliable at best, and unusable at worst.
2) Trading off accuracy and cost
Although accuracy is vital in mobile mapping, some INS devices will provide data that is far more accurate than the given job requires. Because greater accuracy equals greater cost, users may be paying more than necessary.
With that being said, the scale of accuracy and cost is not linear. An INS half the price of the most expensive one on the market will not be half as accurate. Look at each offering carefully to see what it includes and decide what level of accuracy and features are vital to the task. Eliminating unnecessary levels of precision or additional software features that are not needed is an effective way to make some savings.
3) How rugged is the device?
Mobile mapping vehicles will likely be out in the dry, wet, hot, cold, mud and snow. These vehicles will almost certainly be used consistently for long periods of time. Thus, it is essential to know that none of these conditions will stop the INS from working at peak effectiveness. Look for the IP rating (IP65 is essential for being weatherproof and protecting against shocks and dust) and ask what the average lifespan of the product is.
Image: OxTS
4) Can the device be properly calibrated?
Any INS is only as good as its calibration. Without calibration, the sensors in any INS can become misaligned and therefore provide inaccurate readings. Talk to vendors about their calibration processes — do they work to a nationally recognized standard of calibration like ISO 17025? Do their calibrations account for variations in temperature or humidity?
It is also worth considering how often sensors need recalibration. Recalibration is a chargeable service from most vendors, meaning the more the device needs recalibrating, the more the user will have to pay. This could also lead to delays if the user must send units abroad to have them recalibrated.
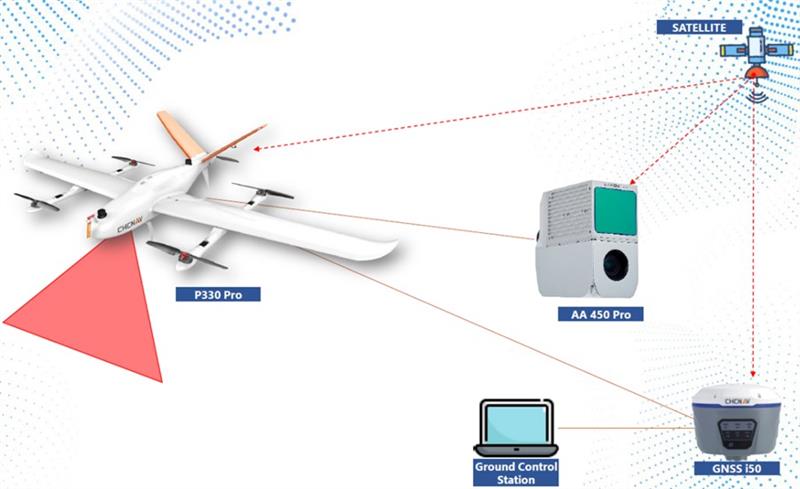
CHC Navigation’s mobile mapping solutions, the P330 Pro vertical take-off and landing unmanned autonomous vehicle (VTOL UAV) and the AlphaAir 450 lidar, are being used for mining exploration in Indonesia. The solutions help with effective data collection to measure the volume of an open-pit mine.
The P330 Pro UAV and the AlphaAir 450 provide an effective surveying solution, which is critical to the life cycle of mining projects. During this operation, the solutions covered more than 5 km² per mission, with an error of less than 5 cm. Accurate lidar in vegetated areas enabled surveying of the ground surface, including structures missed by other surveys due to dense vegetation.
A CHC Navigation i50 GNSS receiver and processing software provided with the AlphaAir 450 were deployed during the operation.
The P330 Pro UAV enables small- and large-scale aerial surveying. It comes with a portable ground control station for remote control and communication between the UAV and its operator. The UAV is designed for vertical takeoff and landing, making it convenient to operate and transport.
The AlphaAir 450 is a lightweight and rugged system, which integrates lidar with an industrial-grade professional 26 MP camera and an inertial navigation system for data collection.
Tactical-grade IMUs enable UAVs to achieve the same locational accuracy as ground-based systems. (Photo: CHC Navigation)
We often hear the anecdote about an early lidar scanner that could take a shot every few seconds, yet it held a value proposition for certain applications. As the capabilities of successive mapping and surveying systems change rapidly, so does the conventional wisdom about which are best for various applications. Transportation corridor mapping — be it for improvements design, as-built surveys, asset management or digital twinning — has always been a balancing act between precision and efficient large-scale data capture.
“I remember 15 years ago, during my university time, the scanner was the size of a dining table,” said Andrei Gorb, segment manager for mobile mapping and unmanned aerial vehicle (UAV) systems, CHCNAV. At the top end of the mapping food chain were terrestrial scanners, targets, bore sighting, and registering point clouds mostly manually. As cumbersome and time-consuming as the legacy tools and methods were, these options still offered efficiency gains compared to conventional surveying with total stations. Then a decade ago, mobile-mapping systems began to change that paradigm. Departments of transportation found that mobile-mapping systems could meet their requirements for many design projects, and certainly for asset inventory and management. Unmanned aircraft systems (UAS) were not quite there yet.
The tech used depended on the application. “First, there was road maintenance, to understand the road condition,” Gorb said. “Previously, UAS did not meet the high requirements: centimeter in absolute and millimeter in relative. We now have mobile-mapping solutions, from us and other suppliers, that can be in the 8-9 mm absolute accuracy range on short road surfaces.” Yet for many transportation applications, the absolute accuracy may not be as important as the relative precision. This is where years of development in UAS has made the difference.
CHCNAV was not alone in recognizing that the gap was closing, and the company planned ahead. “Previously, UAS would fly for under an hour, and were mostly carrying cameras or early lidar, which was not suitable for highways,” Gorb said. “A few years of development, and we see it is practical to meet requirements with UAS flying between 50 and 100 meters — in Europe, many local regulations forbid flying above 120 meters anyhow.” Gorb attributes the advances to lidar sensors that UAS can carry. These sensors have become much better and less expensive. Plus, platforms like vertical-take-off-and-landing (VTOL) systems can stay in the air much longer.
The UAS boom of the past 10 years saw the dominance of consumer-prosumer market UAV platforms becoming quite commoditized, with certain vendors gaining majority market share. CHCNAV, instead, sought to develop enterprise solutions, for both mobile and UAS systems — large-platform rotor, fixed-wing and VTOL platforms. The company offers an amalgam of hardware and software, from Riegl scanner heads on some of their mobile-mapping systems to Honeywell inertial navigation systems (INS) for some of their UAS solutions.
Gorb echoes what we hear from many mapping practitioners, saying ground-control points are not as necessary in the densities required for legacy mobile and UAS mapping. He explained that everything from strip adjustments to processing of GNNS/IMU data has tightened both precision and accuracy. “We have a tactical-grade IMU in both our mobile mapping and UAS solutions, for a high-end trajectory,” Gorb said. “So, it means that we can get the same high-accuracy point cloud for highways from the ground and the air perspectives.”
Mosaic, a geospatial imaging company, announced that its new Mosaic X high-resolution, spherical camera is now compatible with RIEGL’s mobile mapping systems.
The development of the Mosaic X focused on delivering a high-resolution, global-shutter, 360-degree camera with precise GNSS time stamping to achieve extreme visual clarity and accuracy at once. These qualities fit the requirements to be integrated with mobile laser scanning systems such as the RIEGL VMX, VMQ and VMY series.
Mobile mapping has uses across many industries and sectors, including private and public organizations. The two most consistent demands when mapping infrastructures are high-resolution, photo-realistic imagery and highly accurate data. Cameras such as the Mosaic 51 and Mosaic X capture road infrastructure with photo-realistic accuracy, which is more understandable to the human eye than a point cloud from a laser scanner.
“The pairing between 360-degree imaging systems and mobile laser scanning systems results in high precision LiDAR-based point clouds, colorized by photo-realistic images,” says Mosaic co-founder and VP of engineering, Rostislav Lisovy. “This outcome will then have the benefit of both a precise point cloud and panoramic images – for precise measurements and evaluation of textures.”
The push for sensor integration came from the customers, Mosaic CEO and co-founder Jeffrey Martin states. “We have had many requests from our customers who are looking to use RIEGL and Mosaic products in unison. The Mosaic X impresses with high-resolution panorama images and offers precisely time-stamped single-lens imagery for the purpose of point cloud coloring as well as the generation of undistorted, geo-referenced high-resolution imagery with 12 [megapixels] per lens.”
Founded in 2012, GeoSLAM is a provider of mobile scanning solutions with proprietary high-productivity simultaneous localization and mapping (SLAM) software to create 3D models for use in digital twin applications.
The addition of GeoSLAM is expected to significantly expand and accelerate Faro’s market growth in the mobile scanning space.
“We are thrilled to add GeoSLAM’s handheld 3D scanning technology to our portfolio of cutting-edge data capture solutions,” said Michael Burger, Faro president and CEO. “Faro now offers the industry’s broadest set of 4D data-capture solutions, including 360° camera-based images, mobile scanning and stationary high-accuracy laser scanning, allowing customers to balance the need for accuracy, speed and detail depending on their requirements. These capture technologies provide the foundation for our 4D digital-reality-based SaaS (software-as-a-service) offering that will allow customers to access multiple 4D data sources for visualization and analysis through a single user experience. We welcome the GeoSLAM team to our Faro family.”
“Joining with Faro represents the next step in the growth of GeoSLAM and the establishment of mobile mapping as a driver for growth in the way businesses map and understand their spaces,” said Andy Parr, GeoSLAM CEO. “Both companies share a vision of the importance of mobile scanning in the burgeoning digital reality capture market.”
GeoSLAM reported £14.5 million in revenue with 18% EBITDA in the fiscal year ending March 31, 2022. EBITDA, a non-GAAP measure, is calculated as net income/loss before interest (income) expense, net, income tax expense (benefit), foreign exchange rate variance, and depreciation and amortization. The transaction closed on Sept. 1, funded with available cash reserves and equity consideration.
Under terms of the agreement, GeoSLAM shareholders received a cash payment of £22.0 million and 495,562 shares of Faro stock subject to customary lock-up provisions. Faro expects the acquisition to be accretive to Non-GAAP EPS in 2023.
Faro serves the markets of architecture, engineering and construction (AEC); facility operations and maintenance; 3D metrology; and public safety analytics.
The Global Mapper Mobile Pro Module has always included the ability to connect to external GPS devices, but version 2.3 expands this to include support for any GNSS device that uses TCP/IP communication. Additionally, this mobile update provides Global Mapper analysis tools for volume calculation and viewshed for terrain data.
The mobile application of Global Mapper allows users to take the desktop functionality and existing data into the field for easy and accurate data collection and light processing. Since 2016, Global Mapper Mobile has been a user-friendly tool for capturing field data with portable iOS and Android mobile devices.
Version 2.3, available in both the free and Pro versions, adds many updates and improvements to the application, including the option to record and save voice memos to vector features and add multiple field-captured images to a feature. Autosave now prevents the loss of changes made to a map.
“Expanding user functionality in the field was the main focus of this release. Users of the base version of the application can utilize voice memos and the ability to save multiple photos to features for a more complete recording of field data,“ said Jeffrey Hatzel, Global Mapper Mobile product manager. “The Pro Module adds TCP/IP communication for external GNSS devices, expanding the list of compatible third-party devices. The addition of tools for volume calculation, viewshed analysis, and expanded projection support allows for even more workflows to be completed within the app.”
A roundup of recent products in the GNSS and inertial positioning industry from the July 2022 issue of GPS World magazine.
OEM
RTK Receiver
Hybrid high-precision GNSS
Photo: PP Solutions
The handheld RTAP2U is a hybrid high-precision, dual-frequency GNSS receiver. It can receive and process GPS, GLONASS, BeiDou, Galileo and QZSS signals. Its user-friendly web interface accesses and configures signal reception, skyplot, data collection, stop-and-go surveying, map display and more. With u-blox’s ZED F9P module, RTAP2U provides 2 cm or better accuracy within a few seconds. A firmware upgrade can provide precise point positioning (PPP) and real-time kinematic (RTK) capability.
The AsteRx-U3 Marine GNSS receiver offers accurate positioning near shore and offshore via centimeter-level real-time kinematic (RTK) or the built-in Fugro precise point positioning (PPP) sub-decimeter subscription service, delivered either over NTRIP internet or L-band satellite. Corrections delivered over L-band allow dredging, bathymetry or marine construction projects even in areas where there is no internet service. The AsteRx-U3 Marine receiver, enclosed in an IP68-rated housing, offers a dedicated L-band demodulator with a separate L-band RF input, which allows for the use of dedicated antennas for excellent reception of L-band signals even at high latitudes.
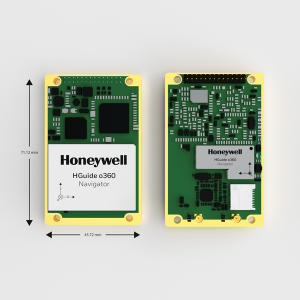
The HGuide o360 is a compact single-card, all-attitude GNSS/inertial navigation system (INS) that delivers accurate and robust position and attitude even in GNSS-challenged or denied environments to industrial and autonomous applications. The HGuide o360 contains a multi-frequency, multi-constellation, real-time kinematic (RTK) GNSS receiver with dual antennas, Honeywell’s i300 inertial measurement unit (IMU) technology, and a high-grade calibrated magnetometer. It is designed for platforms that require high-performance navigation data in an ultra-low size, weight and power (SWAP) package.
Offers optimal heading performance and resistance to vibration
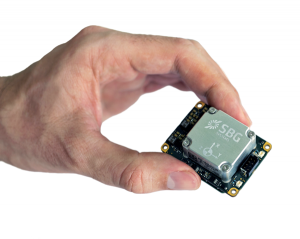
Photo: SBG Systems
The Quanta Micro GNSS-aided inertial navigation system (INS) offers a high level of navigation performance despite its low size, weight, power and cost (SWAP-C). It brings direct georeferencing to UAV and land-based surveying. Quanta Micro leverages a survey-grade inertial measurement unit (IMU) for optimal heading performance in single-antenna applications, and high immunity to vibrating environments. An optional secondary antenna enables fast heading initialization in low dynamic applications.
The GridTime 3000 GNSS time server is a software-configurable solution for utilities, providing redundancy, security and resiliency to protect against surges, adverse weather and cyberattacks. It generates precise time and frequency signals to synchronize analog and digital communication systems. The resilient timing platform incorporates multiple timing inputs for protection in the event of a GNSS signal disruption caused by severe weather, environmental disturbances or signal jamming or spoofing.
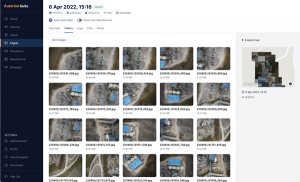
The Auterion OS serves enterprises that need component and payload flexibility, alongside a centralized and streamlined software workflow. Features include availability of precise mapping data in real time, automated processing for fast decision-making, standardization across Auterion-powered vehicles, connectivity that enables automated end-to-end workflows with no need for manual data transfer, and integration with third-party data-processing software such as Esri Site Scan or Propeller.
Designed to meet the need for highly accurate data
Photo: YellowScan
The YellowScan Vx20 lidar is the most accurate, fully integrated system of YellowScan’s product range. It can fly up to 330 feet (100 meters) while maintaining high accuracy throughout the point cloud. The Vx20 series is designed for applications that require sharp, accurate descriptions. Its Applanix APX-20UAV GNSS/inertial sensor provides precision of 1 cm and accuracy of 2.5 cm. With battery, the lidar scanner weighs 6.25 pounds (2.84 kg). It can be integrated with either multirotor or helicopter drones.
The WingXpand seven-foot expandable-wing drone folds to fit in a backpack. Its U.S.-made patented design combines the small size of a quadcopter with the horsepower of an airplane. The drone expands in less than 2 minutes and weighs less than 10 pounds. It can carry high-resolution cameras and other modular payloads such as a real-time pattern analysis system. More than 10 WingXpand UAS can fit in a public safety vehicle, more than 30 in a pickup, and 250 on a standard airlift pallet. WingXpand maximizes capability, efficiency and safety for the military and public safety officials. It also can be used by farmers, surveyors and inspectors.
The E300 drone package includes the E300 real-time kinematic (RTK) drone, flight-control software and an optional camera. It is suitable for topographic survey, urban construction, forestry investigation, emergency rescue, 3D modeling, mining and surveying. The drone is embedded with a high-precision K8 GNSS module that supports GPS L1/L2/L5, BeiDou B1/B2/B3/B1C/B2a, GLONASS L1/L2, Galileo E1/E5-a/E5-b/AltBOC/E6 and QZSS L1/L2/L5. With its intelligent recognition algorithms, the E300 can capture high-resolution images consistently even in complex environments.
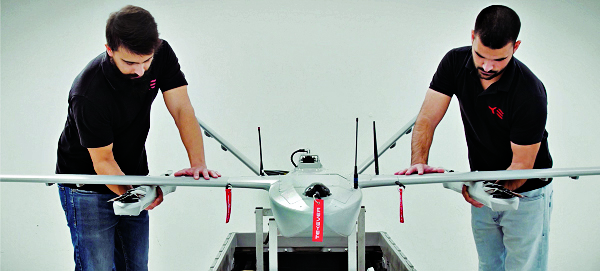
The AR3 unmanned aerial system (UAS) now has a “hot-swappable” vertical-takeoff-and-landing (VTOL) capability, able to switch from horizontal launch to vertical. It also now has integrated synthetic aperture radar (SAR). The AR3 is a shipborne UAS that supports multiple types of maritime and land-based missions up to 16 hours. With the upgrade, the AR3 becomes more operationally flexible. The newly added SAR provides the AR3 with a vastly greater operational range, and the ability to effectively detect, recognize and identify targets under any weather condition. Covering more than 20,000 square nautical miles per mission, the new AR3 is suitable for wide-area surveillance missions.
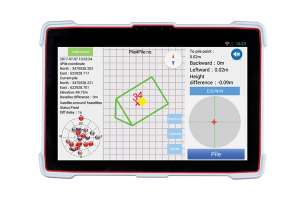
The P300 is a high-precision, in-cab Android tablet designed for precision agriculture, autonomous driving and machine control. Embedded with the K8 OEM module, the P300 tracks GPS, BeiDou, BeiDou-3, GLONASS, Galileo and QZSS signals to achieve centimeter-level accuracy. It provides enhanced heading and positioning performance for everyday field use. The P300 series is available as the P300 Plus (10.1-inch) and P300 Mini (8-inch).
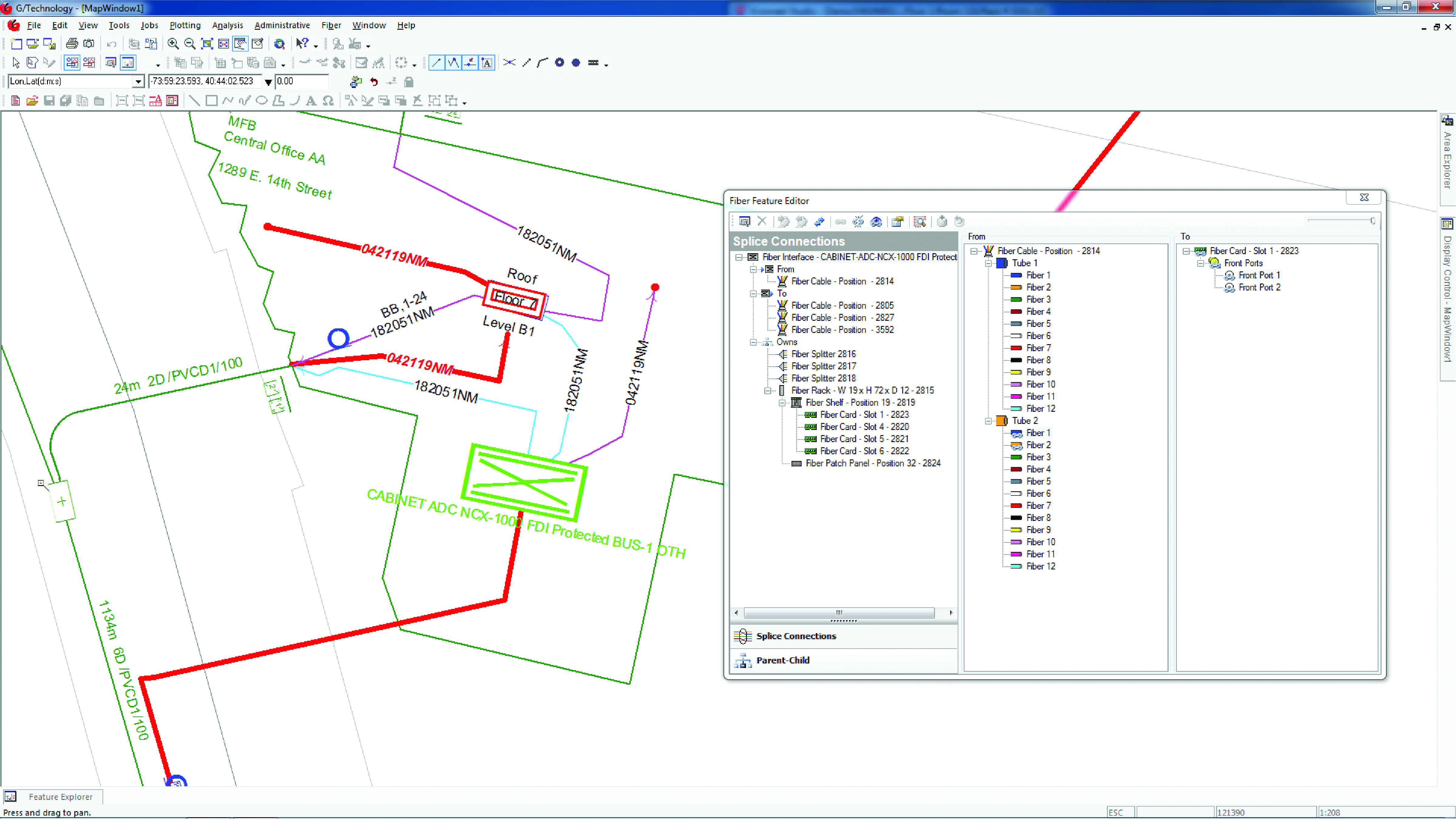
Intergraph G/Technology, an advanced utility geographic information system (GIS), enables utility companies to plan, design and document networks. It acts as a definitive source of reliable, location-based information that can be shared with users and systems across an organization. Available on the Oracle Cloud Marketplace, G/Technology provides utility operators with a scalable, secure and highly available GIS solution with reduced start-up costs and needed infrastructure. Running G/Technology on Oracle Cloud Infrastructure eases initial system deployment, enhances performance and automates scalability, availability and cybersecurity protection, ensuring the system is always up to date with the latest features and enhancements.
The Mosaic X mobile mapping camera captures extremely accurate photos and 360° videos, while simultaneously creating photorealistic 3D photogrammetry models, without the use of lidar. It can achieve 1-cm accuracy on road surfaces. The built-in CPU and GPU allow users to operate the camera and capture data without the need for a computer within the vehicle. Meticulous mechanical engineering and design ensure reliable and dependable use in harsh conditions such as moisture, mechanical shock and extreme temperatures. It can create high-quality 3D models, 3D reconstructions, and dense point clouds without the use of lidar. It comes with an AUX port to connect with external GNSS devices or lidar.
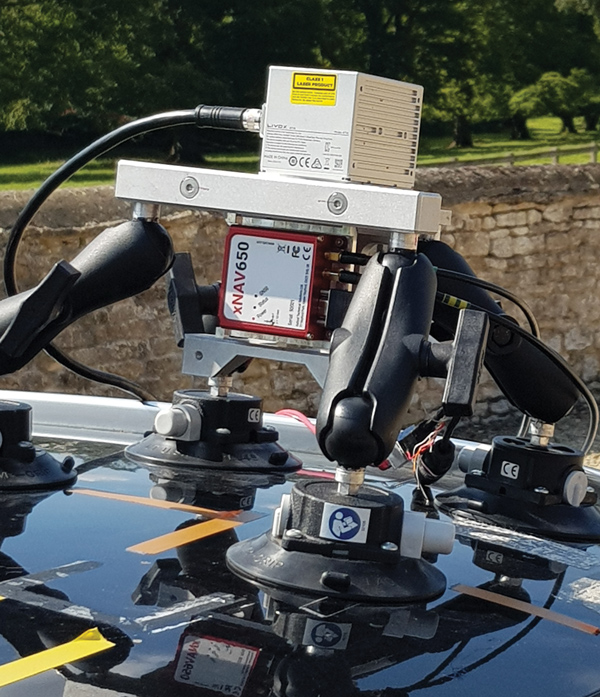
Mobile mapping using an OxTS xNAV650 INS and lidar sensor. Photo: OxTS
We discussed mobile mapping with Jacob Amacker, application engineer, OxTS.
How do you define “mobile mapping” as opposed to “surveying”?
We use the two terms interchangeably. Each one has a different connotation depending on where you are in the world and both can be useful. We use them to cover a broad range of use cases, but “mobile mapping” is used more specifically for land-based mapping of the environment. A typical application might be a van equipped with an INS [inertial navigation system] and lidar sensors.
“Surveying” can be used a bit more generally, applying to aerial or pedestrian-based mapping, but it does have the connotation of static mapping, which we do not typically handle.
What are your main markets for mobile mapping?
It is very hard to say. The world of mobile mapping is so diverse. However, lidar mapping could be seen as both the largest and the fastest-growing market in the surveying world as lidar has become widely affordable. Although our technology can be used with any surveying devices, at OxTS we particularly like to use lidar and are focusing on getting the best results from lidar data. This has included making our own point-cloud georeferencing software to maximize the potential of our navigation data in making point clouds.
What are the main differences between your devices for aerial mapping and for ground-based mapping?
We use the same INS device for both ground and aerial mapping. For use on manned aircraft, we would always recommend our highest accuracy system with the best IMU, the Survey+. The main source of inaccuracy in survey data will come from the IMU error over the range to the objects. Because most of this range is the aircraft’s altitude, this error is quite significant. For land-based mapping work, the measurements provided by the lighter and smaller xNAV650 are still suitable for many high-precision applications.
GNSS-INS integration has been done for decades. What is new and what are the remaining challenges?
It is now much more affordable to have very high-grade IMUs and GNSS receivers. Nevertheless, there will always be further improvements to be made to how the data streams are combined. On a similar note, other navigation aiding sources are increasingly being considered to supplement the IMU and the GNSS receiver — such as wheel speed sensors, lidar, camera odometry and others that can also be integrated to stabilize and improve the navigation data. Overall, it is very exciting what is yet to come out of INS technology. In recent years, it has become so good that people expect more and more from it, and this demand must be met. What happens when GNSS drops out? We are seeing increasing development to make the navigation data robust against challenges of any environment.
Given the IMU’s drift, for how long can your system function at an acceptable level in case of a GNSS outage?
It is difficult to put a number on what kind of drift is acceptable, as it depends on the application and the end-user requirements. Typically, half a meter of drift in one minute of GNSS-outage might be the goal for some of the higher-grade surveyors. Still others might only be satisfied with negligible drift.
What keeps the INS and the lidar unit synchronized during a GNSS outage?
The INS has an internal clock to keep the timing during a GNSS outage. Of course, this will not be as accurate as the atomic clocks on the satellites, but it is quite adequate to maintain survey-grade accuracy during GNSS outages. GNSS is still necessary to get the timing information in the first place, and this is a reliance that INS devices will want to remove in the future.