Point-process mapping links Easter Island statuary to freshwater sources.
By Robert DiNapoli, University of Oregon; Carl Lipo, Binghampton University; Tanya Brosnan and Matthew Becker, California State University, Long Beach; Terry Hunt, University of Arizona; Sean Hixon, Pennsylvania State University; Alex E. Morrison, University of Auckland.
Rapa Nui (Easter Island, Chile) is famous for its elaborate ritual architecture: more than 300 monumental platforms (ahu) and nearly 1,000 monumental, multi-ton anthropomorphic statues (moai). To date, however, we lack explicit modeling to explain spatial and temporal aspects of monument construction.
Photo: Steven Sullivan/Shutterstock.com
In a span of only about 500 years, from the 13th century A.D. to European contact in A.D. 1722 and into historic times, the Rapanui islanders sculpted and erected these famous megalithic statues.
Why? And why were they placed where they stand?
For many years, scholars thought that the island must have supported a larger and more complex society under more prosperous environmental conditions that then collapsed following a self-imposed “ecocide.” In recent years, nearly every major component of this narrative has been shown to lack empirical sufficiency.
In this paper, we use spatially explicit point-process modeling to explore the potential relations between ahu construction locations and subsistence resources, namely rock-mulch agricultural gardens, marine resources and freshwater sources — the three most critical resources on Rapa Nui.
Through these analyses, we demonstrate the central importance of coastal freshwater seeps. Our results suggest that ahu locations are most parsimoniously explained by distance from freshwater sources, in particular coastal seeps, with important implications for community formation and inter-community competition in precontact times.
The island’s marginal ecology limited the food options available to the inhabitants. These environmental constraints could be a key factor in the emergence of monuments on Rapa Nui, such as their role as adaptive responses to environmental uncertainty or as territorial signals of control over limited resources.
We quantitatively modeled how the spatial distribution of ahu is explained by different resources thought to be the focus of competition.
Point-process models (PPM) are a wide class of spatially explicit models that facilitate formal analysis of the relationship between point-patterns and a range of spatial covariates. PPM works by fitting a spatial intensity function to the intensity of an empirical point pattern and finding the values of the predictor variables (i.e., parameters) that best fit the data.
The technique is similar to geographically weighted regression or maximum entropy modeling but has a number of strengths, such as its ability to simultaneously model both first-order and second-order properties in the underlying point-pattern and how these properties may be dependent upon a set of underlying spatial covariates.
Our full paper in the January 2019 issue of PLOS One, an open-access scientific journal published by the Public Library of Science, presents a series of formal models that indicate that if Rapa Nui’s monuments did indeed serve a territorial display function (in addition to their well-known ritual roles), then their patterns are best explained by the availability of the island’s limited freshwater.
Kinematic Ground Control point for UAV photogrammetry: A dynamic duo of UAV and mobile van combine to deliver the accuracy of conventional methods with only 2+2 ground control points at the ends of the corridor.
By Ismael Colomina, Pere Molina and Roberto da Silva Ruy
A Brazilian and a Spanish company, ENGEMAP and GeoNumerics respectively, have finalized the accuracy evaluation of a mission conducted with the latter’s mapKITE technology on a Brazilian motorway in 2018.
The goal of the evaluation was to confirm the advantages of the mapKITE method and its kinematic ground control point (KGCP) concept over conventional corridor mapping methods.
The mapKITE and the conventional method delivered comparable accuracy results — the difference being that the latter requires a dense set of surveyed ground control points (GCPs) while mapKITE does the job with almost no GCPs.
For this purpose, a 4-kilometer segment of the Rodovia Raposo Tavares in São Paulo state was populated with a set of 37 evenly distributed, signalized, accurately surveyed ground points. The set was divided into two subsets of 23 GCPs and 14 ground check points (GChPs) — the ground truth — respectively. The 4-km road segment was also covered by 189 drone images and their corresponding 189 KGCPs. The image set was processed as a conventional aerial corridor block:
with the integrated sensor orientation (ISO) method in a 23 GCP + 14 GChP configuration, and
as a mapKITE aerial corridor block in a 4 GCP + 14 GChP + 189 KGCP configuration.
The two processes produced similar accuracy results: mean (μ), empirical standard deviation (σ) and root mean square (rms) error of the photogrammetric determination of the horizontal (EN) and vertical (h) coordinates of the GChPs against the ground truth. (All units are stated in millimeters.)
The mapKITE configuration uses only four GCPs (two at each end of the road segment) in contrast to the 23 GCPs of the conventional method. Nominal flying height of the drone was 120 meters above ground, producing an average ground sampling distance (GSD) of 2.3 cm. Forward image overlap was 80% resulting in a base-to-height ratio of 0.157.
MapKITE is a GeoNumerics patented method for 3-dimensional corridor mapping that combines the two latest geodata acquisition methods, terrestrial mobile mapping and aerial drone-based mapping. MapKITE is a tandem terrestrial-aerial mapping method and system composed of:
a terrestrial mobile mapping system (land vehicle and sensors) carrying
an optical metric target on its roof;
a drone aerial mapping system; and
a real-time virtual tether and post-mission software.
In a mapKITE mission, the drone follows the land vehicle, and thus the vehicle target becomes a kinematic ground control point visible and measurable on each image. It is a high-accuracy, high-resolution Earth observation method. MapKITE combines the advantages of mobile land-based encompassing images and 3D point clouds. MapKITE combines the advantages of mobile land-based (manned) and aerial drone (unmanned) mapping systems.
GeoNumerics (Castelldefels, Spain) is a research and development company specializing in geomatics and accurate navigation.
ENGEMAP (Assis, Sao Paolo, Brazil) is one of the largest and oldest mapping companies in Brazil. It has more than 100 employees, three aircraft, two mapping land vehicles, a number of rotary- and fixed-wing drones and a record of accomplished mapping and cadastral projects. ENGEMAP is officially authorized by the Brazilian Ministry of Defence (MD) and the Brazilian Department of Airspace Control (DECEA) to conduct mapKITE commercial flights in Brazil.
MANUFACTURERS
The mapKite campaign was conducted with a Sensormap SMM terrestrial mobile mapping system and a UAVision UX Spyro drone equipped with a NovAtel OEM2 GNSS dual-frequency receiver with a Maxtena antenna and a Sony α7R camera with a 25-mm camera constant lens. The INS/GNSS system in the Terrestrial Vehicle was a Span-CPT (Novatel) including dual-frequency antenna and DMI wheel sensor.
ISMAEL COLOMINA is chief executive and chief scientist at GeoNumerics. He has a Ph.D. in mathematics from the University of Barcelona.
PERE MOLINA is advanced applications program manager at GeoNumerics. He holds a master’s degree in mathematics from the University of Barcelona and a master’s in photogrammetry and remote sensing from the Institute of Geomatics, Catalonia.
ROBERTO DA SILVA RUY is technical manager at ENGEMAP. He has a Ph.D. from the Universidade Estadual Paulista.
A new map method opens up parking continuous-environment mapping for enhanced low-cost urban navigation. Collectively recorded context data by many identical platforms gather similar sensor readings when operating in a given area. Further processing integrates the data with a map and feeds the summarized results to a user.
ByIvan Smolyakov, Evgeny Klochikhin and Richard B. Langley
Complex, dynamic urban environments comprise millions of devices with localization capabilities. While GNSS remains a primary positioning tool, its performance is subject to significant degradation from blocked signals, multipath and non-line-of-sight (NLOS) signal reception. In aided navigation, a positioning filter with GNSS measurements integrates data from various sensors and correction streams to compensate for these disadvantages.
Low-cost platforms are limited with the variety and quality of sensors on board, as well as by processor performance and battery capacity. Positioning routines must be computationally light, energy efficient and make the most productive use of available data.
One new research area covers use of crowd-sourced GNSS data. Many vehicles now include some type of native wireless connection capability, which could be complemented by a designated third-party device.
The growth in connectivity brings an opportunity to access a stream of sensor data produced by a high number of devices operating in a localized urban area. Here, we explore the idea of creating a GNSS signal-strength map using the connected vehicle GNSS data stream and then use the map as statistical information for Kalman filter parameters tuning. This approach improves filter reaction to the environment and produces a positioning accuracy improvement.
SYSTEM ARCHITECTURE
C/N0 levels of reflected and diffracted signals are more likely to be lower than that of the LOS signals. We propose that the C/N0 level averaged during a given period among all satellites tracked in a given area would correlate with a higher probability of multipath-contaminated and NLOS signal reception.
A sufficient number of C/N0 readings associated with a given space-time cube should be collected to compute the statistics populating the signal-strength map. However, the city environment does not remain static: new construction occurs, traffic congestion shifts, and so on. Therefore, the C/N0 space-time statistics must be continuously updated in real time to reflect these changes. Additionally, the solution must be highly scalable as the market of connected vehicles is growing and so is the volume of the streamed data.
A recent advance in cloud-based data-stream processing, a data flow model treats an input data stream as something that will never become complete. A derivative of that model is Flink, an open-source framework capable of both unbounded data (stream) and bounded data (batch) processing, while treating bounded data as a special case of the streaming applications.
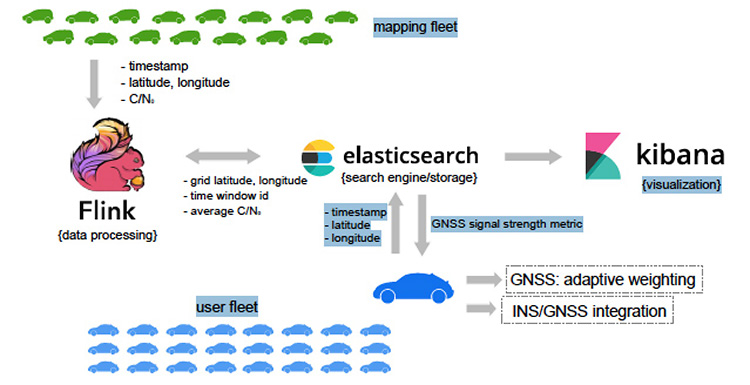
We use Flink as a core library for the environment mapping architecture as it fits the needs of event-time processing while being a highly scalable solution. The processing enables calculating necessary statistics based on a moment of time a reading occurred rather than based on a moment of time the reading arrived at the cluster. The proposed system architecture is presented in Figure 1.
The connected vehicle mapping fleet transmits packets of the GNSS receiver readings via cellular Internet connection to the server at 1 Hz. Each packet contains a timestamp in the UTC time system, the geographic coordinates determined by the proprietary positioning algorithms of a connected vehicle, and the C/N0 measurements per each tracked satellite.
The geospatial processing block calculates the average C/N0 metric among the readings of a given space-time cube. Computed statistics are sent to Elasticsearch, updating the map in real-time. Elasticsearch is an open-source, distributed search and analytics engine integrated with Kibana, an open-source data visualization tool. User platforms request the average C/N0 metric from the search engine with their UTC timestamp and coordinates and apply it in the processing filter.
PILOT PROJECT
The system is currently in prototype. Collection of the data populating the map was performed with two positioning boards designed by Parkofon Inc. and installed on the dashboard of a vehicle (Figure 2).
Figure 2. Mapping setup: Parkofon board is installed on the dashboard of a vehicle. (Image: Authors)
Lack of a high number of vehicles for the data collection campaign was compensated with an extensive piloting time (17 hours, 43 minutes) in a limited area, driving the same roads repeatedly. Two areas of New York City were the subject of extensive mapping.
Tests concentrated on two sectors with different GNSS signal strengths: sector A, a relatively open-sky area; and sector B exhibiting deep urban canyon conditions. The mapped average C/N0 is denoted as .
The of the less obstructed sector A = 39.3 dB-Hz, while that of the more obstructed sector B is lower: 18.1 dB-Hz. This tendency is repeatable throughout the surveyed area and allows for further GNSS signal-strength map integration into the algorithms at the user side.
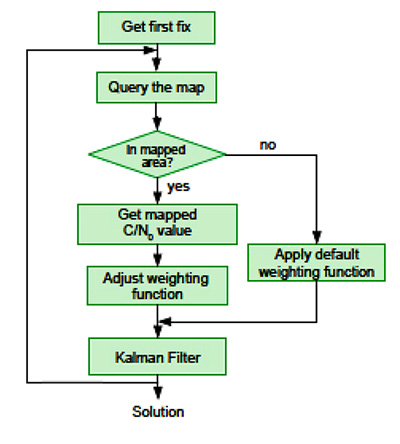
It is a challenge to find an optimal set of urban navigation filter parameters, as the signal obstruction environment changes significantly with the moving positioning platform. Our approach adjusts parameters of the GNSS observation weighting function with respect to the retrieved from the map. The algorithm scheme appears in Figure 3.
When the first position fix is obtained, the algorithm sends a request to the server with the timestamp and the coordinates determined at the previous epoch. If one is available in the current user area, the server response includes the metric retrieved from the GNSS signal-strength map. Next, the GNSS observation weighting function is adjusted according to equations given in the full technical paper (see Acknowledgment section).
PRACTICAL RESULTS
Algorithm performance was evaluated by analysis of the distances between the coordinates calculated with our engine and the centerline of the road in two downtown and two residential areas. For an estimated 86 percent of the track, our proposed map-aided weighting performed better than when the default weighting function was applied during the whole track.
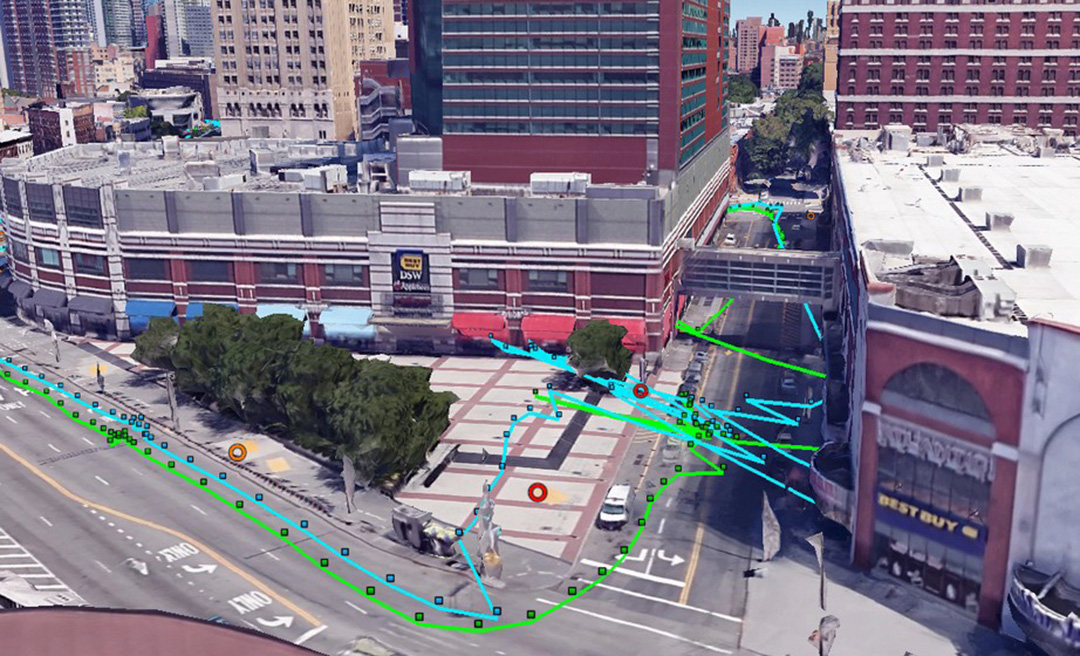
The map-aided weighting of the observations brings approximately 25 percent and 35 percent accuracy improvement in the dense urban area and in the intermediate residential environment respectively. Additionally, there were instances of faster solution re-convergence when fix was lost due to insufficient number of the satellites tracked in narrow streets or under obstructions (see Figure 4).
Figure 4. Example of faster map-aided solution re-convergence. (Image: Authors)
FUTURE WORK
For the mapped average C/N0 levels to be unbiased, normalization procedures must be implemented. This would soften or eliminate hardware constraints on the mapping fleet and facilitate its growth. With more data available, the temporal discretization of the map needs to be implemented as satellite geometry and multipath environment change throughout the day.
Optimal dimensions of the mapped space-time cube remain an open question: more real-world data needs to be collected to provide better mathematically-derived estimations. We plan to investigate the benefits of a variable-dimension space-time cube with respect to the area and the mapping fleet density. We also plan to extend the environment map-aided filter tuning to a multi-constellation GNSS approach integrated with inertial navigation systems and other sensors.
The technique is commercially implemented in Parkofon, a fully automated parking payment and guidance system that helps people find cheaper, safer and easier parking. The platform includes a mobile app and device placed in the car to guide drivers to open parking spaces in real time and charge them only for actual time parked in designated garages. Parkofon also offers real-time on-street space availability.
Acknowledgments
This article draws on a paper presented at ION GNSS+ 2018. For the full paper, see www.ion.org/publications/browse.cfm. Research is supported by the Natural Sciences and Engineering Research Council of Canada.
MANUFACTURERS
Experimental datasets were collected with a Septentrio AsteRx-m2 receiver and Maxtena M1227HCT-A2-SMA antenna. Parkofon boards carry a u-blox M8N receiver module and a Taoglas CGGBP.25.4.A.02 patch antenna.
IVAN SMOLYAKOV is a Ph.D. student in the Department of Geodesy and Geomatics Engineering at the University of New Brunswick (UNB).
EVGENY KLOCHIKHIN is CEO of Parkofon Inc., a smart mobility company utilizing the Internet of Things to guide drivers to open parking. He holds a Ph.D. in Public Policy and Management from the Manchester Business School, UK.
RICHARD B. LANGLEY is a professor in the Department of Geodesy and Geomatics Engineering at UNB.
Location intelligence powers applications with data and “live maps” updated continuously.
According to Forbes, 70 percent of telecommunications companies consider location intelligence critical to their success. The intelligence data is provided by specialists such as Google, Esri, Here and PlaceIQ.
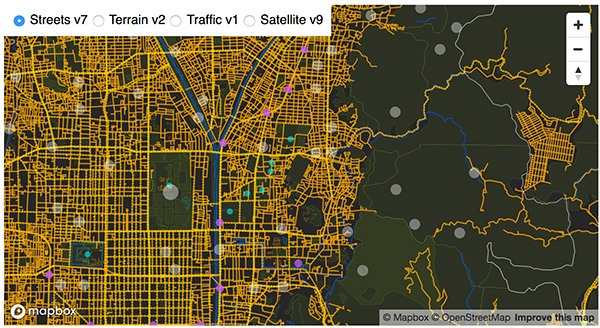
In January, Sprint and location intelligence startup Mapbox launched precision mapping technology with the Curiosity IoT network. The 5G network’s extreme bandwidth and low latency will allow Mapbox to collect higher volumes of richer data to create “live maps.” A live map is built not from traditional data surveys months or years before, but from data collected from hundreds of millions of location-enabled sensors that feed back information about the world in real time, including high-resolution video.
Mapbox uses artificial intelligence (AI) to turn the massive data flows into a picture of real time transit paths that can be used for precise, up-to-date routing.
Augmented Reality view from the Mapbox Vision SDK. (Image: Mapbox)
According to Mapbox CEO Eric Gundersen, maps that constantly update are essential to the internet of things (IoT). “As maps guide new smart machines on IoT networks, you remove the human in the middle that used to compensate for differences between the map and the real world,” he said. “Precision mapping services need to reflect the world as it is, at that precise moment so that those smart machines can travel safely and efficiently.“
According to Mapbox, smart machines such as drones and autonomous delivery carts will be able to make fast location and routing decisions using its detailed, updated maps.
Other companies that use Mapbox’s location services include IBM, Lonely Planet, Square, Tableau and The Weather Channel.
Planet (formerly Planet Labs) has put about 300 satellites into space, in charge of photographing the entire land mass of the Earth every day.
The satellites weigh 5 kg (12 pounds) and measure 20 x 20 x 44 centimeters, about the size of a loaf of bread. They are packed with commercial-off-the-shelf electronics and are built in downtown San Francisco. Mission control consists of a single engineer for dozens of satellites.
Aptly named “doves,” the satellites circle the Earth in 90 minutes, their cameras continuously rolling. “It gives you a perspective of the planet as a dynamic and evolving thing that we need to take care of,” said company co-founder Will Marshall.
Each day, the satellites transmit 1.2 million images at a spatial resolution of 3–5 meters, far more than enough to fully occupy all the analysts at the National Geospatial Intelligence Agency (NGA), one of Planet’s more than 200 customers.
Historically, the NGA has relied on three or four very large, very expensive — and to global adversaries, very predictable — spy satellites. The agency has found Planet’s approach intriguing and challenging.
Planet has devised computer algorithms to look for new features day to day, such as roads or buildings th
at may signal activity of a significant or nefarious sort. Other customer uses are more mundane, such as agricultural companies monitoring crop health.
Boundless. In December 2018, Planet entered into an agreement to acquire Boundless Spatial Inc., a St. Louis-based geospatial software solutions company, to further support its commercial business with the U.S. government and agricultural clients.
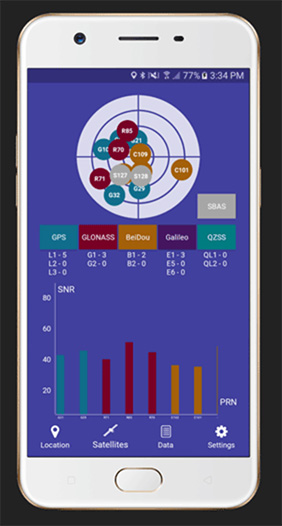
Global GNSS, a subsidiary of Polosoft Technologies, has launched a new mobile application named GNSS Surveyor, which is designed for the geospatial industry.
The application GNSS Surveyor provides location information and quality position data in real-time with sub-meter to centimeter accuracy. It needs to be connected to any external GNSS receiver via Bluetooth.
Features of the application include:
A one-touch configured command to communicate directly with the GNSS Bluetooth device.
Location information and quality of the position data in real-time with centimeter accuracy.
GPS data such as position, height, satellites and velocity.
Constellation information for GPS, GLONASS, Galileo, BeiDou, QZSS and SBAS satellites in the orbit.
Direct IP feature for RTK corrections data.
DMS to DD conversion or vice versa.
Real-time kinematic (RTK) correction data can be forwarded to a high-accuracy external device. The internal NTRIP client loads the RTCM data from the internet.
With GNSS Surveyor, location information is collected as latitude and longitude, altitude, speed or pace, bearing and UTC time.
GNSS precision includes global coverage, centimeter-level accuracy, fast time to first fix, multi-constellation and multi-band, and highest security, the company said.
Navigation uses include ground robotics navigation, lane-level navigation, heavy machine navigation, industrial navigation and tracking and commercial UAV.
The European GNSS Agency (GSA) is organizing a public consultation on the Integrity & Reliability of Digital Maps for Connected and Automated Driving, in connection with the recently published Commission Communication on Connected and Automated Mobility.
This communication addresses the need to investigate the integrity and reliability of digital maps in order to facilitate the deployment of fully automated and connected vehicles.
Image: GSA
Digital maps are an essential building block to ensure a safe driving experience for highly automated driving and autonomous vehicles. Purpose-built maps will be produced that will be much more reliable and accurate than those used for traditional applications.
These digital maps will be enriched with information from public databases and sensor data from connected vehicles. Traffic information, such as speed limits or the real-time dynamics of traffic flow, will help the vehicle’s navigation system to anticipate upcoming road conditions and take decisions beyond what is enabled by the vehicle’s on-board sensors.
Key role for GNSS
Satellite navigation (GNSS), and in particular Galileo, plays a key role in providing precise and secure positioning in vehicle navigation technologies for driverless mobility. Moreover, GNSS is the primary sensor for building digital maps to provide very accurate positioning together with other sensors, such as LiDAR, for example.
Dynamic data pose specific problems, particularly given their real-time nature: they must be generated, validated and made available to the user equipment without delay. This makes their integrity validation more challenging, and their transmission can be subject to errors or disruptions affecting the overall reliability.
Addressing the issue
Currently, it is the navigation and map provider’s responsibility to ensure the integrity of its products and the reliability of the information provided by third-party suppliers. However, until now the maps have been mainly used to support navigation, giving information to the driver, rather than to support safety-related functions.
Some industry standards exist or are being developed for data exchange and map content, but there are currently no specific standards or certification procedures to assess map data quality characteristics, such as reliability, integrity, and traceability. This public consultation is a starting point in addressing this issue.
Have your say
The public consultation can be accessed here. It will be open until Jan. 27.
Fugro has completed a landmark data acquisition campaign over the Turks and Caicos Islands, marking the first commercial success of its new Rapid Airborne Multibeam Mapping System (RAMMS).
Working under contract to the United Kingdom Hydrographic Office (UKHO), the company acquired more than 7,400 square kilometers of integrated, high-resolution bathymetric, topographic and image data. The resulting deliverables will support updated nautical charts and coastal zone management activities in the region.
Launched in August 2018, RAMMS is a highly efficient, next-generation airborne bathymetric mapping system that uses multibeam laser technology to deliver depth penetration and point densities, the company said. The compact sensor is deployed from small aircraft and can be integrated with other remote sensing technologies for simultaneous collection of multiple complementary datasets.
For the Turks and Caicos project, this approach made it possible to acquire near-shore (bathymetry) and coastal (topography and imagery) data in a single deployment, producing a cost-effective solution and advancing Fugro’s sustainability goals by significantly reducing fuel consumption.
“After years of development, it’s extremely gratifying to operate RAMMS commercially and to demonstrate to clients the value that this cutting-edge technology can bring,” said Mark MacDonald, Fugro Americas Marine Division hydrographic service line director.
He pointed to the massive Turks and Caicos project as an example. “The system’s multibeam lidar capability allowed us to achieve point densities that otherwise would have required vessel-based surveys. With RAMMS, we were able to avoid that additional time and expense, and significantly reduce health and safety exposure.”
Fugro is working on three additional RAMMS projects in the Americas region, one for UKHO in Belize, and two for the Canadian Hydrographic Society, in Quebec and Atlantic Canada. These projects are similar in scope to that of the Turks and Caicos project, combining bathymetry, topography and imagery for maximum value to clients, serving both navigation and coastal applications.
Based on steady interest in RAMMS, Fugro and technology partner Areté Associates are building an additional system to meet anticipated contracting volumes in 2019.
Fugro is also finalizing a cloud-processing capability, which will further improve client delivery by streamlining data review and approvals, and ultimately making data available for download-on-demand.
Additionally, Fugro aims to operate the unmanned aerial vehicle-proven system autonomously in 2019, providing further operational efficiency gains and increasing access to remote project areas.
A new interactive app by Esri models the cumulative number of climate hazards likely to occur under different emissions scenarios for any place on Earth through 2100. The app visualizes the index of 11 hazards, including warming, drought, heatwaves, fires, precipitation, floods, storms, water scarcity, sea-level rise, and changes in natural land cover and ocean chemistry. Users can see how severely locations around the world will be affected by these cumulative hazards under different global mitigation scenarios.
Esri created the app in partnership with the University of Hawaii’s Camilo Mora, lead author of a study in Nature Climate Change, which provides a comprehensive assessment of the simultaneous occurrence of multiple climate hazards strengthened by increasing greenhouse gas emissions and their effect on humanity. Mora’s analysis of thousands of peer reviewed scientific papers reveals 467 ways in which human health, food, water, economy, infrastructure and security have been impacted by multiple climatic changes.
By clearly visualizing the threats that our world’s ecosystem faces at every level, the maps and data hammer home how location intelligence can help with understanding what is at stake in making decisions, even at a global scale. Visualize the data here.
Advanced AI, robotics and autonomous vehicle services on Sprint’s dedicated IoT network will adapt to the real world using highly accurate, detailed and constantly refreshed maps.
Sprint and Mapbox are launching precision mapping technology with Curiosity IoT, allowing automated services that run on Sprint’s dedicated internet of things (IoT) network to move around the ever-changing world with pinpoint accuracy.
Smart machines, from drones to autonomous delivery carts, will be able to make fast location and routing decisions using highly detailed, accurate maps that are updated as the environment changes.
Sprint made the announcement this week at the Consumer Electronics Show being held in Las Vegas.
High Accuracy and Precise Detail with Live Maps. Mapbox offers what it calls a “live map”, a map built not from traditional data surveys months or years before, but from data collected from hundreds of millions of location-enabled sensors that feed back information about the world in real time.
Mapbox uses artificial intelligence (AI) to turn those massive data flows into a picture of real time transit paths that can be used for precise, up-to-date routing.
Image: Mapbox
Through its relationship with Sprint, Mapbox will leverage the inherent advantages of Curiosity IoT with 5G to take mapping to the next level. The network’s extreme bandwidth and low latency will allow Mapbox to collect higher volumes of richer data from the sensors, including high resolution video.
That data can be processed to identify and detect changes in the physical environment. Those changes are then incorporated into updated maps which can be distributed at scale to a wide variety of smart machines. The result is more accurate, more up-to-date maps that reflect the world in real time.
“Smart machine-based services need to be able to make immediate mobility decisions similar to the way a driver might react to construction, traffic or other obstacles on a street,” said Ivo Rook, senior vice president, IoT and product development at Sprint. “The launch of Mapbox’s precision mapping technology allows all intelligent machines to move at a level of precision never seen before. Our fully dedicated Curiosity IoT network and operating system — soon to be powered by Sprint’s mobile 5G connectivity makes this possible. From autonomous vehicles to advanced AI-based machines, precision mapping is a big step forward in making smart service models a reality for the immediate economy.”
“As maps guide new smart machines on IoT networks, you remove the human in the middle that used to compensate for differences between the map and the real world. Precision mapping services need to reflect the world as it is, at that precise moment so that those smart machines can travel safely and efficiently,” said Eric Gundersen, CEO of Mapbox. “Sprint’s Curiosity IoT network with mobile 5G provides platform services that make that real with high bandwidth, edge computing for object detection and data processing and super low latency.”
Curiosity IoT with 5G. Sprint 5G and Curiosity will create the new standard in IoT which features device data intelligence, over-the-air device management and chip-to-cloud security, the companies said.
When coupled with Sprint mobile 5G technology, Curiosity IoT’s dedicated, distributed and virtualized IoT core network is capable of supporting artificial intelligence, robotics, edge computing, autonomous vehicles and other IoT systems requiring extreme low-latency and high-bandwidth.
Researchers at the Massachusetts Institute of Technology (MIT) presented a project at the International Symposium on Experimental Robotics involving an autonomous drone fleet system that collaboratively mapped an environment under dense forest canopy.
Designed with search and rescue in mind, the drones used lidar, onboard computation and wireless communication, with no requirement for GPS positioning.
Each drone carries laser-range finders for position estimation, localization and path planning. As it flies, each drone creates its own 3-D map of the terrain. A ground station uses simultaneous localization and mapping (SLAM) technology to combine individual maps from multiple drones into a global 3-D map that can be monitored by operators.
The MIT team tested its concept via simulations of randomly generated forests, and world-tested two drones in a forested area at NASA’s Langley Research Center. In both experiments, each drone mapped a roughly 20-square-meter area in about two to five minutes, while the control system integrated their maps together in real-time.
The drones were programmed to identify multiple trees’ orientations, as recognizing individual trees in impossible for the technology, and individual trees’ orientation very difficult. When the lidar signal returns a cluster of trees, an algorithm calculates the angles and distances between trees to identify the cluster and determine if it has already been identified and mapped, or is a new mini-environment.
The technique also aids in merging maps from the separate drones. When two drones scan the same cluster of trees, the ground station merges the maps by calculating the relative transformation between the drones, and then fusing the individual maps to maintain consistent orientations.
A roundup of recent products in the GNSS and inertial positioning industry from the December 2018 issue of GPS World magazine.
OEM
Combination antenna
Long-range connectivity
Photo: Molex
The Molex highly compact 2.4/5-GHz combination GPS/Wi-Fi ceramic antenna is designed to be a cost-competitive solution covering the full GNSS band, 1.561 to 5.85 GHz. The triple-band ceramic antenna has Wi-Fi HaLow compatibility and is interference-resistant, supporting larger but lower (900-MHz) frequency ranges than 2.4/5-GHz connections. It also operates with lower power over longer ranges than 2.4/5-GHz Wi-Fi. Advanced Wi-Fi applications the internet of things, connected cars, smart homes and smart cities.
The MSB1054 multi-receiver module requires no external components, meeting needs of smartwatches, fitness trackers, logistics and navigation. Its Flash memory saves navigation data to optimize performance and provide a hot start. The ability to receive signals from several satellite systems significantly reduces the time to first fix. The module provides a built-in RF-front end (SAW filter, low-noise amplifier) as well as a temperature-compensated crystal oscillator (TCXO), so no external component is required other than an antenna. It measures 5.8 × 6.2 × 1 millimeters and uses 3.4 mA current in low-power mode, such as for tracking.
The GE310-GNSS is an internet of things (IoT) module with GSM/GPRS, multi-constellation satellite positioning and Bluetooth functionality in a 270-millimeter-squared form factor. It meets European demand for GSM/GPRS compact form factors and is part of Telit’s migration-support program that helps customers leverage 2G’s low cost and broad coverage while preparing for 4G and 5G. The GE310 enables OEMs and system integrators in asset management, utilities and telematics to meet the strong demand for low-cost, highly compact devices without tradeoffs in performance, reliability and functionality, particularly in regional markets such as Europe, where 2G is forecast to remain in strong growth in number of IoT connections for many years.
With multi-sensor fusion positioning and orientation
Photo: Unicore
The CLAP-B multi-GNSS/MEMS integrated inertial navigation board features a miniaturized high-performance inertial measurement unit (IMU) on a compact high-performance GNSS board. The high-accuracy GNSS positioning coupled with a high-precision gyro and accelerometer provides stable, continuous 3D position, velocity and attitude, as well as original acceleration and angular velocity measurements, even in GNSS-denied environments. CLAP (Concurrent Localization & Attitude Pilot) technology is a high-precision multi-sensor fusion positioning and orientation technology developed by Unicore. The board is compact, light weight and has low power consumption. It is designed for ease of integration and mass production, and is suitable for autonomous driving, smart surveying and UAVs.
The UNI-GR1 RTK GNSS receiver offers highly accurate heading and positioning output. It can be connected to any device through Wi-Fi, mobile data, radio, USB or serial cable. It simultaneously tracks GPS L1/L2/L5, GLONASS L1/L2, Galileo E1/E5a/E5b and Beidou B1/B2/B3 on 432 channels. The receiver has a built-in level, a LED ring driven by a nine-degrees-of-freedom inertial measurement unit. Users can configure numerous settings such as real-time kinematic, or begin surveying immediately with a smartphone or laptop.
Dynamic tilt functionality has been added to the Trimble SPS986 GNSS smart antenna. The dynamic tilt upgrade allows for faster data collection to enable construction surveyors to create larger digital terrain models faster and with improved accuracy. It can capture higher accuracy measurements on steeper slopes from a moving vehicle and more accurate volume measurements to save time and money on material planning. The dynamic tilt measurement mode also auto-measures antenna height. From inside the vehicle, contractors can set the height of the antenna and quickly interrogate surface models using the real-time 3D surface display in Trimble Siteworks field software.
The Skycatch Edge1 is an on-premise data processing and GNSS base station optimized for the Skycatch Explore1 and DJI Phantom 4 RTK drones. Field teams can fly a drone, process the data and receive centimeter-level data output in 30 minutes or less, directly to a tablet, without the need for internet or cellular connectivity. 2D maps and 3D point clouds can be shared from the tablet. The Edge1 includes built-in WiFi, LTE and reliable sub-5-centimeter accuracy, and delivers high-quality data output. It is also capable of running deep learning algorithms to extract more insights from collected data in near real time.
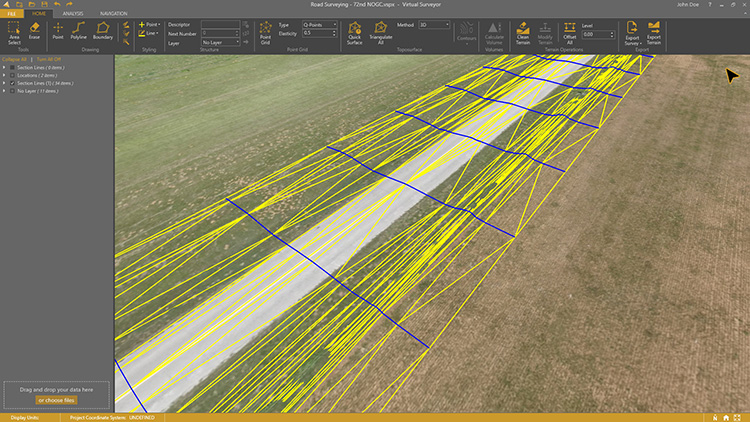
Drone surveying software Virtual Surveyor now eliminates the need for clients to use third-party applications to prepare data for processing. Version 6.1 handles on-the-fly projections that previously required a separate software package to set the data in the proper coordinate system. It bridges the gap between UAV photogrammetric processing applications and engineering computer-aided design (CAD) packages. The software generates an interactive onscreen environment with UAV orthophotos and digital surface models where the surveyor selects survey points and breaklines to define the topography, creating highly accurate topographic products for CAD input up to five times faster than otherwise possible. Surveyors can drag and drop all kinds of files into Virtual Surveyor: points, raster, vectors and point clouds. The point clouds are converted to a DSM for manipulation and processing, dramatically accelerating the time required to generate the CAD model.
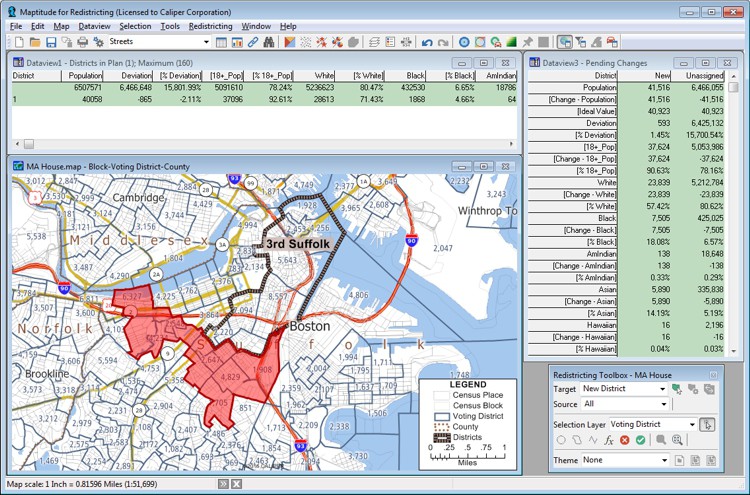
Includes Efficiency Gap Measure to explore redistricting problems
Screenshot: Mapitude
Maptitude for Redistricting is a professional tool for political redistricting. Maptitude provides measures and reports that support the creation of fair and balanced districts, and regularly enhances the software. Maptitude was used to democratize redistricting in California and is used by redistricters from independent commissions, non-profits, and civil rights groups, to the courts and political parties.
Stockpile measurements are up to 80% more accurate
Photo: DJI
The DJI Mavic 2 Pro drone is now part of the Kespry stockpile measurement solution for mining and aggregates companies. Kespry’s stockpile measurement solution produces data up to 80% more accurate than manual measurement. All of the survey data is stored in a central cloud application, accessible for analysis by the entire team. Large aggregates and mining companies can standardize and capture stockpile data across all their sites in the Kespry platform, while using Kespry 2s or DJI Mavic 2 Pro drones.
Designed for next-generation automotive applications
Image: Quectel
The automotive-grade C-V2X module AG15 features the Qualcomm 9150 C-V2X chipset paired with Quectel LTE module AG35. It is designed to meet the telematics and vehicle-to-everything (V2X) connectivity requirements of autonomous driving and road safety. It features a built-in multi-constellation high-precision GNSS (GPS/GLONASS/BeiDou/Galileo/QZSS) receiver with additional support from satellite-based augmentation systems (SBAS) and Qualcomm 3D dead-reckoning technology, which improves positioning accuracy and speed while simplifying customer designs. It is designed to allow low-latency, highly reliable and highly dense data exchange between vehicles and their surroundings, enabling effective information sharing among road users to avoid collisions, thus improving automotive safety, automated driving and traffic efficiency.
The SPC58 Chorus H microcontroller (MCU) line can run multiple applications concurrently to allow more flexible and cost-effective vehicle electronics architectures. The line is designed for high-end body, networking and security applications such as gateways, body-control modules, battery management and ADAS safety systems. The line has three high-performance processor cores, more than 1.2-MB RAM and powerful on-chip peripherals. The MCU securely delivers updates over the air for vehicle powertrain, body, chassis and infotainment features. With high security and large on-chip code storage, ST’s Chorus automotive microcontroller is a gateway/domain-controller chip capable of handling major OTA updates securely. Two independent Ethernet ports provide high-speed connectivity between multiple Chorus chips throughout the vehicle and enable responsive in-vehicle diagnostics.
The VBOX 3i RTK is a real-time-kinematic-enabled version of the VBOX 3i dual antenna that can be used in conjunction with an RTK differential base station to obtain ±2-centimeter positional accuracy in real time at 100 Hz. The data logger combines the advantages of a twin antenna GPS setup with GLONASS satellite tracking. It can be used in vehicle tests where positional accuracy and repeatability are of key importance, such as lane departure testing, distance to a fixed object or precise mapping. The VBOX 3i RTK comes with the VBOX manager, a display enabling users to change dynamic modes and filter settings, set up slip angle data and define antenna locations.
The StarLink TrackerWi‑Fi advanced vehicle-tracking device combines u-blox GNSS, 4G and Wi-Fi technology, eliminating the need to equip vehicles with a separate mobile Wi‑Fi hotspot. StartLink is suitable for applications for connected cars, telematics, vehicle diagnostics, fleet management, vehicle security, usage-based insurance, and rental and leasing service companies. With the Wi‑Fi hotspot, users can tap into cellular 4G to transfer telematics data to the fleet manager and send real-time data to the driver’s smart device or infotainment system.
The Notilo Plus team with the iBubble. (Photo: Notilo Plus)
Notilo Plus has launched iBubble, a fully wireless, autonomous and intelligent underwater drone that can be used for search-and-rescue operations, naval or underwater infrastructure maintenance, and subsea patroling. iBubble can accompany divers for up to an hour and down to 197 feet depth, enabling superior underwater imaging. The remotely operated vehicle (ROV) was designed using a patented underwater localization technology, which is mainly based on acoustic signal transmission and image recognition (video tracking). By combining these technologies, iBubble is able to locate precisely its target underwater and shoot stable footage. The iBubble is equipped with an obstacle avoidance system, real-time image recognition, a stabilization system and direct surface control.
Anafi Work is an ultra compact tool for professionals, helping them make informed decisions using the drone’s aerial insights. Anafi Work includes the advanced Anafi drone equipped with an innovative imaging system, a 4K/21MP camera with a 180° vertical orientation, allowing users to capture images of inaccessible areas.The drone operates for 1 hour and 40 minutes with its 4 USB-C smart batteries. It can be transported anywhere in a compact shoulder bag. Professionals can create 3D models of buildings, quickly and easily, using a one-year subscription to Pix4Dmodel.
The Riegl VQ-480 II and VQ-580 II are designed for airborne applications at mid-altitudes for use on both manned and unmanned aircraft. The new Mark 2 designs of previous models improve both performance and user-friendliness. Both offer a measurement rate of up to 1,250,000 measurements/second and a 75-degree field of view of suitable for corridor mapping, city modeling and applications in agriculture and forestry. Weighing approximately 10kg, they are ready for integration into helicopters and unmanned UAVs with a higher payload capacity. The VQ-480 II and VQ-580 II are prepared for smooth GNSS/IMU integration, offer interfaces for up to five optional cameras, and are have built-in and removable storage.The VQ-480 II works at a laser wavelength of 1550 nm; the VQ-580 II at the1064 nm wavelength suited to measure on ice and snow.
DroneNode is a portable, compact and inconspicuous counter-drone jamming device that law enforcement can use at large outdoor events without raising public concern (it is not yet authorized for use in the U.S.) It can simultaneously jam 2.4 GHz, 5.8 GHz and GNSS L1 and L2 bands up to one kilometer, causing drones to return to their point of origin or land. It is also effective against swarm attacks. Emergency broadcasts, cellphone communication and other dedicated channels are unaffected.
Skydio R1 users now have the ability to follow cars. New modes include Car Follow, improved Lead Mode, and other improvements throughout the system, which is built on top of the Skydio Autonomy Engine. The engine operates 13 cameras, enabling it to map and understand the world in real time, allowing it to be fully autonomous and independently capture video footage. Its Nvidia Jetsonl AI runs neural networks that trained for the Car Follow feature on datasets of automobile images.