Part 1 of this column appeared in the June Survey Scene newsletter, Part 2 appeared in the August newsletter. Upcoming Survey Scene newsletters will carry additional columns in this series.
Basic Understanding of Scientific and Hybrid Geoid Models
David B. Zilkoski
In my first newsletter column of this series, I discussed the basic concepts of GNSS-derived heights. I discussed the three types of heights involved in determining GNSS-derived orthometric heights: ellipsoid, geoid and orthometric.
In my second column (Part 2), I discussed guidelines for detecting, reducing, and/or eliminating error sources in ellipsoid heights. The column focused on guidelines for establishing accurate ellipsoid heights in a local geodetic network.
This column, Part 3, will describe the differences between a scientific gravimetric geoid model and a hybrid geoid model, and why it is important to use both geoid models in your analysis. The latest published United States National Geodetic Survey (NGS) hybrid geoid model, Geoid12B, is made consistent with the United States National vertical height reference frame, that is the North American Vertical Datum of 1988 (NAVD 88). This means a user will be consistent with NAVD 88 when using GEOID12B to estimate GNSS-derived orthometric heights. However, this doesn’t guarantee that your GNSS-derived orthometric heights are accurate.
NGS’ new Beta experimental geoid height models xGEOID14B and xGEOID15B are not distorted to fit the published NAVD 88 heights so they are useful for identifying valid NAVD 88 bench marks (that is, ensuring the monuments haven’t moved since their last survey and their published heights are still valid). Therefore, it is extremely important to validate all NAVD 88 height constraints used to estimate accurate GNSS-derived orthometric heights. Understanding NGS’ scientific and hybrid geoid models will help the user perform the appropriate analysis to determine which leveling-derived orthometric height constraints should be used as constraints. This newsletter will focus on differences between geoid models in a local project area.
Information on NGS’ experimental geoid models can be found here.
Thursday, August 20, 2015
Yearly Experimental Geoid Model Available for Public Review
In 2022, NGS will replace the current North American Vertical Datum of 1988 with one that is based on the geoid — a model of global mean sea level that is used to measure precise surface elevations. NGS created and released annual experimental models of the geoid starting in 2014. This year’s models, xGEOID15A and xGeoid15, are now available for public comment on the NGS beta website. The annual experimental models include new data from the Gravity for the Redefinition of the American Vertical Datum project, which has systematically collected airborne gravity data across the nation since 2008. For more information, contact: [email protected]
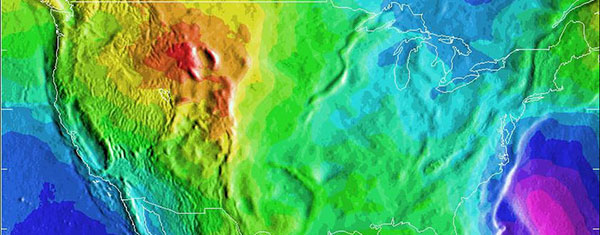
A depiction of the United States geoid. Areas in yellow and orange have a slightly stronger gravity field as a result of the Rocky Mountains.
While we often think of the earth as a sphere, our planet is actually very bumpy and irregular.
The radius at the equator is larger than at the poles due to the long-term effects of the earth’s rotation. And, at a smaller scale, there is topography—mountains have more mass than a valley and thus the pull of gravity is regionally stronger near mountains.
All of these large and small variations to the size, shape, and mass distribution of the earth cause slight variations in the acceleration of gravity (or the “strength” of gravity’s pull). These variations determine the shape of the planet’s liquid environment.
If one were to remove the tides and currents from the ocean, it would settle onto a smoothly undulating shape (rising where gravity is high, sinking where gravity is low).
This irregular shape is called “the geoid,” a surface which defines zero elevation. Using complex math and gravity readings on land, surveyors extend this imaginary line through the continents. This model is used to measure surface elevations with a high degree of accuracy.
How Does the U.S. National Geodetic Survey Generate a Geoid Model?
Generating geoid models is a fairly complex process and is performed by individuals with expertise in physical geodesy and geophysics. It is too complex of a topic for this newsletter but the following excerpt from an NGS publication by Dan Roman provides a good overview of NGS’ process.
Development of the North American Gravimetric Geoid: Adapting the Process to Determine a Unified Central American Geoid
D.R. Roman National Geodetic Survey, 1315 East-West Highway, Silver Spring, MD, USA, 20910
2 Data & Process Improvements
Techniques discussed here have already been addressed previously in Roman and Smith (2001) and Smith et al. (2001), hence only a summary of the approach discussed in those papers is given here. Essentially, the approach currently under investigations seeks to take advantage of recent and pending gains in various data sets related to the gravity field and significantly reduce approximations considered acceptable in the past.
The first thing to consider is the justification for using a geoid over a quasi-geoid, or more accurately, orthometric heights over normal heights. Convincing arguments have been made for orthometric heights (Holdahl 1984) and normal heights (Heiskanen and Moritz 1967). While orthometric heights require extensive knowledge of the gravity field, it is just that reason that warrants their use. Given the extensive knowledge and available data sets, it is incumbent on governmental agencies to generate such models. With a model of the gravity field from the surface to the geoid at hand, anyone subsequently desiring to transform from orthometric to normal heights need only apply it. However, if normal heights are developed and orthometric heights are later desired, the development of such a model will then be required. Clearly, this is a task best suited to national and international organizations that have access to such data and methods. It should not be left to those researchers desiring to use height models in their studies that may not have access to sufficient resources to accomplish this.
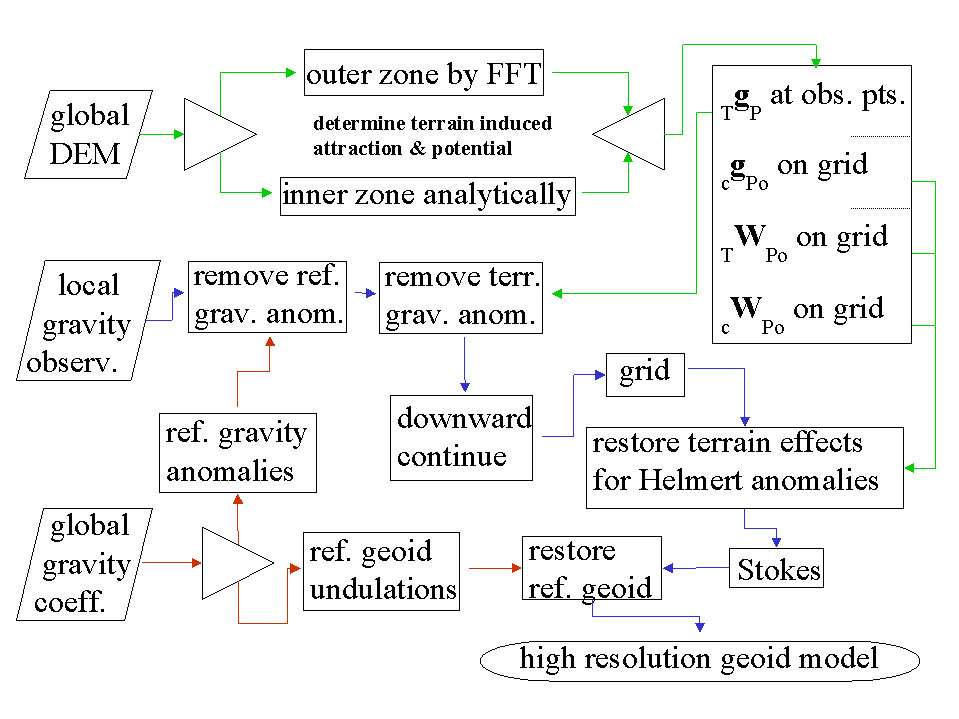
With that understanding then, the development of a gravimetric geoid model follows as a mechanism to readily convert between ellipsoidal and orthometric heights. The method summarized here seeks to break the gravity field into three components and solve them separately. In fact the long wavelength component will be derived from a global reference gravity model. The short wavelength will be determined from the terrain. Both of these components will be removed from available gravity observations, which will then reflect the intermediate wavelength signal. A flowchart depicting the determination of these three signals and the generation of a gravimetric geoid is given in Figure 1. Paths shown in red highlight the use of the reference model, paths in green show the determination of the terrain effects, while paths shown in purple highlight the main path to determining Helmert anomalies and then a gravimetric geoid model.
Fig. 1 Determination of a gravimetric geoid using Helmert anomalies.
The expected accuracy of global gravity models in the near future is expected to vastly improve with commission errors below 1-2 cm at wavelengths of 200-300 km (Tscherning et al. 2000). Use of a remove and restore technique (Bašiæ and Rapp 1992) will then result in significantly reduced errors in the residual signal that will be manipulated.
The approach discussed in Roman and Smith (2001) develops the North American gravimetric geoid by removing the terrain effects, downward continuing the residual values, and then restoring the effects of the condensed terrain to generate Helmert anomalies (Heiskanen and Moritz 1967).
To this end, the gravitational attraction of the terrain (TgP) will be calculated and removed from the gravity observations. It will be split into inner and outer zones to reduce computation times. Smith et al. (2001) showed that the effects of using FFT to determine gravitational attraction and potential for both condensed and 3D masses is negligible beyond about a 4 degree cap radius from the point of interest (P). Inside that zone, DEM’s are employed to capture the spherical relationships between the points and more accurately determine the attraction. With available or pending 1 and 3 arc-second DEM’s (Smith and Roman 2001a, NIMA 2001), the signal that may be determined is limited mainly by the computational facilities available to a researcher.
Additionally, the DEM’s will be used to construct grids for the attraction and potential of the condensed terrain (cgPo and cWPo), as well as the potential of the actual terrain (TWPo), all on the geoid. This will capture the short wavelength gravity signal represented by the terrain to the resolution of the grid generated and facilitate later incorporation of this signal into Helmert anomalies.
The resulting point values should be composed mainly of intermediate features in the gravity field with sources deriving from variations in the Moho depth and lateral density variations. This signal should be sufficiently smooth to reduce errors resulting from downward continuation. It should also sufficiently sample the intermediate field to permit the use of minimum curvature (Smith and Wessel 1990) to generate a grid at the same interval as that of the above terrain effects.
Once these terrain effects are restored, these extremely high resolution grids represent residual Helmert anomalies and may be processed using the Stokes integral to determine a best fitting residual gravimetric geoid. Adding the reference geoid derived from the selected global coefficient model will create an equally high-resolution regional gravimetric geoid model.
For a specific country, GPS-derived ellipsoid heights at leveled bench marks (GPSBM’s) provide control information for generating a hybrid geoid model that can be used to specifically, easily, and accurately transform heights between ellipsoidal and orthometric heights (Smith and Milbert 1999, Smith and Roman 2001b).
What are Hybrid Geoid Models and how are they Generated?
NGS’ hybrid geoid model GEOID12B is computed based on the gravimetric geoid USGG2012. As described above, the gravimetric geoid is computed using the satellite model (GOCO3S), terrestrial gravity data, and the altimetric gravity anomaly over oceans. The heights of USGG2012 represent an equipotential surface relative to the reference ellipsoid. The differences between USGG2012 and the zero height surface of NAVD88 are represented by NAD 83 (2011) GNSS-derived ellipsoid heights on NAVD 88 published benchmarks (GPSBM data). See article by Milbert, D.G., 1998: “Documentation for the GPS Benchmark Data Set of 23-July-98,” IGeS Bulletin N. 8, International Geoid Service, Milan, pp. 29-42.) for a excellent description of NGS’ GPSBM dataset.
Currently, the USGG2012 is fitted to the GPSBM data by using the method of least squares collocation. (See section labeled “Excerpts from NGS’ Geoid 12 Web Page” for specific details on how NGS generated hybrid geoid model GEOID12B.) Areas where there are no GNSS observations on published NAVD 88 benchmarks are filled in by USGG2012 geoid. This means a user will be consistent with NAVD 88 when using GEOID12B to estimate GNSS-derived orthometric heights. Being consistent with NAVD 88 is important but being consistent doesn’t guarantee that your GNSS-derived orthometric heights are accurate. The documentation of GEOID12B states that “The relative accuracy of GEOID12B to NAVD88 is characterized by a misfit of +/-1.7 centimeters nationwide.” However, if a published NAVD 88 height used in the development of the hybrid geoid model isn’t valid, then the model is precise but not accurate. That’s why it is important to ensure the monuments used in hybrid geoid models haven’t moved since their last survey and that their published heights are still valid. We will discuss this in more detail later in this newsletter.
Hybrid geoid model, GEOID12B is computed based on the gravimetric geoid USGG2012 . More specifically, they are computed using the satellite model GOCO3S, terrestrial gravity data, and the altimetric gravity anomaly over oceans. The heights of USGG2012 represent an equipotential surface relative to the reference ellipsoid. The differences between USGG2012 and the zero height surface of NAVD88 are represented by GPSBM data.
Currently, the USGG2012 is fitted to the GPSBM data by using the method of least squares collocation. That implies that the voids or empty areas where there are no GPSBM data are filled in by USGG2012 geoid.
There are over 500,000 leveled marks and 80,000 GPS marks over U.S. territory. Of those, there are only 26,000 GPSBM, with half of them concentrated in 5 states. The data density is uneven and sparse in some states. Lists of GPSBMs can be downloaded from the GEOID12B home page.
The GPSBM data provide the geoid height ‘N’ by differencing the ellipsoidal height ‘h’ from the orthometric height ‘H’:
N = h – H
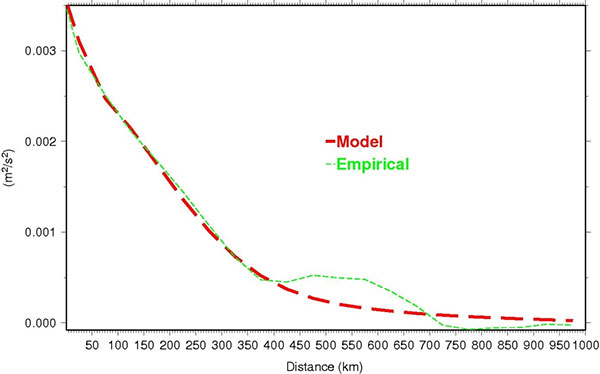
The difference between the geoid height N and that of USGG2012 is computed at every GPSBM. Then, a mathematical model using Least Squares Collocation (LSC) fitting Gaussian functions to describe the behavior seen at the GPSBM is developed. Figure 1 shows empirical data versus the model.
Figure 1: Covariance functions of the geoid differences between USGG2012 and GPSBMs.
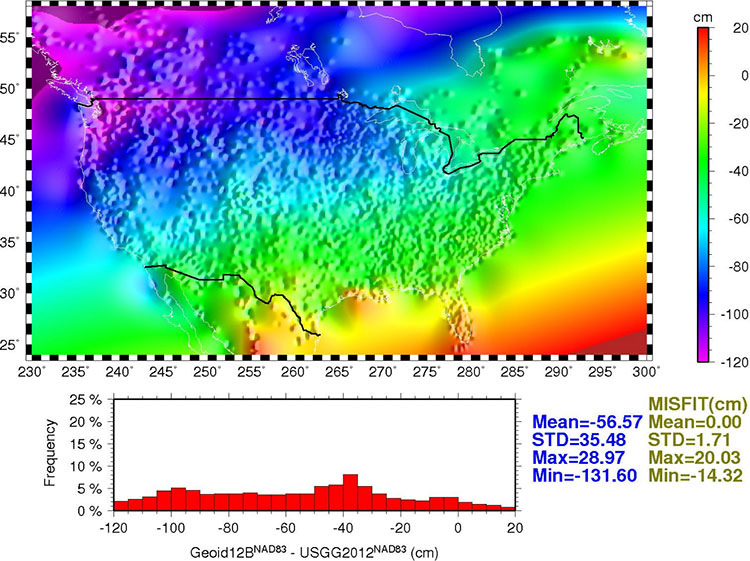
Once the relationship between the points is modeled, the model is used to generate a regular grid for interpolation purposes. Figure 2 shows the final conversion surface. This surface represents the difference between NAVD 88 as a datum and the geopotential (geoid) surface used in the gravimetric geoid and is representative of what the datum transformation surface will be when the new geopotential datum is released in 2022. (Similar to VERTCON, which transforms heights from NGVD29 to NAVD88.)
Figure 2: GEOID12B conversion surface.
Summary and Recommendations
Three hybrid geoid models GEOID12, GEOID12A, and GEOID12B are created. They are very similar, but have distinctive differences in few areas. GEOID12A differs from GEOID12 in that it does not use GPSBM data collected in the southern tier states along Gulf Coast, while GEOID12B differs from GEOID12A only in Puerto Rico.
Data in the database are constantly updated, hence older geoid models do not reflect the newer data. To guarantee data consistency, latest model should be used. At this time, GEOID12 and GEOID12A should be superseded by GEOID12B.
Use data conversion outside the GPSBM data areas with caution. Significant extrapolation errors are expected in areas where there are no GPSBM data.
The relative accuracy of GEOID12B to NAVD88 is characterized by a misfit of +/-1.7 centimeters nationwide.
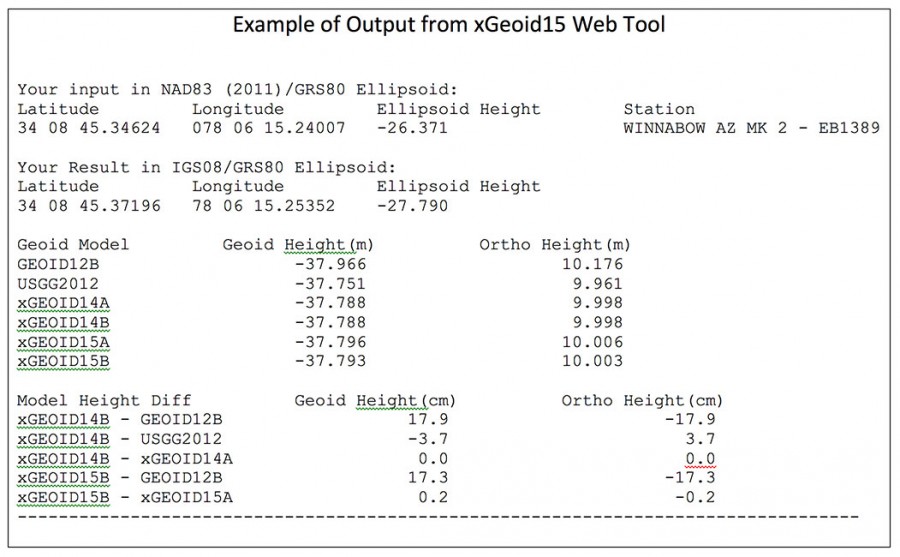
As previously stated, NGS released its latest gravimetric geoid model, xGEOID15. This site will allow the user to compare geoid heights from GEOID12B, USGG2012, xGEOID14 and xGEOID15. (See an example of an input and an output file below.) There are some limited features to this tool. It only provides the results in IGS08 and you are limited to the number of coordinates you can submit at once (20 stations).
Saying that, this tool can be useful for identifying valid NAVD 88 published monuments to be used in the development of future hybrid models. More importantly, it can be used to identify monuments that should NOT be used in future hybrid geoid models or used as constraints in GNSS survey project adjustments.
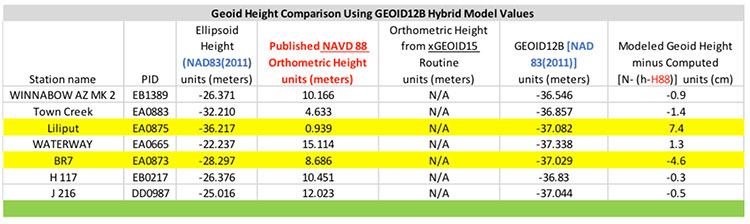
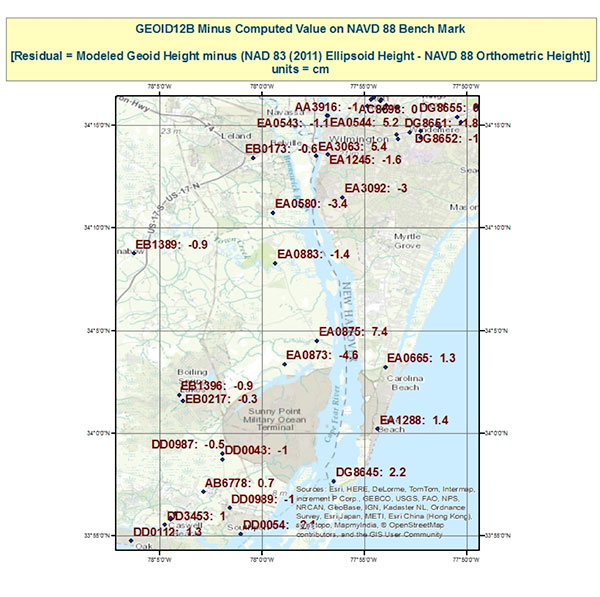
First, let’s look at the hybrid geoid model GEOID12B values compared with computed geoid height values using the equation N (Computed Geoid Height) = [h (NAD 83 (2011) Ellipsoid Height) – H (NAVD 88 Orthometric Height)]. Table 1 lists the differences between the modeled GEOID12B values and the computed geoid height values for a few stations in an area in eastern North Carolina. Figure 1 depicts the stations locations and values. Many of the differences are less than 1.5 cm which is consistent with NGS’ documentation of GEOID12B that states “The relative accuracy of GEOID12B to NAVD88 is characterized by a misfit of +/-1.7 centimeters nationwide.” However, what is important to notice is that two stations have large differences; station LILIPUT’s difference is 7.4 cm and station BR 7’s difference is -4.6 cm (See highlighted rows in table 1 and boxed area on figure 1). This means that the relative difference between stations LILIPUT (EA0875) and BR 7 (EA0873), which are only 3.3 km apart, is 12.0 cm. This is a large difference and may be indicating a large error in the ellipsoid height and/or the orthometric height at station LILIPUT (EA0875) or station BR 7 (EA0873). In the second newsletter we highlighted that stations LILIPUT and BR 7 were only 3.3 km apart but were not simultaneously observed during the same session. Since the relative difference is 12 cm, the ellipsoid heights of these two should be investigated. It should also be noted that the difference between stations BR 7 (EA0873) and TOWN CREEK (EA0883) is only 3.2 cm. This implies that station B 7 (EA0873) is consistent with some of its neighbors. In the second newsletter we noted that stations B 7 (EA0873) and TOWN CREEK (EA0883) were simultaneously observed during the same session. This may be an indication that B 7 is stable relative to its neighbors and that the orthometric and/or the ellipsoid height of station LILIPUT needs to be investigated.
So what does this mean to the user? If the user establishes a GNSS-derived orthometric height near station LILIPUT using GEOID12B, their results will disagree with the published NAVD 88 heights to around 7 cm; if they establish a GNSS-derived orthometric height near station BR 7, they will disagree with published NAVD 88 heights to around –5 cm. This could also mean that the results in a project could really disagree by more than 7 cm if station LILIPUT moved since its last survey. At this moment, we don’t have enough information to determine if the ellipsoid height or the orthometric height is the problem, or which station may have moved since its last survey.
Table 1. Geoid Height Comparison using GEOID12B Hybrid Model Values.Figure 1. Geoid12B minus Computed Value on NAVD 88 Benchmarks.
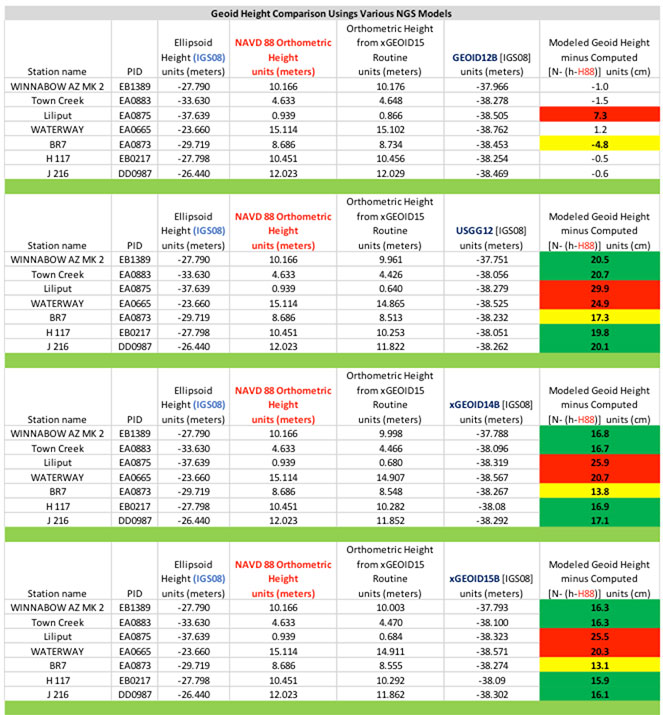
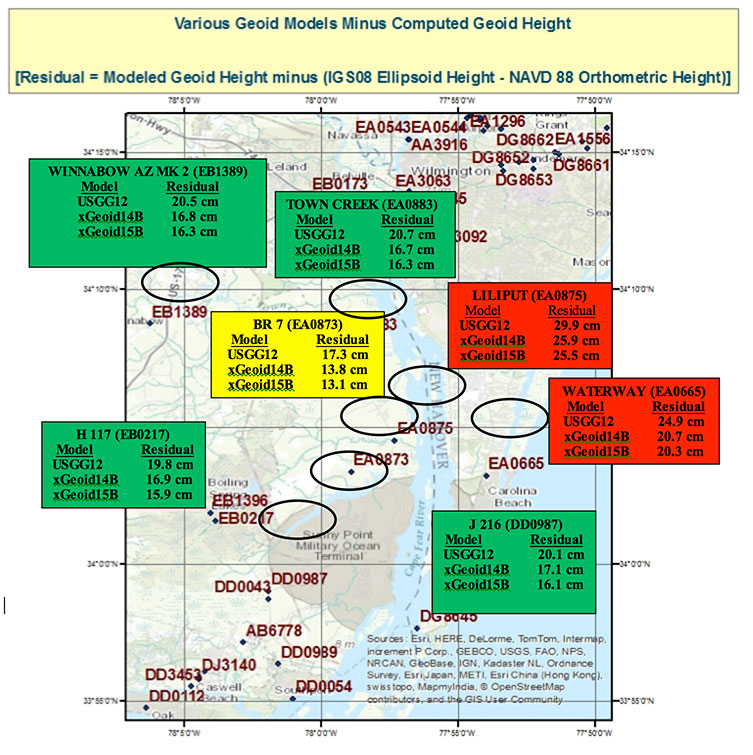
Next, let’s look at the differences using the experimental geoid models which are not distorted to be consistent with the NAVD 88 published heights. There will be a bias and a tilt between the systems but in this small areal extent the tilt should not be significant to our analysis. The bias can be removed by looking at relative differences between stations. Table 2, titled “Geoid Height Values for Various NGS Models using xGeoid15 Web Tool,” provides the modeled geoid height minus the computed geoid height where N (Computed Geoid Height) = [h (IGS08 Ellipsoid Height) – H (NAVD 88 Orthometric Height)]. Figure 2, titled “Various Geoid Models minus Computed Geoid Height,” depicts the differences between the various experimental models and computed geoid heights.
Table 2. Geoid Height Values for Various NGS Models using xGeoid15 Web Tool.Figure 2. Various Geoid Models minus Computed Geoid Height.
What is important to note is that stations LILIPUT (EA0875) and WATERWAY (EA0665) seem to be outliers compared to the other stations in the area of study (red boxes on figure 2); and station B 7 (EA0873) seems to be consistent with its neighbors (yellow box on figure 2). For example, station LILIPUT (EA0875)’s residual using xGeoid15B is 25.5 cm and station BR 7 (EA0873)’s residual using xGeoid15B is 13.1 cm, a relative difference of 12.4 cm. Similarly, station TOWN CREEK (EA0883)’s residual using xGeoid15B is 16.3 cm and station BR 7’s residual is 13.1 cm, a relative difference of only 3.2 cm. In my opinion, station LILIPUT (EA0875) needs to be investigated to determine if it has moved since it was last surveyed. In addition, stations east of LILIPUT (EA0875) such as WATERWAY (EA0665) should also be investigated for an ellipsoid and/or orthometric height issue. As previously mentioned, it is also important to note that station BR7 (EA0873), the box in yellow, appears to be consistent to the 3 cm level with its westerly neighboring stations (the boxes in green). This is important to note because the hybrid geoid model could be significantly difference around stations LILIPUT and BR 7 if station LILIPUT was not used in the development of the hybrid geoid model. I am not suggesting that NGS did anything incorrect by including these stations. The goal of the hybrid geoid model is to be consistent with published NAVD 88 values. Unless there is enough information to determine that a station has moved since the last time it was surveyed, the station should be included in the hybrid model. This is where the user may be able to help NGS. If users would investigate outliers like LILIPUT and BR 7 and provide new GNSS survey data and/or leveling data, NGS may have the appropriate information to determine if the monument should be included in the hybrid model.
Part 2 in this Survey Scene series discussed procedures which need to be followed to detect, reduce, and/or eliminate error sources to estimate accurate GNSS-derived ellipsoid heights. This column, Part 3, discussed why a user should understand the differences between NGS’ scientific gravimetric geoid model and hybrid geoid models, and why it is important to use both types of geoid models in their analysis. It demonstrated how to use these geoid models and ellipsoid heights to identify potential issues with published NAVD 88 heights.
My next newsletter column will focus on analyzing the NAVD88 orthometric heights in this area. It will provide basic procedures for validating NAVD 88 height constraints used to estimate GNSS-derived orthometric heights.
Satel’s new UHF radio data modem Compact-Proof, designed for outdoor measurement applications, features autonomous rechargeable battery power and a robust housing with IP67 protection.
Compact-Proof from Satel gives users double advantages with a powerful lithium-ion battery and the EASy radio data technology including a display and a robust housing with IP67 protection, the company said. With transmitting power of 1,000 mW, it can be operated fully autonomously as a repeater station in the field for more than 15 hours. The power can also be supplied parallel via an external rechargeable battery with a solar panel; alternatively, the Compact-Proof can be recharged overnight, and within five hours it is ready for the next work day.
The user-friendly installation, robust IP67 housing and 4-pin and 8-pin ODU connections make the new radio data modem Compact-Proof attractive for measurement applications, Satel said. The device features all functions of the Satel radio data modems EASy and 3AS and is 100 percent compatible with these solutions.
In addition, it supports the radio protocols of Pacific Crest, Trimble and other GNSS providers, which expands the areas of application.
Whether in the rainforests of Vietnam or in the Arctic, the temperature range of -30°C to +65°C and the frequency ranges of 330 MHz…420 MHz and 403 MHz…473 MHz make the Compact-Proof a reliable partner for all outdoor applications, Satel said. The housing features a robust, compact design with a display and foil keyboard.
As a light version — without an internal battery — the device offers numerous advantages for outdoor applications and even withstands the harsh conditions of machine control environments, for example.
In Germany, radio data transmission solutions from Satel are distributed exclusively by systems provider Welotec.
Topcon Positioning Group has added a rotary-wing unmanned aerial system (UAS) to its mass data-collection solutions line. The Falcon 8 — powered by Ascending Technologies — is designed for inspection and monitoring, as well as survey and mapping applications.
“Rotary-wing systems provide the perfect solutions for small-scale sites and projects for which flexibility of takeoff and landing or an oblique perspective is required,” said Charles Rihner, vice president of the Topcon GeoPositioning Solutions Group. “The Falcon 8 offers the flexibility to maneuver in small spaces and can cope with challenging environments often presented in inspection and monitoring. It is also well suited for smaller mapping or modeling projects up to 85 acres that require high-resolution imaging.”
The Falcon 8 features new AscTec Trinity technology, an autopilot safety feature that provides three levels of redundancy for protection against performance drop or loss of control. Three IMUs (inertial measurement system) synchronize all sensing data and identify, signal and compensate when needed.
Two models are available — the GeoEXPERT for surveying, modeling and mapping projects, and InspectionPRO for industrial inspection and monitoring applications. The GeoEXPERT includes a HD RGB camera payload, while the InspectionPRO features an HD RGB camera and infrared sensor combination.
“Both versions offer easy deployment and operation with real-time video and data monitoring capability, navigation software for planning and optimizing flights, as well as photo-tagging and desktop software to quickly generate high-quality and easy-to-edit material,” said Rihner.
The Falcon 8 complements the Topcon Sirius Pro fixed-wing UAS, providing large area accurate mapping without the requirement for traditional ground control.
BYOD Sub-Meter Positioning for Mapping and GIS Professionals
Employees bringing their own mobile phones and tablets to their jobs in the field enables them to complete more tasks using fewer devices. However, this practice introduces operational and security vulnerabilities.
By Matt van Doorn
In the mapping and GIS industries, mobile devices such as smart phones and tablets have a growing presence in the field; they enable businesses to work smarter and more efficiently. The Bring Your Own Device (BYOD) trend — essentially the use of commercial-grade devices for work purposes — will likely not slow down. BYOD is not without its pain points. Organizations face many security vulnerabilities when commercial-grade devices access critical data via corporate IT networks. Additionally, there are applications where a mobile device’s location capabilities are not accurate enough for GIS professionals to efficiently and effectively locate an asset and collect data.
Company IT departments have multiple options that control and monitor access to combat BYOD security issues; however these options do not resolve the accuracy issue. Traditional company-issued handheld integrated receivers for data collection are designed to meet accuracy demands in almost any physical environment condition. While these devices are the most appropriate technology option for some applications, they tend to be expensive for the positioning tasks where a smart phone or mobile device is “good enough.”
What to do when better accuracy on a mobile device is required, but it doesn’t make sense to invest thousands of dollars in a traditional receiver? With proper research, field professionals will find professional solutions that pair with consumer-grade smart devices to produce the requisite accuracy for a fraction of the cost of a traditional receiver.
Requirements and Accuracy
At a minimum, handheld receivers destined to work in conjunction with mobile devices must meet the following requirements:
The device must have moisture ingress protection to function properly in snow, ice, rain or dust environments.
The device must survive falls in hard terrain. It should have shock, drop and vibration protection.
The device must last the full workday for the professional to complete all workflows on a single battery charge.
Legacy company-owned receivers typically meet the requirements above and have had a long-term reputation for accurately providing positioning data. These devices are still the appropriate solution for environments where it does not make sense to take a smart device, such as a remote location in rough terrain where the smart device may not perform.
However, a smart device can in many cases enable the employee to be more efficient. Thanks to the accessory market, many of the above-listed requirements can be easily addressed. For example, smart-phone juice packs can fix the battery longevity issue; cases can protect against weather, shock or dropping; and screen covers can address the sunlight screen visibility issue. With a smart device in hand, GIS and mapping professionals not only have access to GPS data, but they are able to access and complete other work-related tasks from the same device such as email, internet access and voicemail. Plus, a smart phone is only a fraction of the cost of traditional receivers.
The most critical component that smart devices still cannot address is sub-meter accuracy, which many mapping and GIS professionals require to successfully do their job.
Accuracy Drives Cost. Mapping and GIS businesses are acutely aware of the efficiencies created by greater accuracy. With poor information, errors become increasingly costly. When robust, accurate data is collected, there is a direct correlation to improved workflows and operations. This allows professionals to be more strategic in ensuring that applications are effective and efficient across operations.
Aerial and satellite imagery made initial steps toward generating more accurate data collection, bringing mapping and GIS professionals to within a 50-centimeter range of the assets. Subsequently, high-speed lidar collection tools, designed to capture large areas at 5–10 cm accuracy, came to the market. While these tools significantly improved data collection, precise measurement typically requires more time, more expense and highly specific instruments in order to generate more data.
Today, handheld receivers can achieve high accuracy without using survey-grade tools, in applications that include:
Mapping: Any application, including locations, quantities, densities, specific areas and map change.
Aquatic monitoring
Buried utility infrastructure/cable location
Water/wastewater disposal
Location and elevation measurements: for example, elevation data on manholes or trunk lines.
Requirements vary across applications and industries. The mapping/GIS professional must determine the level of accuracy their workflow requires.
Accuracy Evaluation
A typical smart device, properly assisted, can achieve an accuracy range of up to 5–6 meters when used to locate an asset. In many cases this is good enough. To obtain positioning data, iOS devices use the application “Location Services,” which is available on multiple mobile platforms. Location Services enables location-based apps and other applications to use information from GPS and cellular and Wi-Fi networks to determine location information. The location provided by a hybrid system with cellular-assisted GPS (A-GPS) allows the device to identify location within a 5–6 meter range of an asset. Wi-Fi positioning alone can determine a location with an accuracy of about 74 meters, and cellular positioning alone offers about a 600-meter range for location, according to industry sources (www.windowscentral.com/gps-vs-agps-quick-tutorial).
However, cellular positioning can be limited when there is no network available. In remote or industrial settings, this could create difficulties in asset location. In water/wastewater, for example, when a GIS professional is in a ditch looking for a valve or a meter and there isn’t a network connection, the accuracy level provided without GPS may not be sufficient for that application. When A-GPS is not available due to a lack of cellular network, GIS professionals also have to deal with convergence time.
Another example involves searching for a manhole cover when the ground is covered by a couple feet of snow. In this case, the 5-6 meter range is quite large and could lead to a lot of time spent digging until the manhole is uncovered. This wastes time and energy, and leads to higher costs. Some receivers have the sub-meter capability and can provide the location data directly to the professional’s consumer-grade smart device through Bluetooth. By simply pairing the receiver with a cellphone, the GIS professional can quickly locate the asset, collect data and move on to the next task.
Accuracy Solutions
Location shortcomings in consumer-grade devices generally boil down to antenna performance. Consumer-grade smart devices are designed for exactly that: consumers. With antennas for Wi-Fi, Bluetooth and GPS built into the small device, there will be compromises in location accuracy. When location must be pinpointed, an integrated handheld receiver can enhance accuracy. Receivers are readily available with 12 channels parallel tracking. Some receivers can also support multiple satellite constellations, including GPS, GLONASS, Galileo, Beidou, and QZSS with up to 44 channels of parallel tracking. The accuracy of these devices is further supported by augmentation: WAAS, EGNOS, MSAS and GAGAN. These receivers can provide sub-meter accuracy, with asset location with as close as 60 centimeters. Some devices also support Virtual Reference Stations (VRS) and Trimble’s Real Time eXtended (RTX) correction service for sub-meter accuracy. Some RTX services achieve real-time sub-meter accuracy with IP and cellular connectivity, or over satellite L-band.
A receiver that integrates with the workflows of various mapping and GIS softwares as well as third-party applications will pair up nicely with a mobile device. The computations are all done for the professional, and will transmit signals via Bluetooth into the host devices using NMEA protocol. On iOS and Android devices, the location is available through the Location Services API. Third-party applications are also able to work with the receiver through consumer-grade devices that utilize the location services API. Some receivers are available across operating systems including iOS, Android and Windows, and are available to upgrade to the latest smart device whenever needed.
Important Device Attributes
Receivers designed to be compatible with a variety of smart devices can be shared among multiple devices. When it is time for a smart device upgrade, the new device can easily integrate with the receiver. Additional features that make these receivers especially convenient to use in the field include:
Small size: Mapping and GIS professionals don’t always have an extra hand available to carry an extra device. If it can fit in a vest, jacket pocket, pouch, clipped onto a belt, or pole mounted it will function in many scenarios.
Lightweight.
Rugged: Some receivers comply with MIL-STD-810 ruggedness with IP65 rating for shock, drop and vibration.
Battery life: for field performance for a full work day.
External antenna port: An accessory port for external data if the collecor needs to be mounted on top of a vehicle, or in a hard hat situation; a bonus feature worth consideration.
BYOD Trend and Limitations
The smart-device market will not cool down anytime soon. Gartner Research predicts that in 2015, almost 2.3 billion devices will be shipped worldwide. Whether these smart devices are provided by the company or truly BYOD, they will need to be augmented to effectively serve the applications they are intended to support. Solving the security issue can have a bearing on whether a company chooses to let employees use their own device or provide one; either way, enhancing the location capabilities of the device can be easily achieved with accurate receivers.
Matt van Doorn is a product management, product marketing, market management and business development professional at Trimble Navigation. He has years of experience in the data communication and telecommunication industry with deep knowledge of international markets.
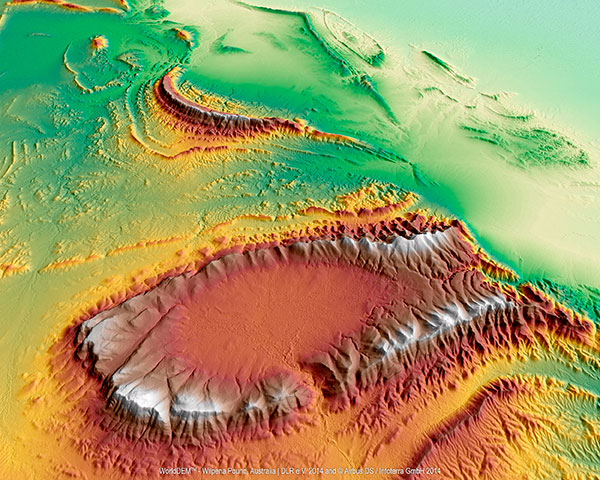
(WorldDEM image courtesy of Airbus Space & Defence)
Wilpena Pound, shown above, is a natural amphitheater of mountains in the heart of Flinders Ranges National Park in South Australia. Wilpena Pound is 17 kilometers long and 8 kilometers wide, covering an area of 100 kilometers. The highest peak is St. Mary Peak, at 1,170 meters.
The WorldDEM Digital Elevation Model of the Pound is based on data acquired by the German high-resolution radar satellites TerraSAR-X and TanDEM-X, which started synchronous data acquisition in December 2010 and completed coverage of the Earth’s entire landmass twice over in mid-2013. The satellites covered more complex terrain areas with a third and fourth acquisition campaign to ensure accuracy for the WorldDEM mapping database, a 3D global pole-to-pole digital elevation model distributed by Airbus Defence and Space.
Since its commercial launch in April 2014, WorldDEM has provided high-precision elevation models to a wide variety of industries. Mining studies in equatorial regions use it to analyze dense vegetation. It’s used for infrastructure corridor design and costing. Military and civil aviation use it for low-altitude flight path and landing-area planning for helicopters and aircraft in remote and difficult to access areas.
The database now covers large parts of North and South America, Western and Southern Africa, the Middle East, Australia, Northern Europe and Asia. The most recent additions include complete coverage of Scandinavia, Ukraine, Iran, Iraq, Angola and Saudi Arabia. In all, 80 million km² of WorldDEM data has been captured.
A new fourth edition of GPS Satellite and Surveying, by Leick, Rapoport and Tatarnikov, is available through NavtechGPS.
GPS Satellite and Surveying is a comprehensive guide on GPS technology for surveying. Three prior editions have established it as a definitive industry reference.
Updated and expanded to reflect the newest developments in the field, the fourth edition features cutting-edge information on GNSS antennas, precise point positioning, real-time relative positioning, lattice reduction and more. The authors — Alfred Leick, Lev Rapoport and Dmitry Tatarnikov — examine additional tools and applications, offering complete coverage of geodetic surveying using satellite technologies.
Trimble has introduced its next-generation Trimble Indoor Mobile Mapping Solution (TIMMS) that produces fast and accurate maps of difficult-to-navigate indoor spaces and translates them directly into 2D and 3D models of structured interiors.
TIMMS 2 is a fusion of technologies for capturing spatial data of indoor and other GNSS denied areas, the company said. It provides both lidar and spherical video, enabling the creation of accurate, real-life representations of interior spaces and all of their contents. The maps are geo-located, meaning that the real world positions of each area of the building and its contents are known and can be easily placed and oriented in a wide area model.
TIMMS 2 is smaller, lighter and more easily maneuverable than its predecessor. It can negotiate tight corners, closets and catwalks, and can be carried up and down staircases where no elevator is available for travel between building levels.
“The new Trimble Indoor Mobile Mapping Solution has been designed with greater emphasis on ease of use. It is very easy to maneuver, lift, ship and operate,” said Louis Nastro, director of Land Products at Applanix, a Trimble Company. “Our extensive experience with a broad range of projects with the previous generation TIMMS has led to a number of enhancements in data collection, processing and workflow management — making an indoor mapping project a seamless experience for users both pre- and post-mission. Whatever the building type and shape, TIMMS 2 can deliver exceptional results, both in accuracy and ease-of-use.”
Building on the success of the first-generation solution, TIMMS 2 also provides improved software workflow to manage the complete process from collection through post-processing to model production. Fully compatible with POSPac MMS, Applanix’ post-processing suite, TIMMS data can be presented in a variety of ways, including integration into Trimble Business Center and other infrastructure management or CAD packages.
Because of its increased efficiency, speed and ease-of-use, TIMMS 2 is an effective and high-productivity indoor mapping solution for buildings and facilities of all shapes and sizes, according to Trimble, including large or small areas, multi-level, industrial or commercial spaces. Users can obtain holistic 3D indoor geospatial views of all kinds of infrastructure including public buildings (government offices, schools, hospitals); industrial facilities (factories, warehouses); transportation hubs (airports, train stations); retail spaces (malls, concourses); entertainment venues (theatres, auditoriums, sound stages); and residential property (especially multi-occupancy high-rise buildings).
Maps and models of these spaces can be used for activities including revenue management and space planning; emergency preparedness and disaster planning; and historical building conservation and preservation. In addition, the base map provides a platform on which building owners and managers can serve location-based services.
Manufactured and sold by Applanix, TIMMS 2 indoor mobile mapping solution is available in the first quarter of 2016.
With a name like beast mode RTK it better be something pretty impressive. I think we are all looking for ways to become more productive and more efficient in the course of our fieldwork. I think the analogy could be made that beast mode RTK is to GNSS as what the EDM was to the steel tape.
Beast mode RTK is 5 Hz corrections coming from the base. While other receivers have advertised 5 Hz corrections for a long time they have not actually preformed at 5 Hz. The new Beast Mode from JAVAD GNSS actually preforms at 5 Hz. With typical RTK gps receivers an epoch is counted at 1 second which is 1 Hz corrections. With Beast Mode by JAVAD GNSS an epoch is only 0.2 seconds or 5 Hz corrections.
So, for those of you who typically measure your control and your property corners for 180 epochs, which is typically three minutes, now it will only take you 36 seconds with no discernible loss in accuracy or precision.
So what does Beast Mode from Javad GNSS actually mean to a surveyor? Beast Mode means that a surveyor can spend more time on quality control and less time just sitting there waiting to get a fix. For instance: With the combination of Beast Mode and Javad’s Cluster Average feature you can shoot in all of the property corners on a project, then shoot the property corners again one the way back. Once you have located all of the property corners (2 times in this scenario) you can use Cluster Average and average all shots that are within a user defined tolerance, giving increased relative precision for each individual point. All of this being done in less time than a typical RTK survey with increased relative precision and having redundancy to verify that all property corners are exactly where we say they are.
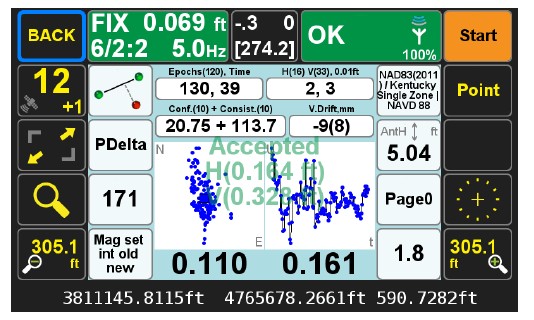
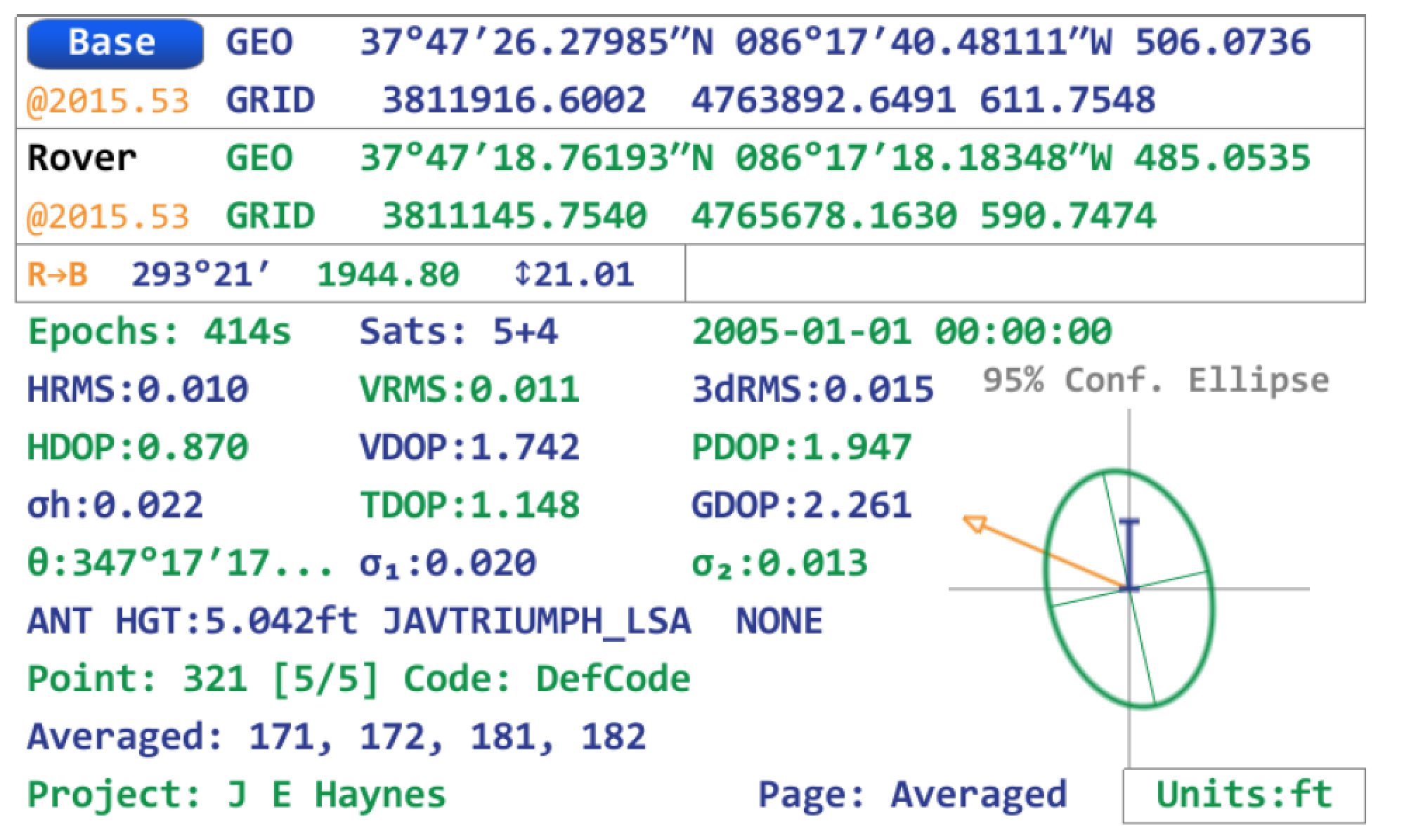
This is a screen shot of the Triumph LS running Beast Mode. You can see the epoch count on this shot is 130 epochs. Right beside the epoch count you will notice that it only took 39 seconds to get all 130 epochs. The 0.110 and 0.161 at the bottom of the screen is the peak to peak error over the 130 epochs for this one shot. The HRMS value of this shot is 0.02’.
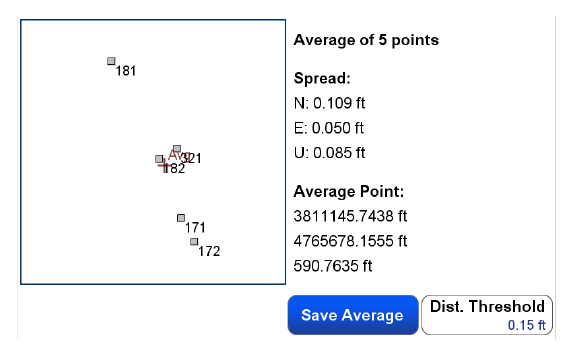
This is a screen shot after using cluster average. I located this same mag nail 4 times over the time span of two days. You can see in this screen shot that the overall spread or peak to peak error between all 4 points is 0.10 in the North and 0.05 in the east.
This is a detailed statistics screen shot of the averaged point. It gives a total number of epochs recorded with the overall RMS value. All of this information and more can all be exported in an HTML format for documentation. The redundancy of this point was completed in less time that could have been completed with any other receiver due to Beast Mode RTK from Javad GNSS. With all of this said, the bottom line is efficiency and redundancy. There is not another receiver on the market that allows for the efficiency and the redundancy that the Javad Triumph LS GPS receiver with Beast Mode RTK and Cluster Averaging offers.
For more information on JAVAD’s J-Field software, the Triumph LS or other JAVAD GNSS solutions please feel free to visit www.javad.com , email [email protected] or call 1-888-550-5301 or 1-408-770-1770.
Topcon Positioning Group announces cross-platform support for the MAGNET Construct app. The no-cost app is purpose built to drive the LN-100 Layout Navigator system and was initially released for the Android market. This “out of the box productivity” is now available for Apple devices as well.
“Whether you prefer Android devices or the latest Apple iPhone, iPad, or iPod Touch hardware, the free MAGNET Construct app offers intuitive options to wirelessly connect to and drive an LN-100 for fast as-built measurements as well as graphical guidance to your design data,” said David Ahl, director of software product management.
“It’s an example of our focus to provide more options that cater to the preferences of end-users,” said Ahl. “This cross-platform compatibility of the MAGNET Construct app makes entry-level precise measurement solutions for diverse 3D layout applications even more accessible.”
MAGNET Construct also offers secure connectivity to MAGNET Enterprise web services for real-time data exchange from active project sites to and from the office.
MAGNET Construct is currently available on both the Apple App Store as well as Google Play.
UNAVCO’s GAGE Facility includes more than 2,000 continuously operating GPS/GNSS reference stations around the world.
UNAVCO has selected Septentrio to be the preferred vendor of next-generation GNSS reference stations for the Geodesy Advancing Geosciences and EarthScope (GAGE) Facility. The Preferred Vendor status is valid through the duration of the GAGE Facility Cooperative Agreement with the National Science Foundation (NSF).
The selection of Septentrio was made following a rigorous competitive selection process. Under the agreement, Septentrio will supply GNSS reference stations to upgrade and expand the continuous GNSS reference station networks operated by UNAVCO.
UNAVCO is a non-profit university-governed consortium that facilitates geosciences research and education using geodesy. UNAVCO’s GAGE Facility includes more than 2,000 continuously operating GPS/GNSS reference stations around the world. UNAVCO-supported networks include EarthScope’s Plate Boundary Observatory (PBO), the Continuously Operating Caribbean GPS Observational Network (COCONet), the Trans-Boundary Land and Atmosphere Long-Term Observational and Collaboration Network (TLALOCNet) and the Polar Earth Observational Network (POLENet).
UNAVCO staff from Boulder, Colo., with three Septentrio staff near Septentrio’s headquarters in Torrance, Calif. Back row from left to right: Mo Kapila, Director of OEM Sales, Septentrio; Henry Berglund, Engineer, Development and Testing; Chuck Meertens, Director of Geodetic Data Services; Dave Mencin, Real Time GPS Manager; James Downing, Contracts and Permitting Manager; Jim Normandeau, Manager of Principal Investigator Project Support, Equipment, and Repairs; Warren Gallaher, Engineer, Development and Testing; and Neil Vancans, Vice President, Septentrio Americas. Front row from left to right: Freddy Blume, Manager, Development and Testing and Francesca Clemente, Manager, Technical Support, Septentrio. (Credit: Septentrio)
“This decision, following a highly competitive technical evaluation, is an important validation of Septentrio’s family of high-performance GNSS receivers,” said Neil Vancans, vice president, of Septentrio Americas. “Septentrio is firmly established as the preferred choice of receivers within the scientific and academic community for ionospheric observations, timing and other demanding applications, due to their superior multipath mitigation, resistance to ionospheric disturbance and in-band jamming. We look forward to working closely with UNAVCO to support its important mission of advancing geodetic science.”
“The critical technology in the new generation of reference station receivers is available in the Asterx 4 OEM boards, which also provide low and scalable power options. This technology is being extended across the full line of Septentrio products,” added Vancans.
“This Preferred Vendor relationship gives UNAVCO a unique opportunity to provide technical input during the ongoing development process of Septentrio’s next-generation PolaRx-series GNSS receivers,” said Frederick Blume, senior project manager for Development and Testing at UNAVCO.
Septentrio made the announcement during ION GNSS+, being held this week in Tampa, Fla.
Spectra Precision introduced at INTERGEO this week new and enhanced products in its portfolio of survey solutions. With the new additions, survey and construction professionals have more positioning instrument choices to meet their job requirements, the company said.
Spectra Precision made the announcement at INTERGEO 2015, the world’s largest conference on geodesy, geoinformatics and land management.
The new and enhanced products include:
Spectra Precision FOCUS 35 RX – A new range of motorized total stations providing high-speed, accuracy and precision in measurement. The FOCUS 35 RX robotic instrument moves the power of the observer from the instrument to the range pole, improving efficiency. The speed of observation and precise positioning of the FOCUS 35 RX Robotic Total Station is provided by patented StepDrive motion technology, which controls the horizontal and vertical motion of the motors, eliminating the need for traditional motion locks. The FOCUS 35 RX includes a tracking sensor that uses LockNGo FastTrack tracking technology, enabling the instrument to constantly lock onto the prism.
The FOCUS 35 RX is available in 2”, 3” or 5” accuracies, features market leading extended operating time with its dual battery system and is controlled externally by Spectra Precision Ranger, Nomad, or T41 data collectors running Spectra Precision Survey Pro or Spectra Precision Layout Pro field software on the Ranger or Nomad.
“The streamlined design, extremely light weight, very quick turning speed and exceptional battery life enhance the overall value-proposition of the FOCUS 35 RX and make this instrument a very compelling choice for a wide range of survey and construction applications,” said Olivier Casabianca, Spectra Precision Business Area Director. “With the introduction of the FOCUS 35 RX, Spectra Precision continues to expand and improve its portfolio with powerful solutions using new technologies.”
Spectra Precision Nomad 1050 Data Collector — The Nomad 900 has been updated with new features and capabilities. The Nomad 1050 has more RAM, more Flash and more speed. The base processor is now 1 GHz compared to 806 MHz on Nomad 900 and the Nomad 1050 has 512-MB RAM and 8GB flash storage. The other major enhancement is a new 3.75-G dual-mode GSM and CDMA WWAN modem to provide fast and versatile connectivity for Spectra Precision customers. Also, the new WWAN module uses an internal antenna eliminating the need for an external antenna.
Spectra Precision Survey Pro 5.7 Field Software — Constant improvement and enhancement continues with Survey Pro. Survey Pro version 5.7 contains significant changes to enable more productive field data collection. Included in this update are new map displays that enable viewing and managing most of the map features that are located on the main map display. The GNSS and robotic staking screens can also display a map view to include background maps along with the standard dynamic guidance control option. The GNSS offsets routine has been updated and now includes a distance-distance option. For those customers who wish to use GNSS and robotic simultaneously, there are now enhanced options for configuration and switching between modes.
Spectra Precision Survey Office v3.60 Software — Spectra Precision Survey Office now includes enhanced functionality; support for the Spectra Precision FOCUS DL-15 Digital Level and the import of leveling data from any DiNi level; least squares and 5 and 7 parameter Helmert transformations with reports; Geoid 12B support and grouping by country in the Coordinate System Manager; Point Cloud support plus many more additional enhancements.
Spectra Precision MobileMapper Field GIS Application for Android Devices — A new version of the popular MobileMapper Field GIS application now running on Android devices. This new software is dedicated to GIS data collection and focuses on simplicity to maximize the number of field personnel contributing to the geospatial business. Primarily for MobileMapper 300 users, the application will be the key component of Spectra Precision’s Bring Your Own Device (BYOD) solution. This makes it possible to pair Android tablets and/or smart phones with the MobileMapper 300 GNSS receiver to collect GIS data with survey-grade accuracy.
“With the introduction of these new and enhanced products into the Spectra Precision portfolio, survey and construction professionals have a wider range of economical choices to get the job done,” said Olivier Casabianca. “These new Spectra Precision optical products complement the ground-breaking line of Spectra Precision solutions, enabling Spectra Precision to offer a complete range of survey products.”
Applanix Corporation has announced the POS AVX 210, the latest addition to its airborne position and orientation portfolio for direct georeferencing of airborne mapping sensors. Using Applanix’ GNSS and inertial technology, the POS AVX 210 enables airborne surveyors to achieve gains in accuracy, efficiency and productivity for low-altitude or small form factor sensors, when compared to GNSS-only point-matching or aerial triangulation techniques.
The announcement was made at the INTERGEO 2015 conference and exhibition in Stuttgart, where Applanix is exhibiting in Hall 8, Booth C8.047.
For photogrammetric applications, the POS AVX 210 delivers highly accurate exterior orientation solutions — reducing the requirement for ground control in assisted aerial triangulation of digital single lens reflex (DSLR) or medium-format photogrammetric imagery. For low-altitude lidar applications, the POS AVX 210 provides the required precision and accuracy of direct georeferencing to enable users to generate point clouds for further refinement in adjustment software.
The POS AVX 210 is fully compatible with, and supported by, POSPac MMS, Applanix’ post-mission software for direct georeferencing of airborne mapping sensors. It is also features a seamless integration with the NanoTrack system from Track’Air, a leading commercial flight management system designed for highly efficient survey flight operations. Aircraft equipped with the POS AVX 210 and NanoTrack will be able to fly missions with reduced sidelap between flightlines, and a greatly reduced requirement for ground control points. These benefits can reduce costs and improve the efficiency of both data collection and the production of finished data sets for end users.
“With POS AVX 210, Applanix has answered a need in the marketplace for a small, compact system that enables efficient data gathering from low-cost yet highly effective sensors. These include DSLR and Medium format cameras, low-altitude lidar systems, and other systems,” said Joe Hutton, director of Inertial Technology and Airborne Products at Applanix.
POS AVX 210 consists of a single rugged enclosure containing a precision GNSS receiver and micro-electro-mechanical-system (MEMS) inertial sensors calibrated with the Applanix SmartCal technology, coupled with on-board data logging capability and interfaces for mapping sensors and flight management systems. POSPac MMS, available as an option with POS AVX 210, is a powerful GNSS-inertial processing software package that includes proprietary advanced capabilities such as the Applanix SmartBase virtual reference station, Applanix InFusion algorithms for increased productivity, and CalQC, a suite of data optimization and quality management tools.
“POS AVX 210 builds on the technological foundation of our established POS AV portfolio for large format sensors, and brings into play the innovations developed for our unmanned solutions. This combination of experience and innovation enables us to deliver a package that strikes the optimal balance between price and performance for this segment,” Hutton said.
POS AVX 210 is expected to be available in the first quarter of 2016 through Applanix’ airborne sales channels.