The agreement ensures Europe’s satellite-based augmentation continues enhancing navigation for aviation and other critical users and lowering emissions.
SES, a space solutions company, and the European Union Agency for the Space Programme (EUSPA) have announced an extension of the European Geostationary Navigation Overlay Service (EGNOS) GEO-1 satellite service agreement through 2030, with an option to extend until 2032, helping maintain high-precision navigation services for aviation and other critical users across Europe.
By improving the accuracy and integrity of satellite positioning signals, EGNOS supports aircraft in landing in low-visibility conditions, as well as planning more efficient routes, reducing fuel burn and CO₂ emissions.
At the core of the EGNOS service is Europe’s regional satellite-based augmentation system (SBAS) that improves the accuracy and reliability of GNSS signals, such as GPS. Beyond aviation, EGNOS supports maritime navigation and precision-driven agriculture, contributing to efficient operations and sustainability by reducing fuel consumption and emissions.
Under the extended GEO-1 contract, SES will continue operating an EGNOS-hosted payload on its SES-5 satellite, as well as the ground segment from its facilities in Europe.
“This extension ensures a robust EGNOS space segment, ready for the transition towards its next version and the development of new services, while safeguarding high-precision navigation for aviation and other critical users across Europe,” said Rodrigo da Costa, EUSPA executive director.
“EGNOS is a cornerstone of Europe’s aviation and broader navigation applications. The agreement underscores SES’ and EUSPA’s joint commitment to advancing satellite-based services that enable secure, reliable, and sustainable navigation solutions,” said Philippe Glaesener, senior vice president, Global Government at SES. “Thanks to the service, millions of users and operators will benefit from efficient and more reliable air transportation services across all of Europe. This commitment reflects our broader mission of delivering resilient satellite solutions for critical infrastructures.”
The European Union PAVE-SCAN project aims to build European GNSS-based and AI-driven technologies to detect and assess roadway pavement problems.
The proposed project aims for the development to market (TRL8-9) of European GNSS-based integrated low-cost sensor technologies and artificial-intelligence-driven open-architecture software solution — machine learning (ML) and machine vision (MV) — for the detection, classification and georeferencing of roadway pavement surface anomalies, and for the low-cost assessment of roadway pavements using participatory sensing.
The proposed system is of practical importance because it provides continuous information about roadway pavement surface anomalies — valuable for efficiently monitoring the transport infrastructure and for public safety. The vision for roadway condition assessment using smartphone-like technology is under the hypothesis that such technology can be used for crowd-sourced data collection and analysis in GIS-based pavement management systems (PMS).
“The developed technology and related transport informatics are disruptive technologies that have the potential to reshape the transport and infrastructure industries,” according to the project description.
Near-real-time analysis and classification of roadway anomalies
WP3,WP4,WP5
2
Geospatial mapping of transport infrastructure, roadway anomalies and condition-assessment heatmaps
WP3,WP4,WP5
3
Geospatial mapping of transport infrastructure, roadway anomalies and condition-assessment heatmaps
WP3,WP4,WP5
4
Improved roadway management practices, prioritisation of public works & lower costs
WP4
5
Reduction in the transport-related environmental footprint through improved O&M of transport infrastructure and of mass transit
WP4,WP6,WP7
6
Reduction in roadway-assessment costs by utilization of a fleet of vehicles/buses as participatory sensors
WP5,WP6,WP7
7
Integration with national transport initiatives (e.g., National Single Access Point), & with Digital Twin platforms, for dynamically updated roadway-condition models, and improvements in transport safety through roadway improvements
WP4, WP5
8
Open-access data and APIs
WP1, WP8
9
Product to market and ‘Product as a Service’ (PaaS) business model
The Coastal States of the Baltic Sea and the North Sea have published an open letter to the international maritime community insisting on the protection of GNSS-based navigtion. The countries point the finger squarely at the Russian Federation for causing disruption in both critical navigation and timing services for sea vessels.
“Modern maritime transport is fundamentally built on the reliability of satellite-based navigation,” reads the letter. “For over three decades, global shipping has advanced by developing vessel operations to increasingly depend on the position, timing and navigation data provided by satellite systems. This shift has brought great efficiency but has also created a new dependency.
The letter highlights the importance of GNSS as a critical safety requirement, not only ship navigation but also precise time synchronization vital for systems such as the Global Maritime Distress and Safety System (GMDSS).
Risks to the Automatic Identification System
Another GNSS service, the Automatic Identification System (AIS), plays a key role in traffic coordination, situational awareness and emergency response. “Spoofing or falsifying AIS data undermines maritime safety and security, increases the risk of accidents, and severely hampers rescue operations,” the letter states.
“We are now facing new emerging safety situations due to growing GNSS interference in European waters, particularly in the Baltic Sea region. These disturbances, originating from the Russian Federation, degrade the safety of international shipping. All vessels are at risk.”
The countries ask for cooperation developing alternative terrestrial radionavigation systems as a GNSS backup. They also want vessels crews properly trained to operate safely during navigation system outages.
“Maintaining trust in maritime navigation requires more than technology – it demands responsibility, transparency, and decisive action,” the letter states. “We must ensure that our seas remain safe, including when systems fail or face disturbances.”
The Federal Aviation Administration on Jan. 16 issued a warning to pilots to “exercise caution” when flying over the Pacific Ocean in parts of Latin America due to potential military activities. Areas cited include the eastern Pacific Ocean near Mexico, Central America and parts of South America.
A series of Notices to Airmen (NOTAMs) issued by the FAA state, “Potential risks exist for aircraft at all altitudes, including during overflight and the arrival and departure phases of flight.” The alerts are in effect for 60 days. NOTAMs are issued routinely in any region where there are hostilities nearby.
Firmware upgrade available for Xsens Sirius and Xsens Avior motion sensors delivers centimeter-level vertical displacement measurement for marine stabilization and control systems
Xsens has announced a major capability upgrade for its industrial-grade Xsens Sirius and Xsens Avior inertial measurement units (IMUs). The new Heave feature delivers centimeter-level vertical displacement measurement, enabling real-time stabilization and wave compensation in a wide range of marine applications.
Marine engineers can now access comprehensive motion data — roll, pitch, yaw and Heave — from a single compact sensor. This eliminates the need for external processing or for oversized tactical-grade systems while maintaining the precision required for offshore platforms, vessels, docking systems, marine robots, buoys and surveying equipment.
The Heave output operates at up to 100Hz, providing the real-time response needed in active stabilization and wave compensation systems. All processing happens on-device, simplifying system integration and reducing latency.
Xsens motion reference units (MRUs) — IMUs with Heave capability — deliver real-time Heave accuracy better than 5 cm for wave periods up to 29 s. This covers most marine applications. For longer wave periods up to 40 s, accuracy is approximately 6cm, twice the range supported by comparable industrial-grade MRUs.
“Engineers now get vertical displacement data directly onboard, alongside roll, pitch and yaw,” said Ayush Sharma, Algorithms Engineer at Movella. “This gives marine customers the complete motion reference they need for stabilization and compensation systems, without the size or certification overhead of tactical MRUs.”
The algorithm uses proprietary phase correction and bias estimation to mitigate the effect of drift over extended operating periods. Users can also define offset points — center of rotation (COR) and point of interest (POI) — ensuring that Heave values reflect the true motion of the vessel or payload, even when the MRU is installed away from the POI.
The Heave algorithm is available for download immediately as a firmware update for existing Xsens Sirius and Xsens Avior units in the field, with no hardware modifications required. All new units ship with the feature integrated. Heave output is enabled with a single setting in the MT Manager software or the Xsens software development kit (SDK).
Designed for straightforward integration
Xsens Avior is a compact OEM module for embedded system designs.
Xsens Sirius is a standalone MRU in a rugged IP68 housing for harsh environments. It meets MIL-STD-202 requirements.
Both products support RS-422, CAN, and UART interfaces. Development kits are available for prototyping, with free SDKs for C/C++, Python, ROS1, ROS2, and MATLAB. All units meet CE, FCC, and RoHS regulatory requirements, and are ITAR-free.
Xsens Avior and Xsens Sirius MRUs are available globally from Movella and authorized partners. For specifications, datasheets, and ordering information, visit www.movella.com/products/sensor-modules or contact a Movella sales representative.
Throughout the past several decades, GNSS has become one of the most significant technologies in modern engineering, supporting transportation, communications, finance, emergency response, and critical infrastructure [1]. Its precision, global reach, and reliability have enabled entire industries to scale in ways that would otherwise have been impossible. Yet as GNSS is used more deeply in autonomy-driven and safety-critical domains, the limitations of relying on a single-layer PNT architecture are becoming increasingly apparent.
Urban canyons degrade satellite geometry and tracking performance; intentional and unintentional interference is now commonplace [2]; spoofing has shifted from a theoretical concern to an operational reality; and indoor environments, which are essential for robotics, logistics, and emergency services, remain largely outside GNSS’s physical reach. These challenges are not shortcomings of GNSS itself. They reflect what the system was originally designed to provide: a globally available positioning and timing reference, not the entire resilience burden for every PNT-dependent application.
In parallel, communications technologies have undergone rapid transformation. The evolution from LTE to 5G, and soon to 6G, has introduced wider bandwidths, massive MIMO antenna arrays, improved network synchronization, and dense deployment across urban and indoor environments [3]. At the same time, LEO broadband constellations have matured into powerful satellite infrastructures capable of delivering strong signals, rapid Doppler dynamics, and frequent visibility. Although these systems were built primarily for data connectivity, their physical characteristics naturally lend themselves to positioning and timing.
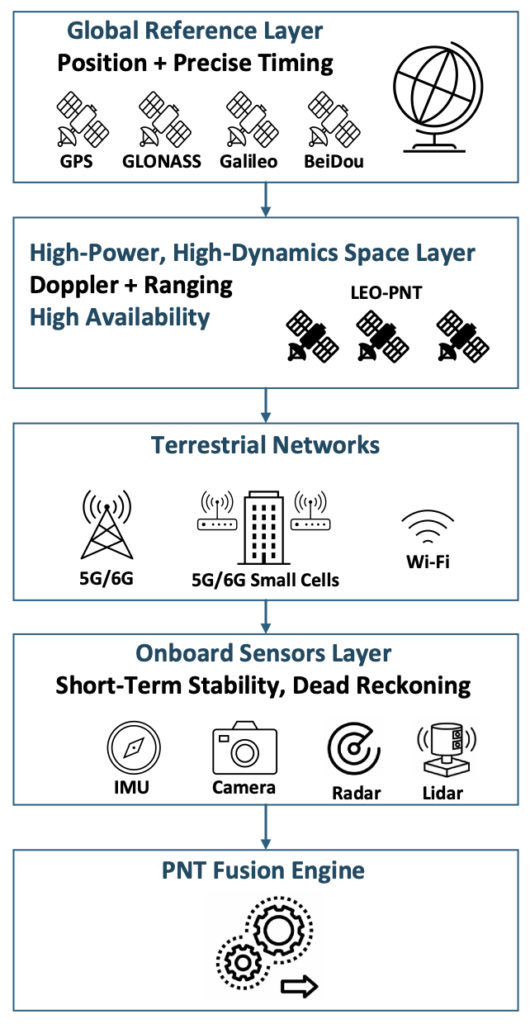
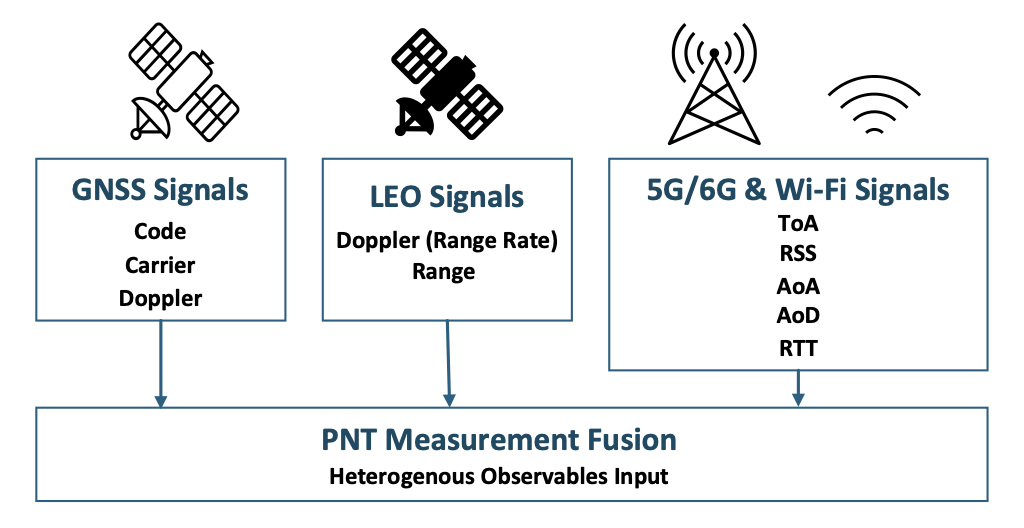
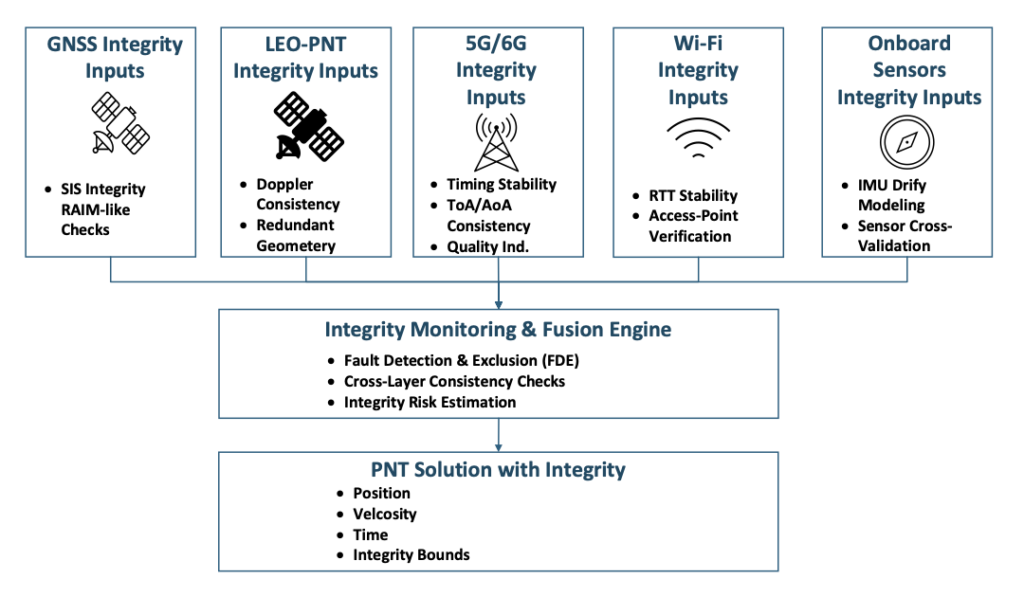
Taken together, these developments point toward a new direction for resilient PNT: a multi-layer architecture in which GNSS serves as the global reference layer and is complemented by high-power, high-dynamics LEO satellites, terrestrial 5G/6G networks and Wi-Fi systems, and a suite of onboard sensors that provide short-term stability and dead-reckoning capability. Figure 1 illustrates this emerging architecture and highlights how each layer contributes specific observables, coverage strengths, and levels of robustness. The remainder of this article examines the physical foundations of communications-based PNT, the role of LEO as an augmentation space segment, the engineering challenges inherent in multi-source navigation, and the system-level architecture that is now taking shape to deliver resilient and ubiquitous PNT.
Figure 1. Multi-layer architecture for resilient PNT. (All figures provided by the author)
2. 1 Growing Dependence on PNT and GNSS Vulnerability
Nearly every sector of modern life depends on GNSS-based positioning and timing. As reliance grows, exposure to GNSS limitations grows with it. Dense urban environments create severe multipath and signal blockage; jamming and spoofing incidents are now regularly reported near conflict zones and busy ports [4]; and autonomy concepts in aviation and ground mobility increasingly assume reliable PNT even when GNSS performance is degraded or unavailable.
GNSS will remain the global reference layer, but it was never intended to carry the full burden of these mission-critical demands on its own. A complementary set of technologies is needed, systems that continue to function in GNSS-challenged environments and provide redundancy when satellite signals are unavailable, corrupted, or intermittent.
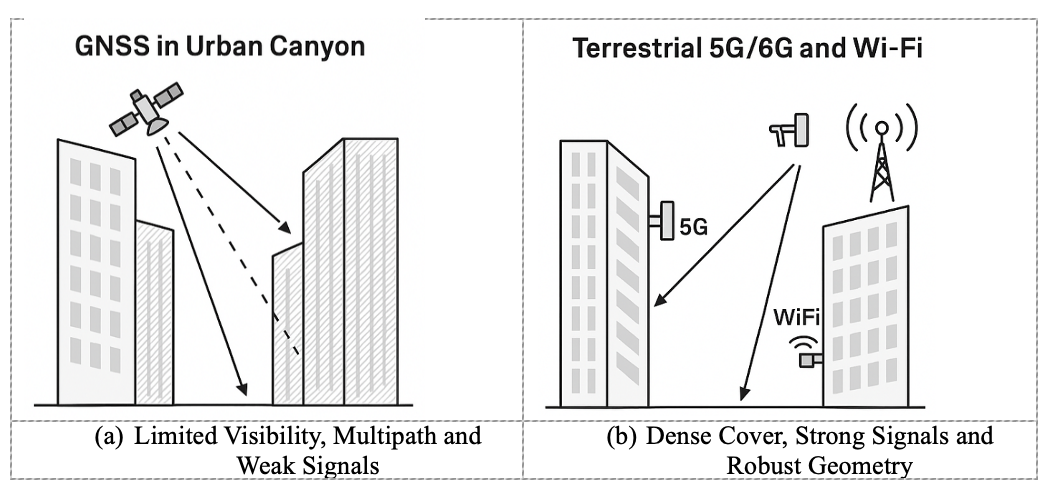
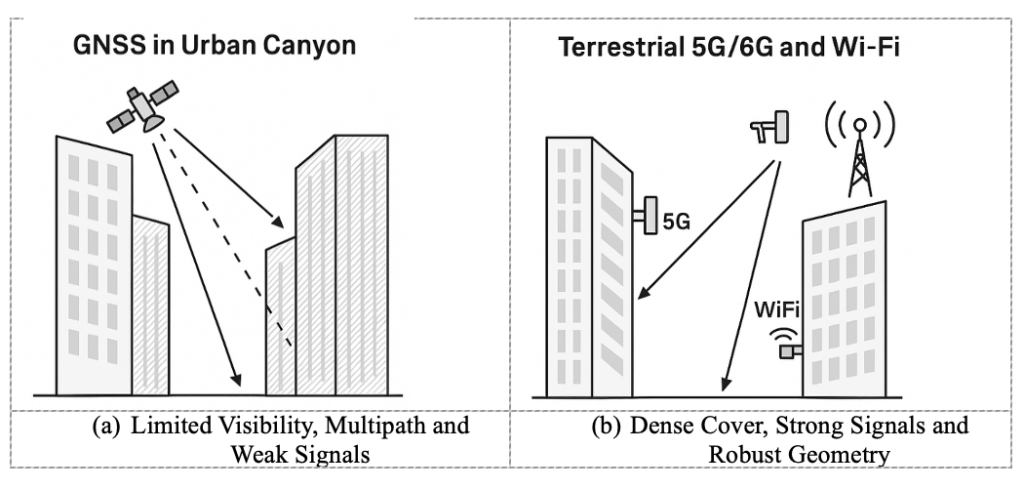
Error! Reference source not found. illustrates this challenge in a representative urban-canyon environment. Tall buildings restrict line-of-sight to GNSS satellites and generate strong multipath reflections, resulting in weak and unreliable signals (Figure 2a). By contrast, terrestrial networks such as 5G/6G and Wi-Fi maintain strong signal levels and robust geometry because their transmitters are embedded within the built environment, often only tens or hundreds of meters away (Figure 2b). This complementary coverage is a fundamental motivation for integrating communications signals into future PNT architectures.
Figure 2. Comparison of GNSS and terrestrial network coverage in urban canyons.
2.2 Communication Networks Have Quietly Become PNT-Capable
Modern communication networks have evolved far beyond their original purpose of data transport [5]. Several physical-layer characteristics now make 5G, Wi-Fi 7, and future 6G systems surprisingly well suited to PNT:
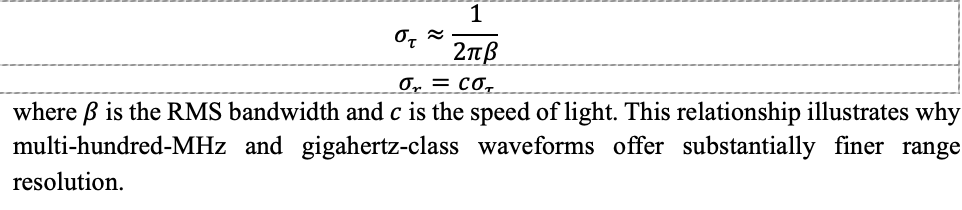
Wideband signals. Wi-Fi 7 supports 320-MHz channels and 5G FR2 offers up to 400 MHz, with multi-GHz bandwidths anticipated for 6G [6]. Wider bandwidth directly improves time-of-arrival (ToA) precision. The ToA uncertainty can be approximated by:
Massive MIMO. Multi-element antenna arrays estimate angle-of-arrival (AoA) and angle-of-departure (AoD), effectively turning base stations into spatial sensors capable of separating line-of-sight from multipath.
Dense deployment. Unlike GNSS satellites, orbiting at roughly 20,000 km, terrestrial networks are woven directly into the environment. Small cells and access points provide excellent geometry in exactly the locations where GNSS performance is weakest, including city centers, campuses, factories, and warehouses.
High signal power. Terrestrial signals arrive at the receiver tens of decibels stronger than GNSS, improving indoor penetration, acquisition speed, and robustness to interference.
These features were introduced to enhance connectivity, yet they collectively create an RF landscape that is inherently PNT-capable.
2.3 The Rise of LEO Constellations as a Complementary Space Layer
A third major driver behind communications-enabled PNT is the rapid proliferation of LEO satellite constellations. Broadband systems such as Starlink and OneWeb, together with several emerging PNT-dedicated LEO constellations, offer distinct advantages [7]:
Stronger received power. LEO satellites operate at altitudes of roughly 500–1,200 km, far closer than GNSS satellites at 20,000 km or higher, resulting in significantly stronger received signals.
Rapid Doppler dynamics. The relative motion of LEO satellites produces large, fast-varying Doppler shifts, which improve observability of user velocity and, over short intervals, position.
Large constellation sizes. Hundreds or thousands of satellites create rich geometry and frequent visibility, enhancing availability and resilience.
Although many LEO systems were designed primarily for communications, their signals can already be exploited opportunistically for positioning and timing. Purpose-built LEO-PNT systems extend these capabilities by offering wideband navigation signals, multi-frequency operation, and security features intended specifically for resilient PNT [7].
These characteristics make LEO a natural augmentation layer, strengthening GNSS performance and providing additional robustness in degraded, obstructed, or contested environments.
3. Technical Foundations of Communications-Based PNT
Modern communication and LEO satellite systems provide a diverse set of physical-layer measurements that can be fused with GNSS to create a resilient, multi-layer PNT solution. These observables go well beyond traditional GNSS code and carrier measurements and include Doppler, ranging, time-of-arrival, round-trip time, angle-of-arrival, angle-of-departure, and received signal strength. Figure 3 summarizes this heterogeneous measurement landscape and shows how each layer contributes distinct observables to the fusion engine.
Figure 3. PNT measurement diversity across GNSS, LEO-PNT, and terrestrial networks.
3.1 High-Resolution Ranging from Wideband Waveforms
Ranging accuracy is fundamentally linked to signal bandwidth. GNSS signals typically occupy 1–20 MHz, whereas modern communication waveforms may span hundreds of megahertz. Wider bandwidth enables finer temporal resolution, allowing receivers to separate closely spaced multipath components and improve time-of-arrival (ToA) precision [6].
In practice, Wi-Fi 7 and 5G FR2 waveforms can support sub-meter ranging in favorable conditions and substantially enhance relative positioning indoors and in dense urban environments. Techniques such as two-way ranging, cooperative localization, and inertial smoothing can extend performance even further. As shown in Error! Reference source not found., these wideband ToA and RTT observables form an essential input to the PNT measurement fusion layer.
3.2 Spatial Sensing with Massive MIMO
Massive MIMO arrays are one of the most powerful enablers of communications-based PNT. By comparing the phase and amplitude across many antenna elements, base stations estimate angles of arrival (AoA) and departure (AoD), turning terrestrial infrastructure into distributed RF sensor arrays [8].
Angle-based measurements offer several important benefits:
Improved localization geometry in 3D urban canyons
Ability to distinguish line-of-sight (LOS) from multipath
High update rates suitable for UAVs and advanced air mobility (AAM) platforms
A simplified Cramér–Rao lower bound (CRLB) illustrates how antenna geometry and signal power influence the accuracy of AoA estimation:
3.3 Infrastructure Density and Geometric Strength
From a PNT perspective, measurement geometry can be as important as measurement precision. Dense deployments of base stations, small cells, and access points give 5G, 6G, and Wi-Fi networks inherently strong geometric diversity, especially in environments where GNSS geometry collapses.
In indoor settings or street canyons, a receiver may have ten or more RF sources within a few hundred meters. This density improves dilution of precision (DOP), increases redundancy, and enables fallback positioning even when GNSS availability drops to zero. Within the multi-layer architecture described in Figure 1, terrestrial networks therefore provide crucial observability in GNSS-restricted environments.
3.4 High Signal Power and Robust Tracking
Terrestrial and LEO communication signals enjoy a link-budget advantage of roughly 50–100 dB over GNSS. This additional power yields several practical benefits:
Better performance with small or non-ideal antennas
Increased resilience to interference and jamming
Faster acquisition and re-acquisition after outages
More reliable tracking under fast dynamics or partial obstruction
In many scenarios, 5G, Wi-Fi, and LEO signals remain trackable long after GNSS signals fall below usable thresholds, providing essential continuity for navigation filters and multi-sensor fusion engines.
3.5 Timing and Synchronization in Communication Networks
Modern wireless networks rely on tight synchronization for scheduling, beamforming, and coordinated MIMO. They obtain timing from GNSS, fiber distribution, and packet-based protocols such as IEEE 1588 Precision Time Protocol (PTP) [9]. As these timing infrastructures mature, communication networks increasingly become timing providers rather than solely timing consumers.
Although terrestrial networks do not yet match the long-term stability of GNSS-disciplined oscillators, they provide valuable short-term holdover and regional timing continuity. These capabilities play an important role in multi-layer PNT systems, particularly during GNSS outages.
4. Engineering Challenges and Limitations
Although communications-based PNT provides powerful complementary capabilities, significant engineering challenges remain. These challenges do not diminish the value of multi-layer PNT; rather, they highlight the technical rigor required to deploy these systems reliably on a scale.
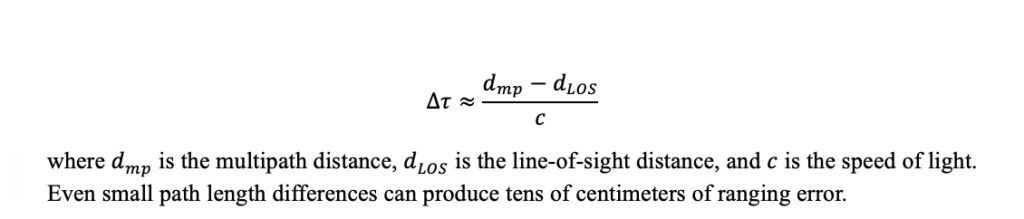
4.1 Multipath and Non-Line-of-Sight Propagation
For terrestrial PNT, multipath and non-LOS propagation remain the dominant contributors to ranging and angle errors. Buildings, vehicles, reflective indoor structures, and metallic industrial environments introduce secondary paths that bias ToA, RTT, AoA, and Doppler measurements. A simplified model of multipath-induced ToA bias is:
Massive MIMO beamforming, high-resolution channel estimation, and machine-learning LOS classifiers can mitigate these errors, but performance is highly environment-dependent and cannot be guaranteed in all cases. Figure 3, introduced earlier, highlights how diversity in measurement types helps reduce susceptibility to any single error mechanism.
4.2 Synchronization Constraints and Timing Drift
Communication networks require precise time alignment for scheduling, beamforming, and coordinated MIMO. However, network clocks do not yet match the long-term stability of GNSS-disciplined oscillators. Backhaul delay variability, oscillator drift, and partial GNSS visibility at base stations introduce timing uncertainty that must be explicitly modeled in a PNT fusion engine.
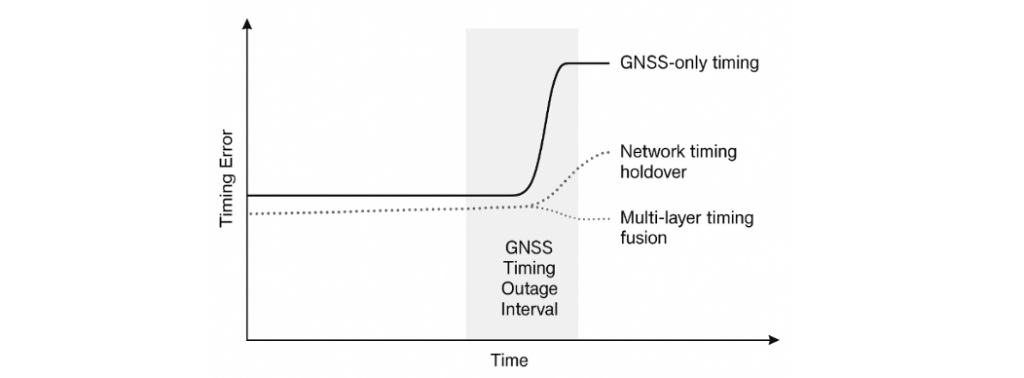
Figure 4 illustrates timing error growth during a GNSS outage, comparing:
GNSS-only timing, which diverges quickly without satellite visibility
Network timing holdover, which slows but does not halt drift
Multi-layer timing fusion, which maintains the lowest error accumulation
These behaviors demonstrate why communication-based timing is best used as a complementary layer rather than a standalone reference.
Figure 4. Timing error comparison during a GNSS timing outage.
4.3 Waveform and Structural Limitations
Modern communication waveforms such as OFDM were optimized for throughput and spectral efficiency, not navigation. Several characteristics constrain raw positioning performance:
Finite pilot density limits effective ranging bandwidth
High peak-to-average power ratio (PAPR) stresses nonlinear receivers
4.4 Coverage Variability and Regulatory Constraints
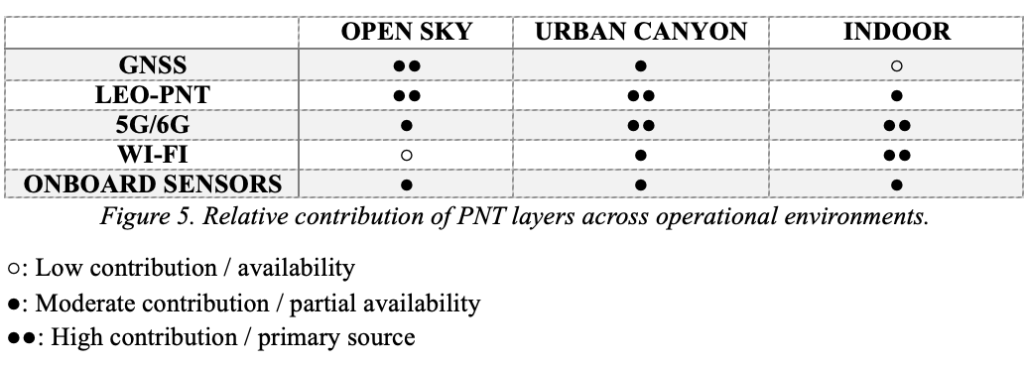
Terrestrial network density varies sharply by geography. Urban cores, industrial sites, and indoor campuses enjoy strong 5G/6G and Wi-Fi coverage, whereas rural, maritime, and mountainous regions may see limited improvements without LEO-PNT augmentation. Spectrum policy, privacy rules, and operator-controlled access to timing and positioning features further constrain how widely these capabilities can be exposed. Figure 5 summarizes the relative contribution of each PNT layer—GNSS, LEO-PNT, terrestrial networks, and onboard sensors—across open-sky, urban, and indoor environments.
Figure 5. Relative contribution of PNT layers across operational environments.
4.5 Security and integrity
As communication signals begin supporting navigation functions, they must meet higher standards for robustness, integrity, and security. PNT observables are vulnerable to spoofing, replay, meaconing and cyber-attacks on timing sources [10]. GNSS experience demonstrates the value of:
Cross-layer consistency checks
Cryptographic authentication
Fault detection and exclusion (FDE)
Monitoring for anomalies in Doppler, timing, or angle domains
Redundancy across multiple constellations and layers.
These functions are visualized in Figure 6, which illustrates how a multi-layer PNT system performs integrity monitoring across heterogeneous measurements.
5. A Multi-Layer Architecture for Future PNT
The earlier sections described why GNSS alone cannot meet emerging PNT requirements and how communications and LEO signals provide new sources of observability. Building on those foundations, Figure 1 introduces a multi-layer architecture in which GNSS, LEO-PNT, terrestrial networks, and onboard sensors cooperate to deliver resilient positioning and timing. This section outlines the role of each layer and how they integrate into a unified system.
5.1 GNSS as the Foundational Global Layer
GNSS will continue to provide the global reference frame, absolute positioning, and precise timing that anchor the entire architecture. Its worldwide availability, mature error modeling, and extensive user base make it the natural reference for other layers to align with whenever GNSS is available and reliable. In this sense, GNSS remains the “truth model” for time and coordinates, even as additional layers enhance resilience.
5.2 LEO-PNT as the High-Power, High-Dynamics Space Layer
LEO satellites provide diversity in orbit, signal power, geometry, and dynamics. Their lower altitude results in significantly stronger signals and rapid Doppler variations that improve motion observability. These characteristics reinforce GNSS performance in interference, urban canyon, and high-dynamics environments. As shown in Figure 3, LEO adds Doppler-based range-rate observables that are particularly valuable for maintaining continuity when GNSS quality fluctuates.
5.3 Terrestrial Networks as the Urban and Indoor Layer
5G, Wi-Fi 7, and future 6G networks form the densest PNT-capable infrastructure ever deployed. Their wideband signals, massive MIMO arrays, and strong received power position them as the dominant layer for indoor and urban navigation. Where GNSS geometry collapses, terrestrial networks provide ToA, AoA, AoD, RTT, and coverage exactly where users most often need it. Figure 5 highlights how their contribution becomes primary indoors and highly complementary in urban canyons.
5.4 Onboard Sensors and Local References
IMUs, odometry, barometers, cameras, radar, and lidar provide short-term stability and immediate awareness of the immediate environment, independent of external RF conditions. These sensors bridge outages and reduce reliance on any single external signal source. Their role within architecture mirrors their role in autonomy today: providing the continuity needed when GNSS, LEO, or terrestrial signals fluctuate. Together with RF observables, they form a robust solution space consistent with the measurement diversity shown in Figure 3.
5.5 Fusion, Standards, and System Engineering
Realizing a multi-layer PNT system is fundamentally a system-engineering effort. Success depends on:
Common timing and reference frameworks across GNSS, LEO, and terrestrial layers
Standardized quality indicators and integrity metrics
Interfaces that expose PNT-relevant observables from communication networks while respecting privacy and operational constraints
Cross-layer consistency checks that ensure no single measurement dominates unchecked
Standards bodies, including 3GPP, IEEE and aviation authorities, are beginning to address these needs, but operationalizing multi-layer PNT at scale will require continued collaboration across industries. Figure 6 illustrates how integrity information from each layer contributes to fault detection, cross-checking, and integrity-bound estimation within the fusion engine.
Figure 6. Integrity monitoring in multi-layer PNT architecture.
6. Conclusion
The era of single-layer PNT is coming to an end. As reliance on precise positioning and timing accelerates across aviation, ground autonomy, critical infrastructure, and networked systems, GNSS alone cannot shoulder the growing resilience burden. Fortunately, a rich set of complementary technologies already surrounds us. Dense terrestrial networks, emerging LEO constellations, and increasingly capable onboard sensors provide observables that naturally augment GNSS and extend PNT into environments where satellite signals struggle.
The opportunity now is to treat communications and PNT not as separate domains but as elements of a unified system. A multi-layer architecture — such as the one outlined in this article — offers stronger availability, improved measurement diversity, and inherent resilience against interference, outages, and environmental constraints. The key challenge ahead lies not in inventing new signals, but in system engineering: establishing shared timing frameworks, standardizing measurement interfaces, ensuring integrity across heterogeneous sources, and building trust in signals not originally designed for navigation.
Most of the technical ingredients are already in place. The next decade will determine how effectively industry, government, research institutions, and standards bodies can integrate them into certifiable, interoperable, and widely deployable solutions. If successful, multi-layer PNT will become a foundational capability — providing trustworthy positioning and timing wherever future autonomous systems, vehicles, and critical infrastructure require it.
Innoviz Technologies, a Tier-1 direct supplier of automotive-grade lidar sensor platforms and software stacks, is demonstrating its fully colored long-range lidar with camera at CES 2026 this week in Las Vegas.
The InnovizThree creates a compact sensor-fusion module designed to significantly reduce OEM integration complexity. The solution combines lidar and RGB sensing in a single compact perception module, purpose-built for behind-the-windshield installations, drones, micro-robotics and humanoids.
The consolidation of an RGB camera inside InnovizThree reinforces Innoviz’s commitment to scalable, OEM-friendly sensor-fusion perception solutions designed for series production and long-term deployment with the potential to enable faster deployment and cost saving.
The RGB sensing capabilities are factory-aligned with the lidar, with an ability to ensure precise and consistent visual-to-lidar geometry across production units. This alignment, combined with hardware-synchronized capture, will enable reliable multi-modal sensor-fusion data correlation while reducing calibration effort during vehicle integration., the company said.
Delivered through a single integration interface, the solution will minimize wiring, interfaces, and system complexity. This approach will reduce the overall integration burden for OEMs, which is expected to enable simpler validation processes, optimized engineering effort, lower cost and faster time-to-production.
Greece now has its own internet of things (IoT) nano satellite in space, the MICE-1 (Maritime Identification and Communications systEm). MICE-1 was launched Nov. 28 aboard a Falcon 9 rocket from Vandenberg Space Force Base in California, as part of the Transporter-15 mission by SpaceX.
MICE-1 is the first Greek nanosatellite specifically designed for maritime and IoT communication applications. Developed at the Prisma Electronics facilities in Alexandroupolis, it aims to bring Greek shipping — and critical operational infrastructures in natural disaster scenarios — closer to the capabilities of space.
MICE-1 will collect and process shipping and environmental data in real time using artificial intelligence and advanced encryption techniques to ensure secure data transmission and analysis. It also paves the way for Greece’s presence in the field of space applications.
With real-time data collection and secure, two-way communication, MICE-1 contributes to reducing environmental footprint and promoting green technologies in shipping.
MICE-1 is a 3U CubeSat nanosatellite equipped with an AIS receiver to record, identify and track ship signals, as well as an S-band IoT communication system. The satellite’s objective is to establish direct communication with ships equipped with LAROS technology — Prisma Electronics’ innovative platform that facilitates the operational monitoring and optimisation of ocean-going vessels.
MICE-1 enables LAROS to leverage the capabilities of space, providing new tools for sustainable and efficient shipping. The company will also use the nanosatellite to optimize and evaluate the artificial intelligence algorithms it has developed, with the aim of assessing functionality impairment, predicting behaviour and managing telemetry in line with high cybersecurity standards.
A team of specialized engineers from Prisma Electronics participated in development of the nanosatellite in close collaboration with the European Space Agency. Operation of the main ground station was supported in collaboration with Democritus University of Thrace.
To meet the requirements of the mission, Prisma Electronics collaborated with international partners in the space sector, including SpaceX, Exolaunch, EnduroSat and IC-Space.
Prisma Electronics is already planning the next phase: the development of a comprehensive satellite IoT network for use in shipping, environmental monitoring and civil protection. The MICE-1 mission demonstrates that Greece is not just observing international space developments, but actively contributing to shaping them.
Carried out under the supervision of the European Space Agency (ESA), the mission is part of the Ministry of Digital Governance’s national IOD/IOV CubeSat nanosatellite programme, which forms part of the Greece 2.0 initiative. This programme is funded by the European Union’s Recovery and Resilience Facility (RRF).
Swift Navigation is collaborating with Nvidia to enable a more scalable, cost-effective approach to autonomous driving by integrating the Nvidia Drive AGX platform with Swift’s globally referenced, centimeter-accurate GNSS positioning.
Swift Navigation offloads absolute localization to the GNSS sensor stack using its Swift Automotive Suite. The suite is a complete, modular software solution for safe, high-integrity precise vehicle localization that combines the centimeter-level Skylark Precise Positioning Service with the Starling positioning engine, software that fuses raw GNSS data and corrections with inertial sensors (IMU) and wheel odometry to deliver high-integrity, centimeter-accurate positioning (PVT).
By entrusting lane-level positioning to Swift’s high-precision stack, the vehicle’s optical sensors are relieved of the absolute positioning burden. This allows the perception stack to be optimized for obstacle detection and immediate safety, significantly reducing overall system cost and complexity.
Integration with Nvidia Drive AG
The integration is delivered through the Starling SAL Plugin for Nvidia DriveWorks. The Nvidia Drive AGX platform is the industry-standard, end-to-end platform for software-defined vehicles, scaling from assisted to fully autonomous operation. DriveWorks, its comprehensive SDK, provides a unified sensor abstraction layer (SAL) for seamless ingestion of data from all sensor types.
Swift’s new plugin acts as a drop-in component within this architecture. Sitting between the vehicle’s raw GNSS sensors and higher-layer software, such as that for localization, the plugin invisibly handles the complex mathematics of GNSS corrections and sensor fusion, outputting a clean, corrected position stream directly into the standard DriveWorks interface.
“We are removing the single biggest hurdle to widespread autonomy: the complexity and cost of localization,” said Holger Ippach, EVP of Product and Marketing at Swift Navigation. “By delivering Starling’s natively integrated, high-integrity GNSS to Nvidia DriveWorks, we are giving OEMs a direct path to globally referenced, lane-level positioning that is simple, scalable, and affordable.”
The collaboration and the Starling SAL Plugin unlock several advantages for automotive OEMs leveraging the Nvidia Drive platform:
Cloud-native ASIL safety. Skylark is an ASIL-certified positioning service built entirely in the cloud, offering scalability and reliability at a lower cost than solutions reliant on physical data centers.
Comprehensive sensor fusion. The Starling Positioning Engine delivers robust, high-integrity positioning by fusing precise GNSS with IMU and wheel odometry, ensuring continuous, lane-level accuracy even in signal-challenged environments.
Plug-and-play precision. Developers no longer need to build localization stacks from scratch. High precision is toggled on simply by adding the Starling plugin to the DriveWorks configuration.
Hardware independence. Because Starling is software-defined, Nvidia customers can achieve high performance using a wide variety of mass-market GNSS receivers, rather than being locked into expensive, proprietary navigation units.
Pre-validated integration. The Starling plugin has been rigorously tested and validated within the DriveWorks environment. This eliminates the complex, months-long burden of validating custom sensor drivers and fusion algorithms, allowing engineering teams to focus immediately on high-level path planning and control.
The Starling SAL Plugin for Nvidia DriveWorks is available now.
Quectel Wireless Solutions has launched a 5G-advanced (5G-A) automotive-grade cellular module, the AR588MA. The module integrates dual-band GNSS supporting both L1 and L5 bands with up to 30 Hz output.
Based on MediaTek’s latest-generation MT2739 platform, the AR588MA supports 5G-A communication technology and complies with the 3GPP R18 standard protocol. It features both NB-NTN and NR-NTN satellite communication capabilities and supports dual-SIM dual-active (DSDA) technology, offering improved stability and reliability on cellular connections. It also includes intelligent driving scenario recognition.
Designed in compliance with the AEC-Q104 Grade 2 automotive standard, it delivers fast, stable connectivity and reliable security for in-vehicle communication and benefits on-roof applications, like smart antennas for automotive, with higher temperature support.
Hexagon has joined the Multilateral Memorandum of Understanding (MMoU) on Strengthening the Global Geodesy Supply Chain.
The MMOU is a shared recognition by the United Nations Global Geodetic Centre of Excellence (UN-GGCE) — alongside member state government departments and agencies, private sector companies, organizations, associations, and academic institutions — that action is required to make the foundations of positioning, navigation and timing services robust.
With HxGN SmartNet, Hexagon has built a reliable, scalable GNSS infrastructure that integrates physical reference stations, specialized software such as Leica Spider, and a secure environment for distributing precise positioning data. Supporting tens of thousands of users worldwide, SmartNet delivers the accuracy and continuity essential for daily operations across many sectors.
The MMoU signatories hope to advance resilient positioning services and strengthen geospatial capabilities for nations around the world. Through joint initiatives, they aim to:
Enhance continuity and accuracy of GNSS-based positioning services
Strengthen resilience against signal interference
Support countries in developing and maintaining geodetic infrastructure
Expand education and workforce development in geodesy.
These initiatives ultimately help end users access more consistent accuracy, higher service availability, and stronger resilience against jamming or spoofing.
The MMoU was signed by Henning Sandfort, president, Geosystems Business Area, Hexagon, and Dieter Fritsch, Hexagon’s representative to the UN-GGIM Private Sector Network, on Nov. 17.
“Joining the MMoU underscores our commitment to ensuring that accurate, dependable geospatial information is accessible to governments and organisations worldwide,” Sandfort said.
“Hexagon’s contribution under the MMoU demonstrates the importance of global collaboration between Member States, UN and the geospatial industry,” said Nicholas Brown, head of Office at the UN-GGCE. “Hexagon is a key player of GNSS technology and digital reality solutions and therefore mostly welcomed to contribute the future vision of a strengthened global geodesy supply chain.
CPI Electron Device Business – TMD Technologies Division has successfully completed sea trials of its cquantum-hybrid inertial navigation system (INS) aboard the THV Galatea, operated by Trinity House, the General Lighthouse Authority for England, Wales, the Channel Islands and Gibraltar.
This milestone shows that quantum-enabled sensing hardware can operate stably in maritime conditions, with the potential to provide resilient positioning without continuous reliance on GNSS.
Research indicates that a 24-hour GNSS outage could cost the UK economy £1.4 billion through cascading effects on logistics, transportation and critical infrastructure, underscoring the need for GNSS-independent solutions. By proving that quantum sensors can operate in operational conditions aboard a working vessel, CPI TMD is advancing technologies that reduce reliance on satellite navigation and improve resilience across maritime, defense and commercial sectors.
The Harlequin System: Quantum-Enhanced INS
The Harlequin system is a quantum-classical hybrid INS designed to extend GNSS holdover — the ability to maintain accurate position when satellite signals are unavailable or unreliable. Developed under an Innovate UK funded project, with partners from industry and academia, including the University of Strathclyde, and Joseph Cotter’s group at Imperial College London, Harlequin integrates classic INS components (a precise clock, a ring laser gyroscope, and a MEMS accelerometer) with CPI TMD’s gMOT-based quantum accelerometer.
Onboard team for the sea trial. (Photo: CPI TMD)
The gMOT cold atom source, developed by CPI TMD, the University of Strathclyde and Kelvin Nanotechnology, is a grating-based magneto-optical trap that provides a source of ultra-cold atoms that forms the basis of a portable, rugged quantum sensor.
Conventional INS technology accumulates errors over time, causing position estimates to drift. By integrating its cold-atom accelerometer technology with classical INS technology, Harlequin leverages quantum-enhanced sensing to perform periodic drift corrections, extending the period over which a vessel can maintain accurate position in the absence of satellite-derived timing and positioning.
Real-world trials: Operating around a working vessel
The Harlequin trial demonstrates that quantum sensors can operate reliably outside the lab, functioning in the harsh conditions of real-world maritime operations—a crucial validation step toward field-deployable systems.
The sea trial took place aboard the THV Galatea, which is not a scientific test vessel but an operational ship with a demanding day job: keeping shipping routes safe by ensuring buoys and lights are correctly placed and maintained, surveying the seabed for hazards, marking wrecks, and supporting marine-infrastructure projects such as cables and pipelines.
The Harlequin system had to be loaded, tested and unloaded around the Galatea’s regular operational schedule, adding complexity to the trial and underscoring the system’s ability to integrate into real-world maritime workflows.
Next Steps: System Upgrades and Second Trial
Data gathered during the trial will inform a program of system upgrades aimed at improving performance and enhancing suitability for long-term shipboard operation. A second field trial is planned for the end of 2026 to validate improvements and bring it closer to operational readiness.