The Piksi Multi GNSS receiver. (Photo: Swift Navigation)
Swift Navigation has upgraded the firmware to its flagship product — the Piksi Multi GNSS receiver. This marks the sixth major release to Piksi Multi since it was launched in February 2017.
The upgrade is available free of charge to Swift customers.
The firmware release also enhances Duro, the ruggedized version of the Piksi Multi receiver housed in a military-grade, weatherproof enclosure for long-term outdoor deployments.
Swift Navigation is a San Francisco-based tech firm building centimeter-accurate GNSS technology and a cloud-based corrections service to power a world of autonomous vehicles, the company said.
The Duro enclosure. (Photo: Swift Navigation)
Firmware Release 2.0 for Piksi Multi and Duro supports two additional major satellite constellations — the Chinese constellation (BeiDou B1/B2) which, once completed, will contain 37 satellites and the European Union-based constellation (Galileo E1/E5b), which will eventually consist of 30 satellites.
Adding to the existing GPS, GLONASS and SBAS constellations already supported by Swift’s GNSS receivers means that users will have more access and visibility from satellite systems across the globe.
Piksi Multi’s performance will further improve over time as the total of 136 satellites planned for these major constellations are fully deployed.
The addition of BeiDou and Galileo constellations creates more robust positioning performance in a variety of challenging skyview environments and puts Piksi Multi on par with leading industry receivers costing up to ten times a much.
With this 2.0 release, Piksi Multi is feature-complete, and Swift’s engineering team has delivered on planned product features on the Piksi Multi Product Summary.
MSM Messages 4-7. The new firmware adds support for RTCM 3.2 Multi Signal Messages (MSM). Though Swift devices already support RTCM 3.1, the addition of MSM allows for another flavor of differential corrections supported by BeiDou and Galileo, while also supporting both GPS and GLONASS with MSM new messages. MSM also allows for interoperability with other existing third-party GNSS receivers for all modern signals and constellations.
Fix Improvements. Firmware 2.0 provides Piksi Multi and Duro improvements on fixing in long base lines in poor atmospheric conditions, making the devices more resilient to Ionospheric effects during periods of high Ionospheric activity.
Higher Baud Rate Support for UART. New baud rates were added including 460800 and 921600.
Acquisition Improvements. Enhancements made allow Piksi Multi and Duro to power on to a usable signal more quickly and acquire satellites in start-up mode faster, by several seconds.
“The growing Swift engineering team has been hard at work developing Piksi Multi to its full potential,” said Samir Kapoor, executive vice president of engineering and product at Swift Navigation. “With support for all modern satellite constellations and multiple performance improvements, Piksi Multi offers unmatched affordability, priced at ten times the savings yet on par with other leading GNSS receivers.”
“Swift’s vision of making GNSS devices that are centimeter-accurate, with fast RTK convergence times and robust positioning performance all at highly-competitive prices has come to fruition,” Kapoor said. “With Piksi Multi feature complete, we look forward to adding to our line of products with additional offerings later this year.”
Rohde & Schwarz has expanded the capabilities of its R&S CMW500 wideband radio communication tester and R&S SMBV100A GNSS simulator to support Global Certification Forum (GCF) protocol conformance tests for C-V2X device certification.
Utilizing the Qualcomm 9150 C-V2X chipset solution from Qualcomm Technologies Inc., a subsidiary of Qualcomm Incorporated, the R&S CMW500 acting as LTE network simulator now allows automakers to test C-V2X direct communications (PC5) according to GCF Work Item 281.
3GPP Release 14 specifies the direct communications specifications for C-V2X PC5, which enables vehicle-to-vehicle (V2V), vehicle-to-pedestrian (V2P) and vehicle-to-infrastructure (V2I) safety applications, and does so without a mobile cellular subscription or network assistance and operates in ITS bands 46D (5.8 GHz) and 47 (5.9 GHz).
The new R&S CMW-KK550 test package includes the 3GPP Protocol Conformance tests from LTE-V2V GCF Work Item 281 and LTE-V2X GCF Work Item 282. As recently announced, the R&S CMW-KU514 C-V2X software package on the R&S CMW500 is used to verify data transmission and reception over the PC5 interface in ideal, faded and congested channel conditions. Together, both packages enable Rohde & Schwarz to support C-V2X device testing through all protocol layers.
C-V2X device testing is a significant step towards achieving the goal of having fully connected and autonomous vehicles to improve public safety and increase traffic efficiency.
C-V2X, including direct communications for safety applications, nicely and synergistically complements network-based communications that deliver telematics services and various use cases for connected infotainment and over-the-air software updates.
“C-V2X PC5 radio technology has quickly advanced to a pre-commercial stage, and Rohde & Schwarz is pleased to be the first test equipment vendor to offer a comprehensive C-V2X test suite,” said Anton Messmer, vice president of mobile radio testers at Rohde & Schwarz. “The automobile industry can now verify functionality and performance of C-V2X devices, as well as start device testing as per 3GPP protocol conformance tests.”
“This expanded capability complements our support for European eCall and shows our long-standing support for automotive applications,” Messmer said. “Rohde & Schwarz is committed to providing industry-leading test platforms for C-V2X device performance testing and GCF device certification.”
Airgain Inc. has released its Multimax FV 6-in-1 and 5-in-1 antennas.
The compact Multimax FV family is available in a range of configurations, supporting multi-constellation GNSS. The antennas also support up to dual MIMO LTE (including Band 14 for the FirstNet public safety network), 3×3 MIMO Wi-Fi or 2×2 MIMO Wi-Fi.
Airgain is a provider of advanced antenna technologies used to enable high-performance wireless networking across a broad range of devices and markets, including connected home, enterprise, automotive and internet of things.
With a small footprint and a strong, bolt-mount aluminum base, the Multimax FV family provides protection against natural hazards threatening vehicles, including vibration, ice, salt, car washes and tree sweeps.
In addition, the elegant shark-fin design allows fleet owners to add style to their vehicles without compromising performance.
The new products include high-gain antennas that deliver a larger cellular footprint alongside high rejection GNSS technology with coverage for multiple satellite systems including GPS, GLONASS, Galileo and BeiDou.
“Not only does reliable connectivity matter to fleet owners, but also aesthetics and the antenna form factor,” said Reed Pangborn, Airgain’s vice president of Channel Sales for North America. “Our new Multimax FV family is uniquely designed to deliver in each of these key areas. Owners can rely on our commitment to providing class-leading performance across cellular, Wi-Fi and GNSS as well as our industry-best reliability, but all built into a new, sleeker design that complements today’s fleet vehicles.”
The Multimax FV family of antennas can be ordered in either black or white and are available now.
The commuter rail industry is making progress installing and implementing positive train control (PTC), according to an analysis by the American Public Transportation Association (APTA), an advocate for the advancement of public transportation programs and initiatives in the United States.
The advancements reflect the commuter rail industry’s commitment to safety and implementing PTC by the Dec. 31 statutory deadline, APTA said in a statement.
PTC is a complex signaling and communications technology that commuter rail agencies are installing to offer a critical safety overlay on top of an already safe industry. In fact, rail is the safest surface transportation mode and traveling by commuter rail or intercity rail is 18 times safer than traveling by automobile.
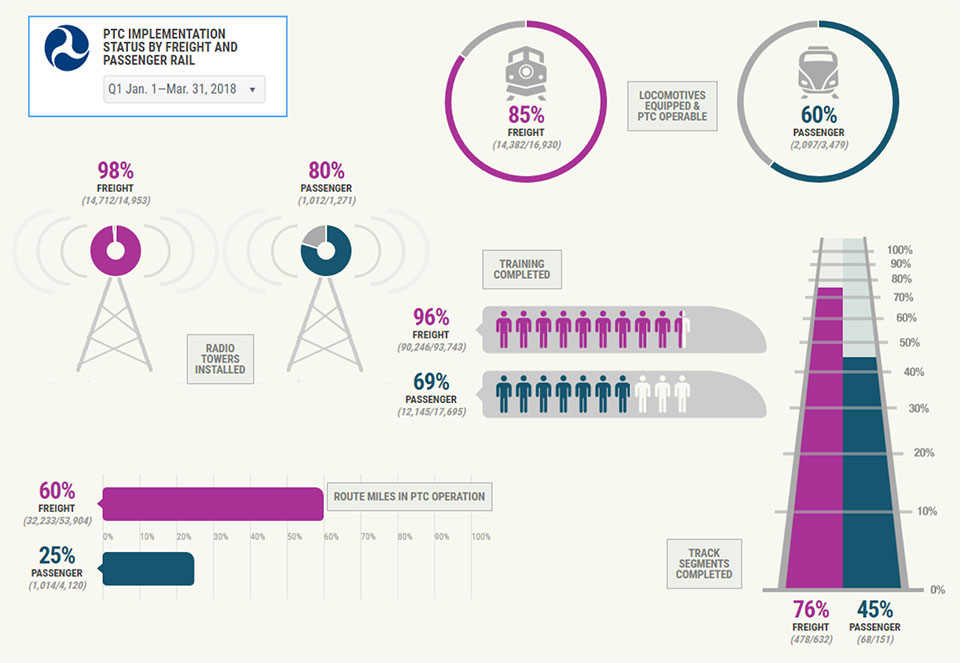
The Federal Railroad Administration issued a PTC progress report in July, with the infographic below.
Chart: Federal Railroad Administration, Jan-March 2018
This is in contrast to a previous PTC infographic, released in June 2016.
Chart: Federal Railroad Administration, June 2016
According to APTA, as of June 30, 2018:
91 percent of spectrum has been acquired;
85 percent of 13,698 pieces of onboard equipment have been installed on locomotives and cab cars etc.;
79 percent of 14,083 wayside (on track equipment) installations have been completed;
78 percent of back office control systems are ready for operation;
74 percent of 14,847 employees have been trained in PTC; and
34 percent of commuter railroads are in testing, revenue service demonstration, or are operating their trains with PTC.
“Every year, 30 commuter railroads across America safely carry passengers on 501 million trips,” said APTA President and CEO Paul P. Skoutelas. “With safety as our number one priority, the commuter railroads are making strong and continuous progress in implementing Positive Train Control.”
Under current law (49 U.S.C. 20157), commuter railroads are required to meet the following milestones by Dec. 31. As defined in 49 U.S.C. 20157(a)(3)(B), they are to have:
Installed all PTC hardware (wayside and onboard equipment);
Acquired all necessary spectrum for PTC implementation;
Completed all employee training;
Initiated testing on at least one territory subject to the PTC requirement (or other criteria); and
Submitted a plan and schedule to the Secretary of Transportation for implementing a PTC system.
Upon reaching these milestones by the end of 2018, the commuter railroads must implement PTC as soon as practicable and no later than December 31, 2020.
“Positive Train Control is a critical commuter rail safety enhancement,” said SEPTA General Manager Jeffrey D. Knueppel, general manager of the Southeastern Pennsylvania Transportation Authority (SEPTA). “Implementing PTC at SEPTA, during a challenging period of capital funding, has been an authority-wide commitment. Throughout this effort, our in-house team has been working continuously with Amtrak, our freight partners, and third-party contractors to address technical and interoperability challenges. SEPTA trains on all 13 regional rail lines are equipped and operating with PTC, and SEPTA is proud to have implemented this safety technology for our customers and employees.”
“Implementing Positive Train Control in Chicago’s dense and busy railroad network has been very challenging, but Metra is right where we said we’d be in terms of finishing the job,” said Jim Derwinski, CEO/executive director of Metra, the Northeast Illinois commuter rail system. “Working with our freight partners, we expect to have PTC implemented or in revenue service demonstration on six of our 11 lines by the end of 2018, and to complete the job by 2020.”
The commuter rail industry is moving aggressively to implement PTC as it faces considerable technical and financial constraints. At a time when the national transit state of good repair backlog stands at an estimated $90 billion, the commuter railroad industry’s cost to implement PTC will exceed $4.1 billion, diverting funds from other critical infrastructure priorities.
Since Congress mandated PTC, the federal government has awarded $272 million in PTC grants. Another $250 million was made available in May 2018.
PTC is an unparalleled technical challenge in scale, complexity, and time required. The challenges include:
a limited number of PTC-qualified vendors simultaneously in demand by both the passenger and freight railroad industries to develop, design and test this complex safety technology;
diagnosing and resolving software issues,
securing adequate access to track and locomotives for installation and testing, and
achieving interoperability, as commuter rail systems operate in mixed traffic with other freight and passenger railroads.
U.S. Department of Defense interference events, designed for training in GPS-denied environments, also can affect civilian aircraft.
In April 2016, a business jet lost all GPS signals because of an interference event and was forced to enter a Dutch Roll, resulting in an emergency descent.
Pilots and air traffic controllers in the National Airspace System want to better understand the operational impacts of the intentional interference, which has risen from 43 in 2012 to 127 in 2017.
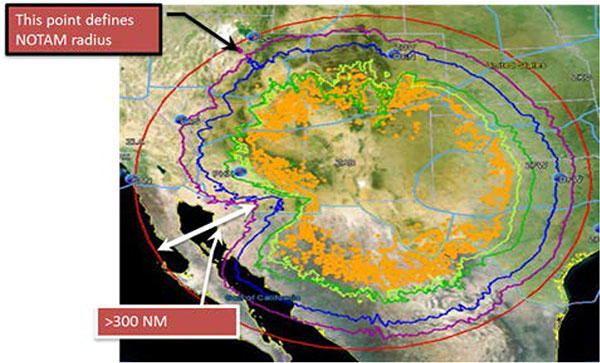
Interference Contours from the YPG 17-02 GPS interference event in January 2017. (Source: FAA)
An RTCA Tactical Operations Committee composed of Federal Aviation Administration (FAA) and industry experts in March issued a report with recommendations to change the current Notices to Airmen (NOTAMs).
Along with a description of the event, NOTAMs show contours that represent an area outside of which operators should expect no interference impact. Both operators and the FAA agree that most aircraft experience no interference impact even inside the contours.
Operators recommend that the FAA provide pilots and controllers improved understanding of where to expect interference impacts based on different equipment capabilities, so that operators could integrate such information in their flight planning processes.
Impact varies widely, depending on aircraft, avionics, position, time, location and terrain. Effects could include complete loss of GPS navigation, position errors, loss of ADS-B or impact to GPS-dependent systems.
Operators are encouraging thte FAA to conduct outreach with civil aviation stakeholders around significant interference events so they better understand the impact.
The FAA says it is studying the committee’s 25 recommendations.
Automotive technology provider ERM Advanced Telematics has launched the StarLink Tracker with Wi-Fi, which integrates advanced vehicle tracking, driver behavior monitoring, theft prevention, Bluetooth, Wi-Fi and 4G cellular capabilities in a single device.
The company’s products have been installed in more than 1.5 million vehicles worldwide, the company said.
The StarLink Tracker with Wi-Fi is the first product under ERM’s new Wireless Connect strategy, which aims to use wireless technologies to provide its partners — vehicle fleet management companies, vehicle manufacturers and importers and car insurance companies — with a competitive edge.
The StarLink Tracker is a modular solution that is designed for installation both in vehicles on the production line and in the aftermarket, for vehicles that have left the production line. It turns any vehicle in which it is installed into a connected car.
The modularity of the product allows the addition of capabilities anytime through the use of add-on products provided by ERM or by a third party. This can be done on demand and without any need to replace the StarLink Tracker device, which keeps functioning as the central tracking and communications unit under any such solution.
The StarLink Tracker with Wi-Fi took about a year to develop, and ERM has already received its first orders to supply the product from customers in the United States, India and Australia.
The 120-gram tracker creates Wi-Fi hotspots in the vehicle for up to eight devices. It features a GPS/GLONASS/Galileo location module and an ability to navigate inside underground parking lots or in mines; a 4G cellular modem; internal antennas, emergency button support and built-in data logger.
Other capabilities are internal management of up to 500 driver IDs, remote immobilization, wireless connectivity to a wide range of additional ERM and third-party products and many other features.
As the core infrastructure for a Connected Car applications, the product can integrate to full range of the vehicle’s internet connectivity needs, which are provided by the use of the tracking unit’s SIM card without the need for any additional SIM card, the company said.
The StarLink Tracker with Wi-Fi and products that ERM Advanced Telematics will launch in the future under its Wireless Connect strategy, can be installed using the installer’s standard smartphone which communicates through Bluetooth connection in order to configure the product and perform any required adaptations. All this can be much faster compared to many other telematics devices and with much less hassle that might have arised due to the need to hook-up and hide wires.
The StarLink Tracker with Wi-Fi is also equipped with a microphone and loudspeaker to initiate and receive calls and dial emergency numbers. One application for this can be E-Call (Emergency Call), such as in the European Union or just as an Emergency Call application.
When pressing the location unit’s emergency button or immediately after an impact above a certain intensity, the unit will allows conversation between the vehicle’s occupants and the emergency center personnel, who can hear what is happening in the vehicle and identify events such as threats against the driver or accidents.
The product will also provide information about the driver’s behavior, including careless driving, accidents, off-road driving, acceleration during turns, speed violations and more, information that can be used by the manager to significantly improve fleet management capabilities, performance and can decrease operational expenses.
PCTEL Inc. has announced the next generation of its Trooper antenna, the company’s flagship multi-band platform for public safety fleets.
The new Trooper II provides optimal wireless communications performance through the antenna’s 4-port 4G LTE connections and 4×4 802.11ac Wi-Fi MIMO capability, the company said. It also incorporates PCTEL’s newest high rejection multi-GNSS technology for high precision tracking and asset management.
The Trooper II antenna. (Photo: PCTEL)
“The Trooper II antenna enhances PCTEL’s successful Trooper platform, with expanded multi-band RF and GNSS capability in a robust, aerodynamic housing,” said Rishi Bharadwaj, senior vice president and general manager of PCTEL’s Connected Solutions group. “Its slender new design with a single cable exit accommodates installation restrictions often encountered on modern public safety vehicles.”
“Our Trooper antennas have been broadly deployed on public safety fleets, notably in support of the leading FirstNet public safety broadband network systems. The Trooper II is also ideal for many Industrial IoT deployments,” Bharadwaj added.
The rugged Trooper II (part #GL9X1AX-TRB) features PCTEL’s new proprietary high rejection multi-band technology, which supports GPS L1, GLONASS and Galileo for high precision tracking.
In addition to public safety applications, the antenna is suitable for tracking and communications support for industrial internet of things (IoT) and other fleet management applications, including farming tractors for precision agriculture, utility service fleets and railway positive train control systems.
PCTEL will display the Trooper II antenna Aug. 6-7 at APCO 2018, Booth 1719, along with its portfolio of antennas for the public safety industry and grid testing solution for in-building public safety networks.
The Trooper II antenna is available for pre-order now. First shipments are expected in early fall.
A GPS-like ground-based technology teamed with inertial measurement and driving robots to deliver the necessary accuracy when obstructions knocked out GPS as a reliable sole sensor.
By David Aylor, Insurance Institute for Highway Safety Andrew Pick, Anthony Best Dynamics Ltd. Paris Austin and Martin Parry, Oxford Technical Solutions Ltd.
Consumer information organizations like the Insurance Institute for Highway Safety (IIHS) design test procedures to compare different automobile manufacturers’ safety systems. The test equipment must be repeatable and as independent as possible of time of day, weather conditions or test-driver behavior.
In 2015 IIHS completed a $30 million expansion of the Vehicle Research Center (VRC), its centerpiece a 5-acre fabric-covered track, to allow testing to continue rain or shine. It is complemented by an outdoor track for a total area of 15 acres.
IIHS rates crash prevention systems such as Forward Collision Warning (FCW) and Automatic Emergency Braking (AEB), and looks at how well those systems can identify road users like pedestrians and bicyclists.
To simulate real-life potential crashes for safe, accurate and repeatable testing, the Institute has been researching robotic equipment to automate some of the driving tasks.
While the covered track offered much needed all-weather testing capability, it introduced a challenge for the standard high-accuracy GPS/GNSS equipment used for testing. IIHS operates a multi-frequency GNSS base station with real-time corrections. High-accuracy position, velocity and time (PVT) and other relevant parameters from these GPS units are required for testing and are essential for operating robotic test equipment.
However, tests on the covered track clearly showed the equipment was not delivering the required accuracy, reliability and repeatability: the steel trusses of the covered track roof were a sufficient obstruction to GNSS signals.
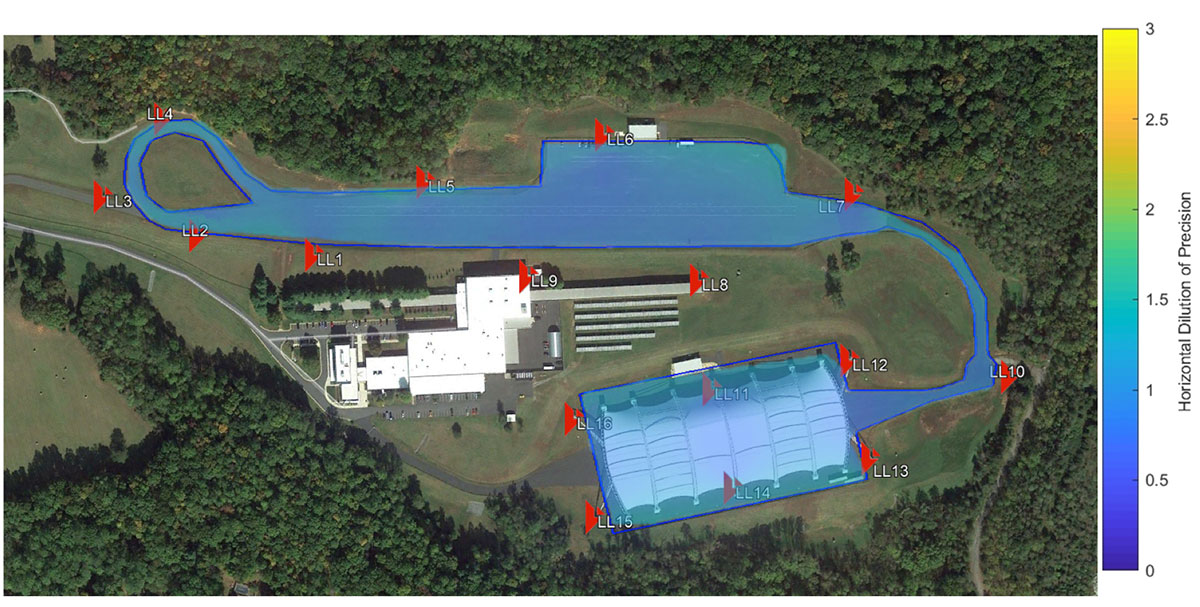
Locata.Locata provides an RTK GPS-like positioning capability utilizing ground-based transmitters which precisely time-synchronize to one another using their proprietary ranging signals without the need for cables or atomic clocks. This delivers centimeter-level accuracy with very high reliability, in networks of strategically placed, static LocataLites (LLs).
The IIHS Locata network was deployed with 16 LLs covering both open and covered test tracks (Figure 1). The network meets two key requirements: accuracy of 10 cm or better at 95% confidence and a very high degree of repeatability with a service availability (defined as meeting the above requirement) of better than 95% of the time.
FIGURE 1. VRC Locata Network and HDOP Quality in Locata Service Area. (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)
AB Dynamics. Anthony Best Dynamics supplies driving robots for the design, development and testing of automotive technology. Driving robots precisely and accurately control the vehicle steering wheel, brake and throttle pedals with a level of repeatability that vastly exceeds that achieved by human test drivers. When coupled with an accurate position measurement sensor the possibility of centimeter accurate path-following control becomes reality.
In ABD path-following control software, motion data is collected from a Locata/INS integration unit at 100 Hz and fed back to the robot’s path-following controller. The path-following controller employs a speed-dependent look-ahead algorithm that not only maintains the vehicle heading but allows centimeter-accurate path control.
OxTS.Oxford Technical Solutions specializes in the design and manufacture of GNSS-aided inertial navigation systems (GNSS/INS) for automotive testing.As well as one-centimeter position accuracy, OxTS systems measure movement in all vehicle-axes at up to 250 Hz.
Systems that only rely on inertial measurements are also prone to drift with time, so OxTS products are GNSS-aided; several other inputs can be used alongside the inertial measurement platform to create a hybrid system where each technology mitigates weaknesses in others.
The Locata network and associated receivers are configured to use the same time and coordinate frame as GPS so the measurements are identical to that of a GPS receiver. The OxTS system then uses this information as it would normally and is able to output accurate and reliable vehicle measurements while maintaining excellent position accuracy.
Measurements can be utilized by other equipment such as driving robots or logged for post-processing. Raw measurements are also logged internally so the data can be downloaded and reprocessed post-test, to test different scenarios or make other changes.
The driving robots have steering and pedal actuators that can be quickly installed without the need to make modifications to the vehicle as shown in Figure 2. Even with the robots installed, the steering wheel, throttle and brakes remain accessible to a human driver. At the heart of the robot is a dedicated real-time controller, which coordinates the steering and pedal robots and captures data at 1000 Hz.
FIGURE 2. Driving robot. (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)
Locata and OxTS units were installed in a rear passenger seat. The Locata antenna was roof-rack-mounted on a ground plane, approximately aligned with the centerline of the vehicle. The roof rack contained a second Locata antenna connected to a second Locata receiver. This was used for post-processing accuracy analysis of the fixed baseline (distance) between the two Locata antennas.
Test procedure
The automation kit enables the vehicle to be driven in manual mode and record scenarios for later replay. Drive scenarios can also be created in the user interface using basic geometric shapes and designate start, end or special maneuvering points within drives.
A local two-dimensional coordinate frame can be created with or without alignment to a global coordinate system. Each scenario may be replayed at various speed settings. For instance, most scenarios described later were replayed multiple times at different speed settings, often incrementing in fixed steps from a low speed such as 10 Km/hr.
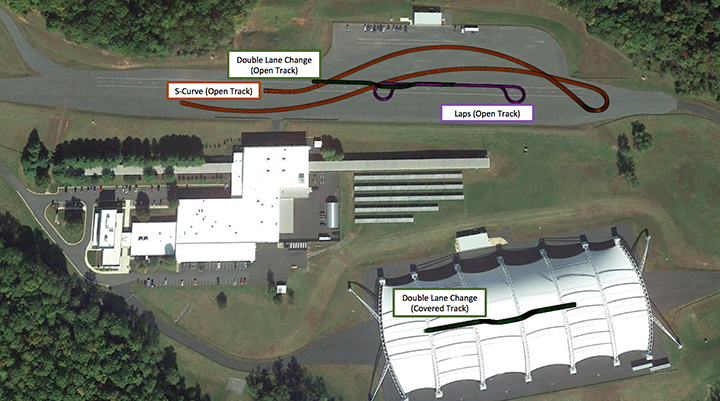
The demonstration platform was driven in various driving patterns on both test tracks. Figure 3 shows these patterns as a map derived from reported vehicle positions during the repeats of each scenario.
FIGURE 3. Test Scenarios.(Figure: D. Aylor, A. Pick, P. Austin and M. Parry)
The Double Lane Changes (DLCs) conducted on both tracks resemble the driving pattern needed for testing most collision-avoidance and lane-change features. The S-curve is a driving pattern used for the IIHS headlight evaluations.
Analysis and results
Data analysis was focused on characterizing the accuracy and repeatability of the automated test setup as a complete system first and then Locata alone as the core positioning system. As the first step, data from two full days of testing were reduced to repetitions of the various driving patterns shown in Figure 3. Start and end times of each repetition were extracted from AB Dynamics systems and corresponding Locata system data was further processed to generate the results shown here.
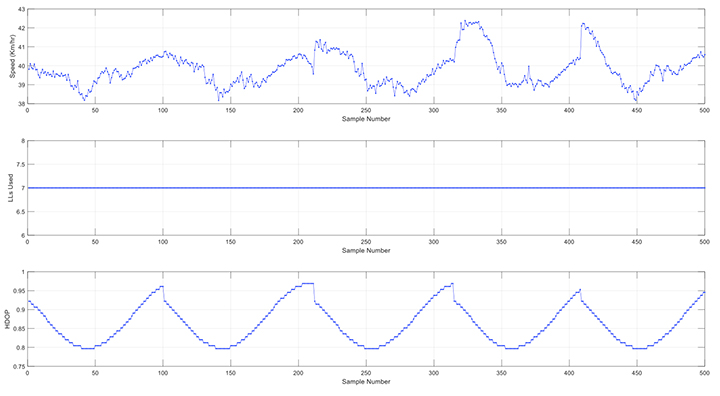
The foundation for highly repeatable control system and positioning accuracy is to have a highly reliable network that delivers repeatable DOPs and number of ranging signals at any given track location. Repeatability of the numbers of LLs seen and the HDOPs were investigated for this purpose. Shown in Figure 4 is the actual number of LLs observed and the resulting HDOP during the five repeats of the DLCs done at 45 km/h in the covered track.
FIGURE 4. HDOP & LL Count in Double Lane Change at 45 km/h (Covered Track). (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)
The number of LLs used remain constant at seven as expected and the HDOP change resulting from the motion repeats for each of the repetitions. Shown in Figure 5 are similar plots for the seven repetitions of the Lap scenario done at 20 km/h in the open track. In these, the LLs used vary between 8 and 9, with the drop happening at one end of the lap. Although slight variations can be seen in the times of the drops due to the varying speed of the vehicle during the turns, the HDOP pattern repeats consistently for all seven repetitions.
FIGURE 5. HDOP & LL Count in Lap at 20 km/h (Open Track). (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)
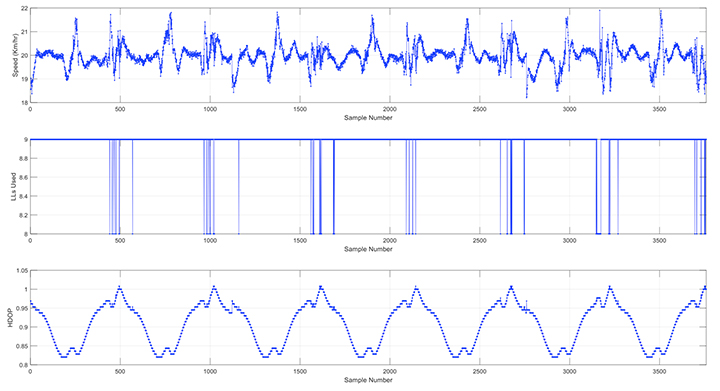
Analysis of the 48 DLC repetitions from the covered track is presented in Figure 6. Locata position data from all repetitions were averaged along the drive path to estimate a best fit path and the deviation from this was estimated (top subplot). The best fit path allows the estimation of the run-to-run deviation of the vehicle path. The middle subplot shows the mean and standard deviation of cross track error (or spread) of all the repetitions compared to the best fit path.
FIGURE 6. Covered Track Double Lane Change Performance Statistics. (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)
Despite the 48 DLC repetitions being carried out across a range of speeds (10-45 km/h) a high level of repeatability was measured. In straight segments the control system was able to repeat all the runs with below 4 cm of mean deviation from each other. This increases to 5 cm during turns due to the increasing lateral acceleration at higher speeds. The standard deviation also follows the same pattern, remaining below 3 cm during the straight-line segments and increasing up to 5 cm during the turns. The bottom plot shows the mean and standard deviation of the baseline error measured between the two Locata antennas on the vehicle.
Locata baseline error from repetitions of all scenarios were then used to estimate a probability distribution function (PDF) to assess the Locata positioning system performance alone. This included close to 180,000 data points from around 5 hours of automated driving in various parts of the IIHS tracks. Resulting PDF is shown in Figure 7.
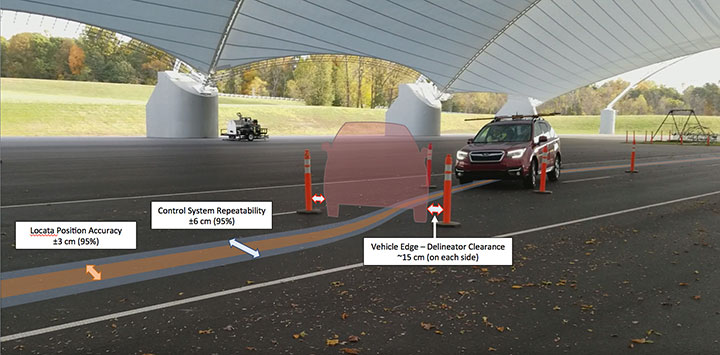
FIGURE 7. [Brown] Locata position accuracy ±3 cm (95%) using the fixed baseline between two independently operating antenna-receiver pairs in the vehicle (5 hrs of automated driving on both tracks). [Blue] ABD system repeatability ±6 cm (95%) using across track error from 48 repetitions of the Double Lane Change maneuver on the Covered Track. (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)This baseline error PDF gives a positioning accuracy of ±3 cm at 95% for the Locata position system, exceeding the IIHS requirement for positioning of 10 cm at 95% (Figure 8). The control system repeatability itself shows ±6 cm at 95%, better than IIHS expectation for positioning system alone.
FIGURE 8. Covered track automated double-lane change (DLC) test. Fully automated path following with two back-to-back lane changes through traffic delineators set 15 cm from the sides of the vehicle. Drop-in control system repeatability of ±6 cm (95%) achieved using Locata positioning accuracy of ±3 cm (95%) through 48 repetitions at speeds ranging from 10 to 45 km/hr. (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)
Conclusion
The IIHS, one of two organizations in the United States that issue public crash safety ratings, is using Locata, a GPS-like local positioning system, under a canopy-covered test track that doesn’t have RTK-capable GNSS signal visibility.
Precise positioning from Locata integrated with INS by OxTS demonstrates automated path following with centimeter-level repeatability using driving robots from AB Dynamics. The authors thank and acknowledge the Locata team for the excellent support provided throughout the project.
A roundup of recent products in the GNSS and inertial positioning industry from the August 2018 issue of GPS World magazine.
OEM
IP Solution
With multi-constellation GNSS for internet of things (IOT) devices
The Dragonfly NB2 is a highly integrated and modular IP (internet protocol) solution optimized for Cat-NB2 (3GPP Release 14 eNB-IoT) that can seamlessly be incorporated into chips and modules by the multitude of companies looking to address the large and fast-growing cellular IoT space. GNSS hardware package. For customers developing NB-IoT products that also require GNSS capabilities, Ceva-Dragonfly NB2 includes a new power-optimized GNSS hardware package, with GNSS RF receiver and multi-constellation digital front-end. The GNSS package speeds up both acquisition and tracking tasks by up to 8 times compared to Ceva-Dragonfly NB1, enabling a host of popular NB-IoT use cases, including people, livestock and asset tracking and geofencing.
Provides timing accuracy and stability when GNSS signal is lost
Photo: Oscilloquartz
Oscilloquartz has launched its enhanced primary reference time clock (ePRTC) system to enable a high level of timing accuracy and stability, even when the GNSS signal is lost. The system provides a timing source for mission-critical transport systems, such as utility networks, government infrastructure and radio access networks, and provides the strict synchronization needed for LTE-A and 5G applications. Featuring the OSA 3230B ePRC atomic cesium clock connected to an Oscilloquartz clock combiner and grandmaster, the new solution offers the extremely stable frequency of a cesium clock with the UTC-traceable signal provided by GNSS. When combined with the OSA 5430, the OSA ePRTC system provides full hardware redundancy and multiple fan-out options including PTP over 10 Gbit/s.
The SE878Kx-A series of GPS and GNSS integrated antenna receiver modules offer high performance, maximum reliability and low power consumption for consumer and business applications. The SE878K3-A and SE878K7-A are compatible with GPS, GLONASS, Beidou and Galileo and also enable device vendors to develop quickly and cost-effectively location-based IoT solutions for use in virtually any country worldwide. The SE878Kx-A series supports dual internal-external antennas to ensure connectivity when one is broken or compromised, along with a SAW filter to maximize jamming immunity. The modules are designed for mission-critical applications and other use cases where reliability is key, such as alarms, stolen cars or high-end asset tracking. The series also provides seamless integration with Telit’s cellular modules, including eCall/ERA-GLONASS compliant solutions.
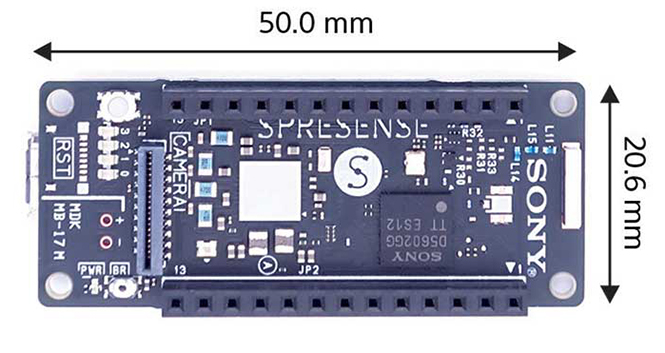
The Spresence main and extension boards are designed for internet of things (IoT) applications. The main board uses a multi-CPU structure equipped with Sony’s GNSS receiver (GPS+GLONASS) and high-resolution audio codec. A variety of systems for applications such as drones and other IoT devices can be built by combining the boards and developing the relevant applications. The boards’ software and hardware is available via open platform, allowing for a wide range of developmental possibilities. The main board can be used to control a drone using GPS positioning and a high-performance processor, voice-controlled smart speakers and low-power consumption sensing cameras. It also can be combined with sensors for use in systems that detect errors in production lines on the factory floor.
Designed for geopositioning, construction and mapping
Photo: Topcon
The T-18 handheld controller has a 3.7-inch sunlight-readable display, a 1-GHz processor and 1 GB of internal storage. For field data collection using Topcon’s MAGNET software, the T-18 offers a durable ergonomic solution with fast processing, excellent connectivity and a long (10-hour) battery life. It has a 3.5G cellular modem for connectivity with Topcon MAGNET solutions for sending and receiving data to the cloud company account. The modem also can be used for real-time kinematic (RTK) correction services. Other features include Bluetooth and an IP65 rating for dust and water protection in demanding job-site conditions.
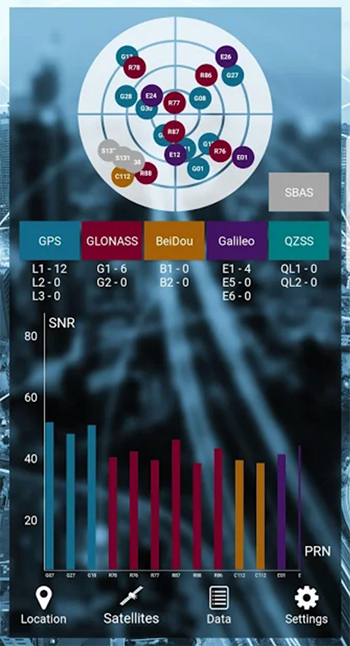
The SXblue ToolBox is an Android application for SXblue GNSS receivers, enabling users to view and analyze the position data and metadata related to its location. The user can send commands that enable or disable some features, including systems in use, mask angle or differential angle, and constellation in use, including GPS, GLONASS, Galileo, BeiDou and SBAS. The SXblue ToolBox is also an NTRIP client capable of connecting to a NTRIP server for real-time kinematic (RTK) corrections, allowing the receiver to issue very accurate location information. The application can record, save and transfer raw data from the GNSS receiver, allowing post-processing on computers for surveying and geomatics professionals.The toolbox has been developed with special consideration for modern mobile devices and attention to user and dealer feedback. It includes a series of configurable audible and visual alarms for determining the thresholds of the information provided by the SXblue GNSS receiver.
The Leica RTC360 laser scanner is equipped with edge computing technology to enable fast and accurate creation of 3D models in the field. It combines high-performance laser scanning, edge computing and mobile app technologies to preregister captured scans quickly and accurately. With the push of a button, two million points per second of high dynamic range imagery can be captured to create a full-dome scan in under two minutes. It features a visual inertial system that automatically tracks movements between setup positions. The scans captured can be combined and preregistered on a mobile device, where they can be viewed and augmented with information tags.
Location technology allows users to see rooms, gates and offices
Screenshot: Esri
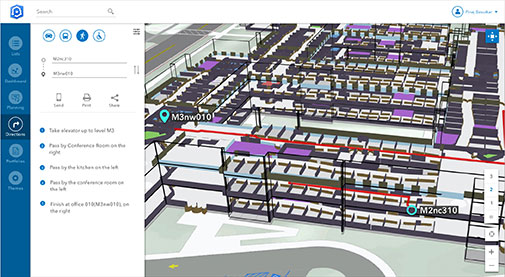
ArcGIS Indoors is designed to enable interactive indoor mapping of corporate facilities, retail and commercial locations, airports, hospitals, event venues, universities and more. The solution applies the latest location technology to allow users to see and share where assets, rooms, departure gates and offices are located. It uses data streams, real-time processing and location intelligence tools to help businesses and other organizations understand how to better coordinate space and other resources with their facilities and campuses. Insights from sensor networks deliver real-time information to managers and executives through interactive dashboards, while visitors and employees can find useful information about the buildings they occupy. The solution also allows users to quickly access and explore critical business information, such as the location and status of fire extinguishers and their last inspection dates.
Meets demands for continuous, accurate vehicle location
The ASM330LHH module. (Photo: STMicroelectronics)
The automotive-grade ASM330LHH six-axis inertial sensor is designed for super-high-resolution motion tracking in advanced vehicle navigation and telematics applications. It lets advanced dead-reckoning algorithms calculate precise position from sensor data if satellite signals are blocked, such as in urban canyons, tunnels, covered roadways, parking garages or dense forests. Its advanced, low-noise, temperature-stable design enables dependable telematics services such as e-tolling, tele-diagnostics and e-Call assistance. Precision inertial data in six axes also meets the needs of advanced automated-driving systems. Automotive component manufacturer Magneti Marelli has selected the ASM330LHH for advanced telematics systems, to be fitted as original equipment by global automotive groups in upcoming vehicle ranges.
Esri and Waze smart cities partnership grows. (Image: Esri)
The free crowdsourced traffic and navigation app Waze is now fully supported by ArcGIS Online, where its live feed of mapped traffic alerts and other information, such as accidents, congestion and street damage, can be used in applications in minutes. Waze Live Alerts, available in ArcGIS Marketplace, is free to members of the Waze Connected Citizens Program. The program, a two-way sharing of publicly available traffic and road condition information, offers governments a stream of data, constantly updated in real time. This enables personnel to make data-driven infrastructure decisions and improves the efficiency of incident response.
Traffic engineers can use the data to analyze problems on the road and create targeted solutions.
Open-source platform for autonomous delivery and other iot
The AGL platform provides Mercedes-Benz Vans with the ability to create autonomous delivery robots. (Image: Daimler)
Automotive Grade Linux (AGL) is a collaborative cross-industry effort to develop an open platform for the connected car. Mercedes-Benz vans are using AGL as a foundation for a new onboard operating system for its commercial vehicles. The Mercedes-Benz “adVANce” initiative focuses on connectivity and internet of things (IoT) applications, innovative hardware solutions, new on-demand mobility and rental concepts, and fleet management solutions. The AGL platform provides Mercedes-Benz Vans with the flexibility to rapidly create tailored solutions for customers, including adding and connecting any kind of IoT component to the vehicle, such as sensors, automation controls and actuators. The new AGL-based operating system will debut on various Mercedes-Benz Vans prototype projects later this year.
eCyber is an integrated hardware-software product that protects vehicles against ransomware and other cyber-attacks. It can be installed in a vehicle by authorized parties, such as vehicle importers and fleet managers, in the aftermarket stage after the vehicle has left the factory, as well as by the OEM itself during manufacture. eCyber, a combined hardware and software solution in a compact box, is installed between the vehicle’s external communications device and the vehicle’s CAN (Controller Area Network) bus. It provides a secure gateway for outside communications to the CAN bus, allowing only communications with predefined parameters and values to go through. It blocks any unrecognized communications to and from the CAN bus, so no malicious digital communications can disrupt vehicle function.
Engineered for UAV-imaging missions, the iXM 100MP is a high-productivity metric camera with a range of high-resolution lenses. It is ready for integration with various UAV platforms, including Phase One’s DJI Matrice 600 Pro. The camera incorporates a medium-format sensor with backside-illumination technology, enabling high light sensitivity and extended dynamic range. Phase One also offers four new RSM lenses — with focal lengths ranging from 35mm to 150mm — to fit the new sensor’s 3.76 μm pixel size and 33 x 44 mm frame size. The lenses are available with either fixed-focus or motorized-focus functionality. The fixed-focus 35mm and 80mm lenses are especially suitable for surveying applications.
For quick approval of flights over controlled airspace
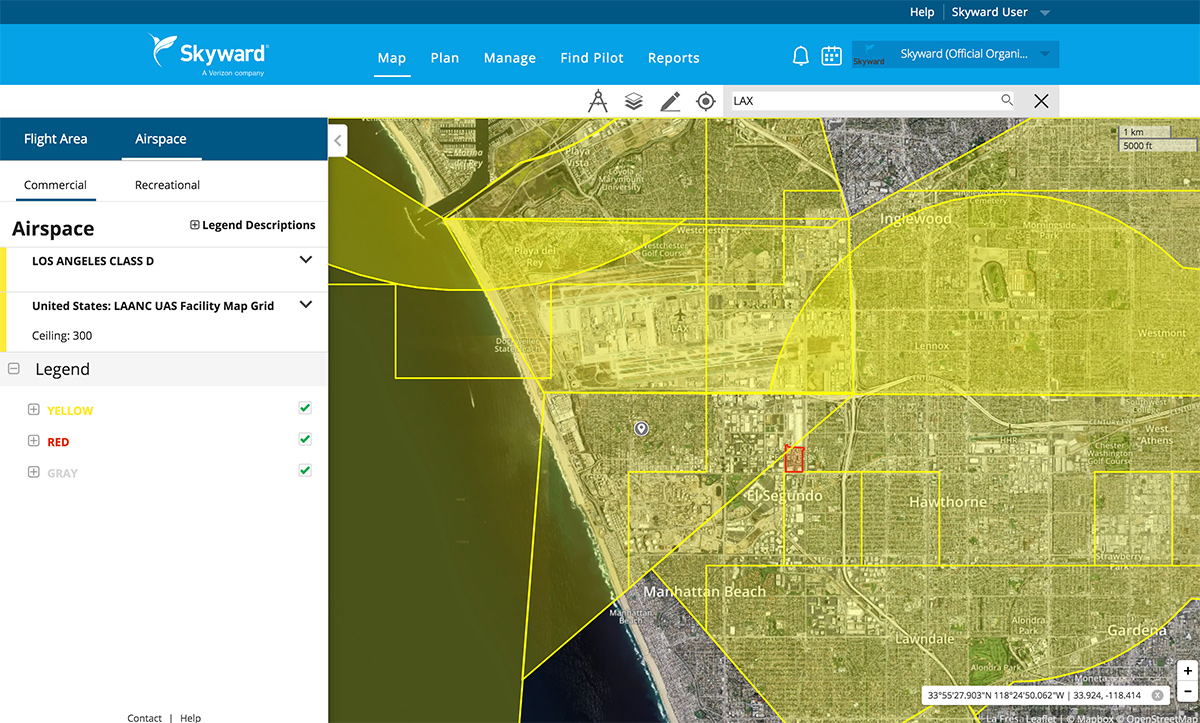
Screenshot: Skyward
Commercial drone operators in California and Hawaii — as well as a few areas in Nevada, Utah and Arizona — can get quickly authorized to fly in controlled airspace using the LAANC (Low Altitude Airspace Notification Capability) platform. Skyward is an FAA-approved airspace vendor. With Skyward, pilots with a Part 107 license can get permission to fly in regulated airspace in seconds compared to manual authorizations that can take months. This makes it significantly easier for businesses of all sizes, particularly in the construction and warehousing industries, to manage a fleet of drones to access valuable, cost-saving data. Skyward’s LAANC expansion includes airspace in the busy metro areas of Los Angeles, the Bay Area, San Diego, Las Vegas and more than 50 smaller air markets.
GNSS positioning algorithms combined with automotive-grade GNSS chipsets, inertial measurements and GNSS corrections services from a ground network of reference stations can deliver instant lane-level accuracy.
By Tasha Wong Ken and Sara Masterson, Hexagon Positioning Intelligence
Autonomous technology is reshaping the future of the automotive industry and Hexagon’s Positioning Intelligence Division (Hexagon PI) is developing cutting-edge positioning solutions to support the growth of this rapidly changing industry.
Hexagon PI is working with GNSS chipset manufacturers like STMicroelectronics to deliver automotive-grade, multi-frequency GNSS chipsets that combine our positioning algorithms with automotive-grade GNSS hardware to deliver solutions for connected cars, advanced driver-assistance systems (ADAS) and autonomous driving applications.
In June, Hexagon PI introduced TerraStar X GNSS correction technology, which enables lane-level vehicle positioning in under a minute, using automotive-grade chipsets and the Hexagon PI positioning engine. Built on the company’s latest precise point positioning (PPP) algorithms, TerraStar X leverages existing Hexagon capabilities in ground network infrastructure, correction data generation, and data packaging for delivery.
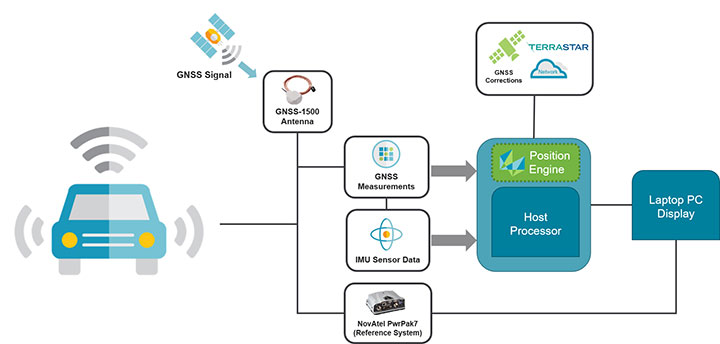
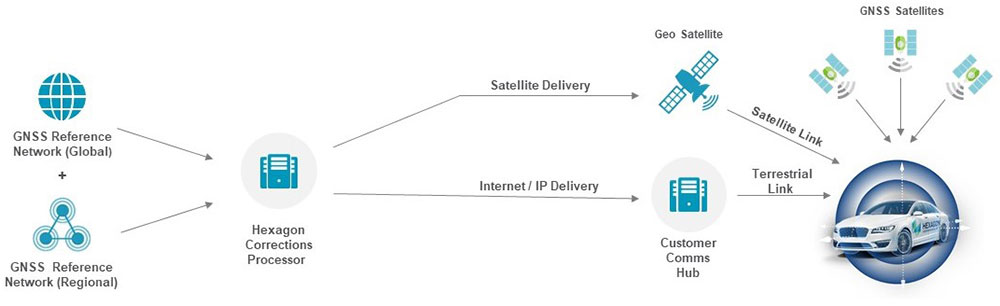
FIGURE 1. TerraStar X correction data generation and delivery to the vehicle. (Image: Hexagon PI)
By combining Hexagon PI’s software positioning engine with GNSS measurements from automotive-grade chipsets and inertial measurement unit (IMU) data, TerraStar X GNSS correction services can deliver instant lane-level accuracy positioning.
TerraStar X combines existing TerraStar global clock and orbit data with regional ionospheric correction data from Hexagon’s vast network of SmartNet reference stations. This forms the technology foundation for future correction services on connected cars, ADAS and autonomous driving markets, including integrity and authentication for safety-critical applications.
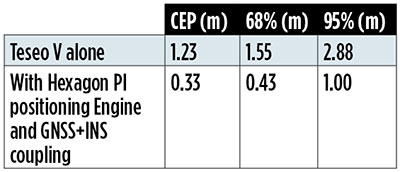
FIGURE 2. The Hexagon PI positioning engine achieves seamless position accuracy by taking GNSS measurements from the Teseo V GNSS receiver, combining it with their positioning algorithms, GNSS+INS coupling, and TerraStar X correction technology. (Image: Hexagon PI)TABLE 1. Cumulative distribution of horizontal errors from testing on German roads. (Table: T. W. Ken and S. Masterson)
HxGN SmartNet consists of a large operational reference station network, consisting of more than 4,500 stations with continuous quality monitoring and support. Correction data generation takes place at Hexagon processing centers where service reliability, redundancy and 99.999% guaranteed service uptime ensure corrections are available for users 24/7/365.
While TerraStar X utilizes the stations already available, the algorithms are flexible and will accommodate the rollout of new service areas with increased station separation, enabling continental-scale coverage.
TerraStar X technology will deliver correction data to vehicles and end users through hybrid delivery channels, including both cellular network and satellite. Combining TerraStar X technology with multiple delivery channels ensures that vehicles, UAVs, industrial vehicles, trains, and more will operate safely, securely, reliably, and efficiently.
TerraStar X testbeds are being utilized for several advanced automotive development programs in North America and Europe, TerraStar X commercial services will be available in 2019. Interested customers can request access to any of the testbeds through Hexagon PI.
Positioning Engine. Hexagon PI’s positioning engine architecture enables a flexible integration with different GNSS receiver chipsets, augmentation sensors and processor environments, providing automotive manufacturers with additional flexibility when it comes to sourcing components and subsystems of ADAS and autonomous driving solutions.
The positioning engine is being developed to Automotive Safety Integrity Level (ASIL)-B standards and will include a proprietary GNSS integrity solution to ensure safe positioning within defined protection limits tailored to the customer’s application requirements.
Recent test results
Hexagon PI conducted demonstrations in Michigan and Germany using an automotive platform that combined automotive-grade GNSS hardware with TerraStar X technology and the software positioning engine to demonstrate instant lane-level accuracy with correction data delivered over the cellular network to test vehicles.
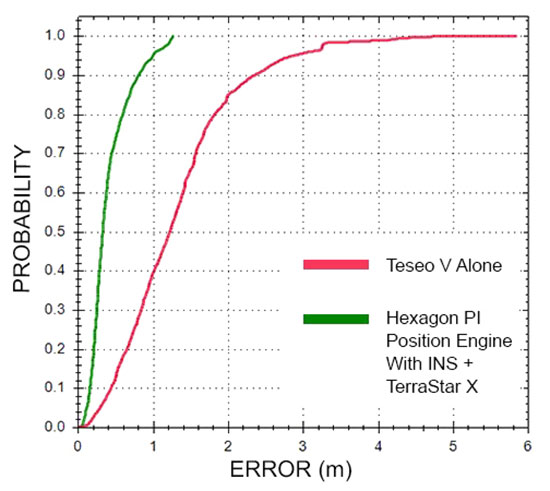
The results are from the most recent demonstration performed in urban conditions in Germany. The route consisted of a mix of controlled-access highway and light urban roads in the city. In this case, the positioning engine using TerraStar X and GNSS+INS coupling deliver 1-meter accuracy through 95% of the dataset.
FIGURE 3. Cumulative distribution of horizontal errors from tests on German roads. (Figure: T. W. Ken and S. Masterson)
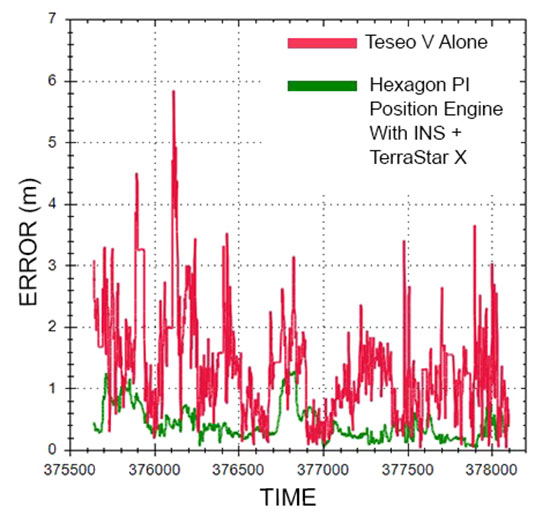
Throughout the data collection, position accuracy improves by almost 70% when TerraStar X and the positioning engine is used. In some areas, it was found that the position solution can improve up to 95% with the Hexagon PI positioning solution over the standalone Teseo V, an automotive-grade GNSS receiver from STMicroelectronics.
FIGURE 4. Horizontal position errors from testing on German roads. (Figure: T. W. Ken and S. Masterson)
Looking ahead in automotive
Hexagon PI continues to demonstrate the benefits of precise positioning on automotive-grade chipsets using augmentation sensors, our positioning engine, and TerraStar X technology in a variety of environments worldwide. Our goal is to develop a solution for mass-production that provides accurate and functionally safe positioning to enable the advancement of autonomy in the automotive industry.
Growing awareness of the vulnerabilities of GNSS signals — weak, unencrypted and easily jammed or spoofed — have made GNSS less important to steering the driverless vehicle. What’s up with that?
Extensive visual map databases are being created that, when coupled with cameras, radars and lidars on the vehicle and processed by artificial intelligence (AI) algorithms, enable the driverless car to be steered much the way humans drive. Pattern recognition processing in the vehicle allows it to “read” street signs and recognize landmarks, registering its position on the map.
This is the way a person drives in his or her home town, where they always know their orientation and don’t need GNSS. The AI processing “brain,” with access to huge map databases, either through local storage or a network connection, will always be in its familiar home environment: continuously knowing its own position and properly oriented for navigation.
So, will GNSS become unnecessary in the car of the future? Probably not.
First, no one method of navigation is foolproof, and today, GNSS is our primary method of navigating our cars. It is a cost-effective, accurate way of determining position in real time, and with the integration of inertial navigation sensors to handle cases when GNSS is intermittently unavailable, it is improving.
Second, it is not just the car itself that needs to know its location for navigation, but also others outside the car. Ride-sharing apps like Uber and Lyft, car-sharing, usage-based insurance apps, dynamic toll charging, and parking apps all depend on knowing where the car is at all times. GNSS offers sufficient accuracy for all these apps by providing location coordinates. Therefore, a GNSS receiver will most likely remain in the car.
The case for jamming and spoofing
Recall, however, that one of the weaknesses of GNSS is its open, unencrypted format. It is becoming increasingly easier to spoof these signals. Car-sharing, usage-based insurance and dynamic toll charging apps all create a monetary incentive for fraud that can be implemented with a spoofer. For example, a car in a car-sharing network can report a fake position indicating that it is safely parked in a secure area — while in reality, a thief is busy driving it away.
(Image: Orolia)
Let’s assume that all wireless connections to and from the car are secure. This is a reasonable assumption, although recently there have been demonstrations of carjacking via unsecure remote links. Standard SSL encryption, similar to what is used to enter credit card information on the internet, works well here. We have both the awareness and the technology now to prevent such carjackings from ever reoccurring.
However, even if communication links are secure, a GNSS spoofer in the car can fool the GNSS receiver into reporting a fake “safe” position right as it is being stolen. The same is true for insurance or toll apps. And the fraud does not have to be sophisticated. A simple, low-cost jammer can deny proper position just long enough to skirt payment. A secure location method is needed.
Other signals for localization
What would an ideal signal for localizing a driverless car look like?
It needs to be much stronger than GNSS so it is not easily jammed.
It needs to be encrypted so it cannot be spoofed.
It must be ubiquitous, available worldwide.
It must be reliable and robust — with 99.999% availability or better.
It must be practical and priced for the mass-market automotive application.
Though accuracy is always important, the signal used for localization does not have to be as accurate as GNSS is today. Accuracy to 10s of meters is sufficient for all these applications needing fraud protection since it would not be used for steering the car, but rather, only localization. It can also be used in tandem with GNSS to authenticate a reported position when a GNSS signal is available.
Such a signal is available today, worldwide: STL (Satellite Time and Location). Carried on the Iridium satellites, it is a special purpose signal that is more than 30 dB stronger than GNSS and encrypted for anti-spoof protection. Decoding of this signal is available via a subscription model to users.
Here’s how it would work using a car-sharing example. A group of people subscribe to a car-sharing service that provides X number of cars to serve Y number of people, where X is less than Y. The service optimally schedules people when and where a car will be available. The service provider needs to know the whereabouts of the cars at all times to maximize utilization of the fleet, so every car has a GNSS receiver in it.
But to ensure the authenticity of these reports, they also have a secure localization receiver. This receiver is assigned a unique ID that is authorized to decode the encrypted signal. (Eventually, we expect this receiver and GNSS to converge into one device much the way multi-GNSS receivers operate today).
If a position report does not agree with the authentic localization report, the fleet manager can act to recover the car immediately. Insurance providers who cover secure localization-equipped cars would also give preferential rates as an anti-theft device.
(Image: Pavel Vinnik/Shutterstock.com)
Could PRS do it?
The new Public Regulated Service (PRS) from Galileo is encrypted and could provide a similar level of authentication protection, if made available. However, it is still a weak GNSS signal that can easily be jammed. Of course, any signal can be jammed, even one that is a thousand times stronger than GNSS.
However, given the robust nature of a very strong signal, the managing system that is monitoring the cars — the insurance, toll or car-sharing system, for example — can alarm upon the loss of positioning information. Such alarms on a GNSS-only car would be frequent and often erroneous due to simple fades, yielding so many false alarms that it would render the monitoring system useless. But a loss of both the strong localization signal and GNSS would likely be considered suspicious and result in a valid alarm.
GNSS navigation is truly one of the great advances of the modern era, giving us precise time and location for any place in the world. Its two major weaknesses — that it is easy to jam and spoof — can be overcome by augmenting it with other stronger encrypted signals, such as STL, providing robust jam-resistance and positive authentication.
The airport’s new autonomous ATV begins testing in August. (Photo: Edmonton International Airport)
An autonomous all-terrain vehicle (ATV) equipped with NovAtel Inc. technology will soon join the security fleet at the Edmonton International Airport in Alberta, Canada.
The ATV will be used to detect people and animals that breach the airport perimeter, as well as locate holes in the fence to alert the security team.
This is the only known autonomous ATV to be used for airport security and it will be used to monitor its 20-kilometer fence line on a narrow perimeter road, according to Hexagon, NovAtel’s parent company.
The unarmed vehicle is controlled remotely by humans and can also drive autonomously, incorporating machine-learning to perform its tasks.
The vehicle system includes navigation, path planning, obstacle avoidance, animal and human recognition, communication systems to airport security, geo-fencing, and situational awareness and analysis.
The autonomous ATV patrols will focus on the following:
Identifying damage to the chain-link fence and fence posts, verifying barbed wire is taut and undamaged, and detecting holes or gaps under the fence
Detecting human or animal activity
Searching for obstacles using lidar
“We would not have been able to navigate the vehicle on such a narrow road if we had not used NovAtel gear,” said Ken Brizel, CEO, ACAMP.
The autonomous security ATV was developed by the Alberta Centre for Advanced MNT (microprocessor and nanotechnology) Products (ACAMP).
The airport is a member of the Advanced Systems for Transportation Consortium established by ACAMP and supported by the Government of Alberta. ACAMP is a member of the Alberta Aerospace and Technology Centre at EIA. ACAMP and EIA were able to harness technologies developed by consortium members to construct and test the autonomous ATV security vehicle, readying it for regular use at EIA.







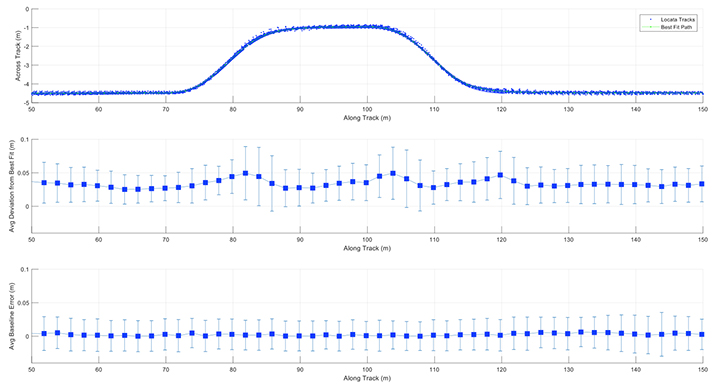
![FIGURE 7. [Brown] Locata position accuracy ±3 cm (95%) using the fixed baseline between two independently operating antenna-receiver pairs in the vehicle (5 hrs of automated driving on both tracks). [Blue] ABD system repeatability ±6 cm (95%) using across track error from 48 repetitions of the Double Lane Change maneuver on the Covered Track. (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)](https://stage.globalpositioningnews.com/wp-content/uploads/2018/08/Figure7_chart-W.jpg)