TomTom is making available Highly Automated Driving (HAD) map content in the metro Detroit area, where U.S. automakers are headquartered. Car makers and HAD-related companies can now use TomTom’s high-definition maps for precise vehicle positioning, enabling future self-driving cars to see beyond their sensors.
The HAD map, covering the stretch of road network between Farmington Hills and Ann Arbor, including I-696, 96, and 275, US-23 and M-14, will be available in June. TomTom discussed the HAD map in a session at TU-Automotive Detroit trade show, held June 3-4.
“By making high-definition map content readily available, we can make HAD a reality faster, enabling further innovation in Detroit, the heart of the North American automotive industry,” said Alain De Taeye, member of the TomTom Management Board. “Intense demand for high-definition maps is fueled by automated driving as a new growth driver. As an independent supplier with one of the world’s most sophisticated mapping platform, we are in a unique position to provide highly precise map content for all members of the HAD ecosystem.”
For the Consumer Electronics Show (CES) 2015 in January, the Audi A7 piloted driving concept car dubbed Jack used TomTom HAD prototype maps to complete a long-distance test drive, over 560 miles from San Francisco to Las Vegas.
Magellan has launched an Off Road Vehicle (ORV) Navigation platform for automotive OEMs and power sport vehicle OEMs. The new platform was showcased at the TU-Automotive Detroit trade show, held June 3-4.
Designed specifically for the off-roading enthusiast, the Magellan ORV Navigation platform allows off-road enthusiasts to plan, track and save trail rides and dirt miles, and add pictures and comments to trails.
The Magellan ORV platform includes an online user community, where riders can plan and save their trails, share trails with other riders, add pictures and comments to trails, and search for new trails. In addition, the Magellan ORV platform includes the most comprehensive outdoor trail maps available for off-road enthusiasts, covering all 50 states and Canada.
Trail Maps
The Magellan ORV platform’s trail maps are cloud based, dynamic and will continue to grow and be improved by both Magellan and the user community. Magellan’s detailed ORV maps include:
3D Terrain & contour elevation lines
National, State & Provincial service roads and trails
National, State & Provincial Parks and Recreational Vehicle Areas
Scenic Byways
Crowd-sourced trails
Food, Gas, Lodging, and General Service POI
3rd Party Trail Guides
Online User Community
Off-road enthusiasts have exciting stories to save and share. The Magellan ORV navigation platform gives off-roaders, campers, and anyone enjoying the outdoors on a vehicle the tools to plan, experience, and capture their activities in a story format, that they can keep or share with friends, family, or the larger off-road and outdoor communities.
Users can add comments and pictures to their trail rides, and share with other members of the Magellan ORV community. Magellan ORV community users can also share posts and pictures to Facebook, Twitter and Instagram directly from the Magellan ORV app.
As users share their trail rides, they garner community ranking and earn achievement badges.
iOS and Android Companion Smartphone Apps
To be a resource for the entire off-road community, Magellan’s standard iOS and Android ORV apps will be available in the iTunes and Google Play stores. This will enable any off-road enthusiast to find trails and record, save and share their own adventures.
“The Magellan ORV navigation software is designed and targeted specifically to reach off-road and outdoor enthusiasts,” said Stig Pedersen, associate vice president of product management for Magellan. “It allows customers to use their technology to participate in and share their trail and outdoor experiences. It reflects the interests of technology savvy off-road enthusiasts, and makes off-roading achievable for aspiring off-road enthusiasts.”
Designed for Auto OEMs
Magellan’s smartphone driven ORV navigation platform is compatible with all major infotainment platforms, including Weblink, CarPlay and Android Auto. The ORV platform can be branded by automotive OEMs so their customers have a consistent brand experience while planning a trail ride, and in the vehicle.
“Given the tremendous popularity of 4×4 SUVs in the US, and other major regions, Magellan’s ORV solution is a tremendous opportunity for auto OEMs to provide their customers with an integrated off-road solution that takes advantage of today’s in-dash and smartphone technology,” said Peggy Fong, president of MiTAC Digital Corporation, parent company of the Magellan brand. “With the new Magellan ORV navigation platform, auto OEMs can add to the fun and excitement enjoyed by both off-road enthusiasts and other outdoorsmen, such as hunters, fishermen, and campers.”
The 1-million-mile milestone was for modified Lexus RX 450h SUVs equipped with the self-driving technology, but the car pictured here — built entirely by google — is more fun to look at. (Image: Google)
Google’s self-driving car has driven itself one million miles. Google announced the milestone June 4 on Google Plus. “Our software has now self-driven the equivalent of 75 years of typical U.S. adult driving! Along the way, we’ve navigated more than 200,000 stop signs, 600,000 traffic lights, and seen 180 million vehicles — with several thousand traffic cones, some fluttering plastic shopping bags, and a rogue duck thrown in for good measure.”
In May, Google announced that the car had driven 1.7 million miles, but that number was for both autonomous and manual driving, The one-million-mile milestone the car just reached is for autonomous driving only.
“We’ve come a long way since +Larry Page [Google president and CEO] first challenged us to demonstrate that self-driving technology had long-term potential. Back in 2009, he gave us two audacious goals. The first was to drive 100,000 miles on public roads; in 2009, this was about 10x more miles than had ever been completed by any autonomous driving team. The second was to drive 10 sets of 100 interesting miles — well-known California routes that included crossing the Golden Gate Bridge, navigating the curves of Lombard Street in San Francisco, and traversing the 200+ traffic lights of major boulevard El Camino Real.
“We met those early goals, but it was hard to imagine we’d ever cruise the boulevards of Mountain View, Calif., as smoothly as we do today. We’re taking this million mile milestone as further proof that fully self-driving vehicles will become a reality, and we’re looking forward to finding out where the next million miles will take us.”
U.S. auto sales may drop about 40 percent in the next 25 years because of autonomous vehicles hitting the road, reports Bloomberg. In particular, shared driverless cars would force mass-market automakers such as General Motors Co. and Ford Motor Co. to slash output, a Barclays analyst told Bloomberg.
Vehicle ownership rates could be cut almost in half because many families would only need one car. However, driverless cars would travel twice as many miles as they return home between trips to ferry a different family member. As a result, automakers would have to shrink their production in order to survive.
The numbers are outlined in a new report by analyst Brian Johnson.
Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification
By Gilles Boime, Emmanuel Sicsik-Paré and John Fischer
Land-vehicle autonomous navigation requires centimeter-level qualification tools to enable confidence build-up for delivery to open-road traffic insertion. External positioning sensors over a dedicated road section can be replaced with an embedded high-accuracy, highly responsive epoch-by-epoch differential GNSS receiver coupled with an inertial navigation system. The demonstrated absolute accuracy and mobility extends the potential test area and minimizes cost for multi-environment validation.
Cover courtesy of Mercedes.
Personal cars and commercial trucks are continuously improving the driver experience and safety thanks to integration of more significant and machine-assisted control systems. Advanced driver-assistance systems (ADAS) are now integrated in all luxury cars and moving into mainstream products. Technologies covered by ADAS are specific for each car integrator, but increasingly they include now involving more safety features, such as driver assistance and partial delegation to autonomous control for small maneuvers such as lane control. The generation of ADAS systems introduced in early 2015 on high-end models are engaging more intelligence from the control system such as:
Lane departure warning system
Speed assistance and control
Driver assistance and control
Autonomous emergency braking.
It is not only individual drivers who want this technology, but also governments that are getting involved to prevent accidents and minimize the economic impact associated with them. In the European Union, the general safety regulation 2009/661 was the first step to engage member-states to act as a regulator to mandate car safety improvements. The European Transport Safety Council, a non-profit private association, released in March 2015 a position paper titled “Revision of the General Safety Regulation 2009/661.” It promotes the introduction of lifesaving technologies like intelligent speed assistance, autonomous emergency technology including all speed and pedestrian detection, and lane-departure warning systems as the next step of regulation.
Car manufacturers are not far behind. They understand their customers’ expectation of minimized risk and enhanced driving experience. Telematics is also a path to convert a single vehicle into a fully intelligent, connected and entertainment object with an associated high value. So every car manufacturer is willing to be seen as a technology master.
Toyota, for example, plans to integrate collision-prevention technology in all its mainstream and luxury cars by 2017. The ADAS new generation focuses on radar-activated cruise control technology for the collision-prevention system. The control system maintains distance from a vehicle ahead and can stop the car if driver doesn’t react. The next step is to monitor driver attention with sensors like cameras focusing on the driver’s eyes, and the pressure of the hand on the steering wheel.
However, no fully driverless car is expected in the next 10 years. This technology is limited by legal issues and the lack of reliable nationwide mapping data.
Since the technology must be fully proven to prevent any lethal threat on the user and other drivers, most car and truck companies are working actively on qualifying driverless technology today. Nissan began testing driver-assist technology on open-road traffic in Japan in late 2013. It enables highly advanced systems such as lane-keeping, automatic lane change, automatic exit, automatic overtaking of slower or stopped vehicles, automatic deceleration during congestion on freeways, and automatic stopping at red lights. This is a step towards attaining fully automatic driving, targeted for 2020 by Nissan.
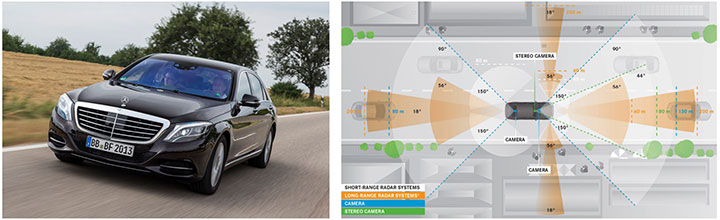
Some European manufacturers such as Daimler Benz are also early adopters. Daimler/Mercedes uses the Bertha Benz prototype car to test autonomous driving technologies. It merged multiple vision, radar and GPS sensor with digital map to monitor an open-road 100-kilometer trip in August 2013 (Figure 1).
Figure 1. Bertha Benz test car, left, running fully autonomous 103-kilometer trip in open road including 27 percent narrow urban roads. Right, networked sensor systems of the S 500 Intelligent Drive research vehicle.
All manufacturers are building driverless capability into their technology demonstration concept cars:
Mercedes with F 015 Luxury presented at the Consumer Electronic Show, early 2015;
Audi with Prologue, an extrapolation of test car RS7 concept equipped with SuperFast driverless pilot;
BMW’s electric i3 car is integrating ActiveAssist technology that enables portions of drive to be without any manual intervention, such as car parking and autonomous rally to a meeting point;
Google’s self-driving vehicle that conforms to California license requirements for driverless tests in open traffic;
Tesla model SD autonomous test car.
Although most market leaders agree that this is not a technology for mainstream production in the next few years, they all work very efficiently to master the technologies. It is a big challenge to integrate all the sensors and the navigation functions to autonomously and accurately position the vehicle on a map. The whole system must be certified to prevent any liability in case of a crash, a case that would engage the solution provider and the vehicle manufacturer.
A large part of the qualification task will benefit from simulations and integration testing platforms in realistic conditions. At the very least, a very robust final open-space validation test must take place. Car manufacturers/integrators are using private test facilities in open air to perform serious trials before proceeding to real traffic conditions. Renault uses a 10-square-kilometer facility in France (Figure 2) to perform private tests in a protected area.
Figure 2. Renault outdoor test center at Aubevoye, France.
New autonomous car drive tests have mandated equipment enabling measurement of the car’s position on the track with an extremely high precision and repeatability. There are two competing technologies to do this:
Install many location sensors on the test track;
Use a general absolute positioning system.
Here we focus on an absolute positioning system that is affordable, easy to install and low maintenance. It is based on two main assertions:
The autonomous pilot can position accurately on the test track;
The test track is accurately referenced to the absolute positioning system.
We focus more closely in this article on the first assertion; the second one can be covered with a specific calibration trial where equipment, as discussed further, can be used in quasi-static mode and experience consistent accuracy. Let us have a deeper look at the candidate position technologies to verify autonomous pilot accuracy.
Positioning Technologies
Many technologies have been proposed to obtain vehicle position on the course. However, they all must be compatible with a reliable mapping database. Given the lack of consistent road infrastructure equipment with alternative capabilities, GNSS positioning is the sole enabling method to fit to a map every place around the world. That is why driverless systems always include a GNSS sensor to help other data matching with the map. The versatility and low cost of GNSS positioning makes it a candidate for open-air validation as well.
Standalone Standard Positioning Service GPS. The SPS single-frequency GPS receivers are included in so many nomadic appliances today that they are a commodity. Since their introduction 20 years ago, their performance is well understood. Some trials were performed in different area profiles with satellite constellation position dilution of precision (PDOP) < 2. Worse results were obtained from deep urban canyons in downtown Seattle, Wash.
For every technology, the relevant performance for the test course is the lateral error to the expected center of the lane in the two horizontal dimensions, referred to as 2D or N/E for orientation north and east.
For standalone SPS GPS, the lateral error standard deviation in 2D can be as high as 46 meters and have peak errors up to 660 meters. Lateral error in 3D can be as high as 20 meters with peak errors up to 175 meters.
Such performances are out of range for any positioning verification. It can only deliver a rough estimate of the point on the map, but would not provide tight correlation with other sensors for the navigation system.
Hybridized IMU and SPS GPS. Coupling of an absolute navigation GPS receiver with an inertial measurement unit (IMU) can mitigate corruption of the navigation solution when intermittent GPS signal outage is encountered. The hybrid approach is beneficial on any difficult signal transmission path from the satellite that is not line-of-sight: in urban canyons, deep foliage, under bridges, tunnels and in any multipath area. It also yields benefits in the very short term (less than a few seconds) for dispersion on the position computed from the sky.
Over the last 10 years, the combined benefits of micro-electro-mechanical sensors (MEMS) and tight coupling algorithms have raised the bar of positioning accuracy. It enables smoothed position along track and dead reckoning (DR) in case of GNSS signal outage.
Lateral error standard deviation in 2D is lowered to 2.3 meters and peak error up to 10 meters. However, this performance is still too poor to validate a vehicle position in the lane.
Hybrid Differential Single Frequency and IMU. The next step to mitigate systematic errors of the GNSS system is to use a set of multiple reference receivers in the vicinity of the area covering the test course. The reference receivers are static. The position of the reference is determined using long-term averages to mitigate constellation errors. A minimum for a position fix of 20 minutes is commonly reported. Then the position error standard deviation in 2D is less than 2 centimeters for baselines shorter than 100 kilometers.
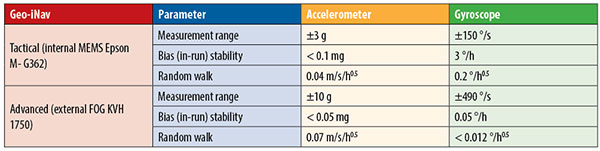
For a MEMS integrated with a standard SPS GPS single-frequency receiver with DGPS correction on a mobile platform moving at less than 70 km/hour with HDOP < 1.4, Table 1 compares performance in a 2013 test.
Hybrid Differential Dual-Frequency Carrier Phase and IMU. The GNSS solution can be further improved, taking into account both L1 and L2 frequencies to mitigate propagation error and carrier phase to achieve ultimate signal accuracy. The combination of both helps solve ambiguities associated with the carrier-phase technique. When combined with a MEMS IMU, accuracy confirmed with HDOP < 1.6 is:
Lateral error standard deviation down to 0.18 meters;
Peak error of 0.6 meter.
However, this is still insufficient accuracy when compared to 0.1 meter required for verification testing.
With such low-cost IMU, GPS outages produce a rapidly increasing lateral error over elapsed time. The lower the speed, the poorer the position result.
Another limitation common to many differential solutions is the turn-on delay for the solution. It is also a repetitive issue in case of disruption of the GNSS solution. It extends the delay to recover from DR situation.
Geodetics’ Epoch-by-Epoch
Geodetics Inc. has developed a new class of instantaneous, real-time precise GPS positioning and navigation algorithms, referred to as Epoch-by-Epoch (EBE) and employing hybridized dual-frequency differential GPS with a high-performance IMU.
Compared to conventional real-time kinematic (RTK), integer-cycle phase ambiguities are independently estimated for each and every observation epoch. Therefore, complications due to cycle slips, receiver loss-of-lock, power and communications outages, and constellation changes are minimized. There is no need for the initialization period (several seconds to several minutes) required by conventional RTK methods.
More importantly, there is no need for re-initialization immediately following loss-of-lock problems such as those that occur when a mobile GPS receiver passes under a bridge or other obstruction, or when it loses satellite visibility during a shaded portion of road. In addition, EBE provides precise positioning estimates over longer reference-receiver-to-user-receiver baselines than conventional RTK.
This feature supports testing for long-range operations, for example, such as positioning a vehicle on a lane. The reference receiver is set in the vicinity of the test center track.
EBE requires the use of a minimum of two receivers, each of which is tracking a common set of five or more satellites and providing simultaneous dual-frequency phase data. Typically, one of the receivers is stationary, but this is not a requirement.
EBE has been proven utilizing dual-frequency receivers and operating at distances of up to 50 kilometers from the nearest base station in unaided mode. Additionally, the EBE algorithms operate in a network environment and make optimal use of all GPS measurement data at each epoch, gracefully degrading the position accuracies when some measurement data are not available. Furthermore, the system will make use of an IMU system, compensating for outages when line-of-sight to the satellites is blocked. This produces a robust and more reliable system.
Epoch-by-Epoch can deliver several benefits including:
Computationally efficient algorithms that provide a position estimate based on a single epoch in several milliseconds. This allows the real-time position estimate to be computed on the user platform (assuming reference station data is sent to the user platform).
An initialization period is not required. Since RTK requires some period of time (that can be measured in seconds to minutes) to perform ambiguity resolution, this is an important capability for platforms that:
require high accuracy (for example, for end-game scoring);
cannot see the satellites until launch;
have short flight or test course duration;
A re-initialization period following loss-of-lock is not required, unlike RTK, which needs to restart the integer-cycle phase ambiguity resolution process. This is another important capability because vehicle monitoring is considering EBE for dynamic applications where loss-of-lock and loss-of-data are likely.
However, it must be mentioned that many of the GPS receivers in use by the test (and training) community today do not support this dual-frequency requirement. Hence, those systems could not realize the maximum benefit.
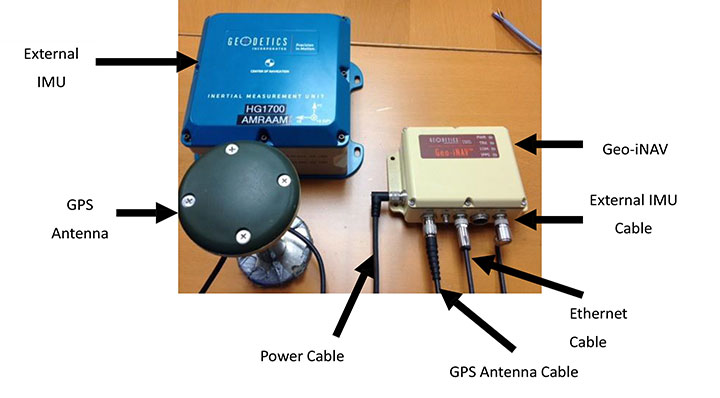
This technology is implemented in a rugged modular platform (Figure 3) with three main units:
A dual-frequency GPS antenna,
An integrated INS coupling GPS receiver with either an internal MEMS IMU or external IMU,
An external fiber-optic gyroscope (FOG) IMU for high-end accuracy and reliability. The external IMU is optional and dedicated to increasing the DR capability.
Figure 3. Dual-frequency differential navigation unit hybridized with external fiber-optic gyro.
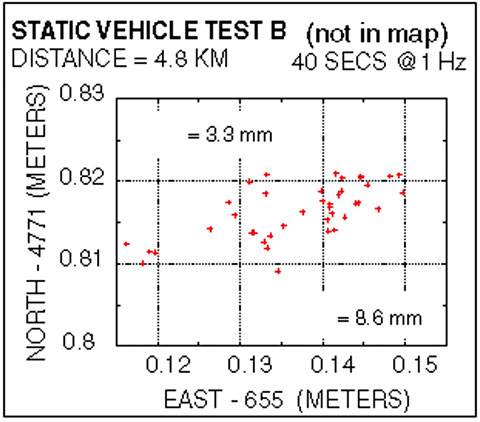
Performance. Tests have been performed in conditions close to the land-vehicle navigation validation. It is based on measurements on-the-fly with no post-processing except for evaluation of the error.
The first case is a static position of the rover 4.8 kilometers away from the reference receiver. Positions are updated once per second. The system includes a FOG IMU. the lateral error peak is less than 4 centimeters. Bias error is less than 1 centimeter. See Figure 4.
Figure 4. Single point error when rover is static.
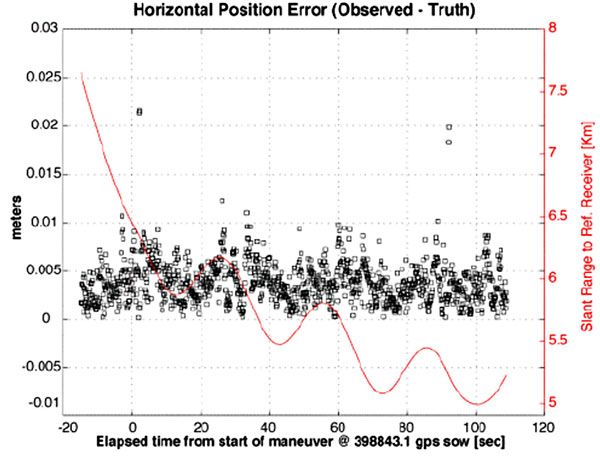
The second test case is with a high-dynamic mobile platform, moving at a speed of 200 km/h, with an average distance from the reference to the rover of 6 kilometers. Lateral error standard deviation is 0.5 centimeters, peak error is less than 2.2 centimeters. Bias error is lower than 0.2 centimeters (Figure 5).
Figure 5. Dynamic trial test single point error.
The performance in these test cases meets the expected accuracy for validation of autonomous navigation.
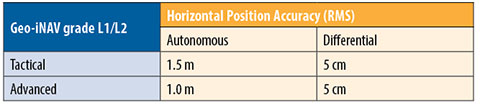
One last method to increase accuracy is to switch to a different class of IMU performance, from tactical grade to advanced. When in the line-of-sight of the GNSS sky-view, the performance is the nearly the same.
Conclusion
A real-time, differential Epoch-by-Epoch, dual-frequency carrier-phase GPS receiver, tightly hybridized with a high-performance IMU can provide absolute error lower than 5 centimeters in the 10-kilometer baseline range of the reference static receiver. This is fully adapted to the qualification of driverless auto-pilot systems for the targeted year of 2020. It can avoid the need to use complex theodolite and vision calibration systems. It provides maximum flexibility and minimum sustaining costs.
Acknowledgment
This study has been made possible thanks to materials provided by Geodetics Inc. and the advice of Jeffrey A. Fayman, vice president, Business & Product Development, Geodetics Inc. The results displayed in Figures 4 and 5 are from a test with a medium-sized UAV from Allied Drones, model EF44 high-endurance quad.
Manufacturers
The Geo-iNAV family is a range of GPS-aided INS solutions available in different configurations, including various GPS receivers (L1, L1/L2 RTK, SAASM), internal MEMS or external FOG IMU. As part of this family, the Geo-RelNAV provides differential GPS relative navigation capability, the Geo-hNAV includes a dual GPS antenna receiver for static heading measurement capability, and the Geo-PNT combines position and attitude measurement with precise timing distribution.
Gilles Boime is is chief scientist for Spectracom. He is involved in GNSS signal generator, hybridized navigation platforms, GNSS timing and synchronization innovative solutions build-up. He holds an engineering diploma in telecommunication from Institut Superieur d’Electronique de Paris.
Emmanuel Sicsik-Pare is strategic product manager for Spectracom. He is involved in timing and navigation products and systems definition and application market monitoring. He holds a M.Sc degree from Telecom Bretagne.
John Fischer is CTO of Spectracom. He has more than 30 years experience creating navigation and communications systems, received his master’s in electrical engineering from SUNY at Buffalo. Prior to joining Spectracom, he worked in radar, command and control, and wireless systems.
MEDUSA sponsored a Think Tank May 19 in Tunis focused on EGNOS in Intelligent Transport Systems (ITS).
Delegates from 10 countries met in Tunis May 19 for an “All-day-long Think Tank” organized by MEDUSA. The sixty participants represented Algeria, Belgium, Czech Republic, Egypt, Jordan, France, Italy, Morocco, Tunisia and Slovak Republic.
Focused on the Intelligent Transport Systems (ITS) market, the event addressed the advantages of satellite navigation, and particularly of EGNOS and Galileo. ITS concerns the integration of information and communication technologies to create new applications and services for transport and mobility. ITS applies to all transport modes and is oriented to both passenger and freight transport. Satellite navigation plays an important role in ITS.
The MEDUSA Think Tank opened with a keynote speech by Ammar Habib of the Ministry of Transport of Tunisia, who reaffirmed the country’s interest in the development of ITS and in the cooperation with Europe in relation to the exploitation of the services offered by the European GNSS in the various transport domains.
The Euromed and European panelists gave a wide overview of existing and emerging applications in their countries, such as tracking and tracing of dangerous goods transportation, tracking special regulated fleets, emergency call, road tolling, urban traffic management, control of service fleets, and freight transit monitoring. They presented the existing technologies and value-added services that can be delivered through EGNOS today, and services that will become more robust thanks to Galileo in the future. It was recognized that the European GNSS, EGNOS and Galileo, can provide benefits to more than European countries and that, though primarily conceived for the aviation needs, EGNOS has interesting perspectives of utilization in ITS, and particularly in those applications requiring accurate and reliable positioning.
The participants from different sectors (policy makers, users, technology and commercial players, experts) shared their experiences and lessons learned. They also had the opportunity for networking, establishing relationships, and strengthening cooperation on GNSS and ITS.
Organized in combination with the Elgazala Innovation Days 2015, an international exhibition on information and communication technologies, the Think Tank is one of the technical assistance actions undertaken by MEDUSA and in the frame of the program of GEMCO (Galileo EuroMed Cooperation Office), the regional cooperation structure in Tunis set up and operated by MEDUSA.
About MEDUSA — MEDiterranean follow-Up for EGNOS Adoption
Coordinated by Telespazio, the MEDUSA project belongs to the Euromed GNSS program, part of the Euromed Transport framework. MEDUSA aids the Euromed countries in the operational introduction and the exploitation of the European GNSS (EGNOS/Galileo) in various applications, mainly in the transport sectors. MEDUSA runs a program of technical assistance actions, aimed at capacity building, development of enablers and regional cooperation on EGNOS/Galileo.
Android Auto in the 2015 Hyundai Sonata. (Photo: Hyundai)
Hyundai has become the first car company to launch Android Auto on production vehicles. Android Auto is premiering on the 2015 Sonata with Navigation at dealerships nationwide, and will later become available on other Hyundai models.
“Android Auto aligns with Hyundai’s core interior design principles of safety, intuitiveness and simplicity,” said Dave Zuchowski, president and CEO, Hyundai Motor America. “We launched this highly anticipated feature on our best-selling Sonata, adding to our promise of value. With the launch of Android Auto, we provide more owners with the experience of cutting-edge technology.”
Android Auto not only brings a high technology experience to Hyundai owners, but also improves safety, Hyundai said. For example, at any given daylight moment across America, approximately 660,000 drivers are using cell phones or manipulating electronic devices while driving, a number that has held steady since 2010. Android Auto helps keep drivers’ eyes and attention on the road by integrating the advanced driving-related functions of the user’s smartphone with the familiar centralized screen, physical controls and microphone of their car.
Furthermore, the smartphone’s screen becomes “locked,” so drivers are not tempted to look down and interact with their phones directly while Android Auto is in use.
Hyundai lists these advantages to Android Auto:
The Google Now card-based experience provides suggested locations and travel times based on the user’s searches, calendar entries and home and office locations, as well as weather information and “now playing” information for music streamed via the phone
App software (navigation, streaming music, etc.) is automatically updated because the apps live on the phone
Natural voice recognition with Google voice actions
Owners can easily bring their personal reminders, suggested destinations, calendar appointments and music preferences with them when they get in their car
Android Auto automatically pairs with the Sonata for phone calls through Bluetooth when connected for the first time via USB
Android Auto has familiar interfaces that are easy to use and have almost no learning curve.
Fugro has been awarded a contract by subsea contractor DeepOcean for the provision of precise satellite positioning for its fleet.
The contract is valid for three years and also includes the new vessels in DeepOcean’s expanding fleet. The DeepOcean fleet will be equipped with hardware and software developed by Fugro, providing independent positioning solutions on each vessel.
Under the contract, Fugro will supply DeepOcean with three independent decimeter-level satellite navigation systems. Also part of the contract delivery are Fugro’s Starfix.G2+ system, which has a 3D accuracy approaching that of GNSS RTK systems, and Fugro’s Starfix.G4 satellite correction service.
Starfix.G2 is a GPS and GLONASS positioning system based on orbit and clock corrections generated from Fugro’s own expanded network of dual system reference stations. Starfix.G2 is a precise point positioning (PPP) technology, which distinguishes itself from the traditional differential approach as satellite errors are not lumped together but estimated per source, per satellite. The GPS/GLONASS orbit and clock corrections are computed separately, free of ionospheric and tropospheric effects.
Starfix.G4 is a GPS, GLONASS, Galileo and BeiDou positioning system based on orbit and clock corrections generated from Fugro’s network of reference stations. Like Starfix.G2, Starfix.G4 also uses PPP technology. The GPS/GLONASS/Galileo/BeiDou orbit and clock corrections are computed separately, free of ionospheric and tropospheric effects.
DeepOcean is an integrated provider of services and technologies for the subsea industry, including offshore services for oil and gas, offshore renewables and electrical power transmission industries, with offices in Norway, UK, Holland, Brazil, Mexico and Singapore.
One of the marvels of the decade is crowdsourcing. This month I look at crowdsourcing for indoor-location positioning and report findings on GPS in smartphones that provide reliable earthquake warnings. Google has had some issues with mapping crowdsourcing, leading to the temporary suspension of Map Maker. If Google can’t block inappropriate content, it does give pause.
Next, I look at connected cars. Since this fall, four out of nearly 50 self-driving cars driving throughout California have gotten into accidents. With connected vehicles about to start popping out of dealerships, the legality of hands-free driving is belatedly being examined. And, last, INRIX has released an analytics platform that will use the massive data coming from connected vehicles.
Crowdsourcing Indoors. Crowdsourcing has worked for mapping, but what about for indoor location? Sensewhere thinks it can work. The company’s indoor positioning technology learns Wi-Fi mapping through crowdsourcing. The premise is that it gets better over time, with each user’s device adding to the Sensewhere database. For instance, Sensewhere’s ability to determine the location of an office door from the building’s lobby will improve with each trip down the corridor. Although other systems may be more accurate, Sensewhere requires no infrastructure. The company claims accuracy of 10 meters or better.
Sensewhere’s solution doesn’t require the Wi-Fi mapping labor that companies like Skyhook initially undertook. Skyhook engaged in “wardriving,” a peculiar term defined by Wikipedia as “the act of searching for Wi-Fi wireless networks by a person in a moving vehicle, using a portable computer, smartphone or personal digital assistant (PDA).” The term “wardriving” originated from “wardialing,” popularized by the 1983 film War Games in which the lead character, played by Matthew Broderick, has his computer automatically dial phone numbers in search of modems, perhaps the precursor to robocalling.
Crowdsourcing for Earthquakes? The GPS in smartphones can detect the earliest signs of a quake with at least a magnitude of 7. The challenge is to distinguish an earthquake from the usual bouncing and jarring every cell phone encounters. Scientists at the U.S. Geological Survey found that if 103 phones in a defined vicinity record the same displacement, there is an overwhelming likelihood that a quake is occurring. The amount of forewarning is very small and maybe only a few seconds, but it could be enough time for a surgeon to retract a scalpel or a person to take cover.
Is Automated Hands-Free Driving Legal? Given the batch of vehicles with automated driving about to land this year and next, you’d think that the answer would be a resounding yes. But it isn’t clear. Only one state, New York, requires drivers to have one hand on the wheel at all times. The law was enacted in 1967 without the impetus of connected vehicles. A handful of states have legalized automated driving in certain instances. It would be more practical for the federal government to step in to avoid a patchwork of regulation. The automotive industry and other boosters would argue that if automated driving isn’t specifically prohibited, it is legal. However, “drivers” of automated vehicles could find themselves ticketed by police, who could deem hands-free driving as “reckless driving.”
Tapping Big Data from Connected Vehicles. Where you go in your car and what you do in it will be used by INRIX in its new Insights analytics platform. Over the years, INRIX has transformed itself from a purveyor of traffic data to a sophisticated driving and traffic analytics player. The platform will use data from connected vehicles for urban planning, retail site selection and advertising usage, leveraging real-time GPS from a network of 250 million vehicles and devices. INRIX introduced InsightsTrips, a data-as-a-service application for understanding population movement across a metropolitan area. InsightsVolume provides information on how many vehicles typically pass a location.
Android Mascot Defacing Apple’s Logo. Not even Google is impervious to spam attacks and obscene edits. Google has temporarily disabled its crowdsourcing map editing tool, Map Maker. The tool, especially important in countries that lack detailed maps, allows maps to be updated with new geographical features and roads. In April, Google improved its spam detection system in response to escalating hacking, but the company’s efforts were not enough. One recent misdeed was the renaming of a business located near the White House to “Edwards Snow Den,” a play on Edward Snowden. However, the prank that seemed to precipitate Google taking Map Maker offline was an image of the Android mascot urinating on an Apple logo that appeared on a map.
The Android mascot could have used the crowdsourced app Sit or Squat to find a more appropriate venue. Crowdsourcing knows few boundaries.
NovAtel Inc. has introduced the GPS-713 pinwheel antenna, available in two configurations: the standard GPS-713-GGG-N and the L-Band capable GPS-713-GGGL-N.
Both antennas provide enhanced Inmarsat interference rejection, allowing tracking of GNSS signals in the presence of high-powered Inmarsat transmitters typically found on marine vessels. The antennas receive GPS L1, L2, L5; GLONASS L1, L2, L3; BeiDou B1, B2; and Galileo E1, E5a/b frequencies, optimizing global satellite tracking capabilities. Customers can use either antenna for GPS-only or multi-constellation applications, providing excellent flexibility and reduced equipment costs, NovAtel said.
Designed for baselines of any length and easy installation, the phase center offset of these antennas remains constant as the azimuth and elevation angle of the satellites change. The antenna shares the same form factor as other NovAtel GPS-700 series antennas, and is enclosed in a durable, waterproof housing. Its compact, lightweight size makes it suitable for a wide variety of environments and applications.
Ship management company EuroShip Services Ltd. has installed eLoran as a backup to GPS to ensure the safety of its vessels operating off the coast of the United Kingdom.
The trial installation may lead to implementation across the full fleet of 16 vessels managed by Euroship, working routes in Northern Europe. The land-based radio navigation system is intended to seamlessly take over in the event of a GPS outage. EuroShip plans to simulate GPS outages to test eLoran provision of position, navigation and timing data automatically.
Euroship Services is one of the first ship managers to trial eLoran as a back-up to its GNSS. The company manages vessels owned by Cobelfret. They are mostly shortsea vessels, operating in and out of port, frequently in congested waters and with bridge teams that rely heavily on bridge systems for situational awareness.
Euroship managing director Frank Davies told Lloyd’s List that the company has so far been impressed with the first trial system on one of the company’s vessels. He said that with the company’s vessels entering and exiting large European ports, crews have even noticed distorted GPS signals while going under bridges.
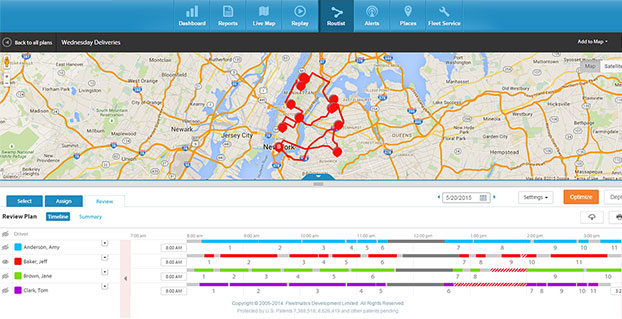
A new routing program from Fleetmatics Group is coming this summer. Fleetmatics Routist is an intelligent routing optimization solution that systematically builds the most cost-effective, customer-friendly routes for fleets.
Fleetmatics Routist seamlessly calculates and deploys route plans to drivers in the field, and features real-time and historical data that gives users the most holistic view into routing performance, the company said.
Fleetmatics Routist operates by taking locations, vehicles, time windows, technician skills, and costs and capacities into consideration, among other inputs, while remaining simple and intuitive for customers to use. Fleetmatics Routist also incorporates historical traffic data into its algorithm, elevating traffic and routing optimization effectiveness for customers operating in metropolitan areas.
“Inefficient routing wastes minutes, miles and money, leaving on-time arrivals and important elements of customer satisfaction to chance,” said Jill Ward, president and chief operating officer of Fleetmatics. “Customers that choose Fleetmatics Routist won’t have to worry about manual or time-consuming routing, and we fully expect the benefits will extend to their customers, as well.”
Fleetmatics Routist’s robust feature set, offered to customers as an add-on module, will integrate into the Fleetmatics REVEAL fleet management solution, helping it to become one of the most effective routing optimization solutions known to be available today. Customers can import work orders from electronic files or integration with their order management software, select the drivers involved in the plan, and get a cost efficient and customer satisfying route, Fleetmatics said.
Route planners can make adjustments to the plan based on their own business insight, and then deploy to the field. Route plans can be delivered effortlessly to drivers via the Fleetmatics REVEAL Field Application for smartphone and mobile devices, via Garmin integrated devices or simple route sheets printed at the office.
Once the routes are live, dispatchers and managers stay current on a driver’s progress against route stops in real-time on the Fleetmatics REVEAL live map and can make real-time adjustments as needed. When the day is done, actual versus plan analysis is available to compare the stops made by drivers against the work orders provided, so managers can provide appropriate coaching around route deviations and the impact of field activity on customer satisfaction.
Register here to receive additional information and notice of Fleetmatics Routist’s availability.