Analysis of Signal Tracking Techniques for Multipath Mitigation
By Antonio Fernández, Mariano Wis, Pau Closas, Carles Fernández-Prades, José A. García, Francesca Zanier, and Massimo Crisci

GETTING RID OF A NUISANCE. No, I’m not talking about your neighbor’s barking dog or the IT guy when he shows up to fiddle, yet again, with your computer. I’m talking about multipath. What is multipath, you ask? Herewith, Multipath 101. When a radio signal travels from a transmitting antenna to a receiving antenna, it will follow a direct line-of-sight path. But the signal might also travel to the receiving antenna after being reflected off a nearby building, say, resulting in a delayed signal or echo along with the line-of-sight one. Those of us of a certain age will remember ghost images on the screens of TVs connected to “rabbit ears” or outdoor antennas. That was multipath. These days, with TV signals primarily delivered by cable and satellite, we don’t see multipath much anymore. But we do hear it in our cars, from time to time, while listening to FM radio. Although the FM “capture effect” provides some margin against multipath, it is not uncommon to lose stereo reception or to experience fading out of the signal while driving in built-up areas as a result of reflections.
This same multipath phenomenon also affects GNSS signals. Unlike satellite TV antennas, the antennas feeding our GNSS receivers are omnidirectional. So we have the possibility of not only receiving a direct, line-of-sight signal from a GNSS satellite but also any indirect signal from the satellite that gets reflected off nearby buildings or other objects or even the ground. The related phenomena of diffraction and scattering can also generate multipath signals.
In a GNSS receiver, the line-of-sight and multipath signals combine to corrupt tracking of the line-of-sight signal resulting in increased pseudorange and carrier-phase measurement errors.
GNSS antenna and receiver manufacturers have developed techniques to minimize some of the impact of multipath on the GNSS observables. And tracking of some of the newer GNSS signals is a bit more resistant to multipath. But multipath, at some level, is still a problem looking for a better solution.
This brings us to ARTEMISA, which stands for Advanced Receiver Techniques: Multiprocessing Algorithms. It’s a European initiative to develop techniques to minimize the effects of multipath in GNSS receivers. For those of you who are a little rusty on your Greek mythology, Artemis (or Artemisa in Spanish — after all, she was a woman) was the Greek goddess of the hunt. You might better know her Roman equivalent: Diana. Her parents were Zeus and Leto, and Apollo was her twin brother. She is often depicted carrying a bow and arrows. How appropriate a name for a project whose goal is to try to kill off the effects of multipath in GNSS receivers.
In this month’s column, the team of researchers involved with ARTEMISA describe their efforts to generate synthetic multipath for GPS L1 and Galileo E1 signals and to test different signal tracking techniques in a simulated receiver to see which techniques best minimize the effects of multipath on positioning solutions and which might be feasible candidates for incorporating in real receivers. The hunt is on.
GNSS navigation in urban environments is usually challenged by a number of effects such as multipath and weak signal conditions. In particular, the pernicious effects of multipath on signal tracking and system accuracy are widely known. To mitigate these effects, there is a series of techniques that range from modified antenna design to combining the GNSS receiver with other sensors or subsystems. Another possibility is to implement advanced tracking techniques specifically designed for these purposes. Such techniques usually impose computational load and implementation complexity, which make them hard to implement in an application-specific-integrated-circuit-based receiver. However, given the current advances in computer technology and the possibilities of field-programmable-gate-array- (FPGA-)based hardware, it is possible to implement these new techniques in an operational receiver.
We have studied this possibility as part of the ARTEMISA project, carried out by DEIMOS Space and the Centre Tecnològic de Telecomunicacions de Catalunya, and supervised by the European Space Agency’s European Space Research and Technology Centre. We have implemented and tested a series of innovative techniques that are able to cope with, and even to estimate, multipath (MP) parameters, using a simulated software receiver based on the GRANADA (Galileo Receiver Analysis and Design Application) GNSS blockset for MathWork’s Simulink graphical programming language tool. These techniques are based on the maximum likelihood principle (as implemented in the Multipath Estimating Delay Lock Loop) or on online Bayesian techniques for the estimation of multipath (as implemented in the Multipath Estimating Particle Filter), involving architectural modifications of the tracking loops (as in vector tracking loops), or even constituting a new paradigm in receiver design (direct position estimation).
Our effort in this project has focused on two main tasks. The first task is the design and development of the simulation platform, the techniques to be tested, and a multipath model representative of the urban environment. The second task involves a simulation campaign that has been carried out to test the different techniques and to contrast the results obtained against the legacy delay lock loop / phase lock loop (DLL/PLL) tracking loop schemes. This article describes these tasks and some of the results we have obtained so far.
Keep in mind that at the time of writing, ARTEMISA is still ongoing. Therefore, more results are expected up until the end of the project.
Simulation Platform
The simulation platform has been developed in Matlab/Simulink with DEIMOS Engenharia’s GRANADA GNSS Blockset. This blockset is a collection of Simulink models and blocks that can be used to design and simulate any kind of GNSS receiver. The main block is the Factor Correlator Model (FCM), which implements the set of correlators through an analytical (set of equations) model. Carrier phase, code misalignment, autocorrelation function, and even the correlated noise and the multipath at the output of every virtual correlator are simulated for a given input trajectory. On the other hand, the tracking loops are implemented as independent modules representative of an actual receiver. This semi-analytical approach has the advantage of performing a fast simulation of the correlator output without the need for implementing the baseband correlation operation. In addition, its implementation in Simulink allows for the development of innovative tracking schemes. This approach also matches with the ARTEMISA project concept, where a series of innovative tracking loops has been implemented with the aim of replacing or improving conventional PLL/DLL schemes.
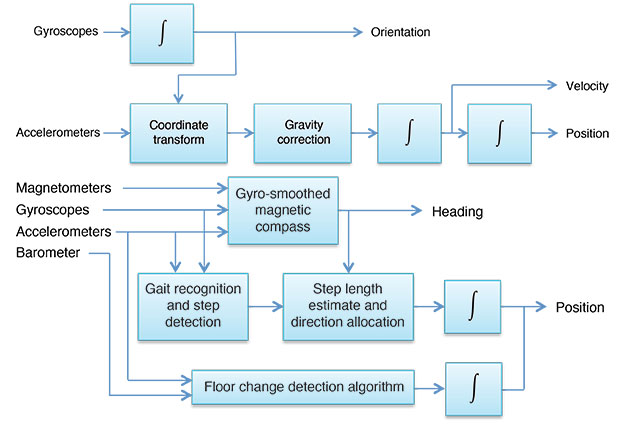
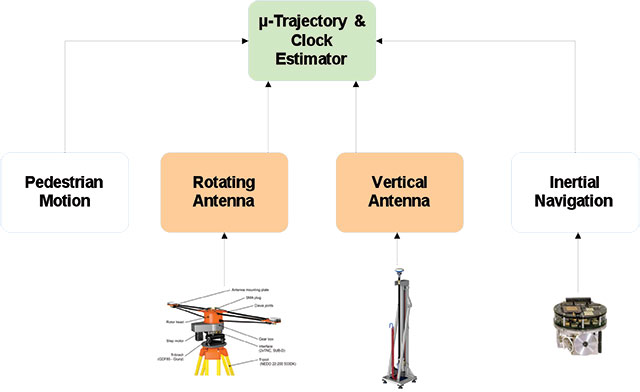
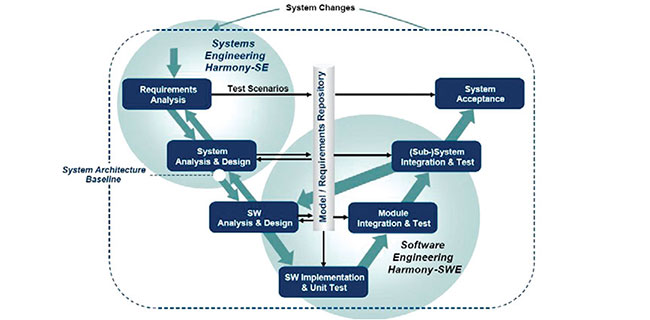
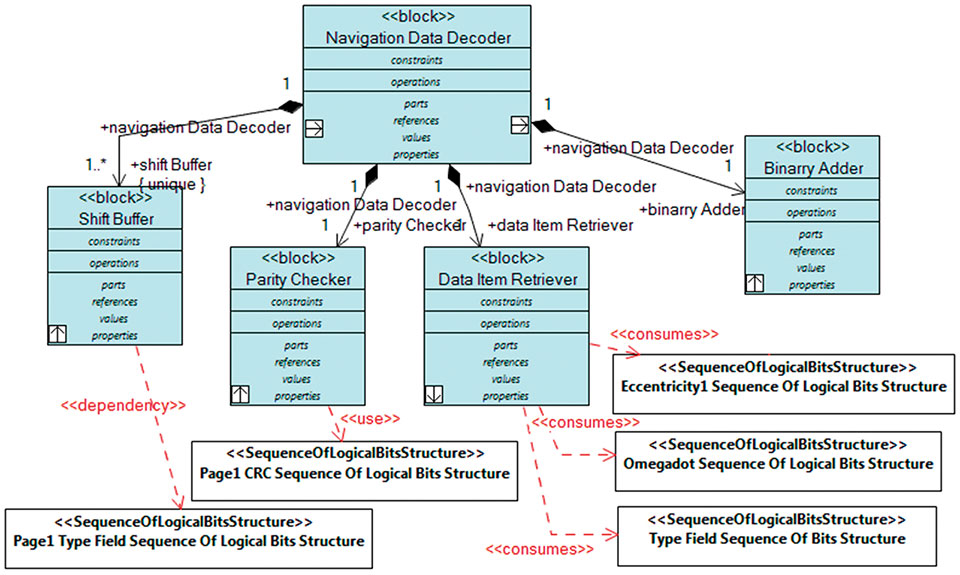
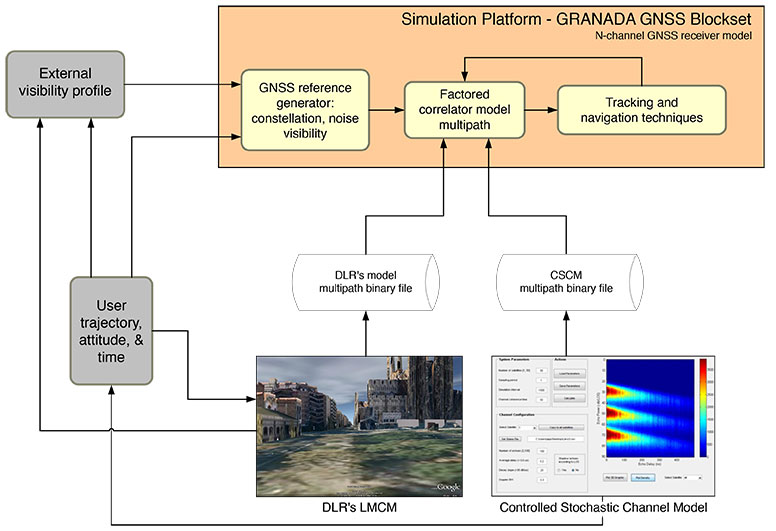
The main architecture of the simulation platform is shown in FIGURE 1. We use an external trajectory file to generate the reference data that will be used with the FCM block to generate the correlator output that will feed the tracking loop blocks. These trajectory files are also used to feed the multipath scenario generators, to test each technique under a number of defined scenarios so that we can assess their performances and find their limitations under multipath.
We used two statistical models for the description of the signal propagation: the Controlled Stochastic Channel Model (CSCM), which is a modification of the Land Mobile Satellite channel developed by Pérez-Fontán, and the well-known Land Mobile Channel Model, developed by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt or DLR); see Further Reading. These models generate a series of scenario files, which can be loaded into the FCM to introduce the multipath effects in the correlator output.
These two statistical models are complementary. The CSCM model allows the user to set the multipath channel characteristics to be able to stress the tracking technique, while the DLR model permits evaluation of the technique’s response in realistic conditions.
A deterministic user-defined multipath generator was implemented to check the response of the tracking techniques under well-defined multipath conditions. The Multipath Error Envelope (MPEE) was also computed to evaluate the response of the technique under one echo with varying delay conditions.
The purpose of this article is not to explain all the developments performed with the platform. It focuses on the results obtained with the deterministic and statistical channel model. For this reason, the development of the CSCM generator will be explained in detail.
Controlled Stochastic Channel Model
The CSCM module was specifically created for this project. Its purpose is to generate a stochastic channel, but with the capability to control the multipath power levels and the number of echoes generated in the scenario, thus creating a set of realistic multipath signals, but with the capability of being easily controlled by the user. Time series for multipath echoes are generated, following a Rice or Rayleigh stochastic model, but the mean power levels, the amplification K factors, and the power switching times are chosen by the user.
The model allows the selection of the number of satellites (channels) that are generated in the model, the sampling period (related to the loop integration time), the length of the simulation, the receiver speed, the signal carrier frequency, and channel specific parameters such as the number of echoes, the average delay of the echoes and the decay slope (echo power loss ratio with signal delay).
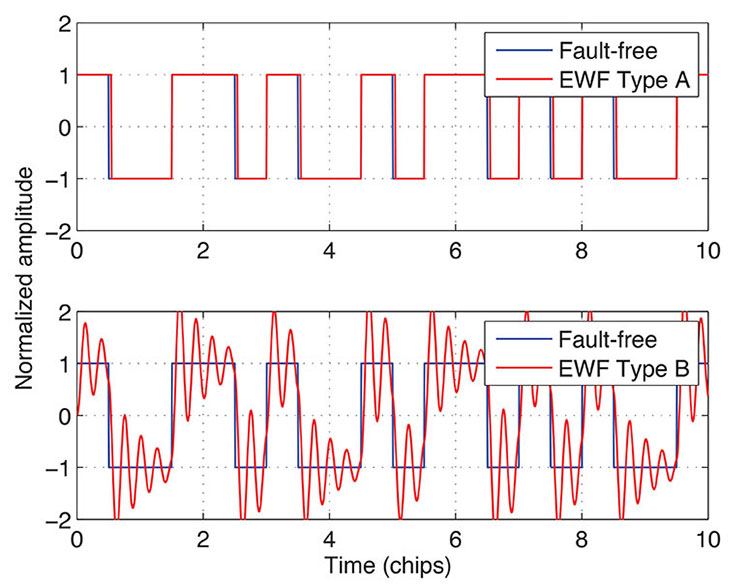
One of the parameters the user can set implicitly is the multipath echo lifetime. What the user really sets is the channel transition time, or the time during which the channel keeps the multipath configuration. Every time the transition time is changed, a series of multipath echoes are canceled and other ones appear. This set of disappearing/appearing echoes is performed in pairs in such a way that the transition between echoes is smooth. FIGURE 2 illustrates this mechanism.
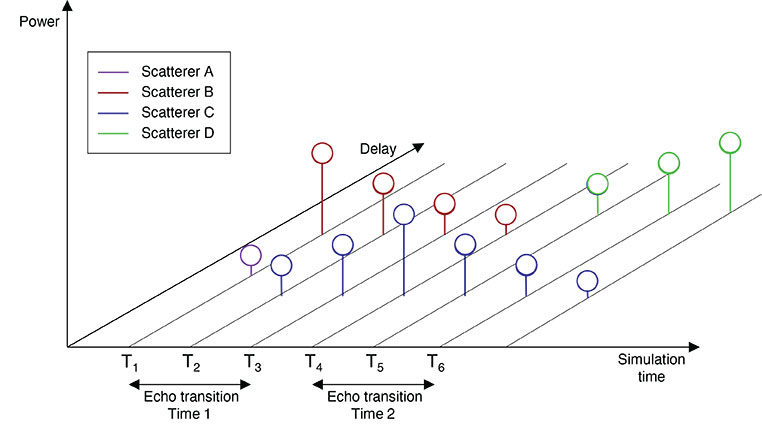
When an echo is disappearing (a red one in the figure), its associated echo is at its maximum value (a blue scatterer). In the next interval, a new echo appears in a different delay position (a green one) and the associated scatterer begins to decrease its power. This mechanism allows the user to easily associate the transition time to half the multipath echo lifetime.
Simulation Plan
The simulation plan is structured into different stages. The first stage of the simulation plan is based on the controlled multipath environment, with specific tests for each technique. The purpose of this stage is the tuning up of the techniques. As an example, for the Multipath Estimating Delay Lock Loop (MEDLL) technique, parameters such as the precorrelation bandwidth, the number of MEDLL iterations or the number of assumed multipath echoes are parameters that are adjusted after these tests are carried out. Another purpose of this first stage is to check the performance of the techniques under deterministic, fully controlled multipath. Parameters like signal-to-multipath ratio, multipath delay, and the number of multipath echoes can be controlled at any time.
Another test is the generation of the multipath envelope error plot. The utility of this test is to find the optimal configuration of the correlator position for each kind of signal, which is a trade-off between the obtained root-mean-square error (RMSE) and the number of correlators. This procedure is repeated for each signal considered in the plan.
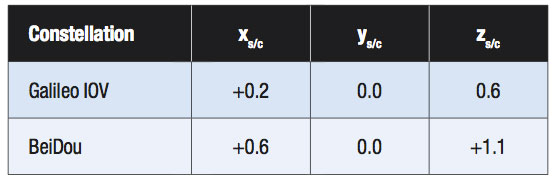
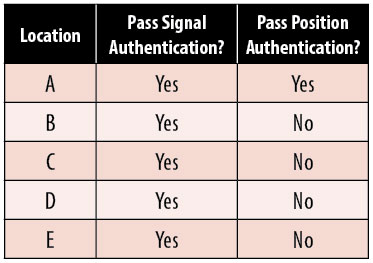
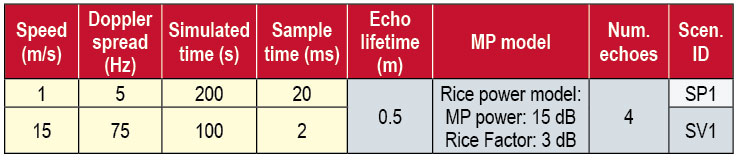
The next stage of the simulation plan is the test with the CSCM model. This test consists of the generation of a series of scenarios characterized by the stochastic model, the number of echoes, and the user receiver dynamics. Scenarios presented in this article are shown in TABLE 1. Two types of user environments are defined: one for pedestrian and one for vehicular receivers. The dynamics (user speed) define the integration (sampling time) and the multipath Doppler spread. The stochastic model parameters include the type of stochastic model for the line-of-sight signal (LOSS) and multipath echoes, mean power level, and amplification K factor. These scenarios represent a moderate multipath level with four echoes.
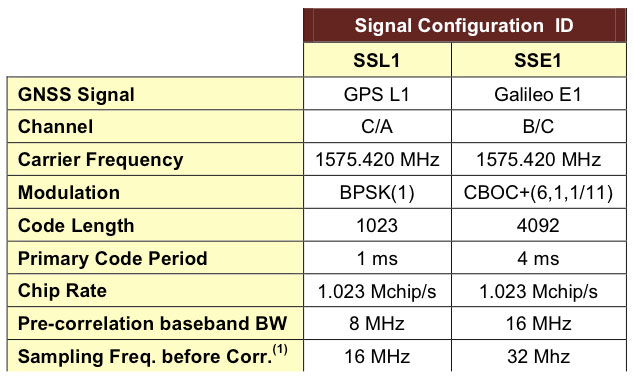
Each scenario was run with different settings of carrier-to-noise-density ratio (C/N0) and with all the signals that were planned for the project: GPS L1 C/A, GPS L5, Galileo E1 and Galileo E5. In this article, we focus on L1 band signals, analyzing the results for GPS L1 and Galileo E1.
The final stage in the simulation plan is testing each technique under realistic channel conditions with the DLR model. In this case, an urban scenario is set, assuming two types of receiver dynamics (a pedestrian user and a vehicular user). No more details about this stage are given because these tests are currently ongoing.
Technique Descriptions
After an initial evaluation of the candidate techniques, the following techniques were selected for implementation and testing in the project.
Multipath Estimating Delay Lock Loop. MEDLL was proposed by Van Nee (see Further Reading). It is a robust statistical approach to the multipath problem, where the maximum likelihood principle is applied to a signal model consisting of LOSS and M-1 multipath rays or echoes. The key idea is to perform the estimation of the whole set of parameters of the incoming signals (that is, amplitude, delay, and phase) in an iterative manner. When their amplitudes, time delays, and carrier phases are estimated, the effect of the reflections in the correlation can be removed. Applying standard assumptions, the maximization of the likelihood function yields a set of interrelated equations from which one can estimate iteratively the LOSS and multipath parameters. The implementation of MEDLL considers a similar architecture as conventional DLLs, although in practice more than three correlators per loop are required for effective multipath mitigation. Despite its demanding requirements in terms of a large number of correlators and computational load, MEDLL was successfully implemented in NovAtel receivers because of its excellent performance in multipath mitigation.
The contributions of all signals (that is, LOSS and an unknown number of echoes) are not calculated simultaneously from the outset. First, the contribution of only one signal is calculated, then the contribution of a second signal is added with the contributions of both signals being optimized, then the contribution of a third signal is added and the contributions of all three signals are optimized, and so on. The process is repeated until a suitable stop criterion is fulfilled. A possible approach for deciding when to stop adding more rays to the signal model is to detect when the error increases; that is, observing that the signal-to-residual ratio when considering an extra path decreases with respect to the case of not considering it, or reaching a maximum number of considered paths, which is a design parameter of this technique.
Multipath Estimating Particle Filter. The MEPF shares with MEDLL the philosophy of estimating the parameters of multipath to mitigate its effect. The main difference is that in this case the statistical principle is not the ML (as in MEDLL) but Bayesian filtering. Here the term Bayesian means that the algorithm is using some sort of a priori information regarding these parameters (such as interdependencies and time evolution models). Therefore, instead of assuming that each integration period is independent of the others, a first-order Markov process is assumed for the unknown parameters (that is, amplitude, delay, and phase). The resulting problem is formulated as a nonlinear state-space model and can be solved by means of a Rao-Blackwellized particle filtering method.
The MEPF has a relatively high computational load, which is a function of the number of particles (Np), the number of correlation points, and the number of rays to be estimated (M). In all cases, the larger the values the more computationally demanding the algorithm is. According to the simulations performed, configurations with Np larger than 2000 are not worthwhile, because it implies a high computational cost and the results do not improve significantly the accuracy of a GNSS receiver. Also notice that the dimension of the state-space to be estimated is 3 × M ([amplitude, phase, delay] × M), and thus estimating an additional multipath ray implies augmenting the dimensionality by three. Theoretically, the convergence results of particle filters are independent of the dimensionality of the problem. However, it is agreed that in practice these methods fail when the problem increases in dimension. Therefore, setting M larger than 5 is not reasonable since the number of particles required for convergence would be too large to consider its implementation in a receiver.
Vector Tracking Loops. A conventional GNSS receiver consists of several parallel scalar DLLs, each of which independently estimates the individual pseudoranges. The parallel set of measured pseudoranges (plus Doppler or accumulated delta range measurements on the carrier) are then fed to a Kalman filter estimator, and thus each DLL effectively produces an independent estimate for each of the N pseudoranges for each of the N satellites. However, not all of their measurements are truly independent, although they are treated as such by the DLL, and if there are more than four measurements being made and four or fewer unknowns, the system is overdetermined. Furthermore, the geometry of the satellite-user paths generally prevents the measurements from being truly independent.
The concept of vector tracking loops firstly appeared in the early 1980s. Recently, the method has attracted the attention of many researchers (see Further Reading) due to its good performance in weak signal scenarios.
In this article, we present the implementation of a vector tracking loop that works with pseudorange and pseudorange-rate measurements and provides estimations for position, velocity, receiver clock error, and receiver clock drift. The vector loop has been integrated in a basic receiver based on the classical DLL and PLL/frequency lock loop (FLL)-assisted architecture, acting as an overlay procedure, which activates automatically once the basic receiver has obtained the first position fix. Then, the position/velocity/time solution is used to jointly estimate the synchronization parameters (time delay and carrier phase) for each of the received GNSS signals by means of an extended Kalman filter, and those values are re-injected into the tracking loop. By using position for deriving such synchronization parameters, the algorithm exploits the problem’s inherent geometric constraints, processing all the channels jointly and providing robustness in scenarios with weak receiving power, high multipath, or fast fading.
Direct Position Estimation. Although the conventional two-step position determination is the approach taken traditionally, it is seen to have a number of drawbacks. In contrast, direct position estimation (DPE for short) proposes an alternative where the estimation of a user’s position is performed directly from the received and sampled signal, thus avoiding intermediate steps and jointly considering signals from all satellites when estimating the position solution. By merging the two-step approach into a single estimation problem, DPE addresses some of the inherent drawbacks of the conventional approach where the dependencies between channels are efficiently exploited, in the sense that signals from visible satellites are jointly processed to obtain the user’s position. At the time of writing, this technique is being implemented and its analysis is left for future publications.
Results
Not all the results that we have obtained have been included in this article; only the most relevant ones for L1/E1 CBOC and BPSK signals are given.
MEDLL. Optimal Correlator Configuration. As stated previously, the test consisted of executing different correlator configurations. TABLE 3 shows the correlator configuration ID, the number of correlation samples, and the location of the late correlators with respect to the prompt one and normalized to the chip time (Tc). The corresponding early samples are defined analogously. For all these configurations, it is assumed that there is a correlator at zero chips.
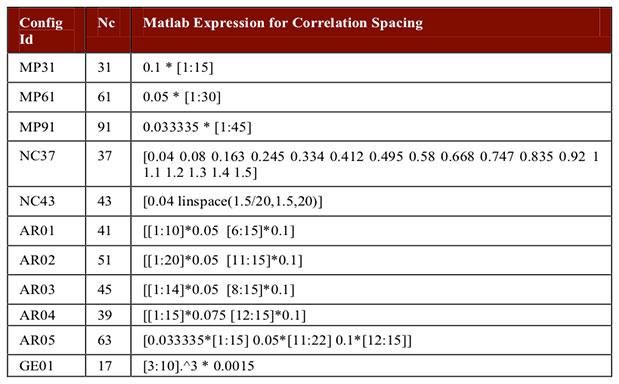
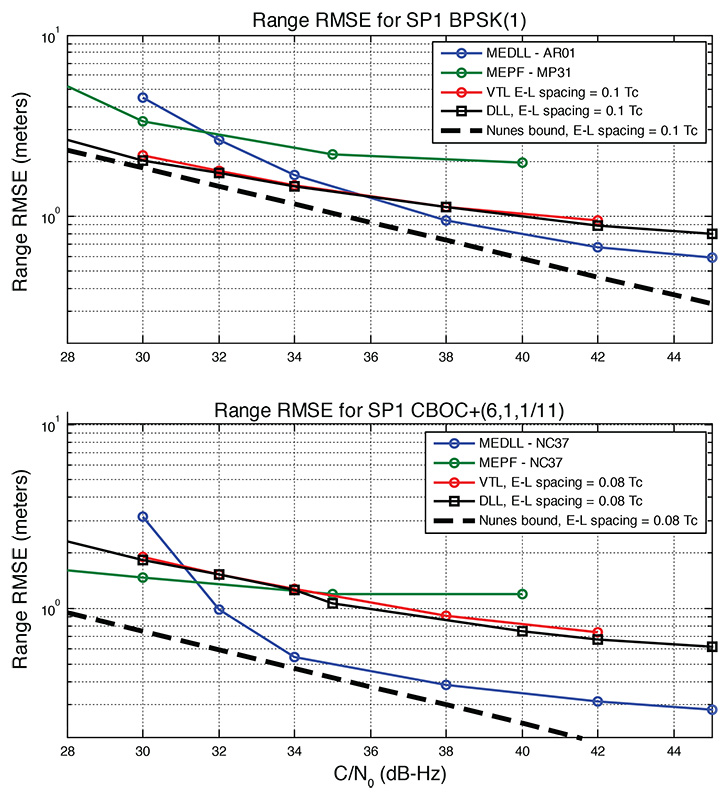
These configurations were selected in order to test different possibilities as regular spacing between correlators (MP31, MP61, or MP91), setting the correlators to inflexion points of the autocorrelation function (ACF) (NC37 or NC43 for CBOC modulation), or variable spacing (as configurations AR01 to AR05 and GE01) that optimize the number of correlators. The results of the tests can be observed in FIGURE 3 for a BPSK(1) signal and for a CBOC(6,1,1/11) signal.
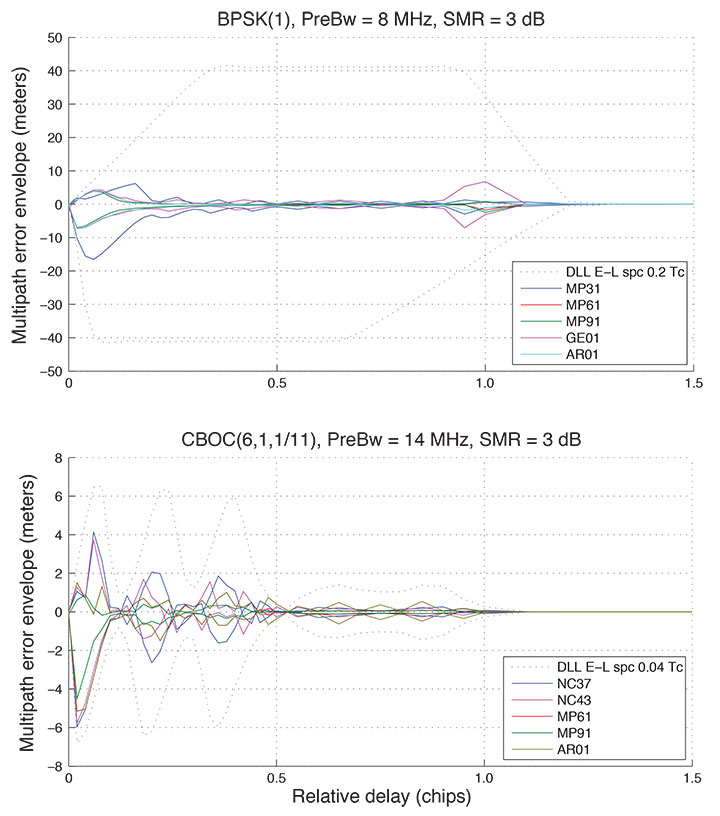
In general, it is observed that the greater the number of correlators, the smaller is the spacing and therefore, the area covered by the multipath error envelope is smaller. However, the greater the number of correlators, the greater is the processing time. Therefore, it is necessary to find an optimal configuration that best fits the multipath variation.
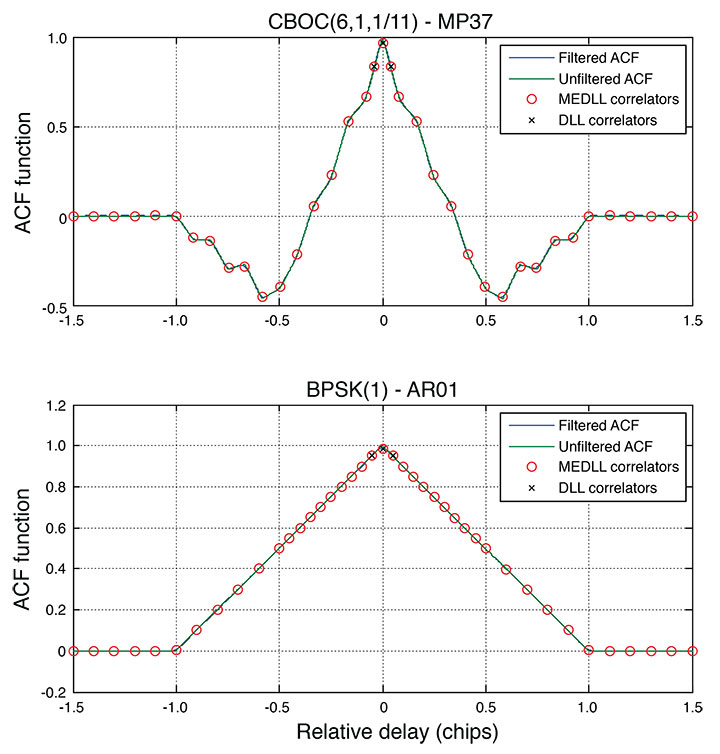
After having analyzed the tests for these configurations, we found that the optimal configurations are AR01 for the BPSK signal and NC37 for the CBOC(6,1,1/11) signal. These configurations are shown in FIGUR 4, and were used for the remaining tests.
CSCM. As mentioned in the simulation plan description, the tests for a pedestrian and a vehicular user in a moderate multipath environment were performed with a scenario file generated with the CSCM tool. These scenarios are characterized by a series of multipath echo levels, number of echoes, and specific stochastic models that are detailed in Table 1. In this table, the pedestrian scenario is known as SP1 and the vehicular scenario is shown as SV1. The results with these scenarios are presented in this article.
The RMSE for range estimates in these scenarios is shown in FIGURE 5 for SP1 and SV1. For comparison, these plots show also the theoretical lower bound (Nunes bound) computed for each technique.
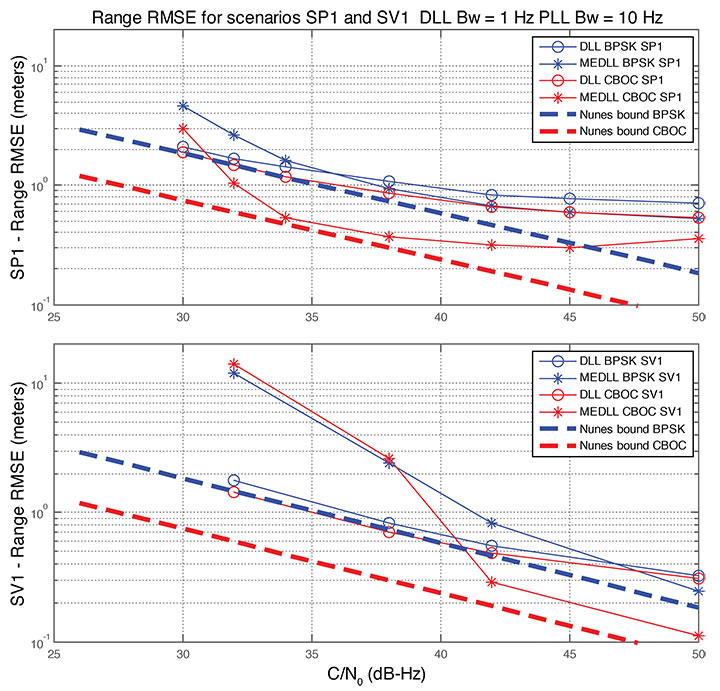
The plots show that MEDLL outperforms the conventional DLL results above a minimum C/N0 value. This happens beyond 32 dB-Hz for a CBOC signal and 35 dB-Hz for a BPSK(1) signal for low dynamics (pedestrian) environments.
In the case of vehicle scenarios such as SV1, it is observed that it requires significantly higher values of C/N0 in order to outperform the DLL RMSE. This result makes the technique impractical for vehicular applications.
Time Performance. A collateral result that has been obtained with CSCM scenarios is the time performance of the technique, compared to the legacy DLL/PLL scheme. The ratios of the execution times needed for the techniques have been computed. This is an indicative measure of the computational load. The time performance of MEDLL with the selected correlator configuration against DLL is 10:1. That is, 10 times more time is required for the MEDLL technique than the DLL to run the same scenario. It is also observed that the ratio for BPSK modulation is slightly larger than the ratio for the CBOC signal, because more correlators are used in that case.
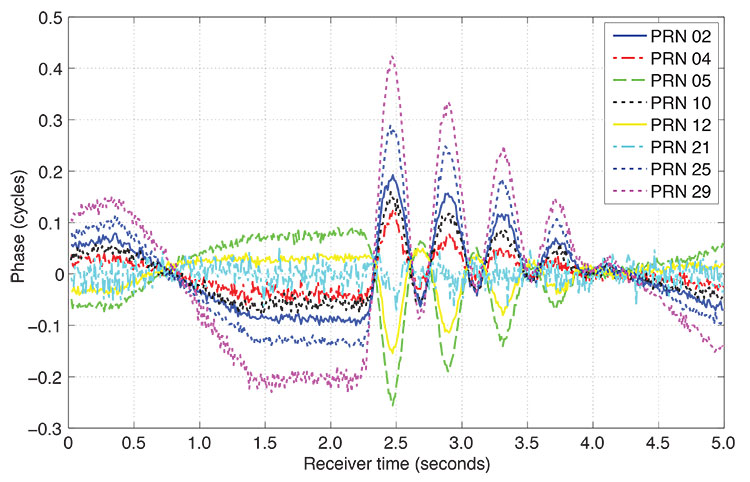
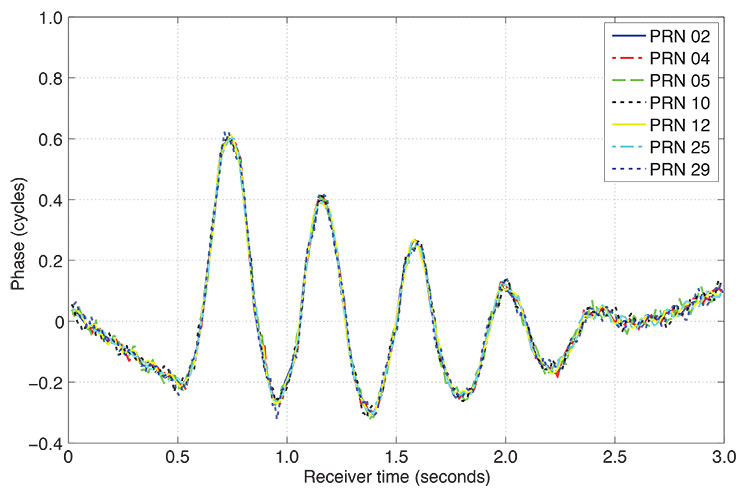
MEPF. Performance Under Controlled Channel. FIGURE 6 shows an example of the performance of the MEPF technique tested in a controlled channel environment.
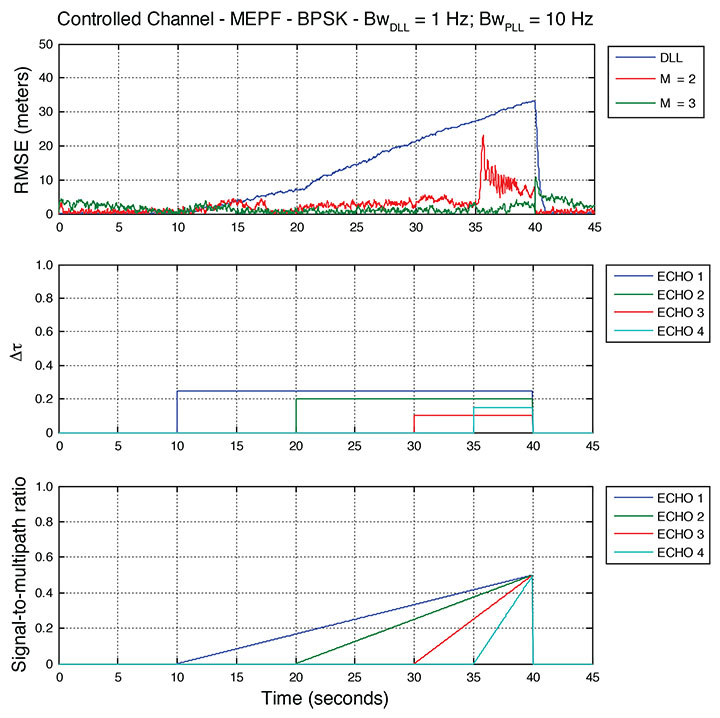
It can be observed how the DLL/PLL technique has an error, which grows as the number of rays is increased. However, when the MEPF is applied, it can be observed how the technique is capable of dealing with a multipath-changing environment despite the fact that it is varying in time with the number of rays increasing. It can also be noticed that the response of the technique is practically the same independent of the number of estimated rays (M). These results were achieved with a BPSK signal and 500 particles.
Covariance Matrix Adjustment. Before starting the specific test for the evaluation of the scenario performance, it is necessary to calibrate the particle filter. The calibration procedure consists of the adjustment of the process covariance matrix. The observation covariance can be adjusted, simply by analyzing the raw observables, or it can even be done automatically.
The critical point is the adjustment of the states’ covariance. It has been observed that an improper adjustment of the covariance may cause an increment in the range RMSE or even the divergence of the filter. For that reason, a systematic procedure for the adjustment of the covariance matrix has been followed. This procedure evaluates the performance using different configurations of the covariance matrices of the line-of-sight and multipath parameters in two stages, and allows us to find a set of optimal values for each scenario.
Optimal Correlator Configuration. We also analyzed the optimal correlator configuration for the MEPF technique. A number of configurations in Table 3 were used under CSCM scenarios. It was found that the correlator configuration does not have a strong influence on the performance of the MEPF technique. It is worth mentioning that in cases where fewer than five correlators were used, the performance degraded. Despite the weak influence of the range RMSE with the correlator configuration, it was observed that there is a minimum for the BPSK signal that can be chosen for the MEPF technique (MP31). For the CBOC signal, the same configuration used for MEDLL is finally chosen (NC37), provided that it is the optimal configuration that balances range RMSE and the number of correlators.
Number of Particles. It is important to notice that an initial set of tests was performed with 500 particles. However, it was found that by increasing the number of particles to 2000, the performance of the technique with CSCM was remarkably better. Because of this, for the remaining tests using the CSCM, this number of particles was the default value. Using a higher number is not worthwhile since results are not much improved and the computational load becomes too high.
CSCM Results. The range RMSE results for the pedestrian scenario SP1 with the MEPF technique are shown in FIGURE 7. In this case, it is observed that for the CBOC signal, MEPF outperforms the DLL/PLL technique for low C/N0 values. This result could not be reproduced for the BPSK signal because of the adjustment of the covariance matrix, which in this test was optimized for CBOC.
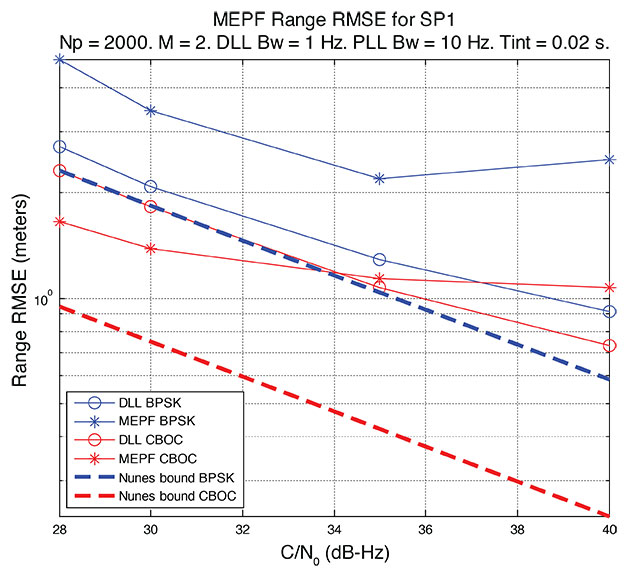
These promising results for CBOC open the possibility of using this technique in applications where the LOSS is very weak or where the multipath signals are very strong. More tests with this technique are currently being executed for a better adjustment of covariance settings for BPSK.
Time Performance. The previous time performance analysis was performed with the MEPF technique. The performance ranges among 180:1 and 340:1, when compared to DLL/PLL schemes using three correlation samples. The extremely long time required to simulate the scenario makes this technique inadvisable for implementation within an operational receiver using current technology.
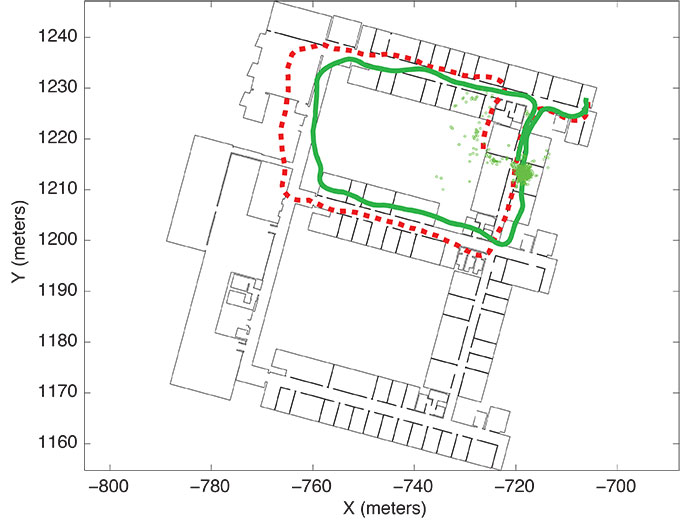
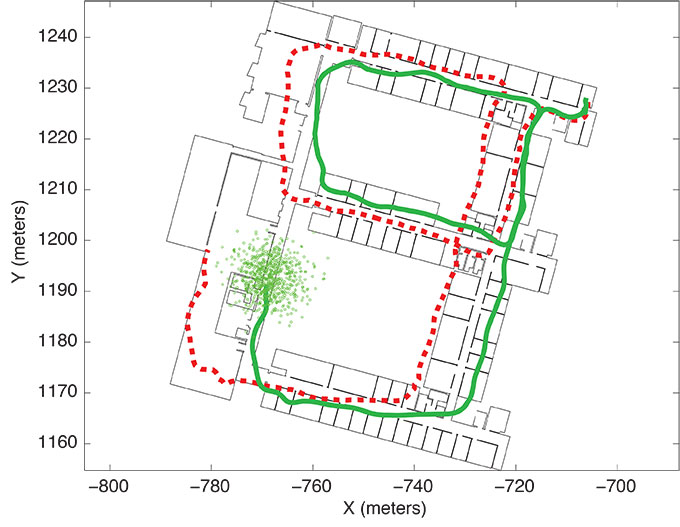
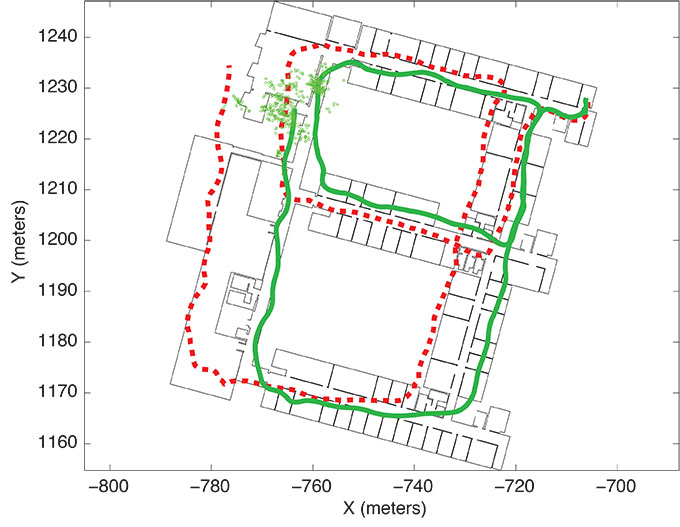
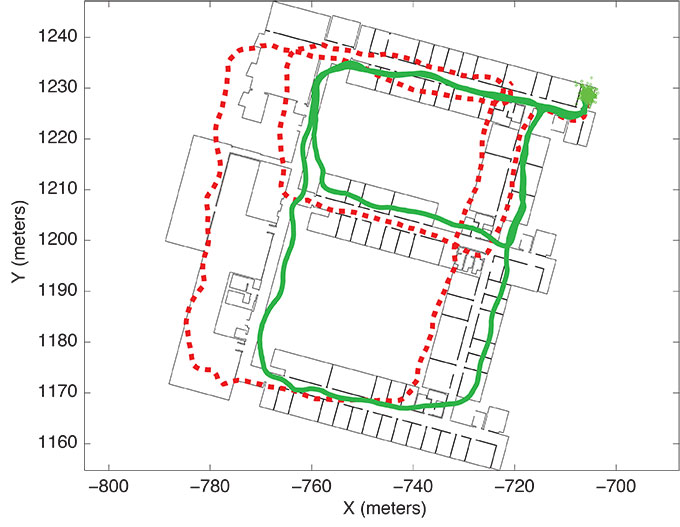
VTL. CSCM Results. The same CSCM scenarios were performed for the VTL technique, but using a multi-channel receiver. Results for pedestrian SP1 and vehicular SV1 scenarios are shown in FIGURE 8.
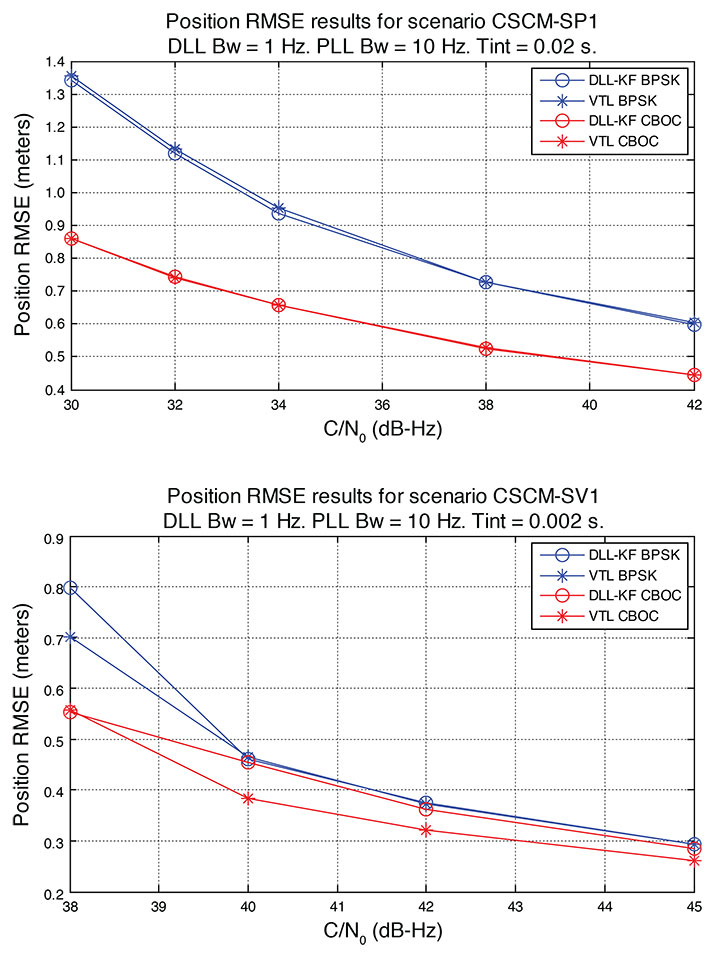
It must be noted that, in order to perform fair comparisons, the results of ordinary DLL/PLL tracking used a conventional KF for the computation of the position instead of the least squares module available in the GRANADA GNSS Blockset.
In our numerical simulations, a significant improvement in the performance of VTL with respect to the DLL/PLL+KF scheme was not observed in pedestrian environments, due to the low dynamics. Under those dynamic conditions, both systems exhibited similar (statistically equivalent) behavior.
In the case of scenario SV1, the velocity applied to the receiver was higher than in the pedestrian case, and the VTL exhibited a remarkable improvement over the DLL/PLL+KF-based receiver. For the BPSK modulation, it was observed that for low values of C/N0 , the VTL performs better than DLL/PLL+KF. However, for stronger signals, both techniques have the same behavior as shown for the pedestrian scenario results. On the other hand, for the CBOC modulation, it is observed that VTL performs better than DLL/PLL+KF for the whole range of C/N0 values. The precorrelation bandwidth was set to 8 MHz in the case of BPSK, while for CBOC it was set to 14 MHz. That wider bandwidth of the CBOC receiver has an impact in the estimation of the measurements covariance matrix. In can be observed that in such higher dynamic stress conditions, the VTL outperformed DLL/PLL+KF in our numerical simulations.
It must be mentioned that for all the simulations, we assumed the same C/N0 for all satellites. However, we plan to run tests with LOSS fading (variation of C/N0). It is expected that the VTL technique will show its advantage in those simulations.
It was also observed that settings of the KF covariance have an important effect on the results. This covariance must be adjusted according to the multipath signal level. Therefore, a calibration operation, which adapts the KF to a particular scenario should be performed. While the measurement covariance matrix can be adaptively estimated from the output of the DLLs and the PLLs, the process covariance matrix should be adjusted depending on the trajectory characteristics.
Time Performance. The time performance analysis also shows that the time performances of VTL and DLL/PLL+KF are very similar. Only a small increment of 15% of the computational cost for vehicular scenarios has been observed. This makes this technique a good candidate to be implemented in an operational software-based receiver.
Results Overview
After analyzing the current results from the different techniques, some general conclusions on their performance can be made.
MEDLL can be useful to mitigate and improve the pseudorange measurement provided that the C/N0 value is greater than a threshold value. An intuitive reasoning for this is that the estimation of multipath rays is easier at high C/N0 values. Below this value, the MEDLL technique does not present an important advantage over ordinary DLL/PLL given the time performance it has (a ratio of 10:1). MEDLL is especially well-suited for static and pedestrian environments.
MEPF is a technique that still needs research before it can be used operatively. Results show that it works quite well for low C/N0 values when compared to DLL/PLL. Results show that for the CBOC signal, at least 2000 particles are needed to give good results for low C/N0 values. However, its time performance is very poor (around 200:1 with respect to DLL with 2000 particles)
VTL does not present an advantage in the pseudorange measurement domain, but it clearly improves the position solution with respect to a classical DLL/PLL+KF tracker. This improvement is remarkable under dynamic conditions. It is also observed that the time performance is very similar to the DLL/PLL+KF one. Therefore this technique is a good candidate for implementation in a receiver prototype based on embedded hardware, an FPGA implementation, or software-based radio.
For the sake of completeness, a performance comparison in the range domain of the different techniques with the BPSK and CBOC signals for the pedestrian SP1 scenario are presented in FIGURE 9. The metric used is the range RMSE.
Conclusions and Future Work
This article has presented a series of innovative multipath-estimating techniques using non-conventional approaches in the tracking algorithms. These non-conventional approaches are based on maximum likelihood (MEDLL) or non-linear online filtering algorithms (MEPF). Alternative approaches in the positioning algorithms have also been analyzed (VTL and DPE).
To check the performance of these techniques, we have developed a simulation platform, able to carry out deterministic multipath simulations, in which the multipath environment can be controlled deterministically, and stochastic simulations based on tested multipath models (CSCM and DLR). The CSCM model is capable of simulating realistic multipath environments but with the capability to control the multipath ray parameters and the number of these rays. The DLR model allows us to perform simulations based on the conditions in realistic urban environments.
This article has focused on the CSCM model. It shows simulations for a pedestrian and a vehicular scenario that represent typical dynamic conditions for each kind of user.
These results show that the MEDLL technique performs very well in a static multipath environment under low dynamics with good visibility conditions.
Concerning the MEPF, it has been found that the adjustment of the covariance for the observables is very important for achieving good results for the range RMSE. If this adjustment is done well, the results for low values of C/N0 outperform the ordinary DLL/PLL technique. This adjustment has been successfully achieved for a CBOC signal, but a BPSK signal still requires additional work. This may open the possibility of using this technique in applications in which the LOSS is very weak.
It has also been observed that the VTL technique is very effective in high dynamics applications and noisy environments, provided that the internal KF process noise covariance has been properly estimated. VTL also shows a performance very similar to the DLL/PLL+KF scheme in mild-condition scenarios. That makes this technique a good candidate for implementation in a real-time software-based receiver.
Finally, it is necessary to remark that ARTEMISA is still a work in progress. An extensive simulation campaign in a realistic urban environment under different conditions using the DLR multipath model is ongoing. In addition to the techniques presented in this article, other advanced techniques such as direct position estimation are under evaluation.
Acknowledgments
The ARTEMISA project, funded by the European Space Agency (ESA) is being carried out by DEIMOS Space, with the Centre Tecnològic de Telecomunicacions de Catalunya as subcontractor. The content of the present article reflects solely the authors’ views and by no means represents official ESA policy.
The authors of this article would like to thank Tiago Peres, Joao Silva, and Pedro Silva from DEIMOS Engenharia; José Antonio Pulido from DEIMOS Space; and Roberto Prieto-Cerdeira from ESA’s European Space Research and Technology Centre for their support in the adaptation of the GRANADA GNSS Blockset and the simulation platform to the requirements of the techniques and multipath environments tested in the project.
ANTONIO FERNANDEZ co-founded DEIMOS Space with headquarters in Madrid, in 2001, where he is currently in charge of the GNSS Business Unit.
MARIANO WIS is currently working for DEIMOS Space as a project engineer in the GNSS Business Unit. He is also a Ph.D. candidate in the Aerospace Science and Technology Program of Universitat Politècnica de Catalunya in Barcelona.
PAU CLOSAS is a senior research associate and head of the Statistical Interference Department in the Communications Systems Division of the Centre Tecnològic de Telecomunicacions de Catalunya (CTTC) in Barcelona.
CARLES FERNANDEZ–PRADES is serving as head of the Communications Systems Division at CTTC, where he holds a position as senior researcher.
JOSE A. GARCIA is with the Radio Navigation Systems and Techniques Section at the European Space Agency’s European Space Research and Technology Centre (ESA/ESTEC) in Noordwijk, The Netherlands.
FRANCESCA ZANIER is also with the ESA/ESTEC Radio Navigation Systems and Techniques Section.
MASSIMO CRISCI is the head of the ESA/ESTEC Radio Navigation Systems and Techniques Section.
FURTHER READING
• ARTEMISA
“ARTEMISA: New GNSS Receiver Processing Techniques for Positioning and Multipath Mitigation” by A.J. Fernandez, J.A. Pulido, M. Wis, F. Zanier, R. Prieto-Cerdeira, M. Crisci, P. Closas, and C. Fernández-Prades in Proceedings of Navitec 2012, the 6th ESA Workshop on Satellite Navigation Technologies, and the European Workshop on GNSS Signals and Signal Processing, Noordwijk, The Netherlands, December 5–7, 2012, doi: 10.1109/NAVITEC.2012.6423092.
• GRANADA GNSS Blockset
“Factored Correlator Model: A Solution for Fast, Flexible, and Realistic GNSS Receiver Simulations” by J.S. Silva, P.F. Silva, A. Fernández, J. Diez, and J.F.M. Lorga in Proceedings of ION GNSS 2007, the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation, Fort Worth, Texas, September 25–28 2007, pp. 2676-2686.
• Signal Propagation Statistical Models
“A Location and Movement Dependent GNSS Multipath Error Model for Pedestrian Applications” by A. Steingass, A. Lehner, and F. Schubert in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 2284-2296.
“Statistical Modeling of the LMS Channel” by F.P. Fontan, M. Vazquez-Castro, C.E. Cabado, J.P. Garcia, and E. Kubista in IEEE Transactions on Vehicular Technology, Vol. 50, No. 6, November 2001, pp. 1549–1567, doi: 10.1109/25.966585.
• Multipath Estimating Delay Lock Loop
“The Multipath Estimating Delay Lock Loop: Approaching Theoretical Accuracy Limits” by R.D.J. Van Nee, J. Siereveld, P. C. Fenton, and B. R. Townsend in Proceedings of PLANS 1994, the Institute of Electrical and Electronics Engineers Position, Location and Navigation Symposium, Las Vegas, Nevada, April 11–15, 1994, pp. 246–251, doi: 10.1109/PLANS.1994.303320.
• Multipath Estimating Particle Filter
“Nonlinear Bayesian Tracking Loops for Multipath Mitigation” by P. Closas, C. Fernández-Prades, J. Diez, and D. de Castro in International Journal of Navigation and Observation, Vol. 2012, Article ID 359128, 15 pages, 2012, doi:10.1155/2012/359128.
• Vector Tracking Loops
Modeling and Performance Analysis of GPS Vector Tracking Algorithms by M. Lashley, Ph.D. dissertation, Auburn University, Auburn, Alabama, December 2009.
“A VDLL Approach to GNSS Cell Positioning for Indoor Scenarios” by F.D. Nunes, F.M.G. Sousa, and N. Blanco-Delgado in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 1690–1699.
• Direct Position Estimation
“Maximum Likelihood Estimation of Position in GNSS” by P. Closas, C. Fernández-Prades, and J.A. Fernández-Rubio in IEEE Signal Processing Letters, Vol. 14, No. 15, May 2007, pp. 359-362, doi: 10.1109/LSP.2006.888360.
• Some Previous Innovation Columns on Multipath Mitigation
“Under Cover: Synthetic-Aperture GNSS Signal Processing” by T. Pany, N. Falk, B. Riedl, C. Stöber, J.O. Winkel, and F.-J. Schimpl in GPS World, Vol. 24, No. 9, September 2013, pp. 42–50.
“Multipath Minimization Method: Mitigation Through Adaptive Filtering for Machine Automation Applications” by L. Serrano, D. Kim, and R.B. Langley in GPS World, Vol. 22, No. 7, July 2011, pp. 42–48.
“Multipath Mitigation: How Good Can it Get With the New Signals?” by L.R. Weill, in GPS World, Vol. 14, No. 6, June 2003, pp. 106–113.
“GPS Signal Multipath: A Software Simulator” by S.H. Byun, G.A. Hajj, and L.W. Young in GPS World, Vol. 13, No. 7, July 2002, pp. 40–49.
“Conquering Multipath: The GPS Accuracy Battle” by L.R. Weill in GPS World, Vol. 8, No. 4, April 1997, pp. 59–66.