Radio altimeters are critical in aircraft landing systems. (Getty image). (Photo: guvendemir/E+/Getty Images)
As most GNSS industry insiders already know, the Federal Communications Commission (FCC) has licensed adjacent GNSS L1 protection frequencies to Ligado Networks (formerly Lightsquared) for its nationwide 4G-LTE network.
Many objections emerged as expected this second time around from government agencies, industries and U.S. forces — yet the roll-out is still underway, pending actual interference occurring. This all in an attempt to find communications bandwidth for many emerging commercial radio applications.
Now, as 5G C-Band 3.7–3.98 GHz wireless phone networks begin their FCC approved roll-out, the Federal Aviation Administration (FAA) has apparently lodged an unanticipated objection on the grounds that cross-interference could compromise aircraft radar altimeter and wireless communications that operate at 4.2 to 4.4 GHz in the C-band.
While 5G wireless has already been operating in many parts of the world without reports of interference with aircraft systems, the FAA appears to be taking a more conservative approach to how aviation in the United States should co-exist with the new 5G phone wireless system. The FAA has proposed imposing an exclusion zone around airports for 5G wireless networks — which apparently have already been operating with reduced power in these areas — until cooperative operation has been proven.
Now along comes a new C-band wireless network (SkyLink) aimed at providing high-integrity unmanned aircraft systems (UAS) command and control (C2). The SkyLink company uAvionix has also developed a C-band Control & Non-Payload Communications (CNPC) radio for UAS applications.
Together with Thales, uAvionics recently tested its radio with its SkyLink radio network. The network has been qualified in accordance with the RTCA DO-377 standard for a network management system that monitors network and radio link health, and the radio has been developed to the draft FAA Technical Standard Order (TSO) C-213A to support critical UAS operations.
The network uses new DO-362A-compliant SkyLink C-band radios, integrates certifiable aviation-grade hardware and software, uses frequency agility, and provides critical fault monitoring and control capability. The objective is to obviate the loss of the C2 link with the vehicle, and thereby enable beyond-visual-line-of-sight (BVLOS) operations without an FAA waiver.
It’s unclear whether the emergence of the C-band network — approved by both the FAA and FCC — will play a role in the current phone network interoperability issue. However, uAvionix reports that several sites in the United States and offshore are either rolling out C-band SkyLink networks or evaluating doing so.
North Dakota already has an ISM-band SkyLink network at its UAS test site that will shortly transition to C-band.
The Choctaw Nation in Oklahoma under an FAA program seeks to enable BVLOS operations through a C-band C2 network.
New Mexico State University will use a Skylink C2 network around Las Cruces airport for small UAS (sUAS) operations and testing to overcome anticipated interference from nearby Air Force and Space Force operations.
The Tillamook UAS test range in Oregon has already installed the first ground site of a SkyLink network.
The University of Alaska at the Fairbanks UAS test site will use uAvionics radios for testing large, heavy UAS operations.
In Canada near the Jonesburg airport, a Skylink C2 network will support the safety case for BVLOS pipeline inspection operations for the oil industry.
While many of these new networks are not yet fully online, the use of frequency hopping, safety-monitored C-band, and certifiable transmissions for UAS command and control appears to be moving forward rapidly. Because the FAA is supporting this testing phase, it seems inevitable that large-scale C-band network rollout for UAS C2 will happen eventually.
5G phone networks, wireless UAS command and control, and aircraft safety systems essential for landing will need to find a way to co-exist and provide reliable, sustained service to their respective customer bases. Look for much more to develop in this ongoing tussle between industry groups and agencies who appear to have little in common, other than grudgingly sharing a crowded radio spectrum.
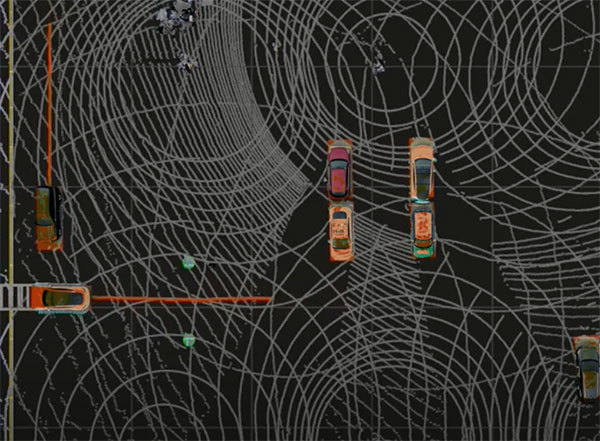
Seoul Robotics has introduced the Level 5 Control Tower (LV5 CTRL TWR), a mesh network of sensors and computers on infrastructure that guides vehicles autonomously without requiring that sensors be placed on individual vehicles.
The technology is in the early stage of commercial deployment to automate last-mile fleet logistics at BMW’s manufacturing facility in Munich. The system has the potential to transform operations for a wide range of business applications, from vehicle distribution centers to car rental companies and trucking logistics.
Seoul Robotics is a 3D perception solution company using deep learning artificial intelligence (AI) to power the future of mobility,
By placing sensors equipped with 3D perception software around vehicles — traffic lights, buildings and highway overhangs — the system can fully capture the environment and communicate with other sensors and the 4/5G systems that come standard on vehicles.
The LV5 CTRL TWR collects all the 3D data, and then automates vehicles accordingly using V2X communications.
“Level 5 mobility has been proven to be more challenging to achieve than expected, until now,” said HanBin Lee, CEO of Seoul Robotics. “LV5 CTRL TWR has massive potential to fuel autonomous mobility, and we are thrilled to continue expanding upon the implementation of this technology with BMW and other partners.”
“Ultimately, these systems will be deployed in additional public and commercial settings, powering aspects of our everyday lives, such as autonomously navigated parking and public transit,” Lee said. “With LV5 CTRL TWR, this future is closer and more accessible than ever.”
The collaboration with BMW leverages hundreds of connected lidar and 3D sensors on infrastructure to automate newly manufactured vehicles within factories and vehicle distribution centers without any human involvement. By making this process autonomous, automakers like BMW can increase operational efficiencies and safety within automotive logistics.
Aceinna Inc. has announced the INS401 INS and GNSS/RTK, a turnkey solution for autonomous vehicle precise positioning. Aceinna made the announcement at the Consumer Electronics Show (CES) taking place this week in Las Vegas.
The INS401 is part of Aceinna’s new product portfolio that provides high accuracy and high integrity localization for developers and manufacturers of advanced driver-assistance systems (ADAS) and autonomy solutions for vehicles of all types.
The INS401 is a high-performance inertial navigation system (INS) with a dual-frequency GNSS receiver enabled with real-time kinematic (RTK). It also features triple-redundant inertial sensors and a positioning engine. It is designed for use in Level 2 and higher ADAS and other high-volume applications requiring precise position information.
The INS401 provides centimeter-level accuracy, enhanced reliability and superior performance during GNSS outages. The dead-reckoning solution delivers strong performance in GNSS-challenged urban environments.
The INS401 is specifically developed for automotive applications using automotive-qualified components and is certified to ASIL-B level according to ISO26262.
INS401 is small, compact and turnkey with a rugged aluminum housing. It includes everything needed for design and development of a robust navigation system with a flexible platform enabling easy customization for fast time to market. The included integrity engine guarantees zero performance failure.
“Based on a decade-long history in ADAS and safety applications, Aceinna is ready for today’s and future autonomous mobility applications,” said Wade Appelman, president and COO of Aceinna. “The INS401 is our next step forward, delivering complex INS/RTK technology to mass markets with turnkey products.”
TerraStar X corrections technology enables lane-level accuracy with under one-minute convergence for consumer and automotive-grade GNSS receivers
Hexagon’s Autonomy & Positioning division has partnered with Chinese positioning company Dayou to bring TerraStar X technology to the Chinese market. TerraStar X provides fast precise point positioning (PPP) corrections for autonomous vehicles and has mass-market use such as in smartphones.
The partnership enables Hexagon and Dayou to provide consistent positioning solutions globally, including North America, Europe and China, so original equipment manufacturers (OEMs) can deploy the same design worldwide.
The GNSS corrections generated from TerraStar X technology enable lane-level accuracy with convergence in under a minute for consumer and automotive-grade GNSS receivers, supporting advanced driver-assistance systems (ADAS), autonomous applications, safety-critical applications, mobile-phone applications and more.
TerraStar X technology delivers corrections using industry-standard formats compatible with mobile networks and enabling efficient delivery of corrections to millions of end-user devices. Through the partnership with Dayou, OEMs can now deploy the same high-accuracy solution across China as in North America and Europe, while having access to local sales, support and technical resources.
“This partnership provides a way for global companies to leverage TerraStar X technology to bring consistent lane-level positioning around the globe,” said Sara Masterson, director of positioning services at Hexagon’s Autonomy & Positioning division. “With its hardware-agnostic design, industry-standard format and delivery of corrections, this technology opens up the possibility of precise positioning for a multitude of new mass-market applications for customers to use one software positioning solution on all platforms worldwide.”
“Dayou is excited to be working with Hexagon in China to bring this next level of positioning technology to market,” said Han Jianxin, chief executive officer at Dayou. “High accuracy positioning used to be limited to expensive equipment and niche markets like survey and mapping. With TerraStar X technology, everyone can have the benefit of more accurate positioning, opening up new applications ranging from autonomous driving and freight to regular smartphone users moving from point A to B.”
Test Regions Expand to China
Using Dayou’s local infrastructure to calculate ionosphere corrections, TerraStar X technology ensures that fast convergence to lane-level and sub-meter accuracy is available when needed.
Engineering development test areas are available around the world to support large-scale programs with functional safety requirements. With these test regions now expanded to China, the partnership with Dayou marks a significant milestone to bring Hexagon’s TerraStar X technology to a global scale.
China Dayou PI is a Chinese company invested in by China Intelligent and Connected Vehicles (Beijing) Research Institute Co. Ltd. for high-precision positioning service and solutions based on GNSS, INS and HD map technology.
Helix builds precision GNSS antennas that enable product designers to create small, accurate positioning, navigation and timing (PNT) synchronization products that defend against vulnerabilities and threats. Helix is also developing its antennas to provide navigation for autonomous vehicles.
Helix’s patented DielectriX antennas are targeted initially to receive PNT signals from GNSS (GPS, Galileo, GLONASS, Beidou) constellations, and the Satelles STL (Satellite Time and Location) signals delivered over the Iridium constellation as well as Iridium’s voice and data network.
Future antenna variants will support low-Earth orbit (LEO) PNT services being planned and built by private companies, as well as government agencies, the company said.
DielectriX antennas discriminate true satellite signals from multipath signals, interference and jamming, delivering high performance in a compact and rugged form factor. Helix’s customers include defense, automotive, aerospace and critical infrastructure companies.
Helix previously raised £2.5 million from UKI2S and angel investors, and has participated in Wayra UK’s Intelligent Mobility Accelerator programme and Seraphim Capital’s Space Camp Mission 6. Helix also received additional grant funding for advanced antenna development from the European Space Agency, and for anti-jamming/spoofing technology from UKI2S.
For navigation and control of any robotic or autonomous outdoor system, GNSS and inertial navigation systems (INS) are key components. Inevitably, the question arises: Should you build your own custom solution or integrate an available GNSS/INS combined solution? What would give you the best performance, while keeping the total cost of ownership (TCO) to a minimum? The TCO is also known as the “long-term price” and is defined as the purchase price plus the costs of operation over time.
Xenomatix is a company offering automotive solutions based on lidar technology. With eight years of innovative experience, Xenomatix has installed a pre-integrated GNSS/INS receiver on its latest lidar product, achieving high GNSS/INS performance with minimal TCO.
In an integrated INS/GNSS receiver, the GNSS receiver provides positioning with centimeter-level accuracy. The other component is a micro-electromechanical inertial measurement unit (MEMS IMU), which measures 3D orientation in terms of heading, pitch and roll angles with sub-degree precision. For its latest product XenoTrack, Xenomatix chose an INS called XenoAsterx based on the AsteRx SBi3 from Septentrio, which it integrated alongside its lidar to collect road-quality data to the smallest detail.
From an in-house solution to a pre-integrated system
Three years ago, when Xenomatix started developing its new lidar road-inspection system, the company had a GPS receiver, an IMU and an odometer as accompanying sensors. The company wanted to expand into new markets of road inspection in accordance with international standards, and so it needed to improve its components to take the overall performance of its system to the next level with RTK high-accuracy positioning.
To achieve this, while saving time and costs, Xenomatix acquired an AsteRx SBi3 INS/GNSS receiver, which allowed it to focus on its core lidar technology and sensor-fusion algorithms.
This off-the-shelf INS/GNSS solution provided all the high-accuracy positioning and orientation information Xenomatix needed, while eliminating most costs of development, maintenance and support. The new receiver allowed them to drive for miles, without any offset in positioning, something impossible with the previous GPS receiver.
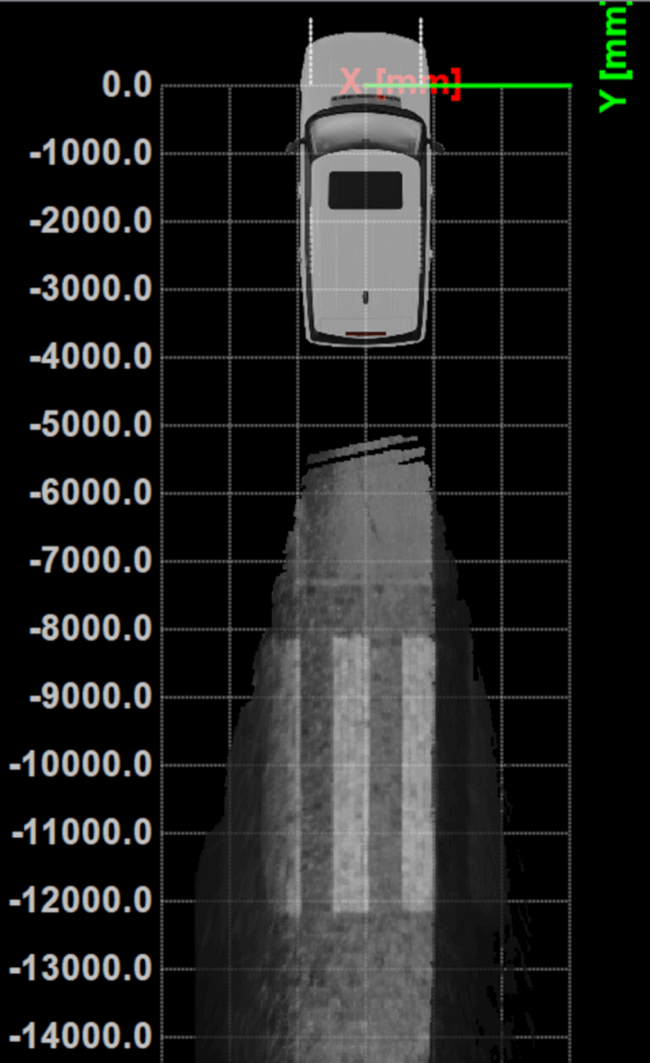
The unique technology from Xenomatix stitches images by using lidar point-cloud overlays. However, when the car is moving fast, this overlay is smaller. The pre-calibrated GNSS/INS extends system performance by allowing stitching even when driving at higher speeds.
“If we start driving and we stitch the road for tens of kilometers and we come back to the same starting point, then we see an offset of only a few millimeters,” said Filip Geuens, CEO, Xenomatix. “This is for us the strongest proof of accuracy and reliability of the GNSS sensor.“
Why pre-integrated GNSS/INS offers better value
The pre-integrated GNSS/INS allows XenoTrack to collect road data even at higher speeds. (Credit: Septentrio)
A pre-integrated GNSS/INS solution — versatile enough to fit into virtually any autonomous or mapping system — offers the best value in the long run for the following reasons.
Better performance. The manufacturer of a GNSS/INS solution specializes in fusing the GNSS receiver and the INS in an optimal way. To accomplish this, the sensors are synchronized and their output run through a sophisticated Kalman filter algorithm. The fused device is then fine-tuned for optimal operation under various conditions. Finally, it is extensively tested and validated.
While being used by numerous customers and in varying applications, the GNSS/INS solution proves itself on various levels such as accuracy and robustness. This results in superior performance, even in the most demanding environments.
After installing the AsteRx SBi3 GNSS/INS system, XenoTrack was able to extend its functionality to inspect longer distances of roads at higher speeds. The AsteRx SBi3 operates reliably, even in challenging environments, such as when driving near high cliffs or under bridges.
Less development time and lower costs. When building a system, the development time is usually about one year employing two full-time GNSS/INS specialists. Hardware components need to be integrated and synchronized, while various interfaces and the Kalman filter need to be implemented. Additional features may be developed, such as velocity input as well as tools for validation, before the intricate step of performance fine-tuning. Finally, additional testing efforts are needed for verification and validation of the device.
On the other hand, a pre-integrated GNSS/INS system with easily accessible interfaces and flexible configuration ensures quick installation, meaning the product is ready within weeks.
Lower maintenance costs and support. Certain high quality pre-integrated GNSS/INS receivers are future-proof — ready to use new GNSS satellite signals and services as soon as they become available. An example of such upcoming service is the Galileo OSNMA anti-spoofing authentication.
Some receiver manufacturers such as Septentrio also offer continuous product improvement in the form of free firmware updates. A system developed in-house, on the other hand, needs continuous investment to maintain its competitive edge.
When issues occur, Septentrio also offers local worldwide support, with experienced application engineers ready to solve GNSS, INS or coupling issues that could halt the production process. For example, when Xenomatix discovered that its GNSS/INS was not working optimally in a certain environment, the company called Septentrio. Within days application engineering experts who analyzed the logged data found the source of the issue and proposed a solution.
Focus on core technology. When the budget is limited, choices need to be made about where to focus the efforts. When a company saves on GNSS/INS development, more can be invested in core technology. This means avoiding any lost-opportunity costs and optimizing margins.
Building your own is not always the best option
Acquiring a pre-integrated GNSS/INS receiver allowed Xenomatix to have a superior and affordable product with a competitive edge. AsteRx SBi3 increased the performance of the XenoTrack mapping system, while a short integration period allowed a faster time-to-market.
Xenomatix also benefited from low maintenance costs, keeping overall TCO to a minimum. Since the company was not spending time developing a custom GNSS/INS system, it could focus fully on its core technology. This allowed Xenomatix to take its business to the next level at a high pace.
Award-winning technology
In November 2021, the XenoTrack road scanner, with AsteRx SBi3 inside, was announced a winner of the IRF Global Road Achievement Award for its innovative road scanning and surveying solutions.
U‑blox has announced the NEO-M9V module, its first GNSS positioning receiver to offer both untethered dead reckoning (UDR) and automotive dead reckoning (ADR).
The NEO-M9V is suitable for fleet management and micro-mobility applications that require reliable meter-level positioning accuracy even in challenging GNSS signal environments such as urban canyons.
Using inertial sensor measurements, UDR offers a smooth navigation experience in dense urban environments by bridging gaps in GNSS signal coverage and mitigating the impact of multipath effects caused by GNSS signals that bounce off buildings. ADR further increases positioning accuracy in demanding environments by including the vehicle speed in the sensor-fusion algorithm.
Offering both UDR and ADR on the same module delivers maximum positioning performance and design flexibility, u-blox said. The NEO-M9V also features dynamic models optimized for both cars and e-scooters.
NEO-M9V is based on the u‑blox M9 GNSS technology platform. Its ability to track up to four GNSS constellations maximizes the number of GNSS satellites within its line of sight at any given moment. Integrated SAW and low-noise amplifier filters offer excellent interference mitigation for a robust solution. Compatibility with the NEO form factor reduces migration efforts for customers upgrading existing designs.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
GNSS technology aids in tracking cargo across the globe, but it can’t defeat a shortage of goods, and of trucks, railcars and ships to move them from ports to their destinations. Nevertheless, some touted solutions are seeking to help. One company, CallPass, is offering a 3D imaging system that claims to eliminate noise from images, providing more accurate cargo measurement accuracy. 3D imaging enables shipping companies to better optimize the space inside trailers and containers. Along with a high-precision GPS/GLONASS receiver, the Lana Vision also uses an ultrasonic-based cargo sensor.
Photo: Gregory_DUBUS/E+/Getty Images
Scouting Radioactivity
Azur Drones and AVNIR Energy have developed a drone package for detecting radioactivity, designed for environmental monitoring of nuclear sites both in France and abroad. The “drone-in-a-box” product integrates a radioactivity sensor into Azur’s Skeyetech drone, the first drone system approved in Europe for beyond-visual-line-of-sight (BVLOS) flights without a remote pilot. AVNIR’s Ionized Zone Inspection Device scintillation detector measures radioisotopes at operational nuclear sites, both routinely and during alerts.
Photo: U.S. Geological Survey
Stay Safe, Mama Bear
Two yearling cubs of world-famous Grizzly 399 have been fitted with GPS-enabled tracking collars near Jackson Hole, Wyoming. Grizzly 399 and her four cubs — an extraordinarily large litter — have been frequenting developed areas for food, but with the collars tracking their movements, the U.S. Fish and Wildlife Service is better positioned to keep the unique family alive and out of trouble until they hibernate for the winter. At age 25, Grizzly 399 is the oldest known female with offspring in the Greater Yellowstone Ecosystem.
Photo: DeepRoute.ai
Nighttime Special Deliveries
DeepRoute.ai has begun operating self-driving, medium-duty trucks in Shenzhen, China. The trucks drive only at night, when there is far less competing traffic. The company expects official operation to launch in 2022 after driverless regulations loosen. The company is also testing Robotaxi service in Shenzhen, to train and validate its algorithm. The current fleet of five trucks could grow to dozens as the company partners with a logistics company to deliver goods.
From its very first issues, 31 years ago, this magazine has covered the role of GPS, now GNSS, in guiding ships, trains and automobiles. What were then some of the most aspirational visions of future applications are now routine. For all forms of transportation, navigation is a safety-critical issue. This is particularly true in the case of cars on public roads, which is also where the technical challenges are the greatest. Ships mostly travel in deep waters, far away from other traffic and fixed obstructions, and nearly always enjoy an unobstructed line-of-sight to GNSS satellites. So do trains, which have the additional advantages of being kept, literally, on track and of operating in controlled environments, with hardly any concerns for unexpected intrusions on their path. Cars, trucks, and busses, on the other hand, must contend with many other vehicles, including those with distracted, drowsy, drunk, or drugged drivers, as well as cyclists, pedestrians, accidents, construction and a bedeviling myriad of sudden and often unpredictable circumstances. Additionally, their view of the sky is often limited by overpasses, tunnels and tall buildings, which challenge GNSS-based navigation with signal occultation and multipath, and their view of their surroundings is often blurred by weather conditions.
Currently, prototype autonomous vehicles carry cameras, lidar scanners, radars and ultrasonic sensors to provide positioning relative to mapped features, as well as for collision avoidance. However, some use cases require absolute positioning sensors, consisting of GNSS receivers coupled with inertial sensors. For example, autonomy levels 3 and 4 require dynamic error bounds of no more than a few meters most of the time under challenging highway conditions and levels 4 and 5 will require this level of accuracy even in deep urban canyons.
This month’s cover story highlights progress in several transportation-related GNSS/PNT applications
Researchers presented hundreds of papers at the 2021 Institute of Navigation (ION) GNSS+ conference, which took place virtually and in person Sept. 20–24 in St. Louis, Missouri. The following five presentations focused on the challenges of urban navigation. The papers are available at www.ion.org/publications/browse.cfm.
Integrating Autonomous Air Vehicles
The emergence and development of advanced technologies and vehicle types has created a growing demand for the introduction of new forms of flight operations. These new and increasingly complex operational paradigms, such as Advanced and Urban Air Mobility (AAM/UAM) present regulatory authorities and the aviation community with several design and implementation challenges — particularly for highly autonomous vehicles.
An overarching and daunting task is finding methods to integrate these emerging operations without compromising safety or disrupting traditional airspace operations. Predictive risk mitigation is critical to meeting this challenge. The authors of this study focus on the development and testing of a prognostic service aimed at estimating the quality of GNSS performance for an autonomous aircraft in complex environments. Flight operations would be able to factor into pre-flight and in-flight route planning an estimate of GNSS quality, thereby predicting poor or unacceptable navigation system performance. The authors provide methodologies for producing quality estimates, and provide results for selected simulation and flight-test cases.
Citation. Dill, Evan, Gutierrez, Julian, Young, Steven, Moore, Andrew, Scholz, Arthur, Bates, Emily, Schmitt, Ken, Doughty, Jonathan, “A Predictive GNSS Performance Monitor for Autonomous Air Vehicles in Urban Environments,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 125–137. https://doi.org/10.33012/2021.18138
Processing Scheme for Integrity Monitoring
Integrity monitoring is of great importance for GNSS applications. Unlike classical approaches based on probabilistic assumptions, the alternative interval-based integrity approach depends on deterministic interval bounds as inputs. Different from a quadratic variance propagation, the interval approach has intrinsically a linear uncertainty propagation adequate to describe remaining systematic uncertainty.
To properly characterize all ranging error sources and determine the improved observation interval bounds, the authors propose a processing scheme. The team validated how the sensitivity analysis is a feasible way to determine uncertainty intervals for residual ionospheric errors and residual tropospheric errors, taking advantage of long-term statistics against reference data. Transforming the navigation problem into a convex optimization problem, the interval bounds are propagated from the range domain to the position domain. The authors implemented this strategy for multi-GNSS positioning in an experiment with static data from International GNSS Service (IGS) station Potsdam (POTS) and an experiment with kinematic data from a measurement campaign conducted in the urban area of Hannover, Germany, on Aug. 26, 2020.
Citation. Su, Jingyao, Schön, Steffen, “Improved Observation Interval Bounding for Multi-GNSS Integrity Monitoring in Urban Navigation,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 4141–4156. https://doi.org/10.33012/2021.18078
Removing Multipath Errors
In the urban environment, multipath and non-line-of-sight cause measurement errors and signal power loss. In urban canyons, while multi-GNSS provides the required number of satellites to obtain a position, the signals may be affected by gross multipath errors, leading to a potentially unsafe position. In this paper, the authors use machine-learning techniques to model multipath error distributions. The features assessed are commonly used parameters such as elevation, S/N and user speed.
The authors drove a sensor-equipped vehicle in Toulouse, France, collecting hours of experimental data for evaluation of their model’s validity. The multipath error component was extracted from data processed from a single-frequency GNSS receiver using measurement differential, clock bias estimation and other techniques. The quantile of multipath error was then modeled using a neural-network-based regression technique. Results using the proposed method are validated by an integrity assessment of the experimental data.
Citation. No, Heekwon, Milner, Carl, “Machine Learning Based Overbound Modeling of Multipath Error for Safety Critical Urban Environment,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 180–194. https://doi.org/10.33012/2021.17874
GNSS/INS/Radar Sensor Fusion
Autonomous driving has gathered much interest in recent years with significant research directed at solving the localization problem. To enable a fully autonomous platform, the navigation system must provide accurate solutions at high rates, be reliable, and be available in all types of environments. These requirements necessitate the use of multiple sensors while remaining cost-effective to enable widespread adoption.
To maintain accurate positioning in GNSS-challenged areas, perception sensors such as cameras, lidar or radar provide another source of absolute positioning information. This paper presents a multi-radar integrated version of AUTO, a real-time integrated navigation system that provides an accurate, reliable, high rate and continuous (always available) navigation solution for autonomous platforms by integrating INS, GNSS-RTK, odometer and multiple radars sensors with high-definition maps. AUTO uses a tight nonlinear integration scheme to fuse information from multiple imaging radars with the INS/GNSS/odometer solution. The HD maps may come from a map provider or be crowdsourced from radar data.
The results in this paper compare multi-radar configurations of one to five imaging radars for a vehicle and demonstrate the accurate solution achieved through the tightly integrated system. Key performance indices are presented for a multi-radar configuration of AUTO for vehicle and robot. The results show how radar data contributes significantly with other sensors to provide a high-rate, accurate, reliable and robust navigation solution in GNSS-degraded environments and adverse weather conditions.
Citation. Krupity, Dylan, Ali, Abdelrahman, Chan, Billy, Omr, Medhat, Salib, Abanob, Al-Hamad, Amr, Wang, Qingli, Georgy, Jacques, Goodall, Christopher, “AUTO: Multiple Imaging Radars Integration with INS/GNSS for Reliable and Accurate Positioning for Autonomous Vehicles and Robots,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 77–92. https://doi.org/10.33012/2021.17903
Feature Matching for Visual Nav
Typical feature matching on aerial imagery results in a majority of features being placed on trees and other seasonally variable features. The researchers tested the effectiveness of using semantic segmentation to create and force robust features onto desired areas of an image for the purpose of visual navigation. The process involves testing several segmentation algorithms to achieve state-of-the-art segmentation results and evaluating the effectiveness of feature matching on segmented imagery. The aim is to develop a near state-of-the-art semantic segmentation model for aerial imagery that can extract desired buildings from an image.
The research will then focus on feature-selection and feature-matching algorithms to compare the segmented aerial key features with a database of features from satellite imagery. So far, results show that feature selection algorithms such as SIFT fail to overcome the nuances among multisource aerial imagery. Improving the feature selection algorithm ideally will allow for an increased quantity and quality of matches, ultimately resulting in a camera pose estimation sufficient to be a reliable alternative to GPS.
Citation. Hussey, Tyler, Leishman, Robert C., Woodburn, David, “Towards More Robust Vision-based Map Matching Through Machine Learning & Improved Feature Matching,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 1647–1653. https://doi.org/10.33012/2021.17911
Autonomous vehicles require lane-level accuracy at all times and in all conditions. However, under many conditions, such as in urban canyons and tunnels, they may lose line-of-sight to enough GNSS satellites to achieve accurate and robust positioning or may have no signal at all. In these situations, they need data from other sensors, including an odometer and an inertial measurement unit (IMU). Creating reliable and safe autonomous navigation requires fusing GNSS and inertial technology in a multi-layered system.
SBG Systems and its partners LeoDrive.ai and Intempora, have been doing this to develop solutions for autonomous vehicles. SBG’s technology enables multi-sensor integration while addressing such autonomous navigation challenges as time synchronization, integrity, precise positioning and high-definition mapping.
“To ensure performance and build trust, we assemble our own IMUs from carefully selected industrial-grade parts, then we calibrate all our products individually,” said Laurent Le Thuant, business manager for SBG, in a recent webinar.
For safe operation, Le Thuant explained, the vehicle’s true positional error (PE) must be smaller than its protection level (PL), which in turn must be smaller than its alert limit (AL): PE < PL < AL. Otherwise, the solution is declared unavailable or reports misleading information.
In automotive tests conducted in a business district near Paris, an SBG vehicle was equipped with both a GNSS-only, automotive-grade multiband RTK receiver equipped with a PL determination algorithm and an RTK GNSS receiver tightly-coupled with an IMU and an odometry input. A comparison showed that the former was not suited for self-driving, while the latter significantly improved the solution availability, accuracy and protection levels.
For self-driving in the most severe conditions, even this solution requires integration of supplementary sensors, such as cameras, lidars and radars for precise localization.
Swift Navigation designs, manufactures and integrates GNSS receivers, as well as providing the Skylark wide-area GNSS corrections service. Its markets are automotive, transportation (last mile delivery, commercial trucking, rail), robotics/machine control (construction, mining, precision agriculture, landscaping), UAVs, micromobility and mobile devices and applications.
The company’s technology is compatible and interoperable with most major GNSS receivers for multiple markets. Its Starling positioning engine and Skylark corrections “are scalable to bring precision to legacy low-cost single-frequency receivers, all the way to the most sophisticated state-of-the-art triple-frequency multi-constellation systems,” said Joel Gibson, Swift’s executive vice president of Automotive. “By working with a multitude of receiver vendors for different applications, Swift leverages all constellations and all signals and maximizes the performance required for the application.”
The most accurate and reliable navigation system for every application would take advantage of all available GNSS signals, as well as all available corrections, dead reckoning and fused data from other sensors, such as cameras, lidar and radar. However, of course, that is not possible due to cost, size, weight and power considerations. Swift’s approach to the trade-offs required depends on each use case.
Micromobility
In the area of micromobility (such as scooters), the main constraints for implementing a positioning solution are cost and power, coupled with the challenge of satellite signal outages and multipath in dense urban environments where these vehicles primarily operate, Gibson explained. “Cost-effective dual-frequency GNSS receivers are now showing up in micromobility architectures. Pairing them with our Starling positioning engine, which integrates inertial sensor data and wheel ticks, and augmenting them with Skylark corrections data, makes it possible to meet such compliance requirements as geofencing and limiting sidewalk use.”
Additionally, by achieving decimeter-level positioning, Swift’s micromobility solution makes it easier for both users and service staff to find scooters, which increases the scooter companies’ revenues.
Photo: Swift Navigation
Automotive
In the automotive industry, inertial sensors and wheel odometry are ubiquitous and pair naturally with GNSS to mitigate satellite signal outages, Gibson pointed out. Likewise, cameras and radar — cornerstones of ADAS — are very complementary to GNSS for safety applications, and lidar further complements GNSS in feature-rich environments such as dense urban areas.
Rail
Rail applications, such as Positive Train Control, have traditionally needed an accuracy of one or two meters, coupled with ruggedized hardware. “Swift’s precise positioning solution is deployed across continental rail systems today, and we are now engaging rail OEM and operator programs requiring sub-meter accuracy to ensure track-to-track accuracy and safety requirements in support of the transition to more autonomous rail operations,” said Gibson. “Leading rail companies are also looking for operational efficiencies by transitioning away from the high operational costs of maintaining reference base stations along track routes, instead moving to the more cost effective, reliable and seamless Skylark corrections coverage.”