Findings show accuracy of new sensors is improved by greater than an order of magnitude over current offerings.
Honeywell, with funding from the U.S. Defense Advanced Research Projects Agency (DARPA), is creating the next generation of inertial sensor technology that will one day be used in both commercial and defense navigation applications.
The HG1930 IMU. (Photo: Honeywell)
Findings gathered in Honeywell labs have shown the new sensors to be greater than an order of magnitude more accurate than Honeywell’s HG1930 inertial measurement unit (IMU) product, a tactical-grade product with more than 150,000 units currently in use.
An IMU uses gyroscopes, accelerometers and electronics to give precise rotation and acceleration data to enable a vehicle system to calculate where it is, what direction it is going and at what speed, even when GPS signals aren’t available.
There are various types of IMUs on the market, and some — like the next-generation version currently under development — use sensors based on micro-electromechanical systems (MEMS) technology to precisely measure motion.
“Typically, MEMS inertial sensors have been on the lower end of the performance scale, but this latest milestone shows we are changing that paradigm,” said Jenni Strabley, director of offering management for Inertial Sensors, Honeywell Aerospace. “With this next-generation MEMS technology, we’re increasing performance without having to significantly change the size or weight of the IMU. This is a game-changer for the navigation industry, where customers need highly accurate solutions but cannot afford to compromise on weight or size.”
Over the past few years, Honeywell has been working with DARPA to develop the next generation of high-precision navigation-grade IMU technology, under the Precise Robust Inertial Guidance for Munitions: Thermally Stabilized Inertial Guidance for Munitions program.
The new MEMS sensors will use different sensor designs and electronics to enable higher performance. They will serve a broad range of applications in autonomous land and air vehicles for both military and commercial customers, including future urban air mobility aircraft.
“Now that we have demonstrated that MEMS is capable of reaching these incredibly precise performance levels, it is the perfect time to start talking with potential users about how this technology could help their applications,” Strabley said. “We believe this new technology will have a variety of applications, such as onboard future vehicles that will fly in urban environments where lightweight, extremely precise navigation is critical to safer operations. Additionally, there are other applications that haven’t been invented yet but may be enabled by these types of technology innovations.”
Commercial sales of an IMU containing these next-generation sensors are still several years away, but one of the first products using this new technology is expected to be more than 50 times more accurate while roughly the same size as Honeywell’s IMU.
Honeywell has long been a pioneer in MEMS-based IMUs, including the HG1930. Honeywell’s lineage in navigation dates to the 1920s and since then Honeywell has developed and manufactured high-performance navigation solutions found on many aircraft and other vehicles worldwide.
An ESA-supported project is testing autonomous vehicles on an intelligent road in Lapland, Finland.
Known as Snowbox, this 10-km stretch of forest-lined roadway on Finland’s E8 highway has been specially equipped for autonomous driving tests, ESA said. Containing cameras, “laser radar” lidar, ultra-wideband antennas and reflective panels, the road itself is underpinned by power and fibre optic lines, and embedded with pressure sensors to record road surface conditions and the speed and type of vehicles driving along it.
Known as Snowbox, this 10-km stretch of forest-lined roadway on Finland’s E8 highway has been specially equipped for autonomous driving tests, including FinnRef GNSS reference stations, as seen here. (Photo: ESA)
“If autonomous vehicles can drive well here, they can drive almost anywhere,” said Sarang Thombre of the Finnish Geospatial Research Institute, who’s managing the Arctic-PNT project. “Our project aimed at ensuring in particular that the precise positioning required by autonomous systems was available here, to establish this test site is indeed somewhere that driverless vehicle manufacturers should employ for testing. We carried out experiments with a robotic car over two successive seasons to show that the necessary precise positioning, down to 20 cm, is indeed accessible.”
Snowbox is also linked to the FinnRef network of satellite navigation reference stations, to deliver corrections for precise satnav positioning. By performing positioning measurements continuously at fixed locations, these reference stations serve as a standard, allowing the identification of measurement errors to boost positioning accuracy on a localized basis, ESA added.
Snowbox map. (Photo: ESA)
“The Arctic is a difficult environment for autonomous driving in general,” Thombre said. “Signal disturbance due to the ionosphere, the electrically charged layer of the atmosphere, degrade satellite navigation performance. This effect is more pronounced in the Arctic region. And satnav augmentation systems also face challenges.
“Because their signals are broadcast from geostationary satellites, they are only viewable here at an elevation of up to 10 degrees above the horizon. And mobile coverage — useful for providing correction data from reference networks — is also inconsistent.
“In addition, possibility of mists and fog, snowstorms and rainfall make it difficult for cameras and lidar, while ice and snow on the road means wheel speed sensors may slip. And temperatures that can plunge down to below -30°C can impede the performance of electronics.”
The Arctic-PNT team’s testing was based around a robotic car crammed with sensors and recording equipment. Called Martti, the vehicle was supplied by Finland’s VTT Technical Research Centre.
Snowbox test roadway. (Photo: ESA)
“While Martti is capable of autonomous driving, we drove it manually,” Thombre said. “We were using it to capture all the data we needed. We started off using solely satellite navigation – including Europe’s Galileo and EGNOS – progressively adding more and more augmentation data, including in-car sensors, and corrections from the FinnRef stations, to reach the all-important precise positioning threshold of 20 cm.
“To access the FinnRef corrections from the car systems we tested out various mobile sim cards. Adding to the challenge, we crossed an international border, because part of the E8 highway is instrumented on the Norwegian side as well — called Borealis.”
The Snowbox infrastructure was established along the E8 because, while it is a remote roadway it is also economically important, with trucks heading south from Arctic fisheries.
The Arctic-PNT test campaigns, starting from 2018, gave a positive bill of health to the Snowbox, which is available for experiment campaigns. The campaigns were supported through ESA’s strategic initiatives for the Arctic region.
Feature image: The Arctic-PNT team’s testing was based around a robotic car crammed with sensors and recording equipment. Called Martti, the vehicle was supplied by Finland’s VTT Technical Research Centre. (Photo: ESA)
Trimble has introduced the Trimble AX940 and AX940i high-precision GNSS smart antennas, designed for a broad range of high-precision applications such as precision agriculture, milling machines in construction, forestry harvesting equipment, autonomous vehicles, port automation and mobile mapping.
With multi-frequency, multi-constellation support for GPS, Galileo, GLONASS, BeiDou, QZSS and NavIC, the smart antennas can deliver reliable centimeter-level accuracy in a variety of environments. In addition, the Trimble AX940 and AX940i provide reliable, high-accuracy positioning without the constraints of a local base station or cell modem by using Trimble RTX correction services.
Built-in inertial sensors on the AX940i allow a tight integration with GNSS observations in the RTK/RTX positioning and orientation engine, providing continuous high-rate low-latency output to guidance and control systems.
“The new AX family of smart antennas delivers the latest GNSS and inertial technology in an easy-to-integrate and rugged form factor,” said Thomas Utzmeier, general manager for Trimble OEM GNSS. “Reliable, robust and compact, the smart antennas are an ideal option for OEMs and system integrators to easily and quickly add high-accuracy positioning to their applications.”
The Trimble AX940 and AX940i provide flexible interfaces with high-speed data transfer and configuration; simplified integrations reduce development times; and an intuitive 3D graphical web page allows easy input of the lever arm for easier set up.
The full-featured smart antennas are equipped with 336 channels for multi-constellation support; Trimble RTX and OmniSTAR support; flexible RS232, USB, CAN and Ethernet interfaces; and advanced RF spectrum monitoring. The AX940i also includes Wi-Fi and Bluetooth connectivity for wireless interface and control.
Using the latest Trimble Maxwell 7 Technology, the AX940 and AX940i are designed with flexible signal management that enables the use of all available GNSS constellations and signals.
The Trimble AX940 and AX940i smart antennas are expected to be available in the first quarter of 2021 through Trimble’s OEM GNSS Sales Channel.
For the past decade, widespread deployment of autonomous vehicles (AV) has been just over the horizon — that imaginary line that recedes as you approach it.
It has been delayed mainly by technical issues, which will eventually be followed by legal and regulatory ones, mainly regarding liability, and by a struggle to gain public acceptance. When they finally reach the mass market, however, AVs will reduce traffic fatalities by at least an order of magnitude because they do not get distracted, drunk, drowsy or enraged and are much better able than humans to gauge distances and speeds.
Additionally, they will be able to communicate with each other and with the infrastructure, which will not only further improve safety but also reduce congestion and fuel consumption via the adoption of techniques such as convoying.
Logically, even if AVs only somewhat reduced traffic fatalities (about 38,000 per year in the United States), the public should welcome them with open arms. In reality, though, the reaction to even a single death caused by an AV — like the one in Tempe, Arizona, in March 2018 — can set AV deployment back years.
Therefore, car manufacturers are challenged to develop AVs that can navigate extremely safely in a wide range of traffic, road and weather conditions. For more than a century, human drivers have routinely managed sudden obstructions, poor visibility and dangerous behavior by other drivers that still bedevil their new robotic counterparts, despite the sensors, microprocessors and algorithms at their disposal.
The primary technological obstacle to widespread deployment of AVs on roads is “the complexity of the system and the amount of time that it takes to develop a functionally safe autonomous vehicle,” said Steve Ruff, general manager of Trimble’s On-Road Autonomy Division, which develops positioning solutions for autonomous vehicles that operate on public roadways. He cites the time required to develop “a comprehensive, safe, autonomous vehicle technology stack” and points out that “we are on the verge of going from level two to level three, which requires the driver to stay engaged in the driving experience in case the autonomous system has a problem.”
Multiple sensors
While AV developers are exploring different ways of obtaining reliable sub-centimeter positioning accuracy, all generally rely on collecting data from multiple sensors on the vehicle and applying an algorithm to synthesize the data in real time and generate a continuous, accurate position. Computer vision, radar and lidar play important roles in an AV by perceiving its surroundings and localizing it to an a priori map. This functions well in feature-rich urban environments, but can degrade in sparse highway settings.
Radar has good ranging accuracy, but is unable to detect and recognize traffic signs and road markings. Lidar has even greater ranging accuracy but is challenged in featureless areas, such as straight highways and country roads. Digital cameras are good for detecting objects and navigating in tunnels and urban canyons, but, like lidar, are less effective on featureless roads and in low visibility conditions (rain, fog, darkness, snow, sun glare).
Plus, they are challenged by the absence of road markings or the presence of construction. Inertial navigation systems (INS), while excellent at compensating for brief GNSS outages, can only guide vehicles for short stretches due to their inherent drift. (INS are essential on aircraft and vessels, whose attitude is constantly changing, but that is not relevant for vehicles, which travel essentially flat relative to, and at a constant distance from, the road surface.)
GNSS and Corrections
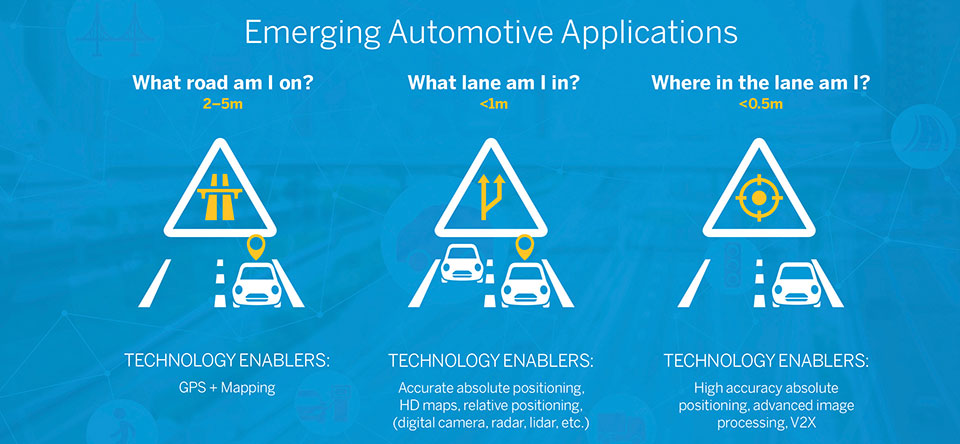
Satellite navigation plays a central role in an AV. At a minimum, it guides it from a trip’s origin to its destination, including stops or waypoints in between, the same way it would advise a human driver. It also continuously alerts the vehicle to upcoming stops, slowdowns, turns, congestion and other challenges that are already mapped—whether long in advance by map makers or moments earlier via crowdsourced updates. Finally, if sufficiently accurate, it can steer the vehicle to keep it in the center of its lane and to make smooth lane changes and turns. Determining on which road a vehicle is requires an accuracy of less than 5 meters; determining in which lane it is requires an accuracy of less than 1 meter; and determining where in the lane it is requires an accuracy of less than 0.5 meters.
Two kinds of GNSS corrections are commonly used for AVs: real-time kinematic (RTK) and precise point positioning (PPP). RTK, which is generally accurate to the centimeter level, relies on ground-based reference stations at fixed, surveyed locations that process and transmit error-corrected signals to receivers within a 10- to 20-kilometer range, typically in real-time via a cellular link. PPP, which is accurate to the tens of centimeters, uses a global network of ground stations to generate an accurate signal, and transmits it to subscribers via the internet or geostationary satellites. However, the receiver in the vehicle needs 20 to 60 minutes to align with the PPP signal before it can rely on it.
Both RTK and PPP are established in industries such as mining, construction and precision agriculture, where vehicles operate in controlled environments with little or no traffic. AVs on public roads present a far greater challenge. A car’s typical range far exceeds that of any RTK base station, and base stations can also have down time, while in-vehicle systems must use multi-frequency receivers to reduce the convergence time of the PPP signal. In case of outage of either the GNSS signal or the correction signal, the vehicle’s system must rely on data from its other sensors and recover swiftly from the error state.
Trimble’s RTX is road ready
The first PPP service in commercial use for passenger vehicles is Trimble’s RTX, which provides real-time, centimeter-level positions via IP/cellular connection or satellite broadcast worldwide. It delivers positioning via satellite to GM’s Super Cruise, a hands-free driver assistance feature for use on limited access freeways.
“We’re GNSS receiver-agnostic,” said Steve Ruff of Trimble’s On-Road Autonomy Division. “We’ll use any receiver that’s preferred by the OEM building the AV.”
Image: Trimble
Trimble, he recalled, became GNSS agnostic with regard to automotive navigation nearly 15 years ago, when it decided to get out of the commercial-grade or consumer-grade GNSS business. “It has worked out quite well, because not only can we meet the quality costs and performance targets of our OEM customers, it also allows us to do what we’re good at. We can take our positioning solution, adapt it to work with any measurement engine, and put together a solution that fits the OEM’s requirements just right.”
Automotive companies, Ruff explained, generally have certain requirements for the GNSS receiver, including certain standards for application-specific integrated circuits (ASIC) and automotive safety integrity level (ASIL), as well as meeting their accuracy requirements. “So, if the receiver has suitable code and carrier phase measurements that can support their accuracy level, then that will be the third requirement for the receiver for the automotive segment.”
For off-road vehicles for agriculture, construction and mining, Trimble only uses its own receivers, said Thomas Utzmeier, general manager of the company’s Off-Road Autonomy Division. Their requirements center on precision, position availability in challenging environments, and integrity of the position. “In the use cases on which we are working,” Utzmeier said, “we certainly see sub-decimeter accuracy. We are targeting probably three, four, sometimes five centimeters.” In more challenging use cases, GNSS plus sensor fusion — including INS and optical data — maximizes position availability and accuracy, he explained.
For the on-road segment, Ruff’s division offers a “positioning stack” that includes corrections, the GNSS position algorithm and inertial fusion. “Then we provide services to help the OEMs take our software and integrate it on the platform of their choice.”
GNSS is a critical single point of failure for navigation in the aviation industry. A new white paper published by Egis says it’s time for the industry to get rid of legacy navigation aids (NavAids) and catch up technologically with the rest of the communications industry.
Current navigation backups are ground-based navigation aids such as distance measuring equipment (DME). These use post-World War II technologies, with very low spectrum efficiency. Some might find it surprising to learn that they are still using Morse code.
While difficult to jam due to their strong signal, current navigation aids are not cyber secure. Due to their spatial distribution, they can be limited in their support to PBN (performance-based navigation) or any new concept of operations.
The horizontal positioning error was measured under 10 m, so the LDACS-NAV would easily meet RNP 0.3 requirements.
Legacy NavAids — NDB (non-directional beacon), ILS (instrument landing system), VOR (VHF omnidirectional range) and DME — all require a specific frequency band, various equipment, and airborne and ground antennas.
As a result, the average commercial airliner can carry around seven specialized navigation antennas, and as many as 20 when accounting for all the other communication, navigation and surveillance (CNS)functions. Having different radio systems is adding redundancy but makes the aircraft and the ground equipment very costly, as well as difficult to engineer and to maintain.
Two major problems could affect the aircraft industry. First, software-defined radio, and powerful low-cost radio systems are available to the public and any ill-intended person could interfere, deactivate or worse, divert these vulnerable systems from their purposes. Second, spectrum is a finite and fixed asset (aviation uses 14% of the total available spectrum).
Why hasn’t this problem been solved already?
There are no market incentives for air navigation service providers (ANSPs) and airlines to make expensive investments in ground infrastructures and aircraft retrofits. With an average lifetime of 25 years per plane, commercial fleets take a long time to be renewed.
Also, the aviation spectrum is protected, which has led to complacency and a lack of pressure to use the latest technologies to improve spectrum efficiency.
Stakeholder Coordination. States, ANSPs, airlines, airports, aircraft manufacturers, communications providers and system providers all have their own interests and perspectives, which increases the difficulty in developing and maintaining a global CNS roadmap.
Deployment. Once a roadmap is agreed on, the deployment challenge remains. For instance, the retrofit compliance date for ADS-B was pushed back from June 2020 to to June 2023 due to the pandemic. The capacity of aviation to evolve depends on when the operational and commercial benefits are clear, such as when GNSS was implemented for navigation.
The Human Factor. Human factors have to be considered for any critical change in aviation. Pilots are trained on navigation aids and GPS, and used to communicating by VHF voice with air traffic control officers. This is the reason why the evolution of navigation and communication systems must be seamless with current systems or require an in-depth human-factor risk assessment.
Potential Solutions
To future-proof aviation and performance-based operating procedures, aircraft need both a broadband, IP-based datalink capable of VoIP and a secure, cost-effective alternative positioning, navigation and timing (A-PNT) system as a back-up to GNSS. Today, GNSS backup is the 70-year-old DME — using the signals from multiple DMEs, aircraft can locate themselves with reasonable accuracy.
The main choices to replace the DME are either an enhancement of DME systems (Multi-DME RAIM, eDME, Mosaic DME) or an A-PNT solution (LDACS-NAV, WAM-TISb, SSR mode N, eLoran).
If we look at the most mature solutions, the DME/eDME and the LDACS-NAV are the main options, and they represent a real dilemma.
DME/DME. This solution represents the best GNSS backup currently available. One possibility is to improve the signal to improve accuracy. Other improvements would allow the detection of more than two ground stations, or even receiver autonomous integrity monitoring (RAIM) capability. Only small improvements need to be made to the signal and to the FMS (Flight Management System), making it the option requiring the least effort and expense.
However, to reach a reliable Required Navigation Performance (RNP) standard of RNP 0.3, additional distance measurements are required, especially at low altitudes, and more DME facilities might be needed. Plus, this solution does not provide a secure, integrated communication and navigation solution and does not improve spectrum efficiency.
LDACS-NAV. The L-band digital aeronautical communication system (LDACS) for continental ground communication is an IP-based data-link solution with a built-in navigation capability. It uses orthogonal frequency-division multiplexing, organized as a cellular network and sharing features with 3G and 4G. It works by detecting signals of opportunity within the communication exchange, and then multi-laterating the signals from at least four ground transmitters to calculate an airborne position. The frequency is ingeniously placed in the L-band between each DME frequency. It is built with interference mitigation algorithms and minimizes out-of-band radiation to protect DME.
This solution is spectrum efficient, cybersecure, doesn’t require additional frequency assignment, and is scalable and adaptable to local needs. Given LDACS is almost certain to be implemented in communications to replace VDLM2, using this capability would be an easy choice for navigation.
Features like air-to-air ranging, surveillance or enhancements to DFMC GBAS are possible. Also, additional navigation information can be transmitted, such as trajectory-based operations and 4D trajectories.
Both Frequentis AG and Leonardo SpA have built fully functional and interoperable prototypes. In March 2019, the German Aerospace Centre (DLR) tested LDACS. The flight campaign showed its capabilities in practical scenarios with industrial demonstration equipment. The horizontal positioning error was measured under 10 m, so the LDACS-NAV would easily meet RNP 0.3 requirements.
ICAO Recognition. An International Civil Aviation Organization (ICAO) standardization group has started work on LDACS for both communication and navigation. The LDACS-NAV will first be used to augment the DME system.
More Study Needed
To fully validate the LDACS-NAV concept, further studies and large-scale demonstrations must be conducted, and a cell-planning study needs to determine the number of necessary ground stations.
Also, a detailed cost/benefit analysis must be undertaken to evaluate the cost of an EU-wide LDACS-NAV network. It would take into account the manufacturing and deployment costs of ground stations as well as equipment costs of multi-mode LDACS/VDL avionics, identifying whether it can support navigation functions.
Also studied should be the benefits of having a GNSS back-up system, equipage costs of a dedicated avionic system and the direct operational benefits of providing a reliable, low latency and cost-efficient communication and navigation network for all aviation stakeholders, including secured proprietary information for airlines and aircraft manufacturers, and including full 4D trajectory-based operations and flight-centric air traffic management for ANSPs.
If both the cell-planning study and the cost/benefit analysis suggest a positive economic advantage to implement the LDACS system compared to the current system or the other potential A-PNT solutions, then European institutions could select LDACS as the official long-term A-PNT solution in the CNS Roadmap & Strategy and enable the SESAR Operational Concept high-level goals. This would help accelerate the standardization and industrialization activities to resolve the current lack of redundancy in our CNS systems.
How is the completion of Galileo and BeiDou affecting the development of autonomous vehicles?
Ismael Colomina, chief scientist, Geonumerics
“GNSS has had a limited impact on the development of AVs because their developers regard it as insufficiently accurate, reliable, and ubiquitous. Only a minority of them are aware of the benefits that the new/modernized constellations bring. More and improved signals and new services— both commercial and public—such as Galileo’s HAS, NMA and CAS will enable and complement visual, lidar and radar sensors for SAE levels of automation 2 and higher and for ASIL D safety levels.” Ismael Colomina GeoNumerics
Ellen Hall, Spirent Federal System
“Safety is critical to the implementation of AVs and this safety relies upon PNT accuracy, availability and robustness. These three requirements all benefit from constellation diversification in terms of multiple signals, frequencies, satellites, and constellation providers. In addition to the four civilian signals available on three frequencies from the GPS constellation, signals from Galileo and BeiDou provide suitably equipped receivers with extra satellites, signals and ground segment diversity.” Ellen Hall Spirent Federal Systems
Brad Parkinson
“The economic potential of self-driving vehicles is the major driver for their development. Can they be made affordable, safe, dependable, and useful? More operational GNSS constellations may help resolve these issues favorably, but GNSS progress should not significantly influence the large number of developers. My favorite such application is long-haul trucking, which may have some very favorable profit and safety benefits.” Bradford W. Parkinson Stanford Center for Position, Navigation and Time
Image: metamorworks/iStock/Getty Images Plus/Getty ImagesChris Hogstrom, Spirent Federal Systems
Inertial navigation systems (INS), like most navigation systems, have evolved through countless iterations and improvements over many years. An INS, unlike other navigation technologies, does not rely on any external signals or inputs to aid navigation. It is, therefore, extremely difficult to spoof, jam or disrupt the system, and solar flares, ground/sky visibility and climate do not affect its ability to aid in navigation — unlike GNSS.
An INS knows where it is going because it knows where it has been. Modern INS use a minimum of three orthogonal accelerometers to measure accelerations in the x, y, z planes and a minimum of three orthogonal gyroscopes to measure the angular accelerations about the x, y, z planes. When the INS is initializing, its current location is fed into the system. After initialization, the INS utilizes the sensor outputs to determine its position relative to its starting point.
The INS made its debut during World War II, where it was used to guide German V2 missiles. At the time, the INS was still rather primitive, using two two-degrees-of-freedom gyroscopes and one integrating accelerometer. It wasn’t until the war’s end that Wernher von Braun and his team developed a stable platform with three single-degree-of-freedom gyroscopes and an integrating accelerometer.
World War II Innovation
Once the war was over, the United States Army acquired many of the lead scientists from the German V2 project and furthered research into INS. The Air Force also had an interest in INS and contracted Northrop Aircraft (now Northrop Grumman) to develop the guidance system aboard the SNARK cruise missile. However, the work under Charles Draper at MIT’s Instrumentation Laboratory spearheaded INS for use in aircraft. Draper was an amateur pilot and quickly saw the benefits that a self-contained system provided over the navigation systems of the day. The developments made by the Instrumentation Laboratory led to the success of the inertial-guided transcontinental flight in 1953.
By the late 1960s, military bombers and aircraft used INS, and by the early 1970s, it was commonplace in commercial aircraft, too. Today, INS technology can be found in aircraft, spacecraft, ships and submarines, as well as smartphones, watches and other wearable tech. It has quickly become an essential enabling technology for autonomous vehicles, and future applications are being studied.
The biggest weakness of INS is that they drift over time. This means that the longer an INS functions, the less accurate it becomes. For this reason, many INS are part of a sensor-fusion system. Incorporating data from many different sensors — such as GPS, a barometer, a compass and INS — a sensor-fusion system combines data through a Kalman filter to determine a more reliable and accurate positioning and navigation solution.
Best of Both Worlds
By combining INS with GPS, you get the benefit of both systems while minimizing their weaknesses. GPS and other GNSS have quickly become the gold standard for accurate positioning, as well as being the only global source of absolute position. Receivers tracking four or more satellites can provide their precise location anywhere on Earth.
However, GPS has significant and well-documented weaknesses. These stem, primarily, from the fact that GPS signals are extremely weak by the time they reach terrestrial users. This means that GPS signals, intentionally or otherwise, are easy to jam, and the broadcast nature of the signals means they are open to a variety of spoofing attacks. Fusion systems using an INS and GPS receiver can rely on GPS when the GPS signal is unobstructed, and switch to the INS solution when GPS is unreliable.
In a world where aircraft are now able to fly themselves and cars are quickly achieving autonomy, our dependence on these sensors is ever-increasing. Autonomous solutions with a navigation sensor suite of multiple sensor types are becoming common. Sensor suites can include other vehicle sensors that aid absolute positioning by sensing parameters such as steering angles, wheel rotations, etc. They are also beginning to incorporate non-GNSS-based RF signals to aid in navigation. Multiple sensors offer increased redundancy, helping achieve the required safety levels and the desired performance boundaries.
High-Mileage Testing
Testing and optimizing these sensor-fusion systems presents a serious challenge, especially in the transportation sector. Testing on a live platform can be hugely expensive and lacks any chance of repeatability. For these reasons, simulation is critical. In addition, representative models must take into account the impact of the environment and the dynamics of the vehicle frame (where sensors are installed) to achieve the requisite realism.
My company, Spirent Federal, has spent the past 20 years building sophisticated and robust test solutions so that sensor-fusion systems can be fully tested and characterized. Thorough testing increases performance and reliability in safety- and mission-critical applications.
Specifically, our GSS7000 and GSS9000 GNSS simulators deliver the precision and fidelity needed for high-performance applications, while our inertial emulation platforms incorporate the key industry models of both inertial measurement units (IMUs) and embedded GPS/inertial (EGIs) for dynamic integrated testing in the lab.
We work closely with major defense contractors, such as Northrop Grumman and Honeywell, to provide robust test solutions as well as alternative RF PNT simulation capabilities.
In addition, hardware-in-the-loop incorporation with ultra-low latency, modeling signal propagation in a 3D environment — and the ability to “shift left” with software-only testing — are what helps to make Spirent Federal the trusted partner in sensor fusion development.
Chris Hogstrom is an engineer with Spirent Federal Systems.
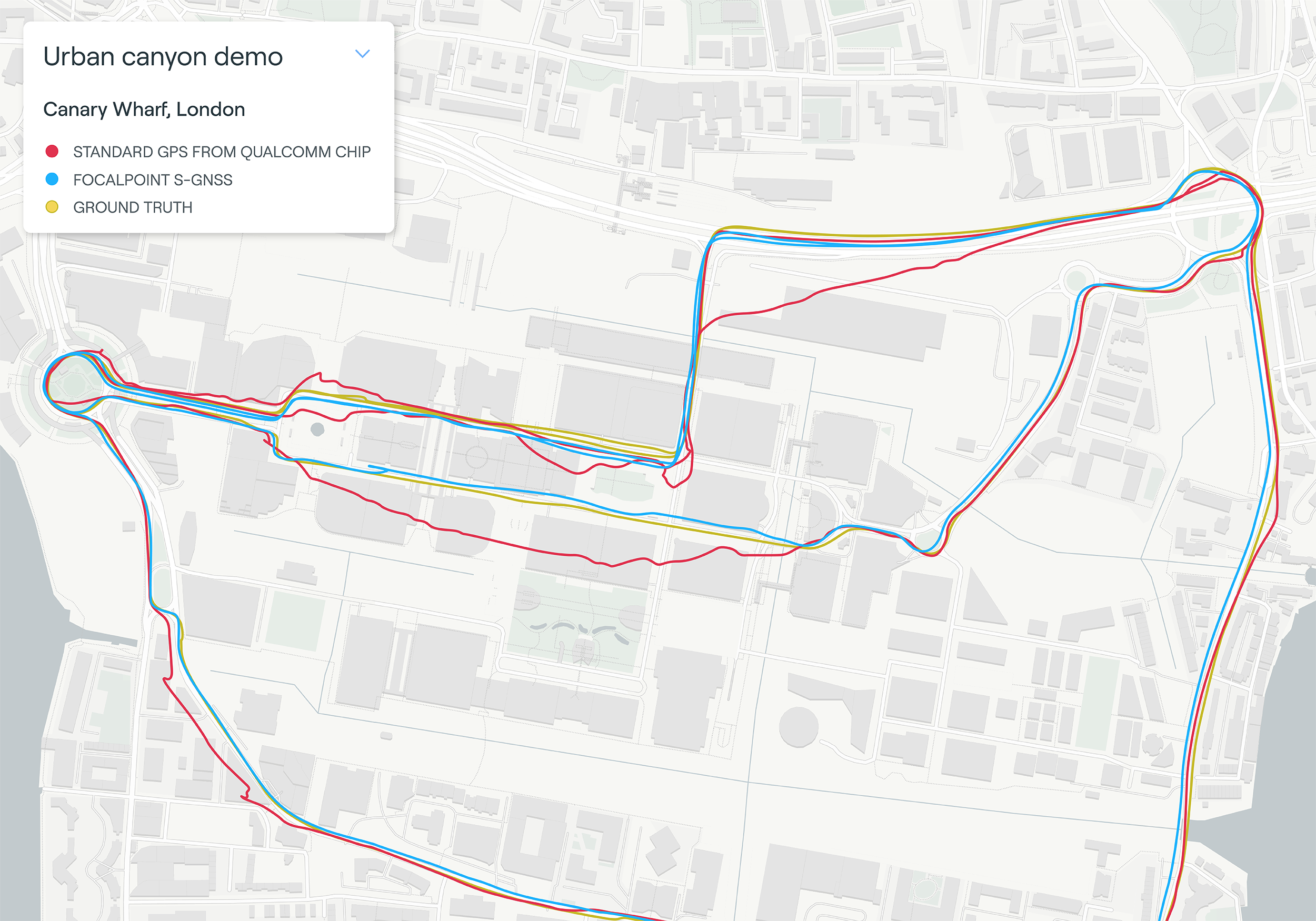
Map plot from live tests in London show the route of a vehicle driven through Canary Wharf. It shows the difference between the position provided by a standard smartphone GNSS chip (red line) and the same data run through Focal Point Positioning’s Supercorrelation software (blue line). (Image: u-blox)
U-blox has signed a deal with the award-winning U.K.-based technology company Focal Point Positioning to integrate technology that will improve the accuracy and reliability of GNSS devices. Focal Point’s Supercorrelation technology enhances positioning performance and security for applications such as smart cities, location-secure internet of things (IoT) and health and fitness wearables.
The patented Supercorrelation technology solves a critical weakness in GNSS caused by multipath interference. Multipath interference occurs when satellite signals bounce off buildings and landmarks, causing GNSS receivers to provide degraded positioning outputs.
The result for users is that the blue dot on their phone or device may be in the wrong place, moving in the wrong direction, or may have a large error ellipse. For autonomous vehicles it could lead to positioning errors that place the vehicle in the wrong lane or worse.
FocalPoint’s Supercorrelation technology uses software to detect and reject reflected signals, resulting in an improvement in the performance of GNSS devices without the need for additional hardware or applications. Supercorrelation also helps with the detection and rejection of GNSS spoofing signals — an increasing concern for autonomous vehicles, ships, and aviation.
“We are tremendously excited to be working alongside a market leader such as u-blox, our mission is to improve every positioning system on the planet and we have taken a giant step forward in that vision with this deal,” said Focal Point Positioning CEO Ramsey Faragher. “Positioning systems are so critical to our world, and we look forward to seeing the next generation of products and services that will be enabled by this higher level of accuracy, reliability and security.”
u-blox CEO Thomas Seiler commented, “The addition of Supercorrelation technology into our latest GNSS platforms is part of our continuing focus on low power consumption, higher accuracy and security for automotive, industrial, and wearable GNSS applications.”
As a result, new cars sold in the contiguous U.S. and Canada equipped with SiriusXM’s Gen8 satellite chipset will be able to receive RTX GNSS corrections, enabling high-accuracy positioning — a key component of autonomous on-road applications.
With the addition of the Trimble RTX Auto software library, any new vehicle that receives SiriusXM broadcasts with a Gen8 satellite chipset can leverage a positioning solution ideal for advanced driving assistance systems (ADAS), autonomous driving (AD) and vehicle-to-everything (V2X) applications.
Because the SiriusXM hardware is already installed in most new vehicles, automotive OEMs can avoid the cost of additional hardware to receive GNSS positioning corrections.
“We are excited to add Trimble RTX Corrections to our suite of Connected Vehicle services,” said John Jasper, senior vice president for SiriusXM Connected Vehicle Services. “By delivering this service over our satellite broadcast network, automakers can access relevant location correction data throughout the contiguous U.S. and portions of Canada to facilitate ADAS, AD and V2X applications without the need to access a cellular network.”
Trimble RTX is a trusted precise-positioning technology of choice for car manufacturers and their suppliers, and was the first solution adopted for production use in passenger vehicles. RTX technology is a critical component of General Motors’ Super Cruise™ system—the first hands-free driving assistance system for the highway. To date, Super Cruise and Trimble RTX have enabled over 5 million miles of hands-free driving on America’s roadways.
Designed for automotive applications, the RTX Auto software library is Automotive Safety Integrity Level B (ASIL-B) certified and developed using the Automotive SPICE process maturity framework (Software Process Improvement and Capability Determination – ISO 15504). The RTX network operation is certified according to ISO 20000 standards, providing further peace of mind for any industry deploying safety-critical applications. No other precise positioning solution offers the same level of performance, reliability, versatility and coverage worldwide.
Trimble RTX technology provides real-time, multi-constellation correction of GNSS observations to provide significantly more precise position estimates. Standard GPS signals can drift up to 25 feet, which could cause incorrect lane identification. When used in conjunction with high-definition maps, cameras, radar and inertial sensors, Trimble RTX provides lane-level positioning performance for semi-autonomous and autonomous vehicles.
“The alliance with SiriusXM provides an expansive distribution pipeline for Trimble RTX into new passenger vehicles,” said Patricia Boothe, senior vice president of Trimble’s Autonomy Sector. “OEMs now have an easy, cost-efficient alternative to bring high-precision GNSS into their vehicles. Together, Trimble and SiriusXM are helping to accelerate the adoption of real-time positioning in connected vehicles, ultimately supporting safety-critical V2X applications.”
Funding from SPRINT will enable Route Masters to collaborate with the University of Leicester on building a full suite of technology tools and algorithmic data models. This will help the company to achieve its aim of becoming the largest integrated public-transport platform for emerging African megacities.
Route Masters is developing an algorithm based on single-band GNSS positioning within cities. The solution will deliver transport flow models superimposed on satellite-based city maps. The technology utilizes applied mathematics to build digital route maps that will accurately deliver journey times and modes for city planning tools and mobile navigation applications for consumers.
This data fusion project will combine dual-band GNSS with single-band GNSS and satellite derived city maps. The solution will be leveraged to deliver planning and control intelligence services and consumer services and, after University of Leicester validation, it will be tested and deployed as an active prototype in Lagos, Nigeria.
The University of Leicester will provide Route Masters with expertise in algorithms and software development for data driven space projects as well as high-performance computational (HPC) facilities.
The project will be funded by a grant from the £4.8 million SPRINT programme that provides unprecedented access to university space expertise and facilities. SPRINT helps businesses through the commercial exploitation of space data and technologies.
“We’re a highly ambitious sustainable business with the goal of creating the largest technology-enabled data platform for transport on the African continent,” Meir Wachs, CEO of Route Masters, said. “The support of SPRINT will enable us to develop our technology in specific areas, working with the Leicester mathematics school to accelerate our development in certain key areas and to build a robust and rigorous solution that can make an actual impact on the world.”
“Projects such as this SPRINT one with Route Masters are of great benefit to the university as they enable us to engage with vibrant companies and transfer our knowledge into commercial innovative applications,” added Alberto Paganini, Lecturer in Applied Mathematics at the University of Leicester.
“We’re bringing advanced mathematical methods, data analysis and software development to the project, not only supporting the commercial development of Route Masters’ technology but also allowing us to integrate the insight gained into our curriculum to further enhance the employability skills of our students.”
Muyiwa Omopariola, Lead Transport Analyst at the Lagos Metropolitan Area Transport Authority (LAMATA) also expressed his support for the project, noting, “I greatly support technology innovation in the transport sector, especially in Lagos and across the emerging world. We look forward to seeing their continued progress.”
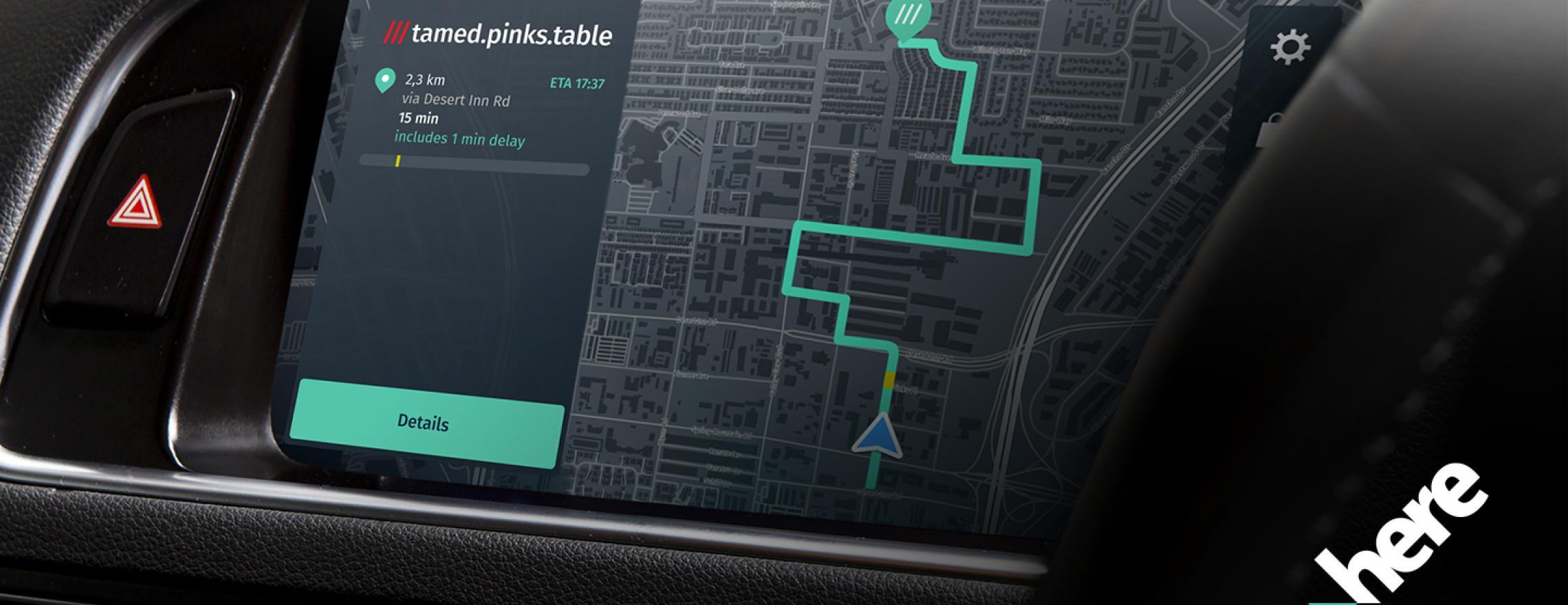
Drivers will now be able to enter what3words addresses directly into their in-car systems, allowing them to navigate to any destination
Image: HERE
HERE and what3words have partnered up to offer the next generation of precision in-car navigation. OEMs using HERE Technologies can now include what3words as an in-car navigation feature, with drivers of enabled vehicles able to navigate to any precise 3-meter square using a what3words address.
HERE is the world’s leading navigation platform with its map data services found in 150 million vehicles worldwide. The platform offers products designed to use the latest location content, such as road networks, buildings and traffic systems. The addition of what3words address entry means that drivers can experience the smartest mapping systems, alongside the break-through address system.
what3words is an innovative addressing system which has divided the world into a grid of 3-meter squares and given each square a unique combination of three words: a what3words address. For example, HERE’s Chicago office can be found at ///memory.traps.lease. what3words enables people to easily convey locations as specific as building entrances or parking spots and it provides easy location references in places with no street addresses, such as beaches, parks and remote hiking trails.
Drivers can input a what3words address directly into their car head unit or connected car app, just as they would a street address or point of interest. Millions of what3words addresses are being used over the world, with drivers finding them in booking confirmations, guidebooks, website contact pages or in messages sent by friends.
Drivers can also discover what3words addresses on the free what3words app or the online map. what3words’ technology has been adopted by global car companies, logistics providers and mobility apps, including Mercedes-Benz, Tata Motors, DB Schenker, Hermes and Cabify.
“HERE is the richest, most accurate and freshest mapping system on the market and it now comes with the easiest way to communicate a location,” Chris Sheldrick, CEO and co-founder of what3words said. “Using a traditional address in a vehicle can be a bad experience. They are clunky and lengthy to type, and even a voice assistant will often mishear you. Once the address is accepted, it won’t take you to a precise location, such as the specific entrance you need, it’ll route you to where the pin drops — which is often the centre of the building.
By using what3words, drivers need simply to enter three words and know they will arrive at that precise 3-metre square. We are seeing increasing demand from automakers and mobility services. Now that we are embedded in HERE, we can enable our address system simply and easily in both new and legacy vehicles.”
“Our partnership with what3words is a solid example of how HERE continues to innovate in the area of navigation,” said Jørgen Behrens, senior vice president and chief product officer at HERE Technologies. “Automotive OEMs and Tier 1 suppliers can now provide the what3words service to their customers with the help of HERE Professional Services instead of having to integrate it themselves. This will allow drivers to navigate easily in dense, urban environments with non-standard addressing schemes or seamlessly get to any location, be it a local pub or a trailhead.”
Incorporating this new feature is easily done for both new and existing clients, with what3words available as an add-on to HERE’s core navigation products.
Speakers include Diana Furchtgott-Roth Deputy Assistant Secretary for Research and Technology; ship captains from Maersk Lines; and representatives from the National Security Council, the Maritime Administration and U.S. Coast Guard.
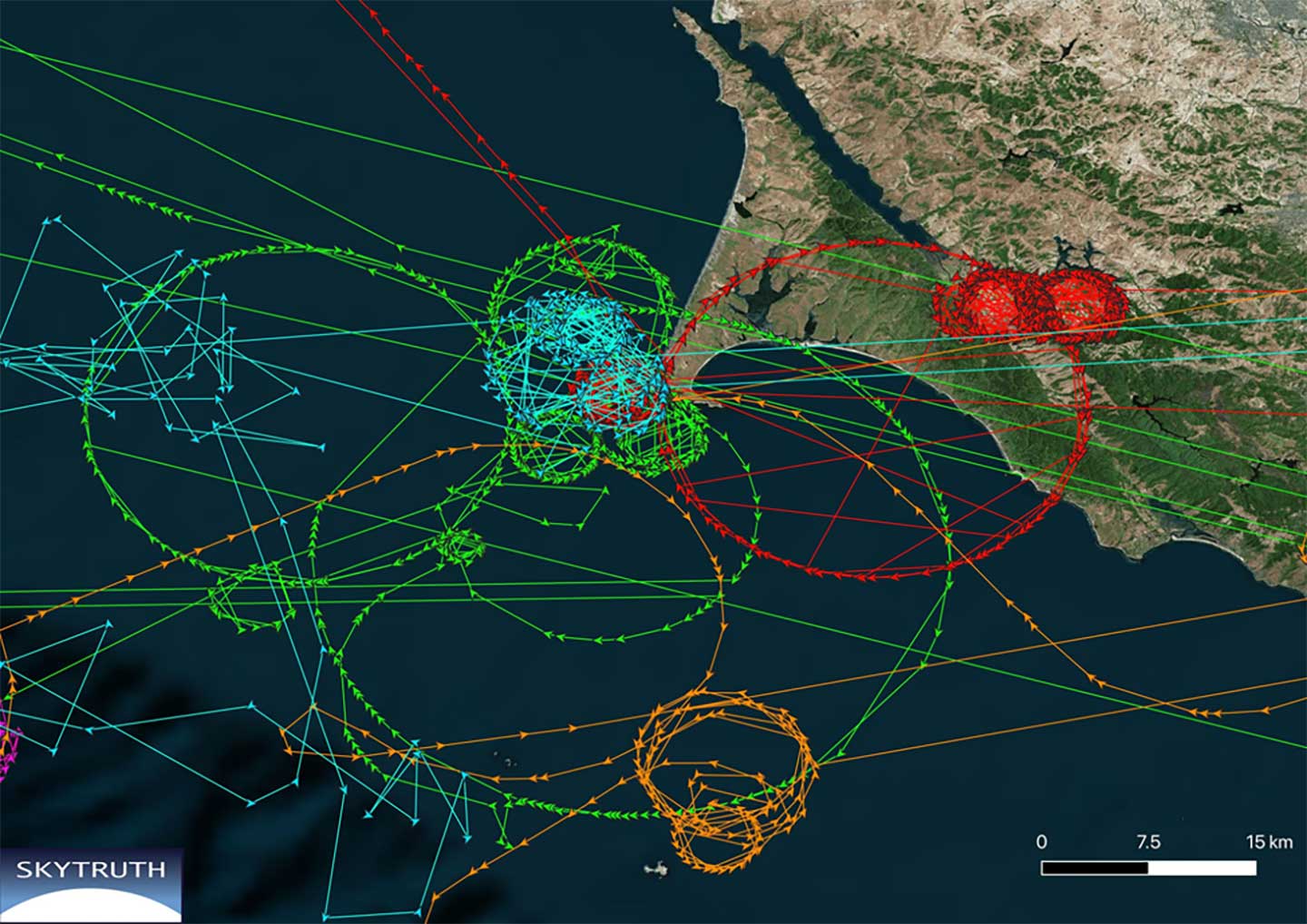
While GPS jamming and spoofing is a problem in many transportation and critical infrastructure sectors, it is often most visible in maritime. This is because the Automatic Identification System (AIS) used for collision avoidance and traffic management for major vessels transmits location data based on GPS inputs.
These transmissions are received by coastal networks and satellite systems. AIS data is often freely available to the public or easily accessed.
Ships in Russian waters being spoofed to inland airports, vessels in Chinese ports reporting they are inland and circling government buildings, and ships in one part of the world transmitting their location as thousands of miles away and circling in the ocean off northern California are three of the highest provide examples in recent years.
In 2019, the U.S. Coast Guard brought interference with GPS signals as an “urgent issue” to the International Maritime Organization.
In February, President Trump issued an Executive Order on responsible use of positioning, navigation and timing. This workshop is part of the federal government’s efforts, as a part of the order, to educate the public about vulnerabilities associated with over-reliance on GPA.