The MPS865 GNSS receiver is designed for marine positioning.
Trimble has debuted the MPS865 marine positioning system multi-frequency and multi-application GNSS receiver.
The Trimble MPS865 is a versatile, rugged and reliable GNSS positioning and heading solution for a wide variety of real-time and post-processing applications for marine survey and construction.
It features integrated communications options such as Wi-Fi, UHF radio, cellular modem for internet connectivity, Bluetooth and MSS satellite-based correction channels.
The patented GNSS-centric technology uses all available GNSS signals to deliver reliable positions in real time. The GNSS receiver provides for the connection of two GNSS antennas for precise heading.
With a modular form factor, the MPS865 is flexible and can be used as an integrated on-board rover receiver, a base station or a continuously operating reference station. According to Trimble, the built-in precise heading feature ensures the receiver is of minimal size, consumes less power and has less cabling, which are all benefits when on-board space it at a premium.
The MPS865 adds new features to improve usability in a congested marine construction site – multi constellations, cellular connectivity and beacon support. The multi-constellation option maintains productivity in marine sites or when antennas or satellites are partly obstructed.
At many sites, the receiver can use the free-to-air beacon support. When coupled with GA830 antennas, the MPS865 will receive the free-to-air beacon signals to deliver sub-meter accurate horizontal positioning in many parts of the world. It always delivers precise heading even when no GNSS corrections are received.
The marine receiver also has cellular, making it easier to use Internet Base Station Service (IBSS) and VRS corrections over the internet as well as communicate with the receiver via the internet and SMS messages. The receiver also can be used as a data access point on the vessel to download design files or for immediate remote support.
The MPS865’s design enables a broad range of mounting capabilities and built-in communication options. Features include an internal removable battery, internal memory and optional accessory kits for specific applications.
The receiver is also compatible with a variety of software solutions including the new Trimble Marine Construction software.
The weatherproof, high-impact-resistant moulded aluminium housing protects it in extreme marine conditions or base-station applications.
“With the addition of the MPS865 receiver to our portfolio, Trimble has introduced a new generation of rugged, compact and feature-rich GNSS, a solution the marine industry has been needing for some time,” said Scott Crozier, general manager of Trimble’s Civil Engineering & Construction Division. “This highly flexible and capable receiver can be combined with our marine construction software providing contractors with a market-leading solution for any marine survey or construction application.”
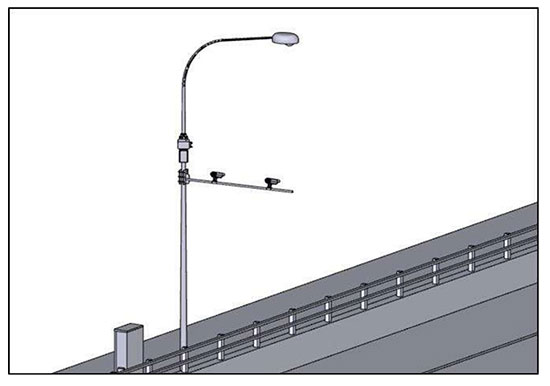
The Singapore Land Transport Authority (LTA) has begun testing an Automatic Number Plate Recognition (ANPR) camera system with Dedicated Short Range Communications (DSRC) beacons at various locations along expressways and major thoroughfares.
The testing started March 26 and will conclude in 2019.
An example of the equipment that will be mounted on existing roadside infrastructure. (Image: LTA)
The use of ANPR technology will facilitate enforcement, while DSRC beacons will also be installed in some areas to enhance positioning accuracy in Singapore’s highly urbanized environment.
The tests will enable LTA to determine the performance and reliability of such technologies under various real-life environmental and traffic conditions for future traffic management systems that will leverage GNSS technology.
The technologies being tested do not require heavy physical infrastructure and will be mounted on existing roadside infrastructure such as overhead bridges, overhead gantry signages and lamp posts, as well as EMAS gantries.
Testing equipment will also be mounted onto vehicles, which will be deployed at localized areas such as Tuas South from April 2018, before expanding island-wide for testing.
In 2016, LTA awarded a S$556 million contract to the consortium of NCS and Mitsubishi Heavy Industries Engine System Asia to build a next-generation electronic road pricing system based on GNSS technology, reports Channel NewsAsia.
The new system will allow motorists to be charged according to distance traveled on congested roads, removing the need for physical gantries.
An example of the equipment that will be mounted onto vehicles. (Image: LTA)
Police say a video from the Uber self-driving car that struck and killed a woman on March 18 shows her moving in front of it suddenly, according to Bloomberg Technology.
Uber Technologies Inc. halted its autonomous vehicle tests after one of its cars struck and killed a woman in Tempe, Arizona, in the first pedestrian fatality involving the technology.
A backup driver was behind the wheel but not operating the vehicle. “The driver said it was like a flash, the person walked out in front of them,” Sylvia Moir, the police chief in Tempe, Arizona, told the San Francisco Chronicle. “His first alert to the collision was the sound of the collision.”
The Uber had a forward-facing video recorder, which showed the woman was walking a bike at about 10 p.m. and moved into traffic from a dark center median.
“It’s very clear it would have been difficult to avoid this collision in any kind of mode,” Moir said.
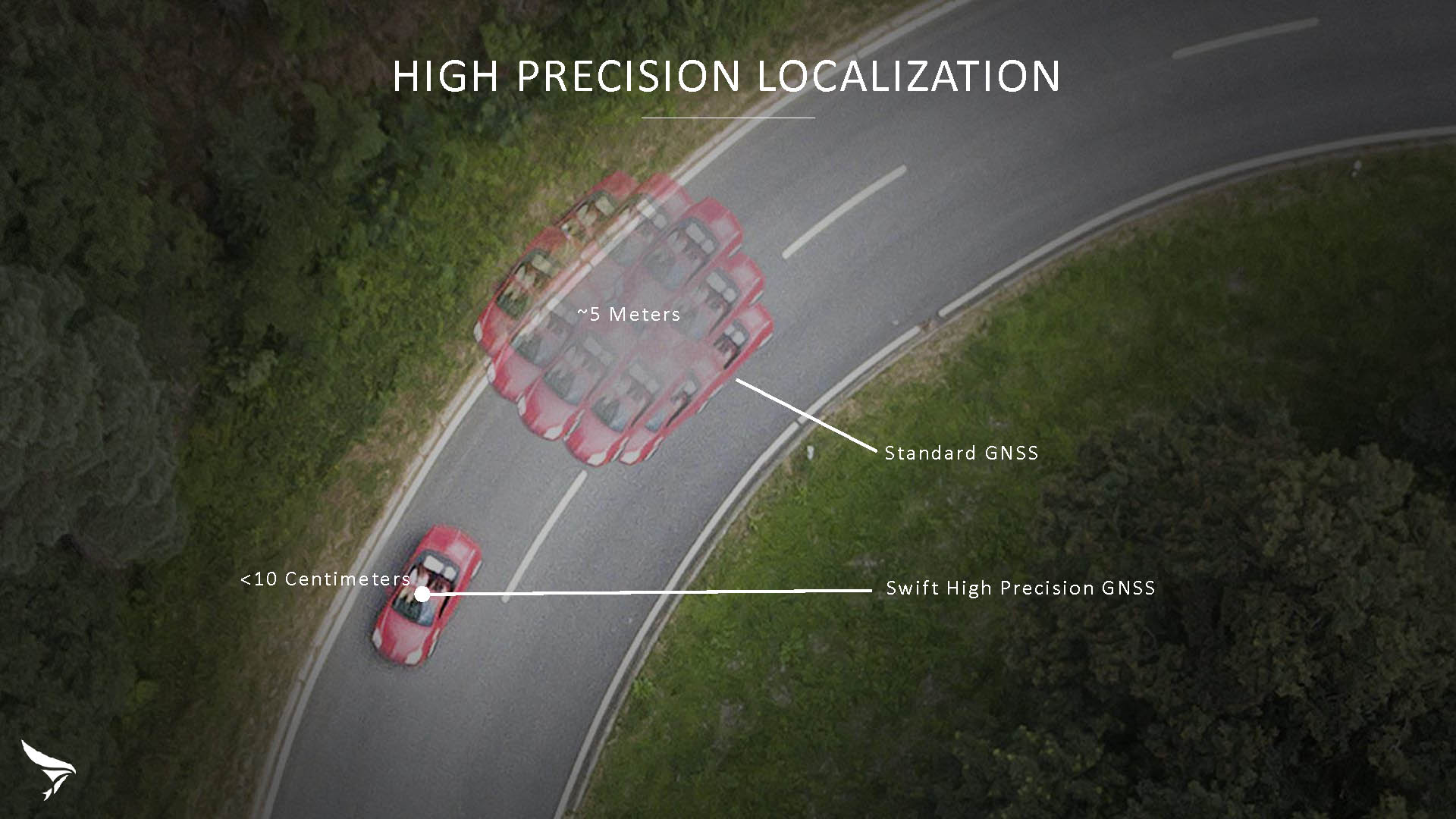
Swift Navigation has released Skylark, a cloud-based GNSS corrections service delivering centimeter-level accuracy without deploying and maintaining a GNSS network. Skylark targets autonomy applications at scale and enables high-precision positioning for mass market automotive and autonomous vehicle applications.
Skylark works with both of Swift’s multi-band, multi-constellation GNSS receivers, the Piksi Multi and the Duro ruggedized industrial receiver. Swift added GLONASS support in its 1.4 firmware upgrade, announced earlier this month, and aims to include Galileo and BeiDou in the near future.
Previously known as a hardware company, Swift Navigation appears to be shifting its focus a bit, including an Internet-delivered service in addition to its GNSS receivers. It has recently focused more closely on the automotive sector; it also has customers in drone technology, robotics and precision agriculture.
Its new platform for high-precision GNSS navigation of autonomous vehicles, via Internet connectivity, Skylark delivers fast convergence times measured in seconds, using positioning algorithms to provide a continuous stream of data to individual devices from the cloud. The data stream allows for quick and robust positioning and high reliability and availability, even in challenging environments, according to the company.
The Skylark service offers accuracy at the centimeter level. (Image: Swift Navigation)
Critical requirements for real-time absolute localization through GNSS for the automotive sector, according to Fergus Noble, co-founder and CTO of Swift Navigation, are:
high accuracy; centimeter level
availability; fast convergence, measured in seconds
integrity
scalability to support a large vehicle population
low cost.
Internet-Delivered via Cell Network
The last two requirements are fulfilled by the cloud-based approach. He characterized Skylark as a hybrid of RTK (Real Time Kinematics) and PPP (Precise Point Positioning) approaches augmented by Swift’s intellectual property, with corrections delivered over the Internet as provided by the cellular network, which he described as “robust to outages.” Cell coverage along road networks is good, Noble asserted, and 5G applications are increasing that coverage and will further enable connected vehicles. Automotive OEMs are comfortable with the level of cell coverage for this application, according to him. There has been testing to show robustness in most rural areas, and network operators are dedicated to increasing this.
“Skylark operates like a utility,” said Noble. “It is a simple, low-cost Internet data stream that provides customers with a complete high-integrity GNSS solution. Simply supply a Swift receiver with power and Internet connectivity and get real-time corrections for highly-dynamic GNSS applications.”
To realize the Skylark service, the company hired a team of cloud-based engineering experts who had a role in building Amazon and Oracle critical infrastructure. Swift Navigation is initially launching only with its own devices, but is making the service publicly-available for any customer in any vertical requiring precise positioning. “Every car company is building in autonomous functionality,” noted Noble, making clear who the company is ultimately targeting.
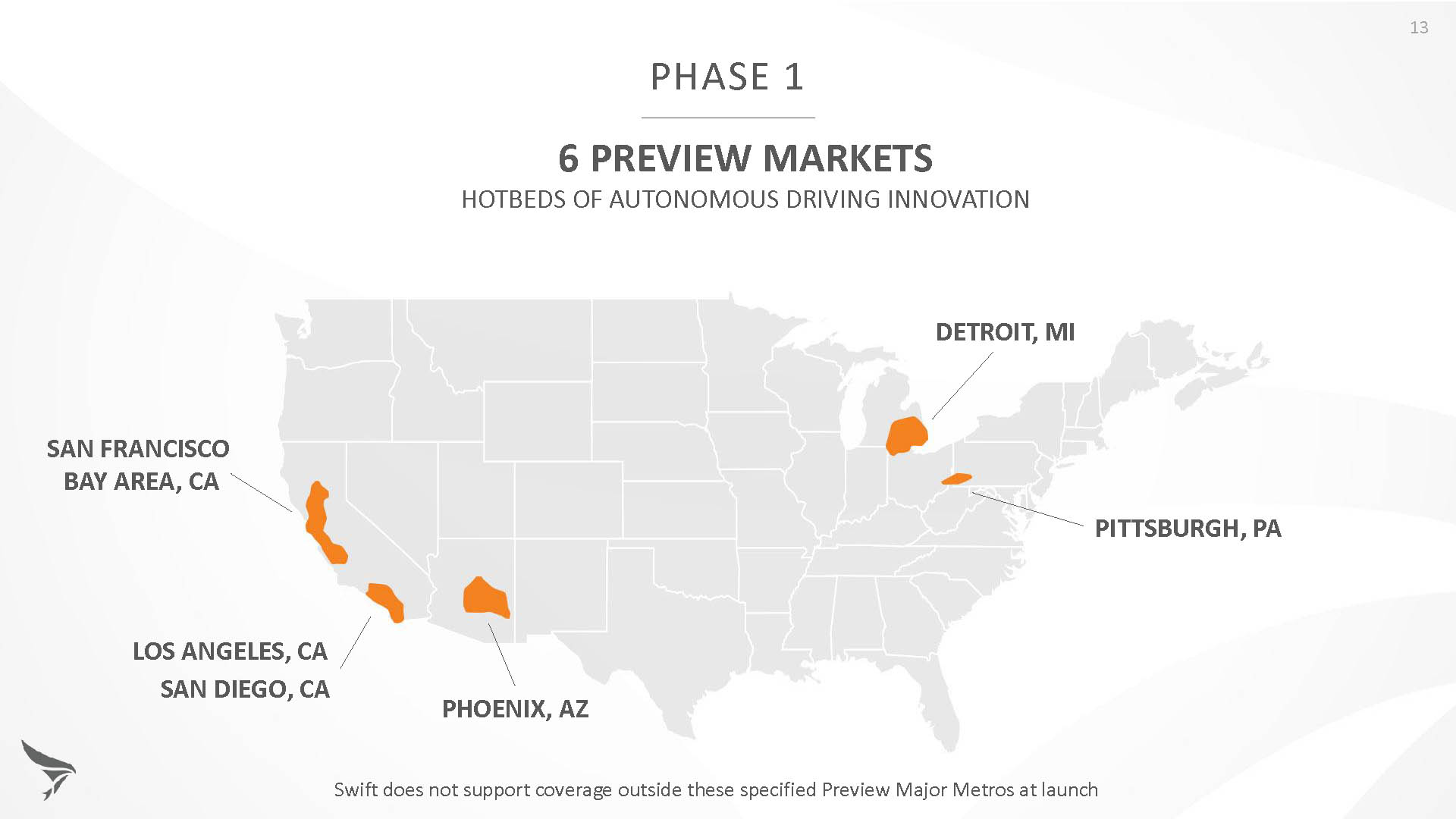
Skylark is currently offered in six metropolitan markets. (Image: Swift Navigation)
Swift has been working with beta customers for more than a year and is now previewing the service to all customers in six metropolitan markets: the San Francisco Bay Area, Los Angeles, San Diego, Phoenix, Pittsburgh and Detroit. The company envisions full contiguous U.S. and ultimately global expansion. Customers in preview areas with Swift receivers can sign up for Skylark and immediately start receiving corrections.
The service maintains low bandwidth to save on data costs and is offered with a free 30 day trial and flexible pricing plans. Skylark’s pricing structure includes a monthly plan and an annual plan. Enterprise pricing is available for volume orders.
Voyage Self-Driving Car Active Service and Coming Expansion
An early beta user of the service, Voyage deploys self-driving taxis in private communities across North America. “Skylark and Piksi Multi are working safely and efficiently in a real-world application today at The Villages, a retirement community in San Jose, California,” said Oliver Cameron, co-founder & CEO of Voyage.
Voyage incorporates Skylark GNSS corrections in controlled road networks in private communities. (Image: Swift Navigation)
Voyage’s passenger cars carry a roof-racked suite of sensors: the Swift Navigation Piksi Multi GNSS receiver, LiDAR, cameras, radar, and an inertial measurement unit. A computer in the trunk integrates all sensor signals and uses the car’s CAN bus to operate steering, braking, and other functions. An operator sits behind the wheel at all times, sometimes with a co-pilot: one to watch the road ahead, and one to watch the software. “Safety is our first priority,” said Cameron.
The service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. (Image: Swift Navigation)
The Voyage fleet stays within the bounds of a given community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in metropolitan cities. The first in the San Jose area serves private community of more than 4,000 residents, with a 15-mile road network. Today, residents are able to summon a Voyage self-driving taxi using a smartphone app and have a ride waiting at their front door. This service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. Voyage takes residents of The Villages to and from the gym, to visit with friends, to the golf course and to community center events.
Image: Swift Navigation
Voyage will next deploy the Swift product suite in its upcoming deployment launching to 160,000 retirees at The Villages complex in Florida, over a road network of 750 miles. It is currently in a “Q/A” testing phase on that site, working the technology and the local mapping through their paces.
The U.S. Federal Railroad Administration (FRA) released a status update on its efforts to assist railroads in implementing positive train control systems (PTC), along with the railroads’ self-reported progress for the fourth quarter of 2017.
The FRA said in a press release that it is taking a proactive approach to ensure railroads acquire, install, test and fully implement certified PTC systems in time to meet the congressional interim deadline of Dec. 31.
“It is the railroads’ responsibility to meet the congressionally mandated PTC requirements,” said FRA Administrator Ronald L. Batory. “The FRA is committed to doing its part to ensure railroads and suppliers are working together to implement PTC systems.”
Between Jan. 2 and Feb. 14, FRA’s leadership hosted face-to-face meetings with executives from each of the 41 railroads subject to the statutory mandate to evaluate each railroad’s PTC status and learn what remaining steps each needs to take to have a PTC system fully implemented by the December deadline or, at a minimum, to meet the statutory criteria necessary to qualify for an alternative schedule.
The FRA is now meeting with PTC suppliers to learn more about their capacity to meet the high demands for railroads’ implementation of PTC systems in a timely manner.
PTC systems are designed to prevent certain train-to-train collisions, over-speed derailments, incursions into established work zone limits, and trains going to the wrong tracks because a switch was left in the wrong position.
All railroads subject to the statutory PTC implementation mandate must implement FRA-certified and interoperable PTC systems by the end of the year.
Under the Positive Train Control Enforcement and Implementation Act of 2015, however, Congress permits a railroad to request FRA’s approval of an “alternate schedule” with a deadline beyond Dec. 31, 2018, but no later than Dec. 31, 2020, for certain non-hardware, operational aspects of PTC system implementation.
The congressional mandate requires the FRA to approve a railroad’s alternative schedule with a deadline no later than Dec. 31, 2020, if a railroad submits a written request to FRA that demonstrates the railroad has met the statutory criteria set forth under 49 U.S.C. § 20157(a)(3)(B).
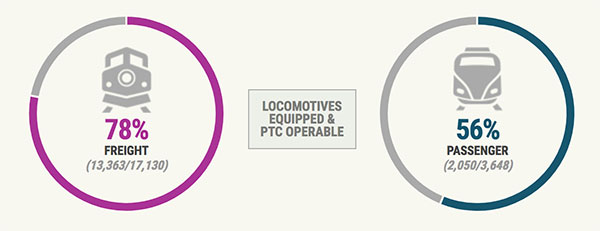
The fourth quarter data, current as of Dec. 31, 2017, shows PTC systems are in operation on approximately 56 percent of freight railroads’ route miles that are required to be governed by PTC systems — up from 45 percent last quarter and 16 percent on Dec. 31, 2016. Passenger railroads have made less progress, with PTC systems in operation on only 24% of required route miles, unchanged from the previous quarter.
The latest data confirms that railroads continue to make progress in installing PTC system hardware, with 15 railroads reporting they have completed installation of all hardware necessary for PTC system implementation and another 11 railroads reporting they have installed over 80% of PTC system hardware. In addition, all but three railroads report having acquired sufficient spectrum for their PTC system needs.
For more key implementation data for the fourth quarter, see the infographics here.
To view the public version of each railroad’s Quarterly PTC Progress Report (Form FRA F 6180.165, OMB Control No. 2130-0553) for Quarter 4 of 2017, visit each railroad’s PTC docket on https://www.regulations.gov/. Railroads’ PTC docket numbers are available at https://www.fra.dot.gov/Page/P0628.
Sygic is partnering with innovative addressing system what3words.
According to Sygic, its business solutions and consumer apps are used by more than 200 million drivers and 2,000 fleets worldwide including Amazon. Sygic is also the first GPS app to partner with Ford.
The partnership will initially focus on Sygic’s business solutions for taxi, public transport, delivery and construction clients with the aim of a wider integration into Sygic’s commercial products. Clients will be able to turn on three-word addressing within their existing solutions in the coming months.
what3words is a location reference system that has divided the world into 57 trillion 3 x 3-meter squares, each with a unique three-word address. For example, “///droplet.outings.panel” will take you to the front door of Sygic’s headquarters in Bratislava.
“Sygic is committed to exploring the boundaries of navigation, a philosophy that has directly contributed to our enduring reputation as the leader in navigation,” said Martin Strigac, Sygic CEO. “what3words is the simplest way to talk about location and its rapid adoption across sectors means it is quickly becoming a standard. To get from A to B,, you need a map, navigation and to know precisely where A and B are. With what3words, we can now offer a world-class solution across all of these.”
“In-car navigation relies on an antiquated street and postal address system that is no longer fit-for-purpose,” said Chris Sheldrick, CEO and co-founder of what3words. “Poor addressing leaves drivers frustrated and means businesses waste millions every year. We are delighted to partner with Sygic to offer their business customers a more efficient solution to the last-mile challenge.”
Sygic featuring what3words will be showcased at the Post & Parcel Conference, being held March 20-22 in Berlin.
By Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura
All images provided by the authors
A real-time system combining a simulator and a GNSS propagation model reproduces an authentic multipath environment. The propagation model relies on a 3D-model reconstruction of the urban environment, which generates a multipath signature strictly dependent on the location of the receiver’s antenna. This yields important results for a moving vehicle, which may be affected by very different multipath conditions depending on trajectory and location.
Positioning and navigation can be degraded in urban environments by multipath, and the error can increase considerably if not properly compensated. In situations where the line-of-sight (LOS) is obscured by surrounded buildings, the receiver may still be able to navigate by using the non-line-of-sight (NLOS) signal, which originates from single or multiple reflections/diffractions of the GNSS signal.
The use of 3D models has been one of the preferred solutions to recreate the multipath environment as seen by a GNSS device. This solution brings the capability to generate a multipath signature that is representative of the position of the antenna in a specific time and space. However, this solution comes with a certain degree of complexity. In fact, an accurate 3D model is required to simulate the obscuration of the GNSS signal, and a good propagation model is needed to generate phenomena like reflection and diffraction.
Figure 1. Example of propagated signal simulation. (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura))\
3D models have become more accurate and widely available and are mainly used to predict the satellite availability in specific locations, for example in evaluating the signal availability in urban canyon, and for both reflection and diffraction. Other uses of 3D models are as an aiding tool to assist navigation, sometimes together with an INS solution.
In this article, we present a novel real-time system capable of simulating realistic multipath in different environments. The system can simulate multiple GNSS constellations and is comprised of a GNSS simulator interfaced to a propagation model. The system can create a whole range of signals, effects, error models and trajectories in a real-time closed loop. The propagation model controls the simulation of multipath from the interaction of the GNSS signal with the 3D scene and objects. This article describes a novel real-time system for the simulation of realistic multipath in different environments and compares simulated and field-test data. The comparison is based on signal availability, horizontal error, carrier-to-noise (C/N0), pseudorange and Doppler residuals.
RAY-TRACING WITH 3D MODELING
The model simulates the propagation of GNSS signals in constrained environments, considering obscurations and multipath. It uses a proprietary ray-tracing kernel (based on bounding volume hierarchy techniques using processing unit [GPU] resources) coupled with geometrical optics and uniform theory of diffraction to compute the interaction between the signal and the local environment. The computation uses as main input a synthetic environment (that is, geometrical and physical modeling of a real or realistic environment) to assess the impact of obscurations related to signal availability issues and multipath (the cause of fading effects and performance problems).
The objective of ray-tracing is to find all the possible paths from the observer to the source of the signal considering a limited number of interactions per emitted rays. A ray-tracer (or ray-tracing algorithm) uses a primary grid to cast primary rays. Then, it iteratively computes the possible interactions between these rays and the virtual scene (often defined using triangles). If those interactions exist (if they comply with the law of physics) and if the number of interactions to reach the emitter is below the maximum number of interactions set by the user, then a ray (or multipath) is created. This is a deterministic method that can be used to calculate the obscuration due to the local environment (and therefore detect the signal availability) and the geometrical characteristic of the computed path. Combined with physics modeling, path attributes such as received power, delay, Doppler, and phase are also provided.
The main characteristics of ray-tracing techniques to model GNSS propagation are:
All the signals arriving at the receiver can be model-based on the virtual environment.
As it is a deterministic method, the more realistic the environment modeling, the more compliant with reality the results. Moreover, the simulation results are repeatable.
The specular multipath can be displayed in 3D, and the attributes (for example, receiver power, phase, polarization, Doppler, geometry of the ray) are known. For example, this is relevant when the effect and signature of the environment on the propagation signal need to be studied and understood.
Nonetheless, ray-tracing techniques must account for three major difficulties:
They are time-consuming algorithms. Indeed, depending on the complexity of the scene (defined in terms of the number of triangles), a combinatorial problem to find the possible multipaths reaching the receiver makes the ray-tracer very resource-demanding. That is the reason why the most difficult task to achieve during the coding of a real-time ray-tracing algorithm is to develop acceleration techniques to quicken the computation process. Several solutions exist to either improve the intersection determination (for instance, based on spatial hierarchies such as bounding volume hierarchy [BVH] techniques), or to decrease the number of cast rays (often based on adaptive sampling techniques), or even to replace rays with beams or cones. Moreover, it is possible today to use the resources of graphic boards to accelerate the computation. Indeed, as ray-tracing can be coded by a large number of primary functions that can be treated simultaneously, it can be easily ported into GPU.
Their accuracy depends on the resolution of the primary grid. Details and therefore rays may be missed if the 3D scene is made of small details. This issue is called aliasing. Aliasing artefacts are raised for instance in parts of the scene with abrupt changes (such as edges) or in complex areas with lots of constituent objects. Solutions (or antialiasing techniques) exist to overcome this issue such as adaptive or stochastic samplings.
When it is combined with geometrical optics, these algorithms only compute the specular rays. Even if some techniques exist to model the scattering signals, only physical optics can render the global signal with high fidelity.
MULTIPATH SIMULATION SYSTEM
The proposed system can model two of the main propagation issues encountered in urban environments, such as obscuration (which leads to limitations in signal availability) and multipath (which generates interference that causes fading of the signal and positioning errors). To model realistically such a complex phenomenon, the system uses a GPU ray-tracing algorithm combined with geometrical optics and uniform theory of diffractions. The ray-tracing algorithm relies on 3D-model reconstructions of the urban environment. The computed obscuration and multipath effects are then used to generate signal corrections (in terms of power, delay and Doppler variation) to be used in the GNSS simulator, which generates the carrier, code and navigation messages for different GNSS constellations into a single RF output. Some of the advantages of this system is its ability to run in real time, and to visually show all the reflections/diffractions of the GNSS signals that cause multipath interference.
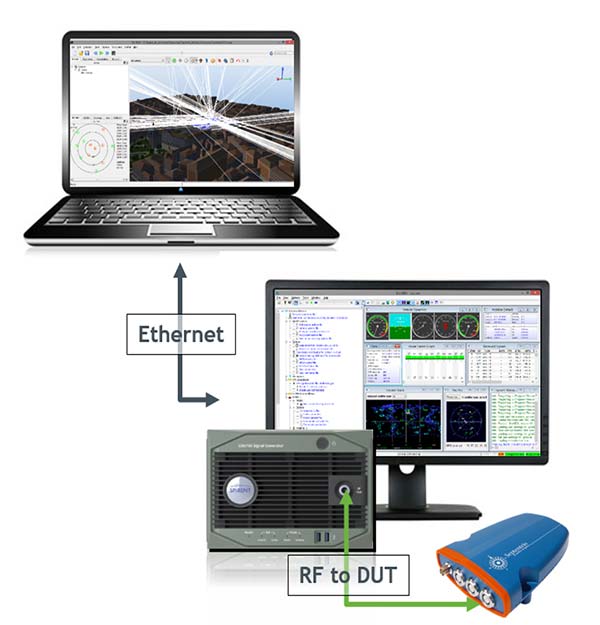
Figure 2 shows the diagram of the system set up in conductive mode. The system includes a SE-NAV PC controller, simulator software suite controller, GNSS simulator and device under test (DUT). A different mode is also available called over the air (OTA). This mode uses an anechoic chamber and a set of antennas distributed uniformly to generate the RF signal including the multipath. The DUT can then be placed at the center of the chamber and will be able to receive LOS and NLOS signals from different angles of arrival.
Figure 2. System diagram that shows propagation simulator controller (top), the GNSS simulator (bottom) and the device under test connected to the RF output of the simulator. (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
The GNSS simulator software suite is used to generate and control the generation of the satellite signals (including multipath) at RF, whilst the propagation simulator is used to calculate the propagation information (delay, Doppler and attenuation) of the reflected signals through a 3D urban model. The propagation software is interfaced with GNSS simulator software by means of a package of remote-control facilities that greatly enhances the flexibility of the propagation simulator. Those commands can be sent and received through the transmission control protocol/use datagram protocol (TCP/UDP) with different data streaming rates (10 Hz was used for this article).
It is also important to point out that the propagation simulator computes all the possible multipath signal generated by the 3D model given the position of the satellites and receiver. However, the physical limitation of the number of channels in the simulator causes the rejection of some rays. This rejection or filtering process can be done according to power (used in this article) or delay.
EXPERIMENT SET-UP
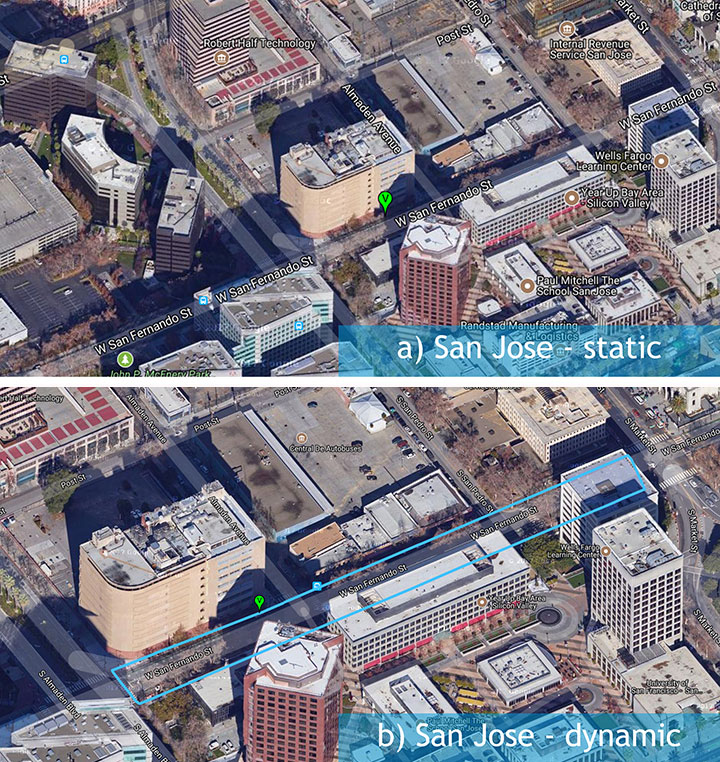
A set of different field-test campaigns where carried out in August 2016. Each campaign aimed to evaluate the ability of the system to assess the performances of a GNSS receiver using simulated signals in urban environments. Figure 3 shows the trajectory (blue line) used for the experiment in an urban environment — San Jose, California — with a static (a) and dynamic (b) scenario.
Figure 3. A set of three measurement campaigns where carried out during Aug. 9–10, 2016: a) urban environment with static antenna; b) urban environment with dynamic antenna. (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
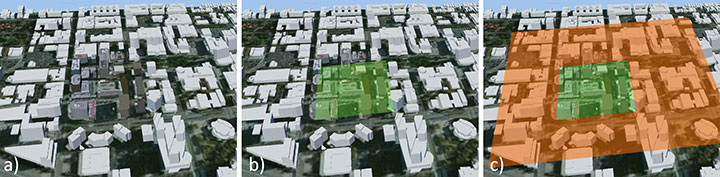
Figure 4 shows the 3D scene used to replicate the San Jose urban environment. The buildings in close proximity of the antenna (green area in Figure 4b) contain details like material, 3D facade and windows. In contrast, the buildings far from the antenna were only corrected for height, and the material was modeled as concrete only.
Figure 4. The San Jose model contained most of the details around the receiver antenna (b), with only height corrected for buildings far from the antenna (c). (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
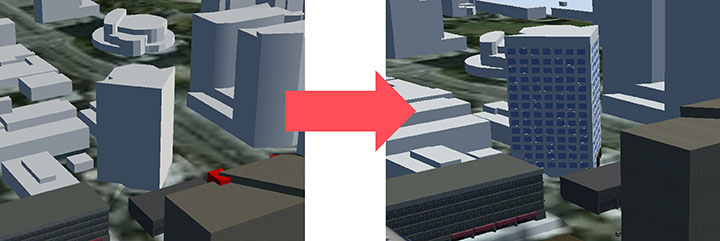
An exception was made for one building in San Jose because its complex architecture was believed to contribute to more reflected rays than would a more simplistic box (concrete) model (Figure 5).
Figure 5. Improvement (right) in one San Jose building because its complex architecture was believed to generate more reflections than the more simplistic box model (left). (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
EXPERIMENT RESULTS
A direct comparison of C/N0 power, pseudorange residual, and Doppler residual was performed between the field test and simulation.
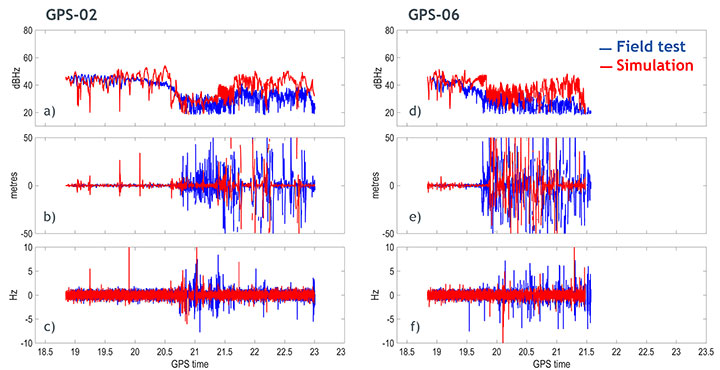
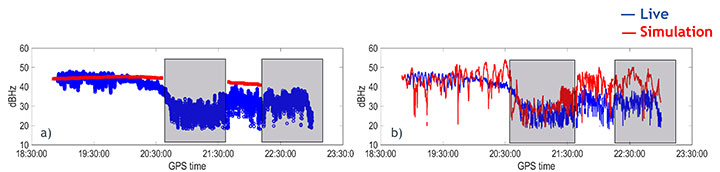
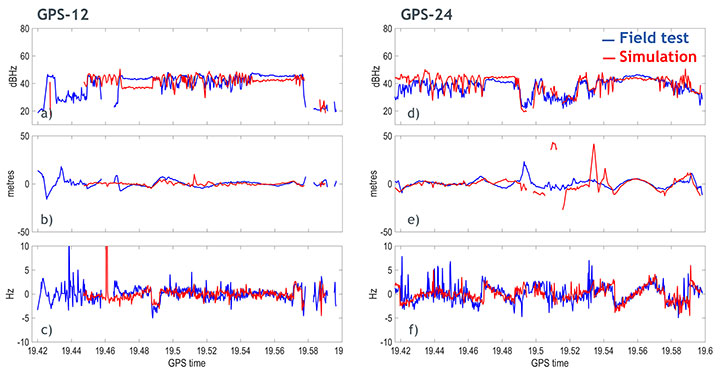
San Jose Static Results. Figure 6 shows the results obtained from the San Jose static scenario for satellites PRN02 and PRN06: C/N0 ratio, pseudorange residual and Doppler residual for field test (blue line) and simulation (red line). Although the simulation sometimes creates deeper fading than in the field test, a first comparison indicates a good correlation of simulated data with field-test data.
Figure 6. Carrier-to-noise ratio (top), pseudorange residual (middle) and Doppler residual (bottom) for PRN 02 (left column) and PRN 06 (right column). (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
The signature of the multipath caused by this urban environment is visibly captured in the simulation. More interestingly, the pseudorange residuals and, to a lesser extent, Doppler residuals also indicate that the model is replicating the dynamics of the multipath environment in close correlation with the field test.
Figure 7 shows the C/N0 obtained from the field data (blue), and simulated data (red) with only obscuration (a) and with obscuration and multipath (b) for the static scenario.
It can be noticed that the receiver can still track PRN02 without the LOS, therefore, relying on just the NLOS signal. This can be clearly seen in Figure 7a where a sudden drop in power is associated to an obscuration of the same satellite (based on our 3D urban model).
Figure 7b shows the C/N0 obtained from the simulation (red line) when both obscuration and multipath were enabled. In this case the receiver could track the satellite even in the case of only NLOS as in the field test.
Figure 7. Carrier-to-noise ratio for satellite PRN02 with only obscuration (a) and with multipath (b). (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
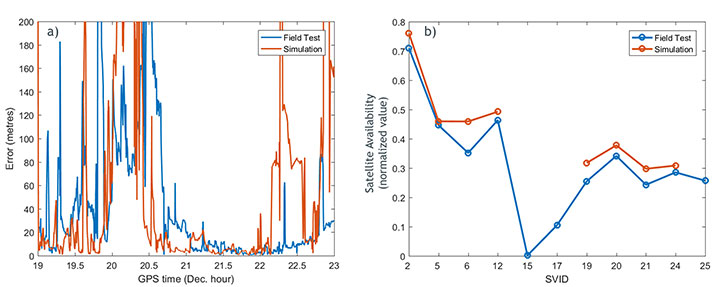
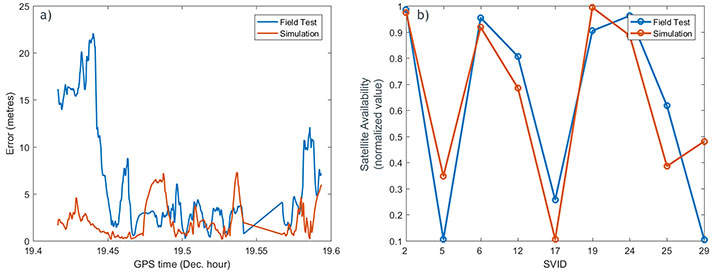
The positioning error for the San Jose static scenario is shown in Figure 8a. The simulation and field-test data have a comparable error. The error is relatively big at the beginning of the simulation and decreases after time 20.6. At the time 22.3, a moderate increase in the positioning error is visible in the field data until the end of the test. The simulation also shows a similar trend in this last part of the test, but tends to generate a higher positioning error.
The satellite availability is shown in Figure 8b for both simulated (red) and field test (blue). The availability of the satellites generated with simulated data is in close relationship with the field data. However, some satellites could not be tracked in the simulation.
Figure 8. a) positioning error for field-test (blue) and simulation (red); b) satellite availability for field data (blue) and simulation (red). (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
The importance of the accuracy of the 3D scene is evident in this example. In fact, we noticed that one of the buildings that was simulated as a simple concrete box was more complex in the real environment. Therefore, we applied some modifications to scene, as in Figure 9.
Figure 9. 3D scene improvement. (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
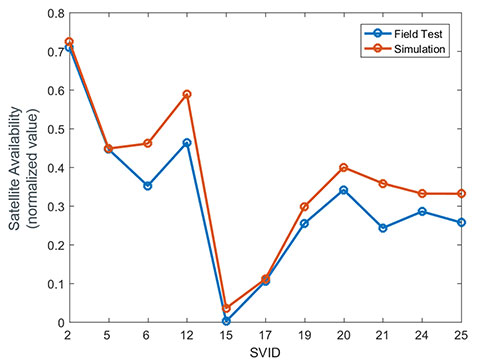
After those changes, a general improvement in the results was visible, but most importantly, the missing satellites could finally be tracked by the receiver (Figure 10).
Figure 10. Satellite availability for field data (blue) and simulation after scene improvement. (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
SAN JOSE DYNAMIC TEST RESULTS
Similar results were obtained with the dynamic test in San Jose. Figure 11 shows the results obtained for satellites PRN12 and PRN24. The walking trajectory included two points where the antenna was stopped because of a traffic light. Those points correspond to a relatively flat C/N0 that can be clearly seen in the field test and simulation data for both PRNs. When, instead, the antenna was moving, a higher variation in the C/N0 is noticeable in both simulation and field test.
Figure 11. Carrier-to-noise ratio (top), pseudorange residual (middle), and doppler residual (bottom) for PRN 12 (left column) and PRN 24 (right column). (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
Figure 12a illustrates the positioning error obtained from simulated (red) and field test (blue). The first part of the simulation produced an error smaller than the one obtained from field data. However, from the time 19.48, a good agreement can be seen. The satellite availability is also shown in Figure 12b. This last result was obtained with the improved model described in Figure 9.
Figure 12. (a) Positioning error for field-test (blue) and simulation (red); (b) satellite availability for field data (blue) and simulation (red) after scene improvement. (Image: Tommaso Panicciari, Mohamed Ali Soliman and Grégory Moura)
CONCLUSIONS AND FUTURE WORK
A new real-time system for multipath simulation is designed to generate realistic multipath that depends on time, position and type of urban environment. The 3D scene is used to calculate the multipath (reflection and diffraction) caused by the buildings and objects around the antenna.
Some first results demonstrated that realistic multipath can be generated by simulating reflections and diffractions even with a simple 3D model. However, the inclusion of finer details in the model can improve the simulation and make it even closer to reality.
As always, simulation interest is a tradeoff between reliability in all conditions and efforts to adapt (that is, to specify) a generic and simple model. The added value of our model consists in its simplicity and its good compliance with field data.
Ray-tracing techniques coupled with geometrical optics and uniform theory of diffraction are efficient and simple methods to simulate the propagation of GNSS signals in complex urban environments. Their efficacy is demonstrated by a good agreement between simulation and field measurements. Some discrepancies still exist and are due to the limitations of such a model:
The accuracy of the model is never perfect and, as ray-tracing is a deterministic method, the returned results strongly depend on the quality of the input data used to generate the model.
Geometrical optics is a simple (but efficient) method. Only specular rays are modeled, thus the system won’t be able to generate all the signals coming from other phenomena such as scattering. Another limitation is given by the hardware. In fact, the number of simulated multipath depends on the number of available channels in the simulator.
The simulation parameters try to mimic the field conditions. However, the simulated trajectory is approximated, and other factors like pedestrian motion, vegetation (isolated trees or forest) and traffic may contribute to reduce some of the discrepancies that can be observed between simulation and field
All of these limitations can explain the differences between simulated and measured data. Currently, the impact of vegetation (forest and/or isolated trees) models, pedestrian motion and traffic on the multipath signal can also be simulated and their performances are under evaluation.
ACKNOWLEDGMENTS
We thank Colin Ford and Ajay Vemuru from Spirent Communications and Antoine Boudet, Yann Dupuy, Arnold Duquesne and Paul Pitot from OKTAL Synthetic Environment.
MANUFACTURERS
The system described in this article consists of a Spirent GNSS simulator equipped with a SimGEN software suite and the SE-NAV simulator developed by OKTAL Synthetic Environment. SE-NAV is interfaced with SimGEN via the SimREMOTE protocol, a real-time control and motion API.
Tommaso Panicciari obtained a Ph.D. in telecommunications from the University of Bath (UK). He is a software/project engineer at Spirent Communications where his main activity focuses on spoofing and multipath simulation.
Mohamed Ali Soliman is completing a master’s degree in telecommunications with business at University College London. He is a product manager at Spirent Communications, managing multiple products including the multipath simulation offering.
Grégory Moura graduated from the French Institute of Aeronautics and Space with an M.S. in cosmology from Université de Toulouse. He manages the GNSS activities of the French company OKTAL Synthetic Environment.
Hemisphere GNSS has released the new single-frequency, multi-GNSS Vector V123 and V133 all-in-one smart antennas with integrated Atlas L-band designed for professional and commercial marine applications.
The company made the announcement at the Oceanology International conference being held this week in London, U.K.
Powered by Hemisphere’s Crescent Vector technology, the new V123 and V133 are multi-GNSS compass systems using GPS, GLONASS, BeiDou, Galileo and QZSS for simultaneous satellite tracking to offer heading, position, heave, pitch and roll. Both antennas support NMEA 0183 and NMEA 2000.
The V123 and V133 thrive in radar/ARPA, AIS, ECDIS, side-scan survey, multi- and single-beam surveys, dredging and general navigation applications.
The V123 and V133 rugged smart antennas combine Hemisphere’s recently announced Crescent Vector H220 OEM board and two superior multipath- and noise-rejecting antennas (spaced 50 centimeters apart) in a single enclosure.
The smart antennas require only a single power/data cable connection for fast and reliable installations, even in the presence of strong radio transmissions. Both Vector models provide 0.3-degree heading accuracy and sub-meter DGPS accuracy, as well as optional 0.5-meter Atlas L-band accuracy.
The V133 includes all the features of the V123 and adds the capability of receiving differentially corrected data from land-based beacon stations. Ease of installation and no maintenance or servicing enhances the simplicity of these new Vector models.
“The Vector V123 and V133 GNSS compasses represent significant enhancements to our industry leading models they replace, providing even greater performance, improved robustness and excellent value,” said Miles Ware, director of marketing at Hemisphere GNSS. “Users now have an even higher performing all-in-one Vector for their commercial and professional needs with the addition of BeiDou, Galileo, and QZSS as well as Atlas L-band corrections.”
Hemisphere GNSS has introduced the Vector V1000 GNSS receiver for precision marine applications. The V1000 provides high-accuracy heading, position, pitch, roll and heave data.
The company made the announcement at the Oceanology International conference being held this week in London, U.K.
The V1000 supports multi-frequency GPS, GLONASS, BeiDou, Galileo, QZSS and IRNSS (with future firmware upgrade and activation) for simultaneous satellite tracking. The receiver is powered by Hemisphere’s Athena real-time kinematic (RTK) engine and is Atlas L-band capable.
The new V1000 is designed for professional marine applications, such as hydrographic and bathymetric surveys, dredging, oil platform positioning, buoys and other applications that demand the highest level 3D positioning accuracies. Based on Hemisphere’s Eclipse Vector technology, the V1000 uses the most accurate differential corrections including RTK and Atlas L-band.
The V1000 is Hemisphere’s flagship receiver, with an integrated display, that can be conveniently installed near the operator. The two antennas can be installed at user-specified separation, providing valuable flexibility in terms of install locations and desired heading accuracy.
The V1000 has heading accuracy of better than 0.01 degree when using a 10-meter antenna separation. With CAN, serial, Bluetooth, Wi-Fi and Ethernet support and flexible installation, the all-new rugged enclosure gives the V1000 the advantage of working reliably in harsh environments, the company said.
Taoglas, a provider of IoT and automotive antenna and RF solutions, has introduced its patent-pending Terrablast range of antennas.
The Taoglas Terrablast antenna line is designed for UAVs and transportation. (Photo: Taoglas)
The polymer-based patch antennas are 30 percent lighter than their ceramic counterparts and extremely resistant to fracture upon impact. Terrablast antennas are designed for the automotive and unmanned aerial vehicle (UAV) markets, where impacts are possible but antenna performance cannot be compromised.
Unlike traditional patch antennas, which are ceramic, Terrablast uses a new class of Taoglas polymer dielectric material composed of glass-reinforced epoxy laminate. The addition of the polymer to the blend makes the antenna extremely lightweight, yet impact resistant, the company said.
The Terrablast antennas are designed to withstand drops, falls and impacts, and are designed for applications such as UAVs, where the antenna’s mechanical robustness following potential impact is critical.
The Terrablast patch antennas are also typically 30-35 percent lighter than traditional patches. In drone applications, where weight over battery life is critical — each gram reduced enhances battery life.
“Taoglas is leading the charge in material science advancement for the antenna industry, and our new Terrablast antennas are the latest innovation we’re introducing to the market,” said Ronan Quinlan, co-CEO and co-founder of Taoglas. “A variety of industries and applications, especially the automotive and drone markets, will benefit from Terrablast’s high-performance capabilities in a lightweight, impact-resistant form factor.”
The first antennas in the Terrablast range are a 25-mm embedded 2.4 GHz patch antenna and a 35-mm embedded GPS patch antenna. The circular polarized design of the 2.4-GHz patch ensures maximum performance for constantly moving mobile applications where the orientation to the transmitter or receiver frequently changes. The antenna weighs 5.6 grams compared to an equivalent ceramic patch of 8.5 grams, providing a weight-saving substitute for ceramic patches in UAV applications.
The 35-mm GPS/GLONASS/BeiDou patch antenna has extremely high efficiency of more than 70 percent across all bands, improving time to first fix. At 10 grams, the 3.5-mm-thick patch is 5.5 grams lighter than typical ceramic GNSS patches.
All Terrablast antennas undergo rigorous temperature, vibration and impact tests, exceed the highest ISO 16750 standards, and are manufactured in Taoglas’ purpose-built facilities in Taiwan and the United States.
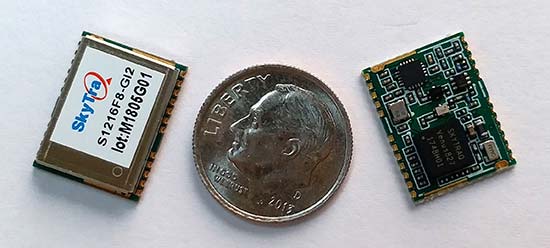
SkyTraq Technology Inc., a fabless GNSS positioning technology company, has introduced the S1216F8-GI2, a NavIC + GPS/GAGAN receiver module for the emerging Indian market.
It integrates L1/L5 RF front-end and baseband processor capable of receiving up to 14 L5 NavIC signals and up to 20 L1 GPS/GAGAN signals simultaneously. With currently usable six NavIC signals and three GAGAN signals, it offers a total of 18-23 usable signals for navigation compared to 9-14 usable signals with conventional GPS receivers, providing improved accuracy in urban canyon environments with signals often blocked by high buildings.
The S1216F8-GI2 has form-factor and pin-out compatability with popular 12 x 16-millimeter GPS receiver modules, so customers using those GPS modules can effortlessly migrate to NavIC/GPS capability by drop-in replacement and changing to an L1/L5 antenna.
For emerging intelligent transport systems (ITS) applications requiring NavIC/GPS capability in India, S1216F8-GI2 enables fast time-to-market for product manufacturers, the company said.
NavIC sub-frame data output is a useful feature of the S1216F8-GI2. It can output NavIC broadcast warning messages related to weather alerts, forecast, and natural disasters such as cyclones, earthquakes and tsunamis.
An S1216F8-GI2 engineering sample, evaluation kit and datasheet is available. Volume delivery to customers begins in late March. The S1216F8-GI2 is manufactured with ISO/TS 16949 automotive certification.
NovAtel has integrated its high-precision positioning engine and correction services with automotive-grade multi-frequency GNSS chipsets from STMicroelectronics: specifically, the Teseo APP (Automotive Precise Positioning) and Teseo V.
The integration demonstrates possibilities for vehicle localization solutions. NovAtel is part of Hexagon’s Positioning Intelligence Division.
STMicroelectronics’s Teseo APP and Teseo V provide multi-frequency GNSS data for PPP (precise point positioning) and RTK (real-time kinematic) for accurate positioning capabilities.
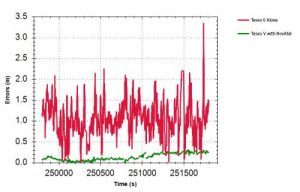
The Teseo V SBAS and Teseo V NovAtel PPP tests took place in a light urban environment. (Image: NovAtel)
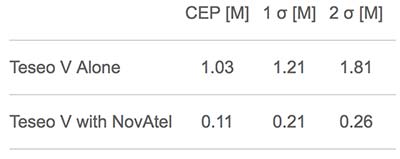
NovAtel’s positioning engine combines the GNSS measurements from these chipsets with inertial measurement unit (IMU) data and Hexagon PPP correction services on the demonstration platform to deliver centimeter-level PPP positioning solutions in real time.
“Working closely with STMicroelectronics using their Teseo APP chipset allowed us to innovate and speed up the development of our assured positioning solution tailored specifically for safe positioning of autonomous vehicles,” said Jonathan Auld, VP Engineering and Safety Critical Systems from NovAtel.
NovAtel’s positioning engine architecture enables a flexible integration with different GNSS receiver chipsets, IMUs and processor environments, providing automotive manufacturers with additional flexibility when it comes to selecting components and subsystems of advanced driver assistance systems (ADAS) and autonomous driving solutions.
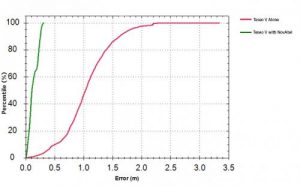
Test results: Horizontal position errors. Teseo V alone is shown in red, Teseo V + NovAtel in green. Test results: Horizontal cumulative error distribution. Teseo V alone is shown in red, Teseo V + NovAtel in green. (Chart: NovAtel)
Test results: Horizontal cumulative error distribution. Teseo V alone is shown in red, Teseo V + NovAtel in green. (Chart: NovAtel)
The positioning engine is being developed to ASIL-B standards according to ISO26262 and will include a proprietary GNSS integrity solution to ensure safe positioning within defined protection limits that are tailored to the customer’s application requirements.
“NovAtel’s choice of the automotive-quality ASIL-capable Teseo APP to integrate with their GNSS positioning engine is enabling them to develop a world-class safety-critical positioning offering to the automotive industry,” said Antonio Radaelli, Director, Infotainment Business Unit, STMicroelectronics.
NovAtel technology continues to be an integral part of the connected and autonomous car ecosystems, including academic research, industry development and real-life applications. The company’s automotive positioning solution includes automotive GNSS antenna technology, GNSS/INS positioning engine, and global correction services.