Applanix has introduced an expanded portfolio of marine georeferencing and motion compensation solutions. Taking advantage of Applanix proprietary technology, the new line-up of marine products offers high-performance solutions to a broader cross-section of the hydrographic survey industry.
All Applanix Marine products benefit from the optimal integration of GNSS and inertial observables, with access to Trimble GNSS technology for performance advantages.
The Applanix POS MV Surfmaster.
The announcement was made at Ocean Business 2015, an exhibition of more than 300 of the world’s leading manufacturers and service providers in the industry.
“Advances in Applanix inertial technology enable us to offer the high performance levels we are known for at even more attractive price points. By introducing this new product portfolio, we are able to deliver solutions suited to all types of bathymetric mapping,” said Peter Stewart, director of Marine Products. “This revised product lineup demonstrates Applanix’ continued commitment to provide customers with options that best fit their budget and requirements.”
At the entry level of the expanded product portfolio, Applanix introduced the new POS MV SurfMaster. Incorporating Applanix’s proprietary SmartCal inertial calibration techniques, POS MV SurfMaster delivers robust georeferencing for small platforms, both manned and unmanned. SurfMaster is fully supported by Applanix’ post-processing software POSPac MMS, and can deliver roll and pitch accuracy to 0.03 degrees, regardless of latitude or rate of vessel motion.
Applanix’ new marine product lineup also includes POS MV WaveMaster II and POS MV OceanMaster. Using newly developed inertial technology, POS MV WaveMaster II delivers performance equal to the well-established and proven WaveMaster E, but at a new lower price point. POS MV OceanMaster replaces the POS MV 320 E as the georeferencing and motion compensation solution of choice for the hydrographic professional, integrating next generation inertial sensors, which enable performance and pricing previously unavailable with this class of technology. POS MV OceanMaster provides reliable and robust surveying in even the most demanding sea conditions. POS MV Elite remains the ultimate option for users seeking the highest level of performance available to the industry.
The new POS MV SurfMaster, POS MV WaveMaster II and the POS MV OceanMaster are available now worldwide through the Applanix sales channel.
Hemisphere GNSS is offering a new RTK-enabled Vector V320 GNSS compass. The Vector V320 smart antenna supports multi-frequency GPS, GLONASS, Galileo (future firmware upgrade required) and BeiDou, and Hemisphere GNSS says it’s “the first of its kind.”
Designed for the professional marine and marine survey markets, the Vector V320 is the a multi-frequency, multi-GNSS, all-in-one smart antenna capable of both RTK-level positioning accuracy and better than 0.2-degree heading accuracy in a simple-to-install package.
“The Vector V320 combines our expertise in GNSS and smart antenna design,” said Lyle Geck, senior manager, Product Marketing, at Hemisphere GNSS. “With RTK performance that competes with current industry leaders, extremely accurate accelerometer-aided GNSS heading, and the simplicity of install offered by the smart antenna design, it is an incredible product.”
The Vector V320 is the latest in a line of GPS/GNSS compasses, including the multi-frequency, multi-GNSS Vector VS330 receiver as well as the Vector V102, Vector V103 and Vector V104 compass smart antennas.
“There has been a void in the market. Our customers have been looking for a product that provides RTK accuracy together with precision heading in an easy-to-install package,” said Andy Smith, managing director of Saderet Ltd. “The Vector V320 delivers.”
The Vector V320 GNSS compass is being featured by Hemisphere GNSS at Ocean Business in Southampton, UK, April 14-16, at stand K12.
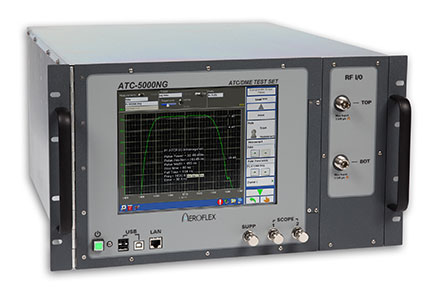
Cobham AvComm, formerly the Aeroflex AvComm business unit, has introduced the ATC-5000NG NextGen ATC/DME Test Set.
Designed for engineering development, design validation, manufacturing and return-to-service test applications, the ATC-5000NG is the replacement product for the legacy SDX-2000 and the ATC-1400A/S-1403DL. The software defined radio architecture supports more transponder RTCA DO-181E test capability than the legacy products did and has new capability needed to support the Federal Aviation Administration’s NextGen test requirements including ADS-B (RTCA DO-260B) and UAT (RTCA DO-282).
ADS-B is the Automatic Dependent Surveillance-Broadcast for next-generation (NextGen) aircraft navigation. The FAA has mandated that aircraft operating in airspace that now requires a Mode C transponder must be equipped with ADS-B Out by Jan. 1, 2020.
“We are excited to introduce the new ATC-5000NG which offers our customers the most comprehensive test set available in the market today. This will help our customers prepare for new requirements driven by the FAA’s NextGen and Europe’s SESAR projects,” said Ryan Panos, vice president and general manager of Cobham AvComm.
In September 2014, Cobham completed its acquisition of Aeroflex for $1.46 billion.
TU-Automotive has announced finalists in several categories for its 2015 awards. Finalists in the Best Connected Car System Integrator category include chipmakers Qualcomm and u-blox, among others. Nominees in other categories include TomTom, NXP Semiconductors, Telogis and Geotab.
The finalists represent excellence, innovation and leadership in the connected car industry, TU-Automotive said.
More than 400 entries were submitted. The winners will be revealed at the TU-Automotive Awards Ceremony on June 2 in Detroit. Here is the full list of finalists:
Car Maker of the Year 2015
Audi
BMW of North America, LLC
Ford Motor Company
Qoros auto
Toyota Motor Sales
Volvo Car Group
Commercial Vehicle Maker of the Year
Mack Trucks
Scania CV AB
Volvo AB
Telematics Service Provider of the Year
Airbiquity
Ericsson
General Motors
Jasper
Nuance Communications, Inc.
Total Traffic and Weather Network
Xtime
Commercial Telematics Service Provider of the Year
Inthinc Technology Solutions Inc.
Openmatics
Teletrac Inc
Telogis
Best Connected Car System Integrator
Atos
AutonomouStuff LLC
HERE, a Nokia company
Car Connectivity Consortium
Covisint
Dash Labs
Elektrobit (EB) Automotive
Luxoft
Movimento
Parkopedia
Qualcomm Technologies, Inc.
Symphony Teleca Corp.
u-blox AG
Uievolution, Inc.
Best Commercial Vehicle System Integrator
Eyeris
Geotab
KPIT Technologies Ltd.
Navistar
Spireon, Inc.
Symphony Teleca Corp.
TomTom Telematics
Best Insurance Telematics Product
Allstate Insurance Company
AXA & MyDrive Solution
Codan Insurance (RSA) & The Floow
Direct Auto Insurance & DriveFactor
Industrielle Alliance, Assurance auto et habitation inc. & Baseline Telematics
Progressive Insurance & zubie inc
RightTrack® by Liberty Mutual & Octo Telematics North America
Suncorp Group & Wunelli, a LexisNexis Company
Best Telematics Product or Launch in an Emerging Market
CarIQ Technologies Private Limited.
Discovery Insure
iTrans Technologies Pvt Ltd
Omnicomm
Qoros Auto
TATA Motors Ltd, India
TechMahindra
TOWER Insurance (in partnership w/ DriveFactor Inc.)
Best Safety or ADAS Solution
Argus Cyber Security
BrightWay Vision
Delphi Automotive PLC
Elektrobit (EB) Automotive
Eyeris
General Motors
NXP Semiconductors
TomTom
Valeo Wiper Systems
Best Mobility Solution Industry Newcomer
Carma
County of Santa Clara Roads & Airports Department
Dash Labs
Hyundai Blue Link Smartwatch app
Local Motion
moovel GmbH
parku – The Parking App
QNX Software Systems
Industry Newcomer
ATG Risk Solutions
CarKnow LLC
CloudCar
Dealer-FX
Eyeris
gestigon
MobiWize
Nebula Systems Ltd
Rivet Radio, Inc.
TowerSec
TU-Automotive Influencer of the Year
Andrew Poliak, Global Director Business Development – Automotive, QNX Software Systems
Septentrio has launched its next-generation dual-antenna GNSS receiver, the AsteRx 4 OEM. The AsteRx 4 OEM is a multi-frequency, dual antenna receiver that incorporates the latest innovative GNSS tracking and positioning algorithms from Septentrio. It offers users in the marine, machine control and agricultural industries precision, accuracy, reliability and ease of use, the company said.
Thanks to Septentrio’s positioning engine, which uses advanced multipath and ionosphere modeling algorithms, the AsteRx4 offers robust positioning scalable from meter to centimeter accuracy. Together with precise heading and reliable error estimates, the AsteRx 4 OEM functions in tough conditions on land, at sea or in the air.
Use of all available constellations (GPS, GLONASS, BeiDou, Galileo) provide the operator with a reliable solution even in obstructed areas such as in narrow city streets or at the corners of large structures, Septentrio said. The AsteRx4 OEM features the full range of positioning techniques from stand-alone to real-time kinematic (RTK).
For users who operate in more remote regions of the globe, the AsteRx4 OEM supports Veripos and Terrastar correction PPP services. Furthermore, the receiver features special interference mitigation technology which filters out ambient intentional and unintentional RF interference.
The AsteRx4 OEM is straightforward to set up and integrate with existing systems, Septentrio said. It has the similar hardware interface as earlier AsteRx receivers, and supports the same open and well documented command and binary output format. Users will be able to operate their receiver without special configuration software by using the very accessible web interface, which is available via network and USB connections.
“AsteRx4 incorporates many powerful improvements based on practical difficulties our customers face in the field every day,” said Jan Van Hees, vice president of Business Development, Septentrio. “We are particularly proud of the solutions for interference robustness that we have incorporated into our new ASIC, the GReCo4; the solid and reliable positioning algorithms that result from taking the receivers into the most extreme environments and from focusing not only on accuracy, but on reliability of the position solution.”
The AsteRx4, along with all the AsteRx family of receivers, will be on display at booth W40 for the duration of Ocean Business 2015 starting April 14 at the National Oceanography Centre, Southampton, UK.
In the latest update of its Motion Tracker product portfolio, Xsens has added active heading stabilization (AHS) to its core sensor fusion algorithms on the MTi 10-series and MTi 100-series. Both series are MEMS-based inertial measurement units (IMU), attitude and heading reference systems (AHRS), and vertical reference units (VRUs).
The AHS algorithm delivers fundamentally improved heading tracking accuracy, Xsens said. The improved robustness in heading tracking is particularly evident in Xsens’ line of vertical reference units (MTi-20 and MTi-200). These products now provide actively stabilized heading tracking, delivering 20x less drift than pure gyroscope dead reckoning for most application scenarios. This means heading tracking drift as low as 1 degree after one hour for many applications, while remaining fully immune to magnetic distortions.
Xsens said this characteristic makes the MTi line of products a highly accurate, but cost-effective solution for robotic/indoor navigation, camera stabilization, satellite communication, directional drilling, borehole/pipeline inspection and pedestrian navigation applications, Xsens said.
“Customers are already choosing our MTis because of their accurate heading tracking capabilities, but this algorithm will bring the accuracy to a whole new level, enabling more applications and creating new markets. The 12 cm2 MTi comes with an easy-to-use library, so that integrating the solution is straight-forward,” said Marcel van Hak, Product Manager of Industrial Applications for Xsens.
AHS is available immediately as a free firmware upgrade to all MTi customers as part of the just-released MT Software Suite 4.3.
The following video shows a demonstration of the Active Heading Stabilization, with the Xsens MTi is mounted on a robotic vacuum cleaner.
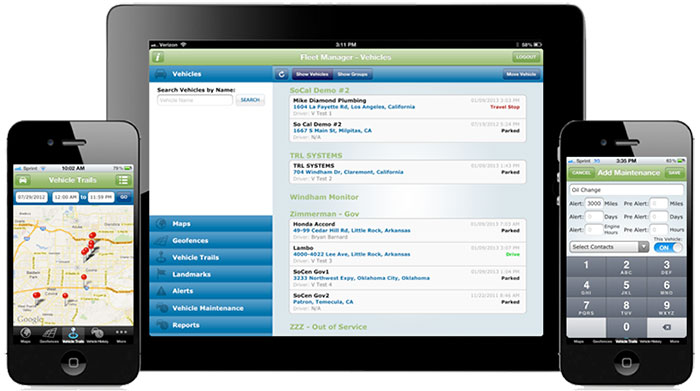
GPSTrackIt.com has added the ability to allow vehicles in Fleet Manager, its fleet and mobile workforce management system, to simultaneously belong to multiple groups. The feature enables groups to be “nested,” expanding the reporting and alerting capabilities of Fleet Manager.
“A vehicle belonging to more than a single group now appears in the list for each group selected,” said Eddie Bermudez, GPSTrackIt.com’s product development manager. “Units in two groups will appear twice, once in each group.”
Vehicle membership in multiple groups can be seen in the following changes to Fleet Manager:
The Vehicle Status page has been augmented with a selection/filter list for groups.
On the Map page, the information bubble for the unit displays all group tags.
The Analytics Dashboard can now compare two groups containing the same unit.
Scheduled Reports can be run using multiple groups.
“This enables the creation of ‘nested’ or vehicle sub-groups,” Bermudez said. “Say there are sales teams at local offices. Each office has a ‘sales team’ vehicle group. But the regional sales manager is responsible for five locations, so the vehicles are also in the ‘regional sales team’ group.”
Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and multipath in their performance to GPS L1 and L5. Raw noise and multipath level of the Galileo signals is shown to be smaller than those of GPS. Even after smoothing, Galileo signals perform somewhat better than GPS and are less sensitive to the smoothing time constant.
By Mihaela-Simona Circiu, Michael Felux, German Aerospace Center (DLR), and Sam Pullen, Stanford University
Several ground-based augmentation system (GBAS) stations have become operational in recent years and are used on a regular basis for approach guidance. These include airports at Sydney, Malaga, Frankfurt and Zurich. These stations are so-called GBAS Approach Service Type C (GAST C) stations and support approaches only under CAT-I weather conditions; that is, with a certain minimum visibility. Standards for stations supporting CAT-II/III operations (low visibility or automatic landing, called GAST D), are expected to be agreed upon by the International Civil Aviation Organization (ICAO) later this year. Stations could be commercially available as soon as 2018.
However, for both GAST C and D, the availability of the GBAS approach service can be significantly reduced under active ionospheric conditions. One potential solution is the use of two frequencies and multiple constellations in order to be able to correct for ionospheric impacts, detect and remove any compromised satellites, and improve the overall satellite geometry (and thus the availability) of the system.
A new multi-frequency and multi-constellation (MFMC) GBAS will have different potential error sources and failure modes that have to be considered and bounded. Thus, all performance and integrity assumptions of the existing single-frequency GBAS must be carefully reviewed before they can be applied to an MFMC system. A central element for ensuring the integrity of the estimated position solution is the calculation of protection levels. This is done by modeling all disturbances to the navigation signals in a conservative way and then estimating a bound on the resulting positioning errors that is valid at an allocated integrity risk probability.
One of the parameters that is different for the new signals and must be recharacterized is the residual uncertainty attributed to the corrections from the ground system (σpr_gnd). A method to assess the contribution of residual noise and multipath is by evaluating the B-values in GBAS, which give an estimate of the error contribution from a single reference receiver to a broadcast correction. Independent data samples over at least one day (for GPS) are collected and sorted by elevation angle. Then the mean and standard deviations for each elevation bin are determined.
Here, we evaluate the E1 and E5a signals broadcast by the operational Galileo satellites now in orbit. In the same manner as we did for GPS L5 in earlier research, we determine the σpr_gnd values for these Galileo signals. As for GPS L5, results show a lower level of noise and multipath in unsmoothed pseudorange measurements compared to GPS L1 C/A code.
DLR GBAS Facility
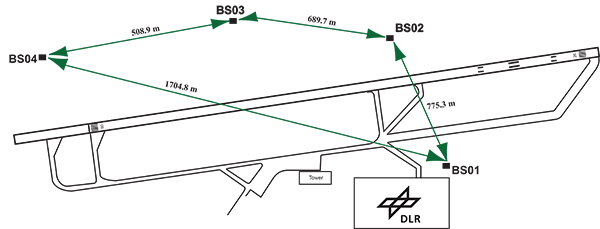
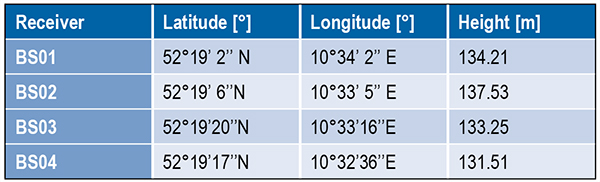
DLR has set up a GBAS prototype at the research airport in Braunschweig (ICAO identifier EDVE) near the DLR research facility there. This ground station has recently been updated and now consists of four GNSS receivers connected to choke ring antennas, which are mounted at heights between 2.5 meters and 7.5 meters above equipment shelters. All four receivers are capable of tracking GPS L5 (in addition to GPS L1 and L2 semi-codeless) and Galileo E1 and E5a signals. Figure 1 gives an overview of the current ground station layout, and Table 1 gives the coordinates of the antennas.
Figure 1. DLR ground facility near Braunschweig Airport, also shown in opening photo at left.Table 1. Ground receiver antenna coordinates.
Smoothing Techniques
The GBAS system corrects for the combined effects of multiple sources of measurement errors that are highly correlated between reference receivers and users, such as satellite clock, ephemeris error, ionospheric delay error, and tropospheric delay error, through the differential corrections broadcast by the GBAS ground subsystem. However, uncorrelated errors such as multipath and receiver noise can make a significant contribution to the remaining differential error. Multipath errors are introduced by the satellite signal reaching the antenna via both the direct path from the satellites and from other paths due to reflection. These errors affect both the ground and the airborne receivers, but are different at each and do not cancel out when differential corrections are applied.
To reduce these errors, GBAS performs carrier smoothing. Smoothing makes use of the less noisy but ambiguous carrier-phase measurements to suppress the noise and multipath from the noisy but unambiguous code measurements.
The current GBAS architecture is based on single-frequency GPS L1 C/A code measurements only. Single-frequency carrier smoothing reduces noise and multipath, but ionospheric disturbances can cause significant differential errors when the ground station and the airborne user are affected by different conditions. With the new available satellites (GPS Block IIF and Galileo) broadcasting in an additional aeronautical band (L5 / E5), this second frequency could be used in GBAS to overcome many current limitations of the single-frequency system.
Dual-frequency techniques have been investigated in previous work. Two dual-frequency smoothing algorithms, Divergence Free (Dfree) and Ionosphere Free (Ifree), have been proposed to mitigate the effect of ionosphere gradients.
The Dfree output removes the temporal ionospheric gradient that affects the single-frequency filter but is still affected by the absolute difference in delay created by spatial gradients. The main advantage of Dfree is that the output noise is similar to that of single-frequency smoothing, since only one single-frequency code measurement is used as the code input (recall that carrier phase noise on both frequencies is small and can be neglected).
Ifree smoothing completely removes the (first-order) effects of ionospheric delay by using ionosphere-free combinations of code and phase measurements from two frequencies as inputs to the smoothing filter. Unlike the Dfree, the Ifree outputs contain the combination of errors from two code measurements. This increases the standard deviation of the differential pseudorange error and thus also of the position solution.
Noise and Multipath in New GNSS Signals
GBAS users compute nominal protection levels (H0) under a fault-free assumption. These protection levels are conservative overbounds of the maximum position error after application of the differential corrections broadcast by the ground system, assuming that no faults or anomalies affect the position solution. In order to compute these error bounds, the total standard deviation of each differentially corrected pseudorange measurements has to be modeled. The standard deviation of the residual uncertainty (σn, for the nth satellite) consists of the root-sum-square of uncertainties introduced by atmospheric effects (ionosphere, troposphere) as well as of the contribution of the ground multipath and noise. In other words, these error components are combined to estimate σn2 as described in the following equation:
(1)
The ground broadcasts a value for σpr_gnd (described later in the section) associated with the pseudorange correction for each satellite. These broadcast values are based on combinations of theoretical models and actual measurements collected from the ground receivers that represent actual system characteristics. Unlike the ground, σpr_air is computed based entirely on a standardized error model. This is mainly to avoid the evaluation of multipath for each receiver and each aircraft during equipment approval.
In addition to the characteristics of nearby signal reflectors, multipath errors are mainly dependent on signal modulation and other signal characteristics (for example, power, chip rate). In earlier research, we showed that the newly available L5 signals broadcast by the GPS Block IIF satellites show better performance in terms of lower noise and multipath. This mainly results from an increased transmitted power and a 10 times higher chip rate on L5 compared to the L1 C/A code signal.
In this work, we extend this evaluation to the new Galileo signals and investigate their impact on a future multi-frequency, multi-constellation GBAS. Characterization of these new signals is based on ground subsystem measurements, since no flight data with GPS L5 or Galileo measurements are available at the moment. We assume that the improvements observed by ground receivers are also applicable to airborne measurements. This assumption will be validated as soon as flight data are available.
The measurements used were collected from the DLR GBAS test bed over 10 days (note that Galileo satellite ground track repeatability is 10 sidereal days) between the December 14 and 23, 2013. In that period, four Galileo and four Block IIF GPS satellites were operational and broadcast signals on both aeronautical bands E1 / L1 and E5a / L5.
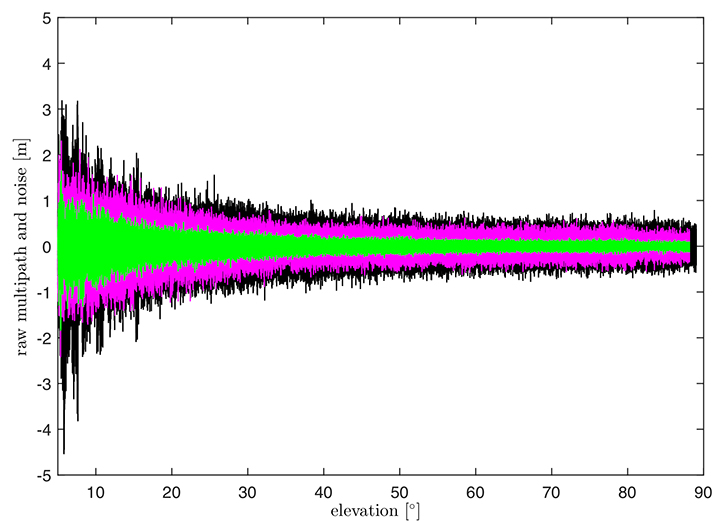
In Figure 2, the suppression of multipath and noise on the Galileo signals can be observed, where the code multipath and noise versus elevation for GPS L1 C/A BSPK(1), Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals are shown. The code multipath and noise was estimated using the linear dual-frequency combination described in equation (2), where MPi represents the code multipath and noise on frequency i, ρi the code measurement, and ϕi,and ϕj represent the carrier-phase measurements on frequencies i and j, respectively. Carrier phase noises are small and can be neglected.
(2)
Figure 2. Raw multipath function of elevation for GPS L1, Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals.
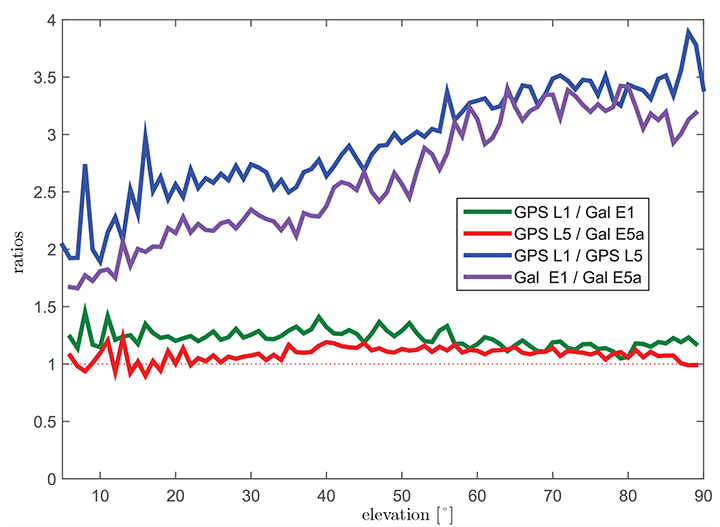
The multipath on the Galileo E1 (BOC(1,1)) signal (the magenta curve) is lower than the GPS L1 C/A (BPSK(1))(black curve), especially for low elevation, where the advantage of the E1 BOC(1,1) is more pronounced. The lower values can be explained by the wider transmission bandwidth on E1 and the structure of the BOC signal. Galileo E5a (green data in Figure 2) again shows a better performance than Galileo E1. This was expected due to the higher chip rate and higher signal power. A comparison of the raw multipath and noise standard deviations for GPS L1, L5 and Galileo E1, E5a signals is presented in Figure 3.
Figure 3. Ratios of the multipath and noise standard deviation function of elevation.
The curves there show the ratios of the standard deviations for each elevation bin. The values for GPS L1 are almost 1.5 times larger than those for Galileo E1 BOC(1,1) (green curve) for elevations below 20°. For high elevations, the ratio approaches 1.0. This corresponds to the observations in the raw multipath plot ( Figure 2). With the same signal modulation and the same chip rate, E5a and L5 have very similar results (red curve), and the ratio stays close to 1.0 for all elevations.
The blue and the purple curves in Figure 3 show the ratio of GPS L1 C/A (BPSK(1)) and GPS L5 (BPSK(10)), and Galileo E1 (BOC(1,1)) and Galileo E5a (BPSK(10)), respectively. The ratio of GPS L1 to GPS L5 (blue curve) increases with elevation from values around 2.5 for low elevations, reaching values above 3.5 for elevations higher than 60°. As Galileo E1 performs better, the ratio between Galileo E1 and Galileo E5a (purple curve) is smaller, from a value of 1.5 for elevations below 10 degrees to a value of 3.0 for high elevations.
Until now, we have presented the evaluation of raw code noise and multipath. However, in GBAS, carrier smoothing is performed to minimize the effect of code noise and multipath. The value that describes the noise introduced by the ground station is represented by a standard deviation called σpr_gnd and is computed based on the smoothed pseudoranges from the reference receivers. In the following section, we focus on the evaluation of σpr_gnd using different signals and different smoothing time constants. Note that, in this study, σpr_gnd contains only smoothed multipath and noise; no other contributions (for example, inflation due to signal deformation or geometry screening) are considered.
B-values and σpr_gnd
B-values represent estimates of the associated noise and multipath with the pseudorange corrections provided from each receiver for each satellite, as described in Eurocae ED-114A and RTCA DO-253C. They are used to detect faulty measurements in the ground system. For each satellite-receiver pair B(i,j), they are computed as:
(3)
where PRCTX represents the candidate transmitted pseudorange correction for satellite i (computed as an average over all M(i) receivers), and PRCSCA(i,k) represents the correction for satellite i from receiver k after smoothed clock adjustment, which is the process of removing the individual receiver clock bias from each reference receiver and all other common errors from the corrections. The summation computes the average correction over all M(k) receivers except receiver j. This allows detection and exclusion of receiver j if it is faulty. If all B-values are below their thresholds, the candidate pseudorange correction PRCTX is approved and transmitted. If not, a series of measurement exclusions and PRC and B-value recalculations takes place until all revised B-values are below threshold. Note that, under nominal conditions using only single-frequency measurements, the B-values are mainly affected by code multipath and noise.
Under the assumption that multipath errors are uncorrelated across reference receivers, nominal B-values can be used to assess the accuracy of the ground system. The standard deviation of the uncertainty associated with the contribution of the corrections (σpr_gnd) for each receiver m is related to the standard deviation of the B-values by:
(4)
where M represents the number of the receivers and N represents the number of satellites used. The final sigma takes into account the contribution from all receivers and is computed as the root mean square of the standard deviation of the uncertainties associated with each receiver (Equation 4).
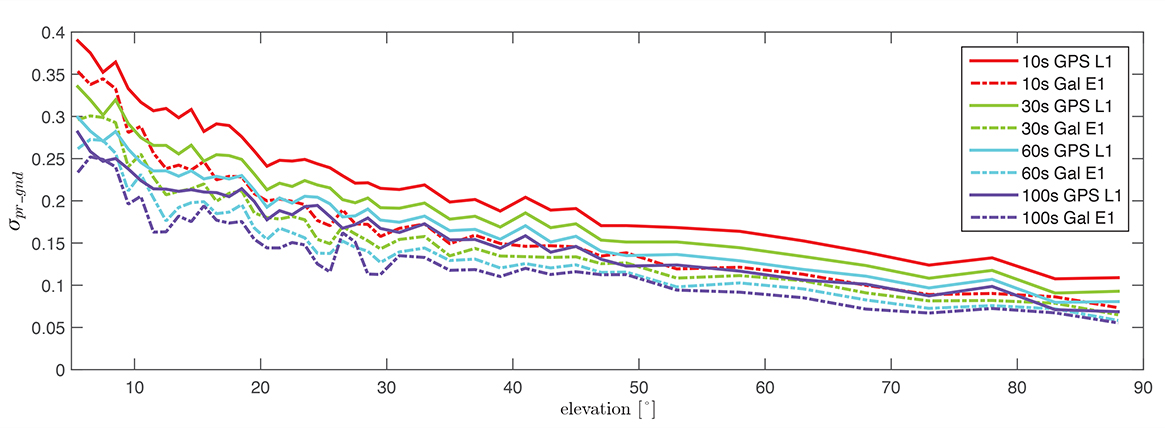
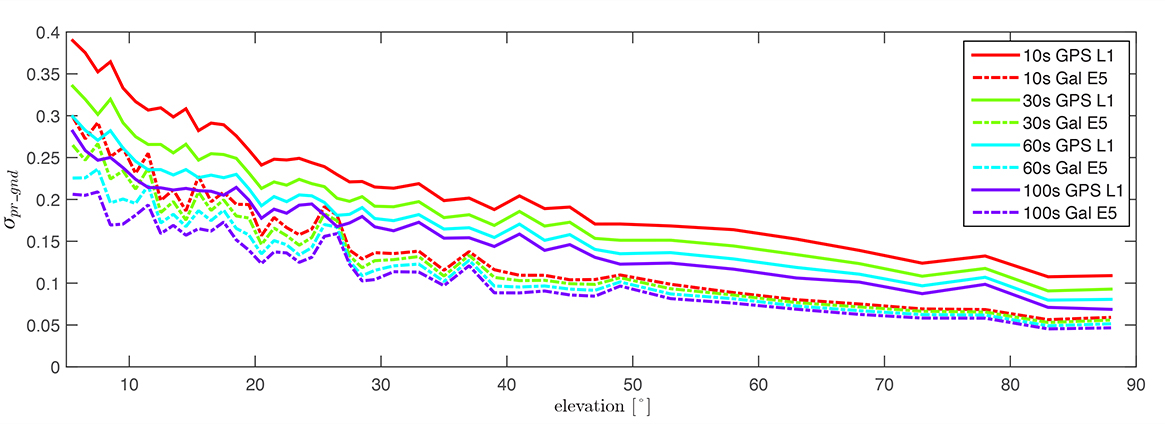
Figure 4 shows the evaluation of (σpr_gnd) for the Galileo E1, BOC(1,1) signal and the GPS L1 C/A signal for increasing smoothing time constants (10, 30, 60, and 100 seconds). Starting with a 10-second smoothing constant, Galileo E1 shows much better performance than GPS L1. The difference shrinks as the smoothing constant increases due to the effectiveness of smoothing in reducing noise and short-delay multipath. However, even with 100-second smoothing (the purple curves), Galileo E1 BOC(1,1) shows lower values of (σpr_gnd).
Figure 4. σ(pr_gnd) versus elevation for Galileo E1 (dotted lines) and GPS L1 (solid lines for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
A similar comparison is presented in Figure 5, of the performance of GPS L1 and Galileo E5a. The Galileo E5a signal is significantly less affected by multipath, and the difference stays more pronounced than in the Galileo E1 – GPS L1, even with 100-second smoothing. It can be also observed that the Galileo signals have a lower sensitivity to the smoothing constant. The Galileo E1 signal shows an increase of sensitivity for low elevations (below 40°), while on E5a, a smoothing constant larger than 10 seconds has almost no impact on the residual error. Thus, a shorter smoothing constant on Galileo E5a generates approximately the same residual noise and multipath a 100-second smoothing constant on GPS L1.
Figure 5. σ(pr_gnd) versus elevation for Galileo E5a (dotted lines) and GPS L1 (solid lines) for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
The values for (σpr_gnd) are, however, impacted by the number of satellites which are used to determine a correction. Since only a very limited number of satellites broadcasting L5 and Galileo signals are currently available, these results should be considered preliminary. The first evaluations strongly indicate that with the new signals, we get better ranging performance. Based on the performance advantage of the new signals, a decrease of the smoothing constant is one option for future application. This would reduce the time required (for smoothing to converge) before including a new satellite or re-including a satellite after it was lost.
In the current GAST-D implementation, based on GPS L1 only, guidance is developed based on a 30-second smoothing time constant. A second solution, one with 100 seconds of smoothing, is used for deriving the Dv and Dl parameters from the DSIGMA monitor and thus for protection level bounding (it is also used for guidance in GAST-C). During the flight, different flight maneuvers or the blockage by the airframe can lead to the loss of the satellite signal.
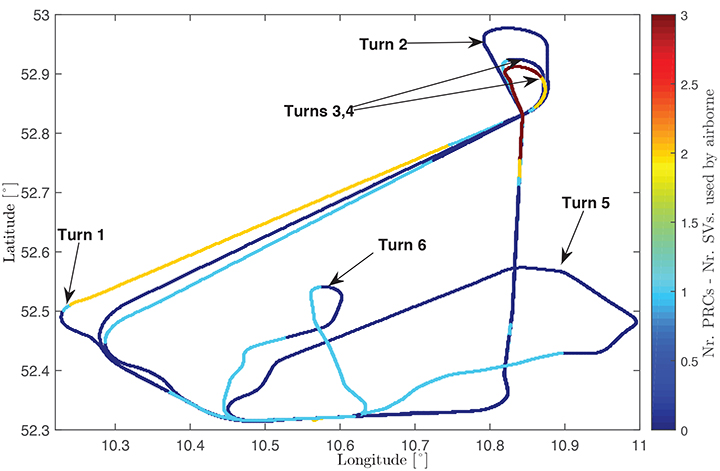
Figure 6 shows the ground track of a recent flight trial conducted by DLR in November 2014. The colors represent the difference between the number of satellites used by the ground subsystem (with available corrections) and the number of satellites used by the airborne subsystem in the GAST-D position solution. One of the purposes of the flight was to characterize the loss of satellite signals in turns. In turns with a steeper bank angle, up to 3 satellites are lost (Turns 1, 3, and 4), while on a wide turn with a small bank angle (Turn 2), no loss of satellite lock occurred. It is also possible for airframe to block satellite signals, leading to a different number of satellites between ground and airborne even without turns.
Figure 6. Ground track of a flight trial conducted by DLR. The colors represent difference between number of SVs used by the ground system and number of SVs used by the airborne.
With this in mind, a shorter smoothing constant would allow the satellites lost to turns or to airframe blockage to be re-included more rapidly in the position solution. However, a new smoothing constant would have to be validated with a larger amount of data. Data from flights trials has to be evaluated as well to confirm that similar levels of performance are reresentative of the air multipath and noise.
In a future dual-frequency GBAS implementation, an important advantage of lower multipath and noise is to improve the Ifree position solution. In earlier research, we demonstrated that the error level of the Dfree solution is almost the same as for single-frequency, but an increase in error by a factor of 2.33 was computed for the Ifree standard deviation based on L1 C/A code and L2 semi-codeless measurements.
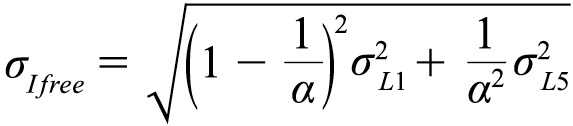
If the errors on L1 (E1) and L5 (E5a) code and carrier phase measurements are statistically independent the standard deviation of the σIfree can be written as,
(5)
where α=1−f 21 ∕ f 25, and σL1,σL5 represent the standard deviations of the smoothed noise and multipath for L1 (E1) and L5 (E5a), respectively. Considering σpr_gnd,L1(E1)) = σpr_gnd,L5(E5a)) in equation (5), the noise and multipath error on Ifree (σIfree) increases by a factor of 2.59.
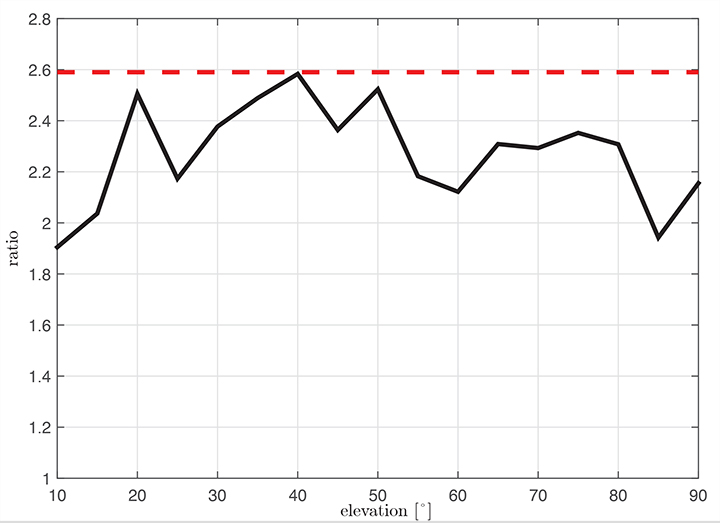
Figure 7 shows the ratio σIfree/σL1 using measured data. We observe that the measured ratio (the black curve) is below the theoretical ratio computed based on the assumption of statistically independent samples (the constant value of 2.59). This is explained by the fact that the multipath errors in the measurements are not independent but have some degree of statistical correlation. The standard deviations are computed based on the same data set used in the raw multipath and noise assessment using 100-second smoothed measurements sorted into elevation bins of 10° spacing.
Figure 7. Measured ratio σIfree/σL1 function of elevation.
Conclusion
We have shown how GBAS can benefit from the new signals provided by the latest generation of GPS and Galileo satellites. We have demonstrated improved performance in terms of lower noise and multipath in data collected in our GBAS test bed. When GBAS is extended to a multi-frequency and multi-constellation system, these improvements can be leveraged for improved availability and better robustness of GBAS against ionospheric and other disturbances.
Acknowledgment
Large portions of this work were conducted in the framework of the DLR internal project, GRETA.
Manufacturers
The ground facility consists of four JAVAD GNSS Delta receivers, all connected to Leica AR 25choke ring antennas.
Mihaela-Simona Circiu is is a research associate at the German Aerospace Center (DLR). Her research focuses on multi-frequency multi-constellation Ground Based Augmentation System. She obtained a 2nd level Specialized Master in Navigation and Related Applications from Politecnico di Torino.
MIchael Felux is is a research associate at the German Aerospace Center (DLR). He is coordinating research in the field of ground-based augmentation systems and pursuing a Ph.D. in Aerospace Engineering at the Technische Universität München.
Sam Pullen is a senior research engineer at Stanford University, where he is the director of the Local Area Augmentation System (LAAS) research effort. He has supported the FAA and others in developing GNSS system concepts, requirements, integrity algorithms, and performance models since obtaining his Ph.D. from Stanford in Aeronautics and Astronautics.
McMurdo Group, maker of end-to-end search and rescue solutions, has received formal certification from the U.S. Federal Aviation Administration (FAA) and European Aviation Safety Agency (EASA) for its Kannad Integra ARINC 429 Navigation Interface.
Based on the ARINC 429 GPS communications standard for most commercial aircraft, the interface, when used with the Kannad Integra Emergency Locator Transmitter (ELT), provides dual GPS redundancy that can result in aircraft being found much faster compared to standard ELTs in event of an emergency. The solution has already been selected by aircraft manufacturers including Pilatus, Embraer and Airbus Helicopters.
Traditional ELTs rely on an aircraft’s external antenna and GPS equipment, which is subject to failure in the event of an emergency. The Kannad Integra ELT, however, can operate independently of the aircraft to provide key positioning data through its built-in internal antenna and embedded GPS receiver. The Integra ARINC 429 navigation interface stores the latest known position of the aircraft based on the aircraft navigation system data. This data is then used by the built-in Integra GPS for better location accuracy and a higher chance of rescue.
The Kannad Integra ELT and Integra ARINC 429 Navigation Interface are suitable for commercial aircraft, helicopters, business jets and airlines. Once activated, the Integra ELT transmits a distress signal to alert international rescue services to the emergency location via the global Cospas-Sarsat Search and Rescue satellite system, which has helped to save more than 37,000 lives since 1982.
“McMurdo’s Kannad products have been chosen by the world’s leading aircraft manufacturers and airlines for their quality, reliability and innovation,” said Christian Belleux, head of McMurdo’s Kannad Aviation Business Unit. “This new ARINC 429 interface is yet another example of how we are helping to shape the present and the future of aviation safety.”
Avanti Communications has been appointed by the UK Space Agency to deliver a crucial air navigation project in Africa, SBAS-AFRICA. The satellite operator has been awarded the contract under the agency’s International Partnership Space Programme (IPSP), which exists to open up opportunities for the UK space sector to share expertise in real-world satellite technology and services overseas.
Africa has just 3 percent of global air traffic, and yet air accidents in Africa account for roughly 20 percent of the worldwide total. By demonstrating potential improvements in flight safety via SBAS technologies, the project can provide socio-economic benefits to the continent, according to a news release from Avanti.
Based on prior cost-benefit modeling which identified a €1.7 billion potential economic benefit to the African aviation sector from the deployment of SBAS services, SBAS-AFRICA will help accelerate the adoption of GNSS-based flight operations, positively influence the evolution of aviation safety in Africa and encourage development in the wider African economy.
SBAS-AFRICA will deliver a satellite-based augmentation system for GNSS-based operations in the aviation sector, serving significant parts of Africa in partnership with a number of local stakeholders. The project will use a unique asset, Avanti’s ARTEMIS L1 Navigation transponder, to provide a navigation data broadcast service.
“SBAS-AFRICA brings an innovative and pragmatic approach to deploying SBAS services in Africa,” said Matthew O’Connor, Chief Operating Officer at Avanti Communications. “It establishes crucial collaboration between the UK and a number of African countries, including South Africa and Ghana. Participating countries will benefit hugely from expertise gained, placing them at the forefront of navigation services across the continent and, crucially, helping to improve aviation safety for a major generator of economic benefit in Africa.”
He continued, “The Artemis satellite will play an integral role in this project. We expect that such a showcase for its performance, accuracy and quality will provide further evidence of what can be achieved with this technology and lead to significant commercial opportunities.”
“The UK Space Agency is delighted to play a role in fostering new international partnerships that not only enable innovative UK space companies like Avanti to provide more high-tech exports that can boost our space sector but also allow the UK to widely share the considerable social and economic benefits that space technology and infrastructure can provide,” said David Parker, chief executive of the UK Space Agency.
Sessions on indoor navigation and a keynote from Google at February’s International Navigation Conference (INC15), organised by the Royal Institute of Navigation, addressed the revised E911 positioning requirements in the United States, and flowed over into speculation about E112 emergency calling parameters in Europe’s near future.
According to the 2014 U.S. Federal Communications Commission report, 75 percent of 911 calls now come from mobile phones, more than half of those originate indoors, and around 1 percent of emergency calls contain no location information from the caller (due to distress, confusion, language issues, illness, and so on). The report estimates 10,000 deaths per year in the United States might have been avoided if a landline had been used instead, since location information for landlines can be provided confidently.
Discussion in the breaks of INC highlighted a misunderstanding amongst some parties that E911 mandates the use of GPS for position location determination. In fact,E911 does not mandate any specific technology; it specifies performance criteria in terms of accuracy that must be met. The recently revised performance criteria include indoor performance, and some of the technology discussed at the INC is able to meet these requirements without using GNSS at all.
This could be troublesome for Europe, which is looking at the imposition of Galileo as part of an A-GNSS technology push for the E112 application. The real problems, discussed during INC and in European consultation processes with safety of life services such as E112, are:
the accuracy of the position derived by the device and/or network, and
the timeliness of the delivery of that position to the Public Service Answering Point (PSAP).
The E911 directives address these points directly, and the infrastructure in the cellular networks is in place. Does simply implementing a Galileo capability into a European mobile device solve these problems?
In many outdoor cases, implementing Galileo can bring benefits, including signal diversity. And of course the E112 proposal is greater than just “adding Galileo.” It does address the second problem of timeliness of delivery and data transfer, but there are significant infrastructure upgrades required across Europe for the provision of this location data to the PSAPs.
What the E112 processes do not currently do is specify performance criteria for the position location accuracy. This means that the position estimate provided under E112 is likely to be a cell-ID fix, with an accuracy ranging from hundreds of meters to dozens of kilometers.
Galileo on Mobiles. Further discussion during the conference delved into the realms of the specifics of implementing A-GNSS, including Galileo, onto a mobile device. Conversations centered around if any future E911 or E112 positioning capability would be aligned around a single-chip solution as generally currently deployed on a device, or if some of the functions will be moved up the stack into the operating system (OS) of the device, into software.
Most opinions were against this latter concept, and a panel at the ION GNSS+ last year in Florida concluded the same thing. However, questions were asked about some ideas relating to identifying the emergency number at the time of dialing and then starting the position location determination functions in readiness for the need to provide the device location. This addresses the first bullet point earlier, the accuracy of the position derived by the device and/or network. If this is carried out in the OS or software layers, vulnerability of the system will be increased overall as the OS of a mobile device is a target for the cyber criminal community.
A robust software-based solution is, however, being rolled out in the United Kingdom in the form of eSMS, bringing mobile operators, government and handset vendors together to provide location data via SMS to the PSAP. The advantage of this approach is that no new standards or major infrastructure changes are required, and the time to implement is small.
Further discussions established that future chipsets are likely to use whatever GNSS signals are available, regardless of whether they are GPS, Galileo, GLONASS, Beidou and so on. This, coupled with new signal processing techniques (single-frequency observable for example), increasing sensor clustering on devices, and user demand for services, may make the use of a specific GNSS system above others somewhat redundant. Certainly picking up on a point made by Chandu Thota from Google, GNSS is “not relevant” for their indoor positioning solutions, and technologies they are working on, in both hardware and mapping improvements, are looking at meeting indoor accuracy requirements down to a target requirement of 1 meter, without GNSS.
Taking these points into account, questions were asked from the floor of the conference about the legal position of the EC mandating Galileo as a positioning method as well as the willingness of the global mobile chipset and device industry to be told what to do. Perhaps specifying strong performance criteria, as in the United States, is the way forward to “reboot” the European E112 system. No one disputes that a properly functioning E112 is a life saver and a good thing to do; however, the points discussed here detail some of the concerns expressed during and after hours at INC15.
In February 2015, the Royal Institute of Navigation hosted the International Navigation Conference in Manchester, UK. Keynotes at this well-attended conference included Harold Martin, director of the GPS Coordination Office; Gian Gherardo Calini, the head of market development at the European GNSS Agency; Todd Humphreys from the University of Texas; Chandu Thota from Google; and others. The conference covered multiple technology tracks including indoor navigation, autonomy, quantum technology and the resilience of GNSS systems.
Andy Proctor is lead technologist for satellite navigation at InnovateUK, the UK’s innovation agency. He acknowledges Ramsey Faragher, Cambridge University, for help in the preparation of this article.
2015 GNSS Market Report: European GNSS Agency Provides a Fresh Look at Worldwide Growth
The fourth edition of the European GNSS Agency’s (GSA’s) GNSS Market Report provides a comprehensive source of knowledge on this dynamic global market. The report has become a key reference for organizations building their GNSS market strategies. The new edition provides:
Comprehensive updates on previous analyses;
New statistics of the GNSS receiver capabilities of the 31 top global manufacturers, offering in total more than 300 models;
Insights on the GNSS industry and regional shares of the GNSS market
A more granular segmentation of the global GNSS market, namely: European Union (EU28); North America (including the United States, Canada, Mexico); Asia-Pacific (including China, Japan, Australia, India, Republic of Korea); Non-EU28 Europe (Norway, Switzerland, Russia, Ukraine); Middle East and Africa (Turkey, Israel, South Africa, UAE, Saudi Arabia); South America and Caribbean (including Brazil, Argentina, Colombia, Guatemala)
Information on a new market segment: Timing and Synchronization
Plus additional applications within existing segments, such as recreational navigation, fishing vessels, personal locator beacons, emergency locator transmitters and digital tachograph.
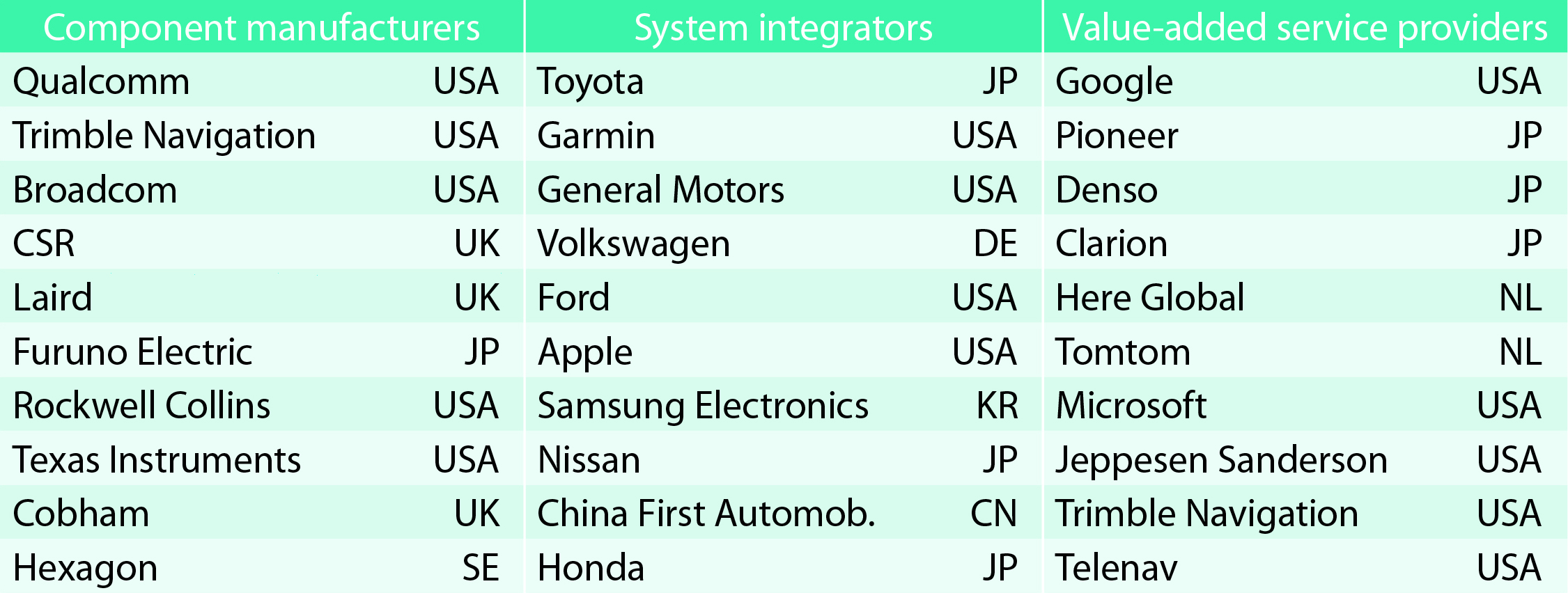
TABLE 1. Top 10 companies in each group based on 2012 revenue.
Key Findings
Top-line insights from the fourth GSA GNSS Market Report:
The global GNSS downstream market is forecast to increase by 8.3 percent annually from 2013– 2019, then slow down to 4.6 annually around 2023, growing on average faster (7 percent) than the forecast global GDP in this period (6.6 percent).
The installed base in the mature regions of EU28 and North America will grow steadily (8 percent per year) to 2023. The primary region of growth will be Asia-Pacific, which is forecast to grow 11 percent per year from 1.7 billion in 2014 to 4.2 billion devices in 2023 — more than the EU and North America together. The Middle East and Africa will grow at the fastest rate (19 percent per year), but starting from a lower base.
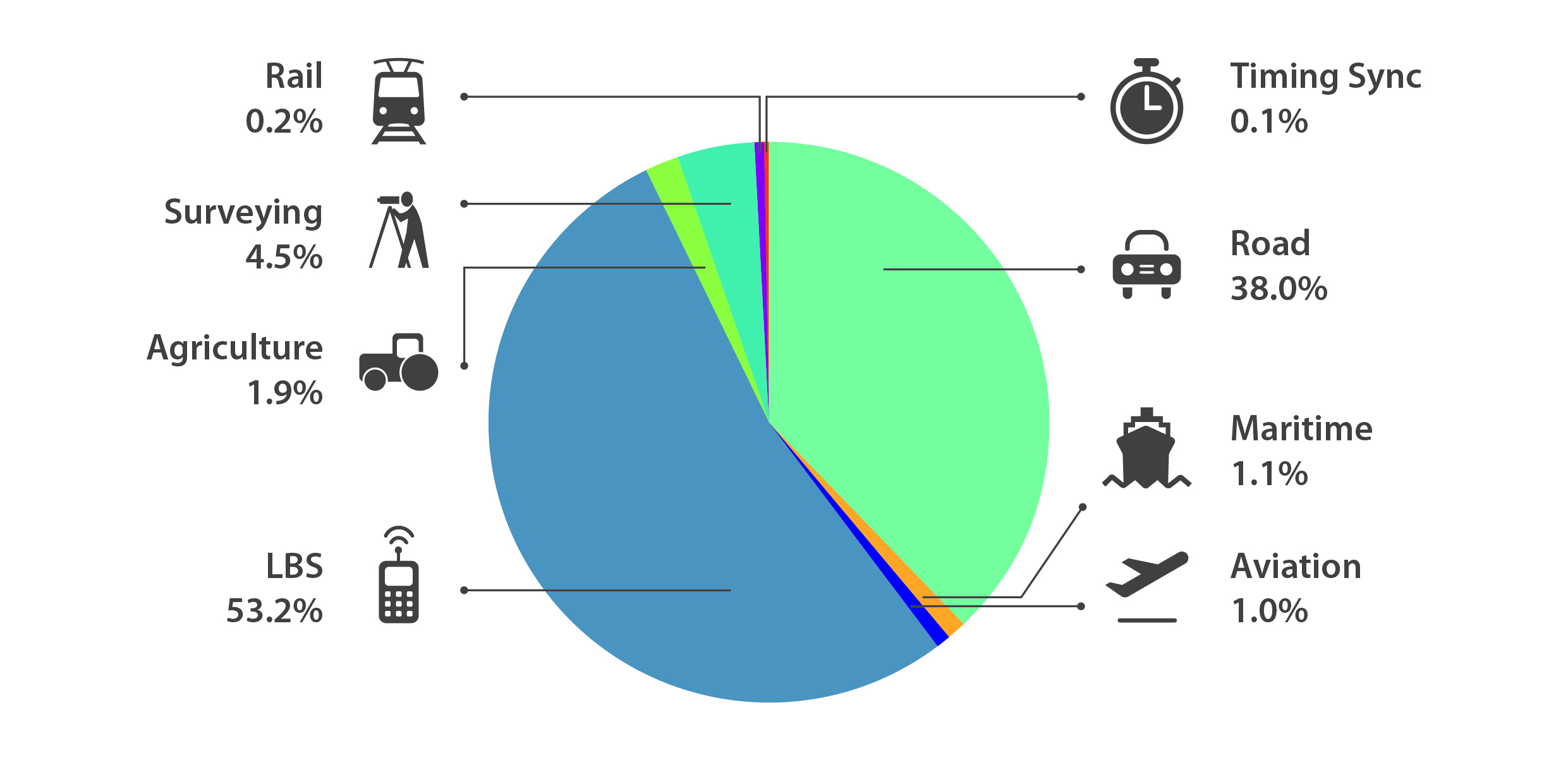
Location-Based Services (LBS) and Road dominate cumulative GNSS revenues, driven by booming sales of smartphones and in-vehicle devices, location-aware applications and data services.
With emerging economies catching up in terms of GNSS devices per capita, the Digital Divide will narrow, driven by the take-up of smartphones. The growing dominance of smartphones (3.08 billion in 2014) is foreseen as the most popular platform to access LBS.
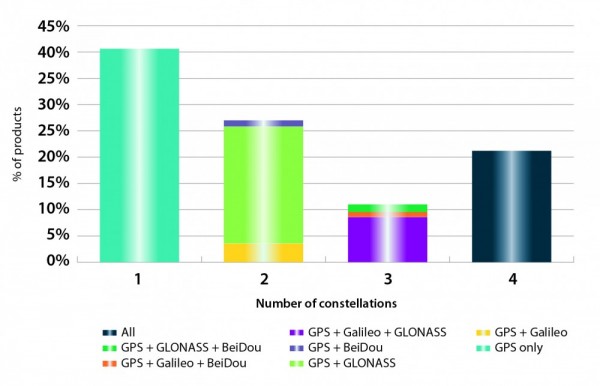
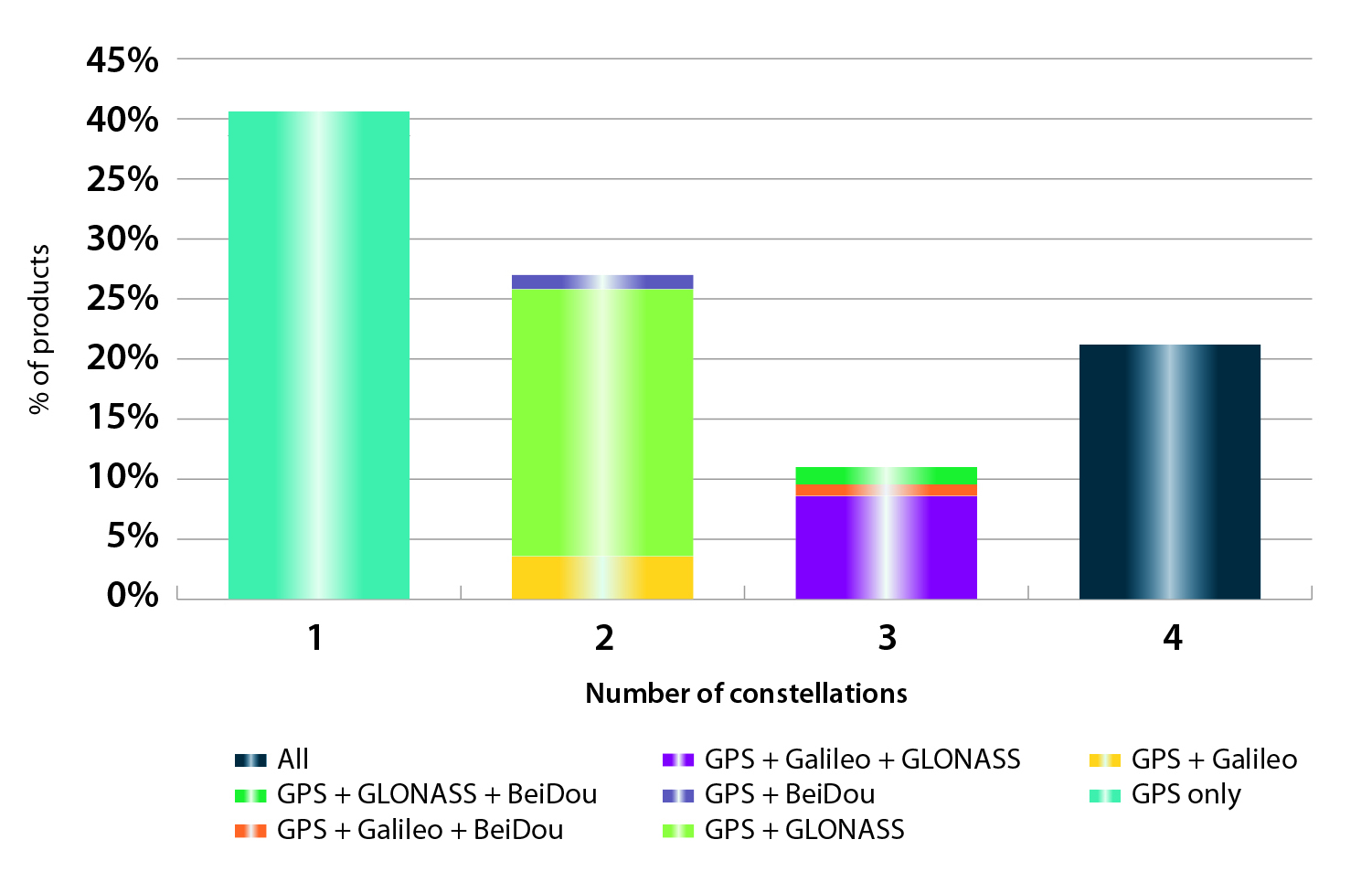
In the analysis of the capabilities of GNSS receivers and chipsets, it is reported that more than 60 percent of currently available receivers and chipsets support a minimum of two constellations with more than 20 percent supporting all four of them.
FIGURE 2. SUPPORTED CONSTELLATION BY RECEIVERS Chart shows the percentage of available receivers capable of tracking signals from one GNSS (such as GPS only), two GNSS (GPS + Galileo, GPS + GLONASS, GPS + BeiDou), three GNSS (GPS + Galileo + GLONASS, GPS + Galileo + BeiDou, GPS + GLONASS + BeiDou) or tracking signals from all constellations at the same time. The percentages add up to 100 percent. We can conclude that almost 60 percent of all available receivers, chipsets and modules are supporting a minimum of two constellations, showing that multi-constellation is becoming a standard feature across all market segments.
New Charts
The report includes new infographics presenting:
Global GNSS downstream market size, core and enabled (2013 to 2023)
GNSS industry share by region (2012)
The global shares of companies among components manufacturers, systems integrators and value-added service providers (2012)
Capability of GNSS receivers and chipsets, all segments (2015)
Supported constellation by receivers and chipsets , all segments (2015)
Detailed analysis of key GNSS segments: LBS, Road, Aviation, Rail, Maritime, Agriculture, Surveying, Timing and Synchronization, quantified in terms of:
Shipments of GNSS devices by application and region (2013 to 2023)
Installed base of GNSS devices by application and region (2013 to 2023)
Core revenues from GNSS device sales by application and region (2013 to 2023)
Capability of GNSS receivers and chipsets (2015)
Supported constellation by receivers and chipsets (2015).
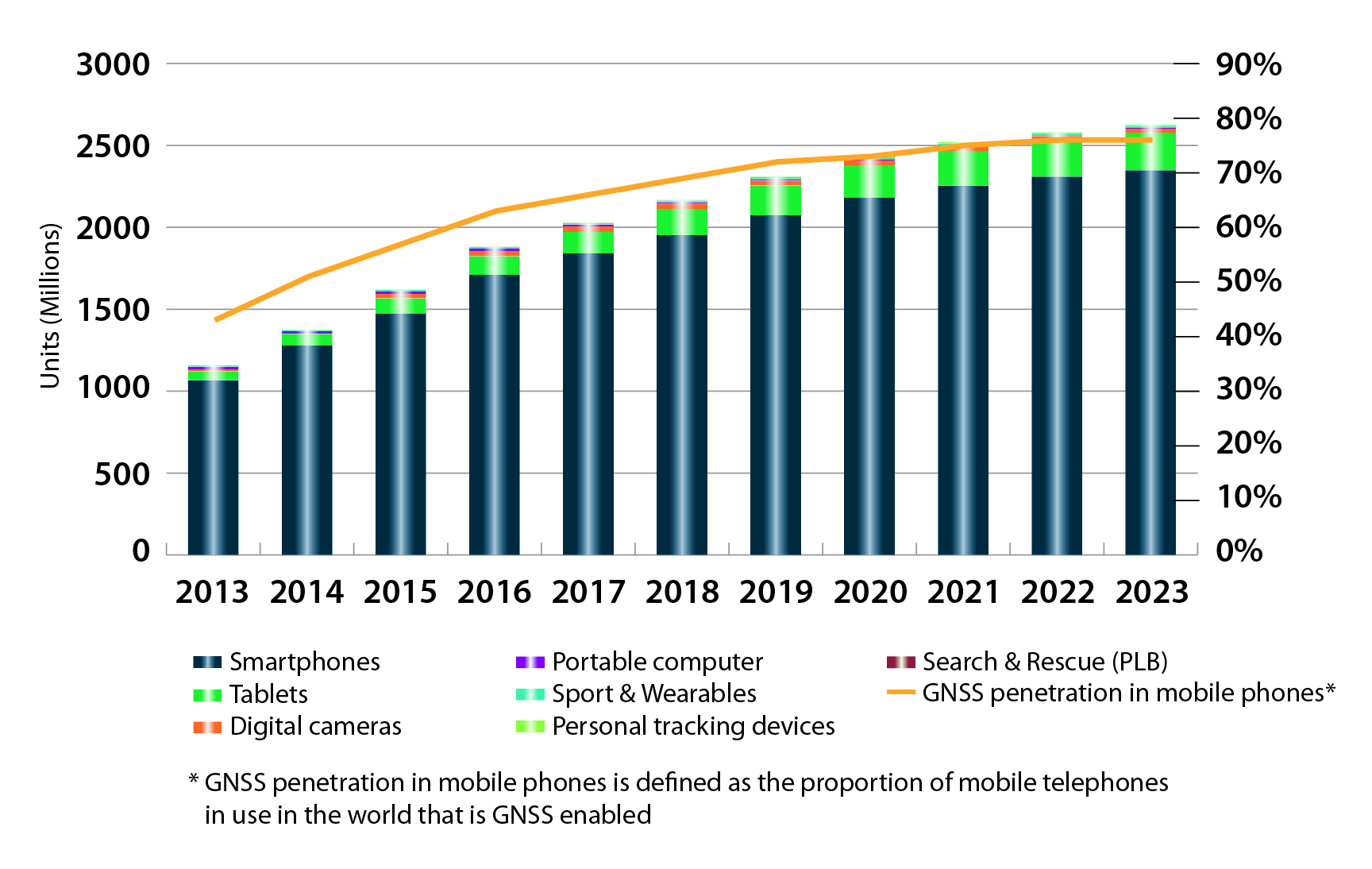
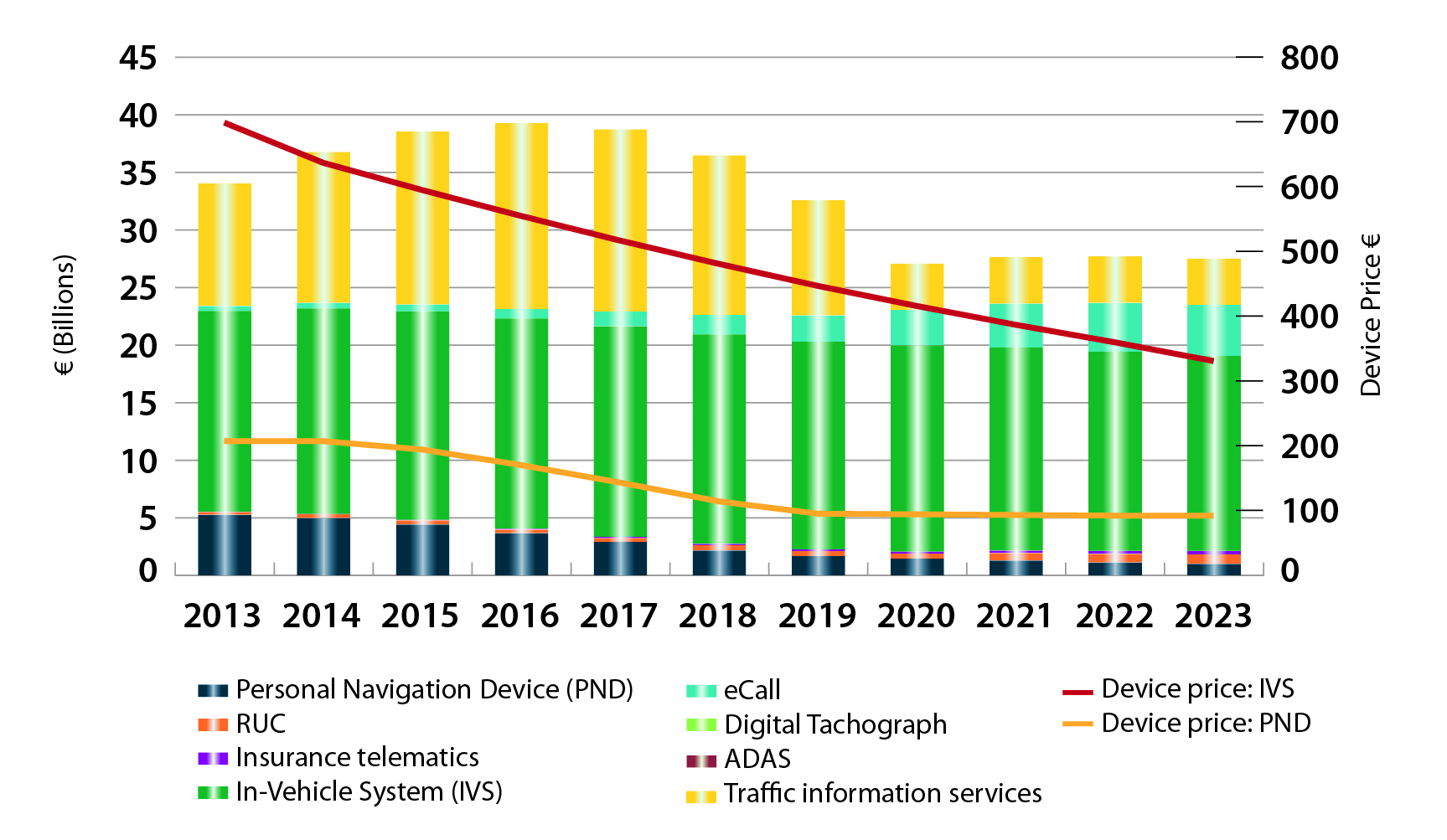
FIGURE 3. LOCATION-BASED SERVICES SECTOR GNSS shipments by type; GNSS penetration in mobile phones is defined as the proportion of mobile telephones in use in the world that is GNSS enabled.FIGURE 4. ROAD SECTOR Core revenue from GNSS device sales and services by application.
Methodology
The “GSA GNSS Market Report” is compiled by the GSA and the European Commission and was produced using the GSA’s systematic Marketing Monitoring and Forecasting Process.
The underlying market model uses advanced forecasting techniques applied to a wide range of input data, assumptions, and scenarios to forecast the size of the GNSS market in terms of shipments, revenue and installed base of receivers.
Historical values are anchored to actual data in order to ensure a high level of accuracy. Assumptions are provided by expert opinions and model results are cross-checked against the most recent market research reports from independent sources, before being validated through an iterative consultation process with sector experts and stakeholders.