“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Free navigation history course
Photo: Harvard University
Harvard University offers PredictionX: Lost Without Longitude, a free online course that examines the evolution of navigation from ancient methods to modern technologies. The program explores the science and history of navigation, focusing on the challenges of determining longitude before GPS existed. It highlights key advancements, such as John Harrison’s marine chronometer and the Longitude Prize. Through multimedia content — including videos, infographics and Worldwide Telescope tours — the course is designed to demonstrate how centuries of advancement in navigation enabled humanity to achieve milestones such as landing on the moon.
Self-driving cars collect geospatial data
Photo: Finnish Geospatial Research Institute
In Finland, self-driving cars are being used to collect geospatial data to address urban challenges. The ARVO autonomous vehicle from the Finnish Geospatial Research Institute is equipped with high-precision sensors that map its environment in real-time, collecting information on road conditions, urban vegetation as carbon sinks and factors influencing flood risks. In partnership with Aalto University and funded by the European Regional Development Fund, this initiative seeks to explore various uses of this data, such as city planning, environmental monitoring and infrastructure management.
Stopping scammers
Photo: Carlos Alvarez / iStock Editorial / Getty Images Plus / Getty Image
Google has taken legal action against a network of scammers responsible for creating more than 10,000 fake business listings on Google Maps. The scammers fabricated profiles targeting urgent service industries and bolstered them with fake reviews to appear credible. Victims were misled into contacting these fake businesses, which then sold their personal information as “leads” to legitimate service providers without consent. Google has removed the fake listings and is suing individuals involved in the scheme, CBS News reported.
Mapping Uganda’s disappearing tropical glaciers
Photo: guenterguni / E+ / Getty Image
Project Pressure, in collaboration with UNESCO and the Uganda Wildlife Authority, conducted an expedition to the Rwenzori Mountains to map the region’s disappearing tropical glaciers. The team created the first 3D model of Mt. Stanley’s glaciers and installed monitoring equipment, revealing that Mt. Speke and Mt. Baker have lost their glaciers entirely, while the Stanley Plateau Glacier has shrunk by 29.5 percent since 2020 and is heavily fragmented. The project aims to continue monitoring the glacial retreat, develop mitigation strategies and engage the local community in ongoing research.
Artificial intelligence (AI) has become part of the daily lexicon, and an endless stream of media reports assert that AI either has affected or will affect most aspects of human life. What is AI and what are its components? How is it being used in GNSS technology? What is the near-term potential of AI in GNSS/PNT? These are weighty, evolving questions for which this column attempts an initial synthesis.
AI definitions and descriptions vary widely. One general and broad definition from IBM (2025) is “Artificial intelligence (AI) is technology that enables computers and machines to simulate human learning, comprehension, problem solving, decision-making, creativity and autonomy.” The idea of thinking machines (Turing, 1950) and the term “artificial intelligence” were introduced in the 1950s (McCarthy, 2007). The 1960s and 1970s saw the development of neural networks. The 1980s brought advances in neural network training and deep learning. The 1990s saw rapid advances in computing power. Big data and cloud computing developments in the 2000s allowed for the management and analysis of large datasets. The 2010s brought deep neural networks/deep learning, and the 2020s have seen the introduction and flourishing of large language models.
This column primarily focuses on the impacts that AI is directly having and could potentially have on GNSS hardware and PNT solutions, including receiver signal acquisition, measurement processing, position estimation, integrity and mitigation of jamming and spoofing. Due to space limitations, it will limit discussion to topics such as GNSS-based sensor fusion, navigation system routing, application-specific customizations, etc., all of which are undergoing significant AI-related infusions. A suitable guide to consider is the list of tasks for which evolving AI approaches can outperform existing methods in meaningful and efficient ways. For example, in error modeling or optimal estimation, can AI-based techniques fill gaps in non- or only partially-deterministic processes?
Essential
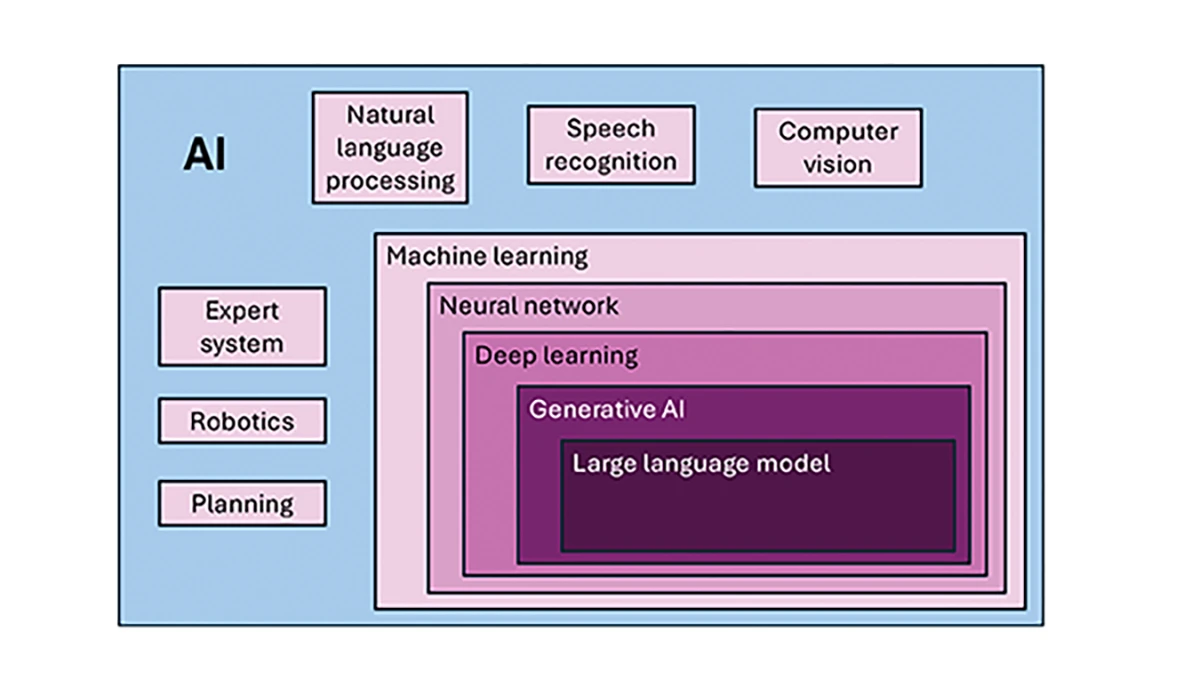
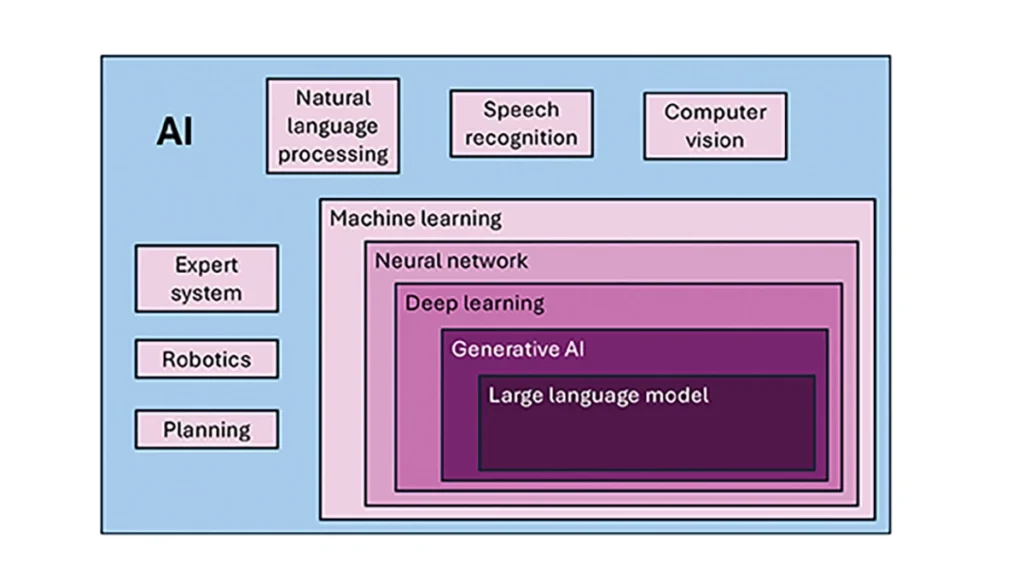
To investigate the current and potential uses of AI in GNSS, it is essential to define its components, especially as some terms are misused or conflated. The presented description is based on a wealth of Internet-based information, including from IBM (2025). Figure 1 illustrates the current broad concepts within, or subsets of, AI based on a synthesis of nomenclature used. In the figure, AI — defined here as a machine that exhibits human-like intelligence — is the superset. Within AI, there are many concepts or subsets that can be categorized, though they can overlap. There is perception intelligence, such as text and space recognition, and there is the broad area of machine learning.
Figure 1: Concepts within/subsets of AI.
Sophisticated processes have been developed and continue to rapidly evolve to give machines the ability to sense, learn and make decisions. Natural language processing (NLP) allows machines to recognize, understand and generate text following human language. Voice recognition is similar, in that the machine transcribes speech to text and back. Computer vision enables machines to interpret and analyze imagery. While robotics is a field of its own, within the superset of AI, it can be seen as an application of AI to motion. Planning refers to autonomously solving planning and scheduling problems. And expert system is the field of AI dedicated to simulating human expertise, judgment and behavior. All of these AI subsets are typically enhanced with machine learning (ML).
ML involves the development of algorithms and statistical models that can infer patterns (i.e., learn) from existing data without explicit instructions (i.e., rote training) and apply this knowledge to new data. Based on the learning approach, there are four types of machine learning algorithms: supervised, semi-supervised, unsupervised and reinforcement. (ML can also be classified by functionality.) Supervised learning uses manually labeled datasets to accurately train algorithms to classify data or predict outcomes. In semi-supervised learning and unsupervised learning, relationships are found with less or no explicit human interaction, respectively. Reinforcement learning combines these approaches with goal optimization. There are many types of ML techniques/algorithms, such as linear regression, logistic regression, decision trees, random forest, support vector machines, k-nearest neighbor and clustering, each designed for different types of problems and data.
Neural networks (NNs) or artificial neural networks are modeled after the human brain. A neural network model contains a given input layer and output layer, each with a set of nodes. These layers and nodes are interconnected with a set of hidden layers of nodes, with each node having a weight and bias, determined (i.e., estimated) based on the specified network inputs and outputs by utilizing one of a selection of optimization techniques. NNs can work well for tasks that involve identifying complex patterns and relationships given large amounts of data, though the details of specific parameter interrelationships cannot necessarily be determined by such models — therefore sometimes referred to as “black box” models. There are several types of neural networks, including convolutional NNs, long short-term memory networks, autoencoders, recurrent NNs, transformers, etc.
Deep learning refers to the depth of layers in a neural network. A deep learning model neural network contains at least three, but typically hundreds of hidden layers. Having many layers allows for unsupervised, fast and accurate identification of complex patterns and relationships. Generative AI can be described as deep learning models that generate new/original content, e.g., text, image or audio data through a variety of training, tuning and generation processes. Finally, large language models can read, understand and generate human language (refer to NLP), making use of all the functionality of ML.
Elements
How machine learning is used in GNSS
So, when should AI be used in GNSS/PNT tasks? A rudimentary answer is whenever AI can perform better (in some specified and measurable sense) than existing methods. The determination of this answer for a particular scenario requires research. From the descriptions of AI and its subsets, GNSS/PNT output is used in myriad AI applications such as sensor fusion, autonomous vehicle navigation, route planning, etc. However, it is primarily the ML subset of AI that is being researched for use in GNSS signal and measurement processing.
ML models can be categorized by their fundamental methodology, as either generative or discriminative, or by the tasks for which they are used: either regression or classification (IBM, 2025). Generative algorithms model the distribution of data points with the goal of predicting the joint probability of a data point appearing in a particular space, whereas discriminative algorithms model the boundaries between classes of data with the goal of predicting the conditional probability of a given data point being in a specific class. Regression models predict continuous values and are mainly used to determine the relationship between one or more independent variables and a dependent variable, whereas classification models predict discrete values and are mainly used to determine a category or class, e.g., binary or multi-class.
Siemuri et al. (2022) provide a comprehensive review of recent research (from 2020 through 2021) in which ML techniques are used in GNSS problem solving and provide a categorization of GNSS use cases. Relevant key findings include: 1) ML is proposed to increase GNSS/ PNT robustness under degraded signal environments; 2) more than 200 studies were assessed; 3) in most cases, the ML approaches outperformed (at varying levels of significance) the traditional GNSS models; and 4) industry adoption of ML in GNSS so far appears limited. The analysis found that neural networks were used in more than half of the studies (55%) — including some deep learning, while support vector machine and decision tree/random forest techniques were used in 19% and 10% of the studies, respectively. Use cases for machine learning in GNSS were categorized as: i) signal acquisition; ii) signal detection and classification; iii) Earth observation and monitoring; iv) navigation and positioning; v) denied environments and indoor navigation; vi) atmospheric effects; vii) spoofing and jamming; viii) GNSS/inertial integration; ix) satellite selection; and x) LEO satellite orbit determination and positioning.
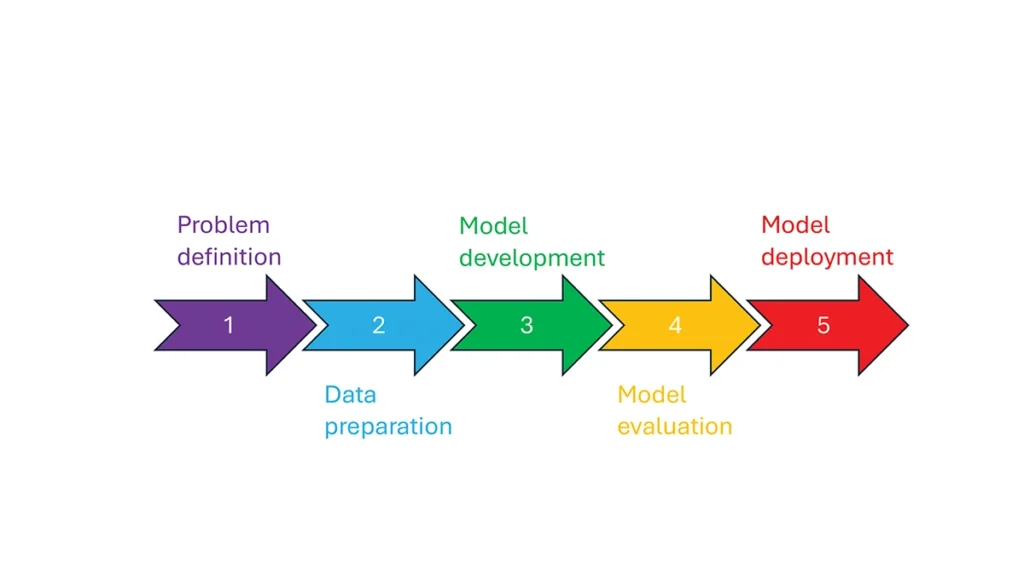
So, how is machine learning used in these GNSS/PNT use cases — and in general? How ML is applied can be described as a set of steps or a cycle with a varying number of components. Figure 2 presents a graphical synthesis from the literature, with a grouping of five core steps.
Step 1 — problem definition: understanding the problem(s) and goals, defining the available data, defining the problem inputs and outputs, determining the category of ML to use and selecting evaluation metrics.
Step 2 — data preparation: collecting the data, editing them, and labeling them if employing supervised classification.
Step 3 — model development: selecting the algorithm, selecting the model, building the model and training the model.
Step 4 — model evaluation: validating the model, tuning the model, analyzing the results, cross-validating the results and applying the evaluation metrics.
Step 5 — model deployment: finalizing the model, applying the model in prediction, and, if necessary, feeding back into the start of the cycle.
Figure 2 Steps in, or cycle of, machine learning implementation.
The scikit-learn (2025) library is a popular resource for Python-based ML information, tools and examples. An illustrative example of how ML can be used in GNSS for signal classification and measurement weighting is given by Li et al. (2023). The authors describe the process for designing the ML problem-solving scenario, selecting the models that are either of the regression or classification type and comparing the performance of many popular ML models to detect direct line-of-sight versus non-line-of-sight and multipath signals in urban environments. Note that most applications of machine learning in GNSS involve some form of supervised classification.
Initial and potential machine learning uses in GNSS
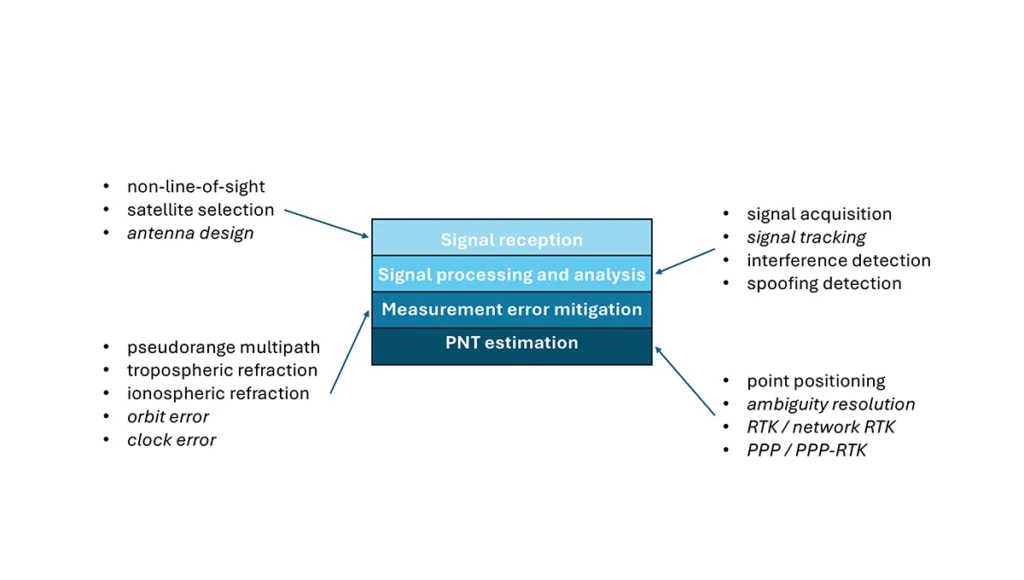
For this column, a brief synopsis is given of the use of machine learning in GNSS in the context of the application themes of signal reception, signal processing, measurement error mitigation and PNT estimation, as illustrated in Figure 3. Correspondingly, potential ML uses are also considered.
Figure 3: Application themes of machine learning in GNSS with initially studied and potential research areas.
Signal reception
Studies including Tsu (2017) and Li et al. (2023) have used various machine learning models to differentiate between line-of-sight, non-line-of-sight and pseudorange multipath GNSS signals in urban environments. Various input features, such as signal strength, are used to train models, resulting in majority accurate classification. ML has been used to optimize satellite selection (rather than using all available tracked satellites) for efficient PNT processing. Radio frequency hardware and software simulators can use ML to improve the realism of propagated signals in various environments and under different dynamics, including multipath, interference and spoofing. There is also the potential for ML to be used to improve antenna design, including for controlled radiation pattern antennas that generate one or multiple nulls.
Signal processing and analysis
Deep learning models have been used for signal acquisition and show improvement over current methods with simulated data (Borhani-Darian et al., 2023). There may be potential for the use of ML in signal tracking or in the design of new tracking algorithms and processes. Studies have shown that ML can be used to detect natural and intentional radio frequency interference. Various ML models have successfully been used to produce accurate classification of radio frequency interference jammer types (e.g., Morales Ferre et al., 2019). ML has also been used to detect signal spoofing with simulated and real signals with high levels of validation (e.g., Semanjski et al., 2020).
Measurement error mitigation
As GNSS multipath is a non-deterministic (and non-zero mean) process, it is a strong candidate for machine learning-based mitigation, especially meter-level pseudorange multipath (compared to centimeter-level carrier-phase multipath). Such studies, combined with non-line-of-sight classification, have been described in the previous section.
Initial investigations of the use of machine learning in the mitigation of tropospheric refraction appear promising (e.g., Łoś, et al., 2020). The wet tropospheric delay on GNSS signals is irregular, making it difficult to predict. Therefore, there is great potential for improved anomaly detection, refraction modeling and more accurate severe weather nowcasting.
As with tropospheric refraction, ionospheric refraction, while well understood, is difficult to model accurately, especially during periods of high solar activity. Machine learning has been shown to accurately detect anomalies and scintillation (e.g., Linty et al., 2018) and potentially for nowcasting.
There is the potential to improve GNSS satellite orbit and clock estimation with ML, as these are both well-defined processes, but also contain levels of process uncertainty. For example, it is usual to include once-per-orbital revolution empirical accelerations in orbit estimation states, and satellite force models can always be improved. Consequently, ML studies may aid in such GNSS network processing to improve the accuracy of real-time and post-processed correction products.
PNT estimation
Well-established optimal estimation techniques such as least-squares and Kalman filtering work extremely well for most GNSS/PNT estimation cases. However, hardware limitations and environmental conditions can lead to measurements not meeting the technical assumptions of these conventional approaches, e.g., the use of independent measurements, the absence of systematic errors, the absence of gross errors, the use of realistic measurement variances, etc. Deep learning models have the potential to improve GNSS point positioning (e.g., Kanhere et al., 2022) in test data, if poor model numerical conditioning, changing satellite visibility and model overfitting are managed. There is potential research in the use of machine learning methods to improve carrier-phase ambiguity resolution, and in the centimeter-level positioning techniques of real-time kinematic (RTK)/network RTK, and precise point positioning (PPP)/PPP-RTK.
Broader AI/ML use within GNSS-based PNT
Clearly, GNSS/PNT outputs are used in a broad spectrum of applications, for which AI and ML are currently being used or have the potential of being used to attain and enhance goals. Machine learning has been used to improve GNSS-derived position time series analysis for many Earth science applications, including in plate tectonics, tsunami monitoring, vulcanology, subsidence monitor, GNSS reference station monitoring, overall measurement integrity, etc. and in diverse GNSS-enabled techniques such as radio occultation and reflectometry (Siemuri et al., 2022).
ML has the potential to allow for improvements in sensor fusion, chief amongst these being GNSS/inertial measurement unit (IMU) integration. Improvements can be found in IMU calibration and in managing functional and dynamic mismodeling for specific user applications. Wider, multi-sensor fusion, such as for simultaneous location and mapping solutions, rely heavily on ML approaches, such as reinforcement learning.
Finally, GNSS-based PNT is used in most of the non-ML subsets of AI. GNSS-based position information is central to many outdoor robotics, planning and computer vision algorithms, providing either seeding localization information for other sensors or processes, or core position information for the overall AI-driven system.
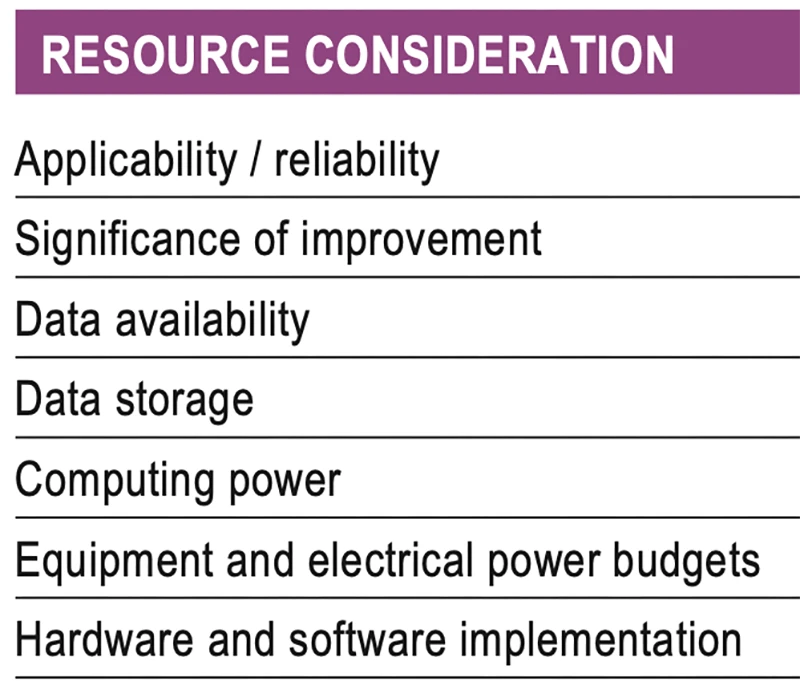
Machine learning resource considerations
As with all technology, a cost/benefit analysis is required when considering the application of ML in a specific GNSS use case. Table 1 summarizes the broad considerations. Can the problem at hand be reliability mitigated with ML, in the sense that there are complexities that are difficult or impossible to physically model, but sufficient patterns in the data to be modeled by ML? If ML can outperform a conventional approach using specified metrics, is the improvement significant to the user? Are there large enough, i.e., sufficient and varied, datasets to train a model for prediction over expected data variations? As most ML algorithms require large amounts of computing storage for large datasets, typically from data servers, can the necessary computing power be brought to bear? Similarly, given that most ML algorithms require large amounts of computing power for myriad computational operations, typically utilizing graphics processing units (GPUs), is such computing power available? As storage servers for large datasets and GPUs for processing are expensive and require large amounts of electrical power, are the financial and electrical power, environmental and security resources available? And finally, how practical is it to implement the ML model on user equipment or via servers?
Table 1 Resource considerations for machine learning use in GNSS.
Evolutionary
AI is a broad field that is rapidly developing and entering service in most technologies. While AI includes many subsets such as computer vision, natural language processing and robotics, the ML subset (which includes neural networks, deep learning and generative AI) has the most direct applicability to GNSS/PNT. Of the available ML models used in GNSS, most are supervised (i.e., they use labeled training data), and the majority use neural networks. Initial studies of applications such as signal classification and interference detection indicate that supervised ML models perform better than traditional approaches.
Many subsets of AI, such as computer vision and robotics, rely heavily on ML, while GNSS/PNT has only recently seen investigations in ML use. For many applications, it can be that conventional deterministic models, physics-based models or optimal estimation techniques work well and reach desired performance standards. However, as GNSS/PNT continues to trend to lower cost hardware, harsher environmental conditions and increasing safety-of-life usage, PNT outliers and corner cases grow in importance, and ML can potentially provide solutions, as outlined in Figure 3. These are the early days of investigating and applying ML in GNSS/PNT. To use ML or not to use ML — that is the question. There are many factors to consider, as described in Table 1. Performance improvements over current approaches and operational practicality (i.e., costs) will dictate ML adoption. Much more research is required in many GNSS/PNT applications, followed by significant wide-spread testing and tuning of developed ML models. It is difficult not to predict the near-term adoption of ML in at least some GNSS/PNT use cases, if they will benefit our daily lives. Look for future columns that will examine and investigate ML implementations in specific GNSS/PNT applications that prove its efficacy.
Read a roundup of recent products in the GNSS and inertial positioning industry from the May 2025 issue of GPS World magazine.
SURVEYING
Integrated Navigation Solution Ideal for inspection and survey applications
Photo: Teledyne
Teledyne Compact Navigator is an ultra-compact autonomous integrated navigation system engineered for subsea and surface vehicles. It is ideal for small vehicles, enabling inspection and survey operations on compact platforms. The system is offered in two depth-rated models, one capable of operating at 4,000 m and another at 300 m. The Compact Navigator consumes less than 7 watts of power, extending mission duration by conserving energy. The system operates fully autonomously, eliminating the need for external aiding or operator intervention. Advanced phased array Doppler Velocity Log technology enhances performance while allowing the device to be mounted on an autonomous underwater vehicle or ship hull.
The Compact Navigator supports a broad range of applications, including autonomus underwater vehicles, shallow water surface navigation, operations in GNSS-denied environments and dynamic positioning for surface vehicles. The system provides true North-seeking gyrocompass-grade performance, and its web-based user interface supports integration, operation and troubleshooting. It is factory-calibrated and offers a battery backup option for reliability in demanding conditions. The system operates independently of satellite signals, making it resistant to jamming or signal loss. This capability is significant for shallow water navigation, where GNSS-based systems may be unreliable.
3D Reality Capture Solution Can be used across various industries
Photo: Faro
FARO Blink, a new 3D reality capture solution, is designed to make collecting and utilizing 3D data more accessible and efficient. It centers on software-driven technology integrating advanced visualization and automated workflows through the FARO Sphere XG Digital Reality Platform. This integration aims to simplify operations and deliver faster, more actionable insights for users across various industries.
FARO Blink is tailored for professionals in fields such as surveying and construction. It offers high-quality visualization and can streamline workflows, allowing teams to efficiently capture, view and share 3D data, thereby enhancing project progress and collaboration.
The MS400C is a fully integrated multibeam echosounder designed for uncrewed surface vessels. The new system combines sonar processing, inertial navigation, GNSS positioning and sound velocity sensing into a single unit.
The MS400C seeks to address deployment challenges faced by USV operators during hydrographic surveying. Its compact, lightweight design allows direct mounting on small platforms. Installation involves connecting a few cables to the IPC and power supply and to the primary and secondary GNSS antennas. With preconfigured spatial relationships, operators can deploy and start surveying quickly, reducing configuration errors and ensuring consistent data quality.
Equipped with Auto Survey functionality, the system calibrates parameters based on water conditions, which streamlines pre-survey procedures. Real-time roll compensation and attitude data from the internal measurement unit, combined with sound velocity profiling, ensure high-fidelity depth measurements, even in dynamic conditions. Designed for autonomous and remotely operated survey platforms, the MS400C supports data collection in confined waterways.
The SurveyPod RTK/PPK GNSS system is built for professionals in surveying, agriculture, mining and construction. The system integrates GPS, GLONASS, Galileo and BeiDou signals for improved satellite visibility and accuracy, even in harsh environments.
Powered by a CORS Network, SurveyPod offers real-time, centimeter-level positioning ideal for high-precision applications. The device supports tilt compensation for reliable data collection at angles and boasts up to 16 hours of battery life, making it ideal for extended field operations. With this launch, Nibrus Technologies is expanding its survey equipment portfolio, offering a Made-in-India GNSS solution to the global market.
This MEMS-based north-seeking inertial measurement unit (IMU) operates independently of GNSS. It can achieve a heading accuracy greater than 1° secant latitude without GNSS assistance. When integrated with GNSS and SBG Systems’ navigation algorithms, it can achieve INS heading accuracy greater than 0.01°.
Measuring 52 x 52 x 36 mm and weighing less than 150 g, it consumes only 2 watts of power. It offers long-term reliability in demanding conditions, and its ITAR-free status allows unrestricted global deployment. SBG Systems also has developed a new pure north-finding algorithm capable of rapid initialization in both static and dynamic conditions within one minute, as well as an advanced GNSS/INS fusion algorithm that delivers exceptional single-antenna heading accuracy even in low-dynamic environments.
The IMU is particularly suited for subsea applications, including remotely operated vehicles and autonomous underwater vehicles, as well as geospatial and marine surveying tasks requiring precise single antenna heading accuracy.
The first off-the-shelf solutions are expected to be available by early 2026. SBG Systems
Post-Processing Software With upgraded features
Photo: SBG Systems
Qinertia 4.2 is an updated version of SBG Systems’ post-processing software for GNSS and INS data. One of the notable additions is the beta version of Precise Point Positioning Fixed Ambiguity, which offers centimeter-level accuracy processing without the need for a base station. The update also includes a new RTS smoothing option, the Trajectory Smoother, which enhances INS processing by removing artifacts while maintaining precision. Another feature is the standalone Lever Arm Estimation Tool, now available as a separate application with a simplified interface. The Advanced Virtual Base Station Network Creation has been enhanced with improved base station quality indicators to increase reliability.
It is compatible with the New Ellipse series and supports Teledyne Intrepid INS. The software now offers faster processing speeds, enhanced geodesy functionalities such as base station velocity analysis, and updated tools for assessing processing quality through new status plots. It also supports the latest firmware versions of Ekinox, Apogee, Navsight and Quanta systems. SBG Systems
MACHINE CONTROL
GNSS Receiver and INS System For machine guidance
Photo: Septentrio
The AsteRx RB3 GNSS receiver and the AsteRx RBi3 GNSS/INS system are designed to operate in extreme environments. They feature IP69K-rated housings and components that have undergone ISO-standard testing.
The technology offers durability under heavy shocks, vibrations and challenging environmental conditions, making it suitable for demanding applications such as construction, mining and port automation.
The AsteRx RB3 and RBi3 utilize multi-frequency GNSS technology to deliver precise, centimeter-level positioning even in environments where GNSS signals are typically difficult to maintain. The receivers can be mounted externally on heavy machinery or integrated into chassis systems, offering flexibility in placement and simplifying installation.
The AsteRx RBi3 incorporates FUSE+ technology, which combines a high-performance GNSS engine with an industrial-grade inertial sensor. This integration provides accurate orientation data, such as heading, pitch and roll, alongside reliable positioning. In dual-antenna configurations, the receivers deliver sub-degree GNSS heading accuracy immediately upon initialization. The AsteRx RB3 and RBi3 are ideal for machine guidance in industries requiring rugged equipment to maintain precision under extreme conditions.
Handheld Reality Capture Solution For maximum mobility
Photo: Topcon Positioning
Designed for mass data solutions, the CR-H1 utilizes PIX4Dcatch, a specialized application with integrated lidar that runs on iPhone devices. It collects images and employs photogrammetry to create detailed, full-color 3D point clouds. The iPhone connects to Topcon’s HiPer CR receiver, enabling the application to collect georeferenced images. The receiver and iPhone are mounted on a specialized handle designed and manufactured by Topcon so that users can capture point clouds without a tripod.
The CR-H1 can be used for utilities and subsurface mapping, construction verification and earthworks, civil engineering and site verification, land surveying and forensics and 3D data capture. Topnet Live subscriptions are available for the CR-H1, providing real-time GNSS corrections that deliver higher-quality point clouds.
Handheld GPS Device Can provide up to 200 hours of GPS navigation on a single charge
Photo: Garmin
The Garmin eTrex Solar is a handheld GPS device with a built-in solar charging feature. This feature allows for potentially unlimited battery life in optimal sunlight conditions. Even without direct solar input, the device can provide up to 200 hours of GPS navigation on a single charge, making it suitable for extended trips with limited access to power.
The device supports GPS, GLONASS, Galileo, QZSS, IRNSS and Beidou. It features a rugged design, an IPX7 water resistance rating, and a compact, lightweight body that can be attached to a backpack or worn around the neck. Users can import GPX files and navigate to waypoints, courses and geocaches. It also includes a three-axis compass and can store up to a thousand waypoints, 50 courses and 200 activities.
Users can connect the eTrex Solar to their smartphones through the Garmin Explore app, which enables additional features such as geocaching details, weather updates, software updates, trip planning, and cloud storage syncing.
New Product Offerings Now featuring marine GNSS antennas
Photo: Geo-matching
Geo-matching has expanded its product database to include GNSS antennas. The initial marine GNSS antennas featured in this new category are the VP6300 from Calian GNSS, formerly Tallysman, and the AV34 from Trimble.
Geo-matching features detailed information on more than 1,300 products across 63 categories for surveying, navigation and machine guidance. The website is designed to guide users through complex product specifications, offering access to brochures, case studies, product videos and professional reviews. Among the many categories available on Geo-matching.com are hydrographic processing software, GNSS receivers, GIS software, inertial navigation systems, total stations, UAVs, sidescan sonars, imaging sonar and more. The platform encourages users to browse its extensive catalog, upload new products, leave reviews and register their companies to add products to the database.
Mapping UAV With a new “Smart Return-to-Home” feature
Photo: Flyability
Flyability has introduced a “Smart Return-to-Home” (RTH) feature for its Elios 3 UAV, designed to enhance its autonomous capabilities. This feature allows the UAV to return to its take-off point using the shortest available path while avoiding obstacles in real time.
During flight, Smart RTH monitors battery levels through a new flight management gauge, notifying the pilot when it is time to return. The feature is activated via Flyability’s Cockpit flight app, and pilots can take manual control at any point. By automating the return process, the system helps pilots focus on inspections without concerns about battery management or navigation in complex environments. Smart RTH uses lidar scans to generate a flight plan that the UAV executes independently.
The AirWarden Remote ID Receiver detects and decodes Remote ID signals broadcast by UAVs. It is designed for organizations and authorities that need to monitor UAV activity for safety, security and compliance with regulations.
It decodes the information transmitted by UAVs in accordance with FAA and other regulatory standards. The data it captures includes the UAV’s identification number, its precise location (latitude, longitude and altitude), the takeoff location, operator location if available, timestamps, and other relevant metadata.
The AirWarden can be deployed as a standalone unit or integrated into larger security and monitoring systems. Users interact with the system through a web-based or software interface that facilitates live monitoring, alert management, and data analysis.
Additionally, the AirWarden can integrate seamlessly with other security infrastructure, such as video surveillance and access control systems. This integration seeks to improve how security teams automate responses and coordinate actions when unauthorized or suspicious drone operations are identified.
Question: What are the main challenges facing GNSS/GPS-based autonomous solutions in terms of signal integrity, jamming and spoofing, and how are these being addressed?
Answer: Outside of the military, interference is the most common threat to GNSS, with the dominant source being cellular transmission harmonics. It is commonly addressed with out-of-band filters. Non-terrestrial networks (NTN), like Global Star uplink at 1.6 GHz, are gaining traction in more mobile and wearable devices to fill gaps in cellular availability. However, it can create coexistence issues for devices for concurrent L1 GNSS reception during NTN uplink.
In military cases, while intentional interference is effective, the increasing number of GNSS bands to cover requires more transmission power. Modernized GNSS signals with wider bandwidth signals require more jamming power, which risks detection by radiofrequency emission satellite systems such as Hawkeye 360. The frequency of spoofing events will likely continue to increase and spill over into civilian domains.
Thanks to the increasing number of test ranges being made available to commercial GNSS developers, anti-spoofing technology is making some gains, at least in the high-end systems used for autonomous GNSS.
Q: What are the most impactful use cases and sectors benefiting from recent advancements in autonomous solutions?
A: Ride sharing and transport are the likely winners in exploiting the cost savings of driverless systems with autonomous navigation. The past 15 years’ investments in the development of augmented navigation systems — mainly lidar and vision-based — are finally paying off as we see Waymo in service, and soon Uber and Tesla in commercial deployments. Still, these systems depend solely on GNSS as the absolute positioning system, used for navigation in non-urban environments, but also fallback in certain cases where the sensors are problematic, as well as system calibration.
Agriculture, being one of the first segments to exploit autonomous solutions, can still see incremental gains as GNSS corrections systems move RTK from local to regional, allowing some monthly service margin improvements. High-precision consumer products like robotic lawn mowers will be enabled with similar infrastructure. Data services are a key part of infrastructure, for communication as well as precision navigation enablement. Companies such as Swift Navigation, Point One Navigation and RxN networks are expanding their networks and competing with the likes of Trimble and Hexagon.
A 2019 RAND report for the U.S. Navy concluded that autonomy could still be in the distant future. The Navy should take care that a number of claimed autonomy applications could be more aspirational than practical, the report stated, with the applications nowhere near to operational capability. The authors wrote that huge investments may be required to achieve autonomous naval weapon systems, not only in autonomy.
Around the world in recent years, most armed forces and many advanced technology companies, along with government agencies, have been investing in AI and automation. Perhaps now, just six years later in 2025, we already are looking foward to unmanned vehicles that display not just fundamental autonomy, but also quite advanced “auto-capability.”
In the world’s water
The U.S. Navy (USN) has been operating a number of unmanned surface vessels (USV) over the past several years. In a 2023/2024 Pacific Fleet exercise, four USV models (Sea Hunter, Sea Hawk, Mariner and Ranger) were mostly operated autonomously. Ranger has a small bridge manned only for harbor maneuvers.
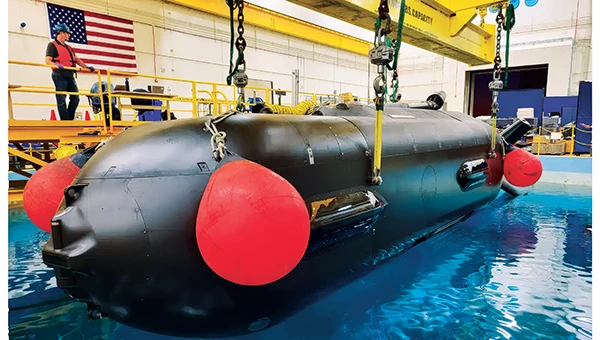
An Orca extra large UUV (XLUUV) is tested in a tank. With a range of 6,500 nautical miles, the submarine can perform long missions. Its navigation system features a Kalman-filtered inertial unit supported by Doppler velocity logs and depth sensors. Photo: Boeing
The USN has unmanned autonomy programs for large, small and underwater vehicles. The Orca submarine program is slated to consist of five 51-foot-long vehicles, and includes variants fitted with an added 30-foot payload section. To operate for several months underwater, it is likely that a similar degree of autonomy has been incorporated. ORCA surfaces regularly and can be given new routing if required.
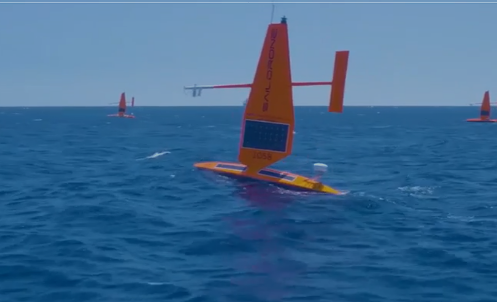
Saildrone’s autonomous research vessel (Photo: Saildrone)
Other types of vessels collect ocean and seafloor data. The environmentally friendly Saildrone can operate independently — we could say autonomously — for more than a year. The Saildrone company, based in Alameda, California, contracts out its USVs, providing its technology to agencies and governments and taking on the risks of ocean surveying to acquire valuable data. Saidrones are equipped with satellite communications, GNSS navigation, weather sensors and sub-surface sensors.
Wheels on the road
Autonomy applications on land are dominated by commercial self-driving cars, Tesla being the leading manufacturer in the U.S. However, full autonomy is still a considerable way from being ready. At the full-autonomy level, known as Level 6 in the auto industry, the vehicle does all the driving, including obstacle avoidance, under all conditions, without any geographic limitation. Nevertheless, we appear to have progressed from basic manual control (Level 0) to somewhere around Level 3, where the vehicle is largely aware of its environment, and does most of the driving. Even so, human monitoring and control are still required.
Tesla’s autopilot technology in its Model S and Model X electric vehicles could be referred to as an advanced driver assistance system — or as Tesla calls it, “Full Self-Driving (Supervised)” — and is reported to handle emergency steering and braking, autonomous steering, lane changing, vehicle following, curve negotiation, and automatic parking. Autopilot sensor inputs are provided by 12 ultrasonic sensors and eight cameras providing a 360° field of view.
Tesla Autopilot intelligence can identify more than 250 traffic signs 50 countries, including turn signs and speed limits. It can identify and interpret traffic lights and road markings, and decide what to do when coming across things such as traffic cones and pedestrians.
Nevertheless, Tesla’s have been involved in quite a few accidents, the cause of which has been analyzed to be mostly a lack of driver attention (supervision), and in a number of cases, a failure of the autonomous system to recognize unusual road conditions.
Another company, Leo Drive, specializes in providing scalable software and hardware solutions, offering an end-to-end, one-stop service for integration of autonomous systems. Its mission is to make autonomous technology more accessible and widely adopted across various industries.
For its autonomous test vehicle, Leo Drive is using the Ellipse-D, a dual-antenna RTK inertial navigation system (INS) from SBG Systems. The company chose the Ellipse-D for its accuracy, reliability, and advanced features — all essential for autonomous vehicle development and testing. The Ellipse-D INS was integrated into Leo Drive’s, a passenger car converted for autonomous operations.
Oshkosh Defense integrated autonomous technology onto Palletized Load System vehicles as part of the Expedient Leader Follower program. Photo: Oshkosh Defense
The U.S. Army has been using automation in its weapon systems for some time. How much autonomous behavior, of which these systems are truly capable, may be difficult to determine. The General Atomics Reaper unmanned aerial vehicle (UAV) is largely controlled over long-distance satellite links by operators in control stations. It’s possible that the same set up is true of most of the Army’s automated weapons — probably motivated by the need to avoid systems independently determining their own targets and firing without human confirmation.
It’s difficult to determine just what army programs are underway, other than to acknowledge that programs have been launched in the past. There doesn’t appear to be any open, clear indication of the degree of autonomy to be included. A couple of programs have produced at least visible hardware, but how much or little human control is involved is unclear.
Taking flight
Up in the air, new autonomy contender Mayman Aerospace is offering the Razor, a jet-powered vertical take-off and landing (VTOL) UAV. Development of Razor is funded by private investment and U.S. Department of Defense contracts.
The RAZOR VTOL with gimbled jet pods passed tests at a military base in California in September 2024. Photo: Mayman Aerospace
Razor is imbued with a degree of AI that enables autonomous decision-making, as well as navigation. Its autonomous AI brain — the SkyField flight-control system — navigates independently in a GPS-denied environment, possibly involving ground beacons and eventually integrating with battlefield management systems. With a 5- to 6-foot-long airframe and sculpted shape, the aircraft presents a low radar cross section and has a degree of stealth to assist in the penetration of enemy defenses. Its top speed of 500 mph provides new options for both military and commercial applications, according to Mayman.
Razor also can aid disaster recovery, rescue operations, and the delivery of urgently needed life-saving cargo.
Many VTOL unmanned aircraft have struggled with the transition from vertical to horizontal flight. On its first vertical lift-off and climb-out on four jet engines, Razor paused briefly at altitude. Then its jet pods tilted slightly toward horizontal before the aircraft went directly into horizontal flight. An earlier flying testbed may have assisted the development of transition software, perhaps with a boost from machine learning.
Designed for deliveries, the EHang 216 heavy cargo, 16-rotor unmanned aircraft can carry a payload of 551 pounds over almost 22 miles with a top speed of 80 mph, according to the EHang company. The UAV is fully autonomously operated while being monitored over a 4G/5G data link at a manned control center. The system has an automatic fail-safe mode in which the UAV will return to base if the communications link goes down or if battery power drops too low.
EHang also uses a redundant design, with two GPS receivers and double rotors, ensuring a low likelihood of failure during a delivery run.
More In development
So while land vehicle autonomy is moving forward — with Tesla cars and Army vehicles that apparently can take control with close human monitoring — we still have some distance to go to achieve fully independent autonomous behavior on the road.
The Ehang 216 heavy-cargo UAV EHang 216L is designed for deliveries, including life-saving ones. Photo: Ehang video screenshot
Autonomous applications on the sea are more common, with U.S. Navy applications showing substantial progress. Still, precise navigation in crowded harbors remains under human control. Humans are still watching and monitoring, ready to intervene should military or commercial UAV applications make untoward execution errors.
We will continue to follow developments of significant autonomy programs such as the U.S. Air Force Collaborative Combat Aircraft (CCA), a new type of uncrewed weapon system. The CCA and other programs are maintaining high investment levels, so it’s possible that we may see full autonomy fielded quite soon. Perhaps then our belief in its capability will become fully justified.
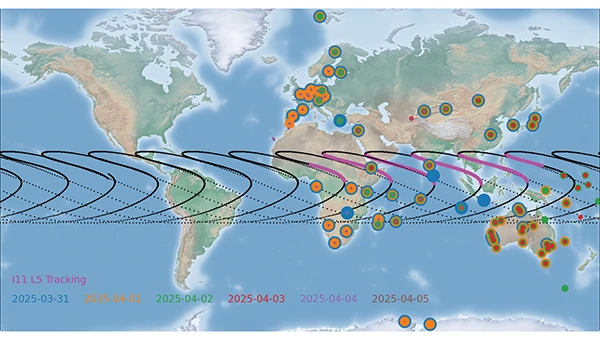
NVS-02 is a second-generation navigation satellite of the Indian regional navigation satellite system NavIC. It was launched on Jan. 28, 2025, but could not reach its designated orbit due to a malfunction of a valve of the thrusters. Thus, the satellite is still in its transfer orbit. As of April 2025, the NVS-02 perigee is about 190 km, whereas the apogee is 37,400 km above the Earth’s surface. The inclination is about 21° and the eccentricity is 0.74. The groundtrack of NVS-02 is illustrated in Figure 1 and currently has a repeat cycle of about six days.
As of today, starting on Feb. 19, 2025, a decent number of receivers of the International GNSS Service are tracking the L5 signal of NVS-02 with the pseudo-random noise number I11. The L5 tracking of dedicated stations on individual days is indicated by different colors in Figure 1. Although the groundtrack has global coverage, no stations in Northern and Southern America have tracked I11 so far. The tracking is limited to periods when the satellite is near the apogee with altitudes between 23,000 km and 37,400 km and visible from the Indian Ocean region. During these periods, indicated in pink in Figure 1, the transmitter is active and the antenna is roughly pointing toward Earth.
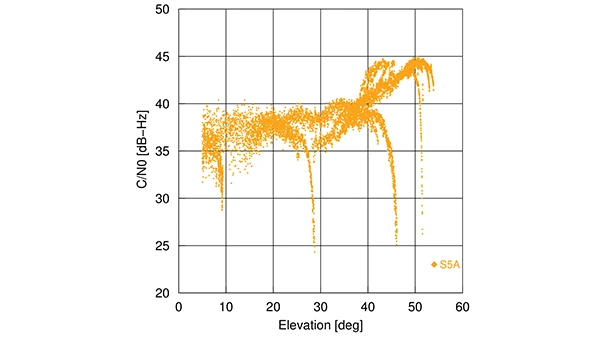
Figure 2 shows the carrier-to-noise density ratio (C/N0) of the NVS-02 L5 signal tracked by a Septentrio PolaRx5 receiver at the German Space Operations Center (GSOC) of the German Aerospace Center (DLR) in Oberpfaffenhofen, Germany. Sudden drops in the C/N0 occur at about 8°, 28°, 46° and 52°. Here, the line of sight to the satellite is at the edge of the transmit antenna main lobe with a significantly lower gain, introducing the drop in signal power and, finally, the loss of lock.
Figure 2: Elevation-dependence of the carrier-to-noise density ratio of the NVS-02 L5 signal at Oberpfaffenhofen, Germany. (All figures provided by the authors)
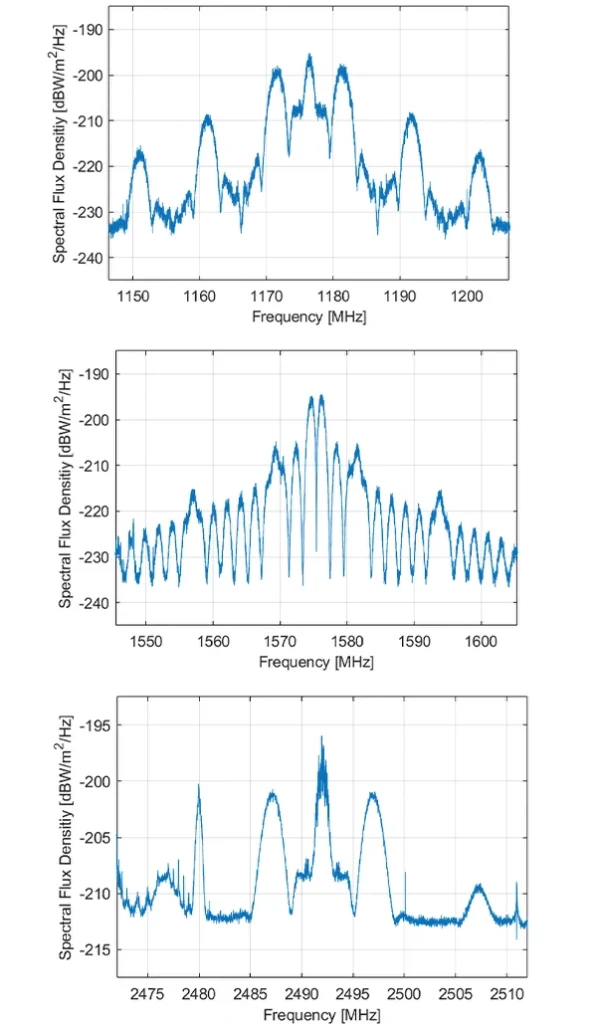
The spectral flux density of NVS-02 in the L5, L1 and S band is shown in Figure 3. The L-band spectra have been measured with GSOC’s 30 m high-gain antenna in Weilheim, Germany. As the feed of this antenna is limited to the L band, the S band spectrum has been recorded with a 5 m dish antenna of DLR’s Institute of Communication and Navigation.
Figure 3: Spectral flux density of NVS-02 in the L5 (top), L1 (middle) and S band (bottom). (All figures provided by the authors)
The peak in the L5 spectrum at the center frequency of 1176.45 MHz is related to the civil Standard Positioning Service and introduced by a Binary Phase Shift Keying (BPSK) modulation with 1 MHz bandwidth. The two broader peaks with an offset of 5 MHz from the center frequency are caused by a Binary Offset Carrier (BOC) signal of the Restricted Service with a bandwidth of 2 MHz. Sidelobes of that signal are visible at the center frequency ±15 MHz and ±25 MHz.
For the L1 band, a Synthesized Binary Offset Carrier (SBOC) is used. It consists of two BOC signals with 1 MHz bandwidth and offsets of 1 MHz and 6 MHz, respectively. The two mainlobes of the BOC (1,1) component are visible at 1575.42±1 MHz, and the mainlobes of the BOC (6,1) component at 1569 MHz and 1581 MHz. The same type of signals, as in L5, are transmitted on the S band carrier with a center frequency of 2492.028 MHz. Due to its different location in a less remote area, compared to the 30 m antenna in Weilheim, the 5 m antenna in Oberpfaffenhofen suffers from pronounced interference with other signals in the S band; the most prominent peak can be seen at 2480 MHz, several smaller and sharper peaks over the whole frequency range shown in the lower plot of Figure 3. Possible causes of these interferences are WiFi and civilian and military radiocommunication services.
Although NVS-02’s mean orbit height is steadily decreasing due to the atmospheric drag around the perigee, the satellite will stay in orbit for at least a decade. However, navigation signal transmission might stop at any time due to operational constraints or unfavorable conditions in the non-nominal orbit.
Merriam-Webster defines a “silver bullet” as a magical weapon, one that instantly solves a long-standing problem. Well, it’s been about 30 years. Despite studies, analyses, tests, demonstrations and much hand-wringing, no silver bullet technology has been identified to back up the myriad GPS dependencies that now permeate U.S. critical infrastructure (CI).
The President, members of Congress, Deputy Secretaries and the President’s National Space-Based PNT Advisory Board have all weighed in to insist that such a backup be put in place to preserve the operational continuity of domestic CI, all to no avail. As a participant in or observer of virtually all these efforts over the past 20 years, I am as familiar with and frustrated as anyone by the lack of progress or urgency.
Now, the Federal Communications Commission (FCC) is the latest to join the fray in late March with a public hearing preceded by a Notice of Inquiry (NOI) on Promoting the Development of PNT Technologies and Solutions, as well as a separate but related Notice of Proposed Rulemaking on improving wireless E911 location accuracy. As with many of the preceding efforts, the NOI is comprehensive and seems all-inclusive regarding both technologies and governance, and it is timely, as it follows many recent press reports on both GPS and CI vulnerabilities. One can hope that its findings will be compelling and capable of implementation, though the sheer range of responses it invites in light of numerous recent industry initiatives for PNT services may only confuse the situation further.
The NOI reflects the recent marketing of PNT services to the government by NextNav, the National Association of Broadcasters (NAB), various commercial SATCOM providers and others. NextNav proposes a commercial PNT service, potentially in conjunction with cellular communications providers, and the NAB proposes a Broadcast Positioning System (BPS) that would include PNT information with television signals using a proposed new broadcast standard. Both entities have separately petitioned the FCC for consideration of rulemaking changes to facilitate their planned solutions. However, their proposals highlight the confusion that can be created by commercial interests that do not take account of some fundamental differences between PNT and communications services.
PNT services have unique requirements for coverage, availability, continuity, integrity and time management that differ from those for communications services, and which dictate how PNT services are provided and employed, particularly when nationwide service is required. This is not to say that the noted PNT initiatives involving market-focused communications providers should not be considered as viable complements to space-based GPS service. However, a viable backup to GPS must be able to provide service in rural and remote portions of the country, where commercial markets are lacking and robust commercial services are not available.
There are significant differences among civil and military PNT service requirements. The Department of Defense (DOD) recognized the reality of this common variation in services, and in its 2019 Department of Defense PNT Enterprise Strategy envisioned a multi-layered PNT architecture consisting of global, regional and local sources of PNT information to support U.S. and allied military systems worldwide. The global PNT layer is space-based and ubiquitous, with 3D position and precise time available worldwide. The regional PNT layer may be space-based or terrestrial with national or international coverage where PNT resiliency must be assured. The local layer may be space-based, terrestrial, and/or autonomous using manmade and natural PNT sources over a limited area based on source design and performance.
In proposing to back up GPS use in domestic CI, both NextNav and the proposed BPS seem to be positioning themselves to serve as the regional layer for the entire country, though both are fundamentally focused on urban markets. NextNav proposes PNT services in urban areas using a network of beacons, potentially partnering with cell phone service providers to provide broader reach, primarily for timing. NextNav also offers a special precise vertical location service for first responders in select metro areas.
The BPS proposal envisions mesh networks of television broadcast antennas, where one TV station is the lead for timing and provides a timing signal to other (follower) stations in a metro area. The PNT information (time, tower location) is contained in a small portion of each main TV broadcast message frame. In effect, it is a new instantiation of a technology demonstrated in 2008 by Naval Academy Midshipman David Taweel in collaboration with Johns Hopkins APL. Using time-managed TV transmissions in Washington and Baltimore, he designed and executed a closed-course UAV flight profile to demonstrate use of signals of opportunity (SOO) for navigation in the absence of GPS. In the same period, a company called Rosum briefly marketed similar PNT services using TV and other SOO transmissions. The technology was stymied by the lack of a nationwide broadcast standard for time-synchronized TV transmissions, which are essential to enable receivers to calculate PNT solutions. This is apparently still a problem today, as the NAB petition to the FCC requests that the latter mandate adoption by TV broadcasters of a new standard that will enable the BPS signal but will also require changes to TV sets and converter boxes. The end user market for a TV-based service is undefined, as is the willingness of station operators nationwide to accept a new standard.
Both NextNav and BPS technologies have performed well within structured demonstrations conducted independently and by the government, and I don’t doubt their technical viability as local layer complements to GPS, particularly for timing. However, as complete backups to GPS positioning and timing services nationwide, issues of adding necessary infrastructure and coordinating precise time management among the range of broadcast system partners and cell network providers become cost prohibitive to serve remote and rural areas where relevant markets don’t exist. Also, TV towers, are sited to provide optimum reception of TV signals in their service areas but not to optimize geometric separation among them that is necessary for positioning services, particularly beyond the margins of metro areas. Finally, neither provider would be able to back up GPS in supporting national security and economic activities in the Alaskan Arctic region and over the northern ocean areas abutting the United States and Canada, where GPS may realistically be threatened in the face of growing competition from U.S. adversaries.
In that context, and with respect to all the studies assessing GPS backups, NextNav stated in an FCC filing, “No one else has proposed a credible solution to the widely recognized and increasingly urgent problem that the United States has no wide-scale [terrestrial PNT] service to complement and back up GPS where the GPS signal is obstructed or when outages occur.”
This is simply not correct, as government studies over years have identified enhanced Loran (eLoran) as the most viable and affordable backup to GPS, and eLoran remains the only terrestrial PNT service that can efficiently back up GPS nationwide, including the Alaskan Arctic and northern oceans. However, since 2015, and despite Congressional support, deliberate political resistance within OMB and resulting DOT/DHS inaction and attempts to shift responsibility to industry have allowed much of the legacy Loran infrastructure to degrade. Costs have risen, and the government is now considering selling the system off, losing access to the valuable sites where eLoran transmissions would be most useful to back up civil GPS use. At the same time, our adversaries in Russia, China and (reportedly) Iran, continue to build out eLoran networks of their own to back up their use of space-based PNT services.
Unless our government accepts responsibility, there will be no PNT silver bullet for domestic CI. Experience shows that industry will not solve this problem alone.