Geodata is key to the digital future and a 4.0 business world, according to a new report released at InterGeo in Hamburg, Germany. At the heart of this business vision is the networking of sensors that must have location data in order to fulfill their value.
The 116-page Intergeo Report, in parallel German and English, includes sections on smart cities, public participation, autonomous driving with live mapping, and surveying on the open seas. An eight-page GNSS Update section features CEOs answering questions market focus of their GNSS products, the role of geo-referencing in the Internet of Things, the coming-of-age of precise point positioning (PPP), and the opportunities for GNSS opened up by autonomous driving.
Access to company-specific geodata offers managers in the automotive industry a competitive ad- vantage. Apps show today’s motorists the way to the nearest electrical charging station. Soon, the same motorists will talk to their on-board computer to find a parking space. It will guide them instantly to the nearest free space. Geoinformation will then no longer just be found in the satnav but also in the integrated sensor in the road paving infrastructure and in the status reports of other road users.
Networking Everything. The Internet of Things is taking shape and permeating all areas of life. At its center are the tiny pieces of information that assign coordinates to a parking space, a loading berth for a container ship, a screw in the shelves of a supplier’s warehouse, or the alarm system of a family home. Degrees, minutes and seconds show people the way, answer a range of questions and help make informed decisions. Geoinformation is both an asset and an essential source of information.
Content Is King. Key companies in the geoinformation sector have naturally taken onboard the value of geoinformation. It forms the basis of their business activities. The use of geodata as added value for their products is still very new. Esri realized early in the sector that selling software is no longer sufficient on its own. Only data enables customers to harness the value of products. Cloud solutions store the mountains of data, while platforms deliver the answers.
Such new business leading lights as AirBnB, Uber, Facebook and Google could not survive without geoinformation. It is part of increasingly intelligent systems that make users’ lives a little easier and more comfortable, optimizing processes and enabling people to operate and participate in ways that were previously impractical or impossible.
The examples are myriad. Consider just a few. Digitally aided planning and construction in building information modeling not only streamlines processes and reduces costs, it enables public participation in planning procedures, using digital models of planned reality. Aerial surveys and data gathering by UAV, not only for traditional survey needs but for growing requirements in natural resource planning and management, infrastructure inspection and maintenance, surveillance and security, and more. Guidance systems for the blind.
All require location data. GNSS (satnav) is the core supplier of this data, but must be augmented by other technologies in special environments.
Releasing Geodata Pays Dividends. Managers of geodata realize they need to release it in order for it to lead them to “more” – more value, more benefits, more transparency, more importance. Geoinformation and digitization are inextricably interlinked, and this is just the beginning.
Back in September at the Institute of Navigation GNSS+ convention in Tampa, Florida, one of the papers went a long way to explaining why and how more GNSS satellites in more constellations is better. The natural assumption is that because there are more satellites, a multi-constellation receiver can choose which ones have the best signal and which provide the best solution — and it’s not always the same satellites.
Best geometry together with best signal strength obviously provide the best solution, but this might change in, for instance, a downtown urban setting for a car using a satellite navigation system. While most Western car-nav systems use only GPS, the study by Martin Escher, Mirko Stanisak, and Ulf Bestmann at the Institute of Flight Guidance, Technical University in Braunschweig, Germany, clearly shows that there is an advantage to embedding multi-constellation receivers in these systems.
Skyplot of GPS, GLONASS, Galileo and BeiDou satellites at Braunschweig.
The above skyplot shows a perfect reception of all GNSS satellites during a period of 14 hours — 30 usable satellites — obtained with a high-quality antenna without any obstacles. Car driving downtown will almost never encounter such good GNSS reception.
The Technical University put two different receivers in a car under static, representative, urban conditions, and went about evaluating reception against that predicted by an in-house simulation. The high-precision survey-grade receiver receiver tracked signals from all four constellations, while a lower cost receiver used in some car-nav systems was configured to only track GPS and Beidou. In this scenario, valid signals were obscured by surrounding buildings and the total number of visible satellites was reduced from 23-30 to 11-18.
The measurements validated the university simulation model and demonstrated how the high-precision receiver was able to remove multipath and other diffracted or reflected signals, while the lower cost receiver collected all available signals and therefore suffered some accuracy degradation.
Braunschweig urban scenario.Predicted satellites reception with an elevation of up to 65 degrees often obstructed by buildings.
The area chosen for this demonstration is dominated by narrow roads with multi-story buildings on both sides of the road. To begin, only GPS positioning was used on the test route — representing the current state-of-the-art for most production car-nav systems. For large portions of the test drive, no GPS-only position solution was achieved because of insufficient GPS measurements.
While there was some improvement in tracking using a multi-constellation receiver, when GNSS differential corrections over a mobile telecom link were incorporated, tracking performance was significantly improved. But when inertial and wheel sensors were also added into the solution, almost perfect positioning was achieved over the whole route.
Multi-constellation with differential corrections and sensor aiding.
Given that commercial GPS/GLONASS corrections are now available almost everywhere over a large portion of the globe and some assisted GNSS services are beginning to add both Galileo and Beidou corrections, it’s possible that downtown loss of signal for car drivers may soon be a thing of the past. And, of course, many car-nav systems currently incorporate wheel sensor inputs for dead-reckoning when GNSS is lost.
Drone use in difficult locations
Another interesting ION GNSS 2015 paper from Adam Schultz, Russell Gilabert, and Maarten Uijt de Haag of The Ohio University details the way a couple of students and their professor set out to fly a drone down corridors and within the halls of the Engineering Department. They are hoping to soon get access to the extensive maintenance tunnel system at Ohio University for more autonomous flights using newer, smaller drones.
The objective is to investigate the requirements and use of drones for missions in remote or difficult locations for applications such as large building maintenance, search and rescue, and indoor mapping.
But watch out, people in the Engineering building, if you see an unmanned hex-copter heading toward you on your way to class! Sounds like great fun as the UAV research students see the shots of the scattering inhabitants via the onboard Point Grey FireFly MV color camera!
The UAV/drone is equipped with a navigation and mapping system for both outdoor and indoor environments, using multiple laser scanners, an inertial measurement unit (IMU), barometric height and GNSS, whenever its available.
The UAV is a 3DRobotics hex-copter with a payload that includes an onboard processor, two short-range and one long-range laser range scanners, autopilot, Xsense MTI IMU, GPS receiver and a standard Wi-Fi link to relay real-time maps, trajectories and video to the remote operator.
Ohio U Hex-copter with similar payload as flown through indoor environment (speed ~2m/s).
Guidance, navigation and control (GNC) of the unmanned hex-copter is accomplished by tactical and strategic modules. In known environments, the strategic GNC keeps track of the planned and actual flight trajectories and provides the next waypoints for the mission.
In unknown environments, the strategic GNC maintains a rough estimate of trajectory and the current map of the UAV’s location. The UAV can be flown either manually by the student managing the flight controller or, when in autonomous mode, by the internal UAV flight control computer. Laser scanners provide horizontal position estimation and altitude estimation, while also collecting mapping data.
The mission manager is programmed with a simple rule-based system that uses the system’s 2D and 3D maps to control the route. The drone flies autonomously through the corridors and rooms, while the UAS operator monitors progress on a laptop. The operator can manually take control of the UAV guidance at any time.
The autopilot provides magnetometer and inertial measurements that are used to loosely maintain heading when moving from outdoors to indoors. When indoors, the lidar, inertial and optical (LION) mission controller continuously outputs position and orientation and generates short 10-30 second trajectories for the flight controller — providing a series of waypoints and required velocities for the UAV to follow.
Map generated by the UAV mission controller (red) versus truth reference map (blue).
Should this research ultimately lead to a commercial UAV implementation, it sure would help solve the huge problem we have now for generating indoor maps. The current simultaneous localization and mapping (SLAM) method for generating these indoor maps usually means somebody walks throughout a mall or office building carrying one of several indoor location systems or even taking physical measurements. If a very small UAV were to be flown safely throughout such an indoor location, data would be collected quickly, hopefully with a lot less effort than current methods allow. There’s still a lot of research and development required, but this sure does look promising.
Tony Murfin
GNSS Aerospace
References
“Future Automotive GNSS Positioning in Urban Scenarios,” Martin Escher, Mirko Stanisak, Ulf Bestmann, ION GNSS+ 2015.
“Indoor Flight Demonstration Results of an Autonomous Multi-copter using Multiple Laser Inertial Navigation,” Adam Schultz, Russell Gilabert, and Maarten Uijt de Haag, ION GNSS+ 2015.
STMicroelectronics is bringing next-generation satellite navigation to today’s drivers with the launch of enhanced, always-available, always-accurate 3D positioning on its TESEO III automotive-navigation integrated circuits (ICs).
The new TESEO DRAW firmware for ST’s multi-constellation positioning chips enables navigation devices to provide continuous, accurate location and turn-by-turn instructions even when satellite signals are poor or unavailable, such as in tunnels, covered car parks, or multi-level highways. TESEO DRAW also enhances performance in built-up areas, such as in urban canyons, where conventional navigation systems can lose accuracy.
TESEO DRAW merges the satellite information with data from vehicle sensors such as the gyroscope, accelerometer and wheel-speed sensors, to calculate location accurately in three dimensions including elevation. If the satellite signal is poor, TESEO DRAW compensates for the loss of accuracy, and if the signal becomes unavailable, navigation continues uninterrupted based on calculated location (dead reckoning). Road tests carried out by ST in difficult under-cover and urban environments have demonstrated continuous tracking from entry to exit in complex multi-level car parks, and at street level between tall buildings, where conventional systems have been unable to track the vehicle.
By enabling high-accuracy 3D dead reckoning, TESEO DRAW expands the opportunities for developers to commercialize new applications, the company said.
“TESEO DRAW strengthens GNSS performance and eliminates barriers to continuity, enabling exciting new services to emerge,” said Fabio Marchiò, Microcontroller and Infotainment Division general manager, Automotive Product Group, STMicroelectronics. “Users can also experience significant improvements in existing services such as fleet tracking, eCall, or ERA-GLONASS emergency response, usage-based insurance, road tolling, and anti-theft systems.”
TESEO DRAW firmware has multiple modes and is capable of referring to sensors on the vehicle’s CAN bus or discrete sensors such as the odometer, reverse sensor, MEMS accelerometer and gyroscope, or MEMS inertial module connected to the TESEO III IC.
ST is a supplier of MEMS motion sensors for automotive navigation, telematics and vehicle alarm systems, and is a provider of navigation engines with its TESEO IC family. With the launch of TESEO DRAW firmware, ST is able to provide a unified platform comprising navigation engines, 3D positioning capability and motion sensors.
TESEO III ICs loaded with the new TESEO DRAW firmware are sampling now, and will enter mass production in Q1 2016.
The ION GNSS+ 2015 Conference once again fielded a jam-packed agenda of papers on subjects from world-wide constellation updates, through GNSS integrity, indoor navigation demonstrations, multi-constellation/function chipsets, interference mitigation and jamming detection, privacy issues, and many other very interesting subjects. That’s GNSS+ in the conference name, as in “plus,” denoting the many other positioning, navigation, and timing technologies it covers.
Most papers contained advanced academic research, but there were also several new industrial releases. This year ION divided and clearly differentiated sessions between “System and Application Tracks,” that is, those with more direct industry content, and “Peer-Reviewed Tracks,” the so-called “pure” research.
As always, some of the most valuable takeaways of attending ION come from the numerous unrelated, off-the-record corridor conversations: an essential element, always spontaneous and much anticipated, but something that cannot be clearly identified nor put into the program.
The conference seemed to have around the same number attendees as last year with about the same number of exhibitors, even though a few of the big booths were missing. Paradoxically, some exhibitors privately said they did better and more business this year, even with fewer attendees, according to their estimates.
SPIRIT Navigation from Moscow did not have a booth, but Ruslan Budnik made sure to fill my notepad with lots about their technology, products and initiatives. They are among several companies working to add indoor navigation capability to smartphones, using existing onboard sensors and new intelligent software. Their solution concurrently uses multiple technologies including geomagnetic fingerprinting, pedestrian dead reckoning, and map matching, but does not rely on an installed beacon infrastructure. A Spirit app allows store operators to quickly map Wi-Fi and Bluetooth signals and collect a Magnetic field map which matches the floor plan of the store’s venue. Spirit claims an accuracy of around 1 meter, which Ruslan proceeded to demonstrate to me in the corridors around the ION meeting rooms.
Theplenary session on Tuesday night was very interesting with a presentation on the results of NASA’s planetary exploration over the last several decades, by Dr. James Green, NASA Director or Planetary Science. I learned a lot about our solar system; much more out there than one suspects, and much to be revealed in the next few years!
GPS World editor Alan Cameron once again led a preview of the planned sessions for the week, with each session chair constrained to a 5-minute rapid-fire presentation aimed at enticing as many attendees as possible. Interesting and somewhat humorous at the same time; we still got a flavor of what was to come in each track.
On Wednesday I was fortunate to be able to interview several show exhibitors. Some of these you will also find in video footage on the magazine’s website, speaking to you straight from the show floor.
Skydel is a relatively new exhibitor, working with Averna, both from Montreal, Canada. Averna makes signal analysis hardware on which Skydel installs software-based simulation of GNSS signals. Skydel’s objective is to be able to make their solution so affordable that every engineer could have one of these record and playback simulators on their desk, rather than having to schedule time on a central, shared multi-function simulator. An exciting new-entry product developed by an energetic group of people with a high level of ingenuity; hopefully they will succeed.
DLR antenna prototypes
A robust receiver initiative from Deutsche Zentrum für Luft- und Raumfahrt (DLR), the German Aerospace Center, aims to demonstrate that jamming and interference detection and mitigation can be achieved much more effectively than just at the RF level. Their processing goes deeper with such features as knowing that a source from a particular direction isn’t aligned with the current constellation, so it’s a jamming/interference suspect. Their conformal antenna development attempts to meld an antenna configuration with their signal processing capabilities. DLR is looking for partners to put these developments into commercial receiver applications.
ComNav has a new K700 family of receivers: K-700 GPS L1, Beidou B1 and Glonass L1 80 channel receiver — added to their K-708 dual frequency 198-channel dual-frequency version. The M300 Pro GNSS Receiver package includes a weather-hardened package, multiple interfaces which enable remote internet control and data access, memory and a rechargeable back-up power supply. ComNav claim the M300 Pro has been selected for the Chinese CORS network. ComNav also anticipates a name change in the near future: SinoGNSS will be their new company name.
Harxon antennas and radiosUnicore UB370 Beidou/GPS/Glonass multi-frequency OEM receiver
Harxon gave us an overview of their wide range of antenna and radio products, while Unicore in the next booth described their single and dual frequency receivers which they are now promoting extensively in North America.
NovAtel GAJT antijam systems
As usual, NovAtel had a wide range of products on display. I was impressed that the mil-spec GAJT anti-jam product-line has now undergone testing by both the U.S. and Canadian military, and that the GAJT-AE is now flying and providing guidance protection in hostile jamming environments. Once again there were mentions of NovAtel receivers and antennas being used for research in several technical papers at the conference.
Septentrio continues to make further inroads into the high-precision GNSS receiver market, and announced several new key initiatives. The company has been selected by UNAVCO as the Geodesy Advancing Geosciences and EarthScope (GAGE) facility preferred vendor for next-generation GNSS reference station products. UNAVCO ( ) is a non-profit university-governed consortium, facilitating geoscience research and education using geodesy.
AsteRx-U dual antenna receiver
Septentrio is developing a next-generation reference receiver with UNAVCO’s inputs and evaluation feedback for the purpose of upgrading and renewing their GNSS networks. Septentrio also launched the AsteRx-U and the AsteRx-U Marine multi-constellation dual antenna receivers which incorporate the latest GNSS tracking and positioning algorithms and interference mitigation along with integrated UHF radio, Wi-Fi, USB, Bluetooth, cellular connectivity, and a spectrum analyzer which provides users with their interference profile.
Indoor Navigation
ION’s annual Indoor Navigation Demo session on Wednesday afternoon turned out to have more slides and pre-recorded testing content than actual demonstrations. The participants included Nokia HERE, Rx Networks, SPIRIT Navigation, TRX Systems, Broadcom, Indoors and Combain.
HERE was able to initially demonstrate some indoor tracking of an equipped cellphone, but the display for the audience appeared to quit after a short period. They did provide a link to allow attendees to download their software and try it for themselves.
Rx Networks is apparently focusing on self-location for indoor guidance assets, and ran a pre-recorded demo of ‘Zed’ in a Vancouver Mall – but the vertical tracking display part of the video was completely washed out for the audience.
SPIRIT Navigation ran a recording of the demo I had witnessed earlier – a quite effective, working indoor nav application on a smartphone – and then walked around the demo room, but wasn’t able to show real-time results.
TRX Systems ran a very effective real-time demo and was able to show the audience the path of their ‘walker’ as he meandered around the Conference Center, changed levels and eventually returned on cue to the demo room. They use crowd sourcing to build an initial map which then constrains sensor data from standard sensors, similar to several other presenters. This appeared to be the winning demonstration for this year’s indoor nav demo. We did hear later that they were not using sensors within the smartphone, rather a separate TRX device attached to the belt or the ‘walker’.
Broadcom ran an effective demo, albeit with considerable lag between actual and displayed position and frequent jumps between points, presumably due to the same delay problem. This was attributed to the display system used to present to the audience. They also ran a second short in-room demo which was more effective and more real-time, but apparently not as accurate as TRX from the displayed results.
Indoors also use ‘radio’ fingerprinting with GNSS data as a back-up, and Wi-Fi, BLE, magnetic and inertial data fusion along with dead-reckoning. Their recorded demo was quite effective.
Combain has a system which is required to be world-wide interoperable for machine-to-machine asset location, so they are focused on using cell and Wi-Fi IDs for navigation, with databases containing 64 million Cell IDs and 726 million Wi-Fi location IDs. They claimed accuracies of 200 meters for urban areas and 40 meters for rural. These accuracies are not suitable for indoor location so no demonstration was provided.
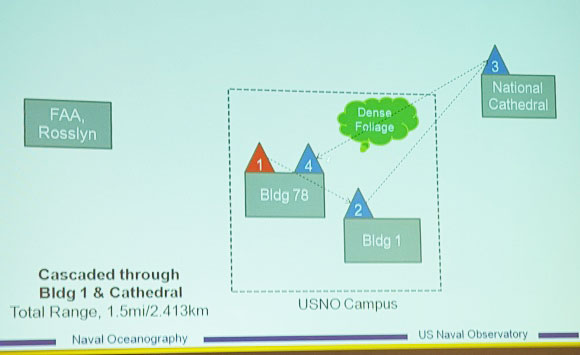
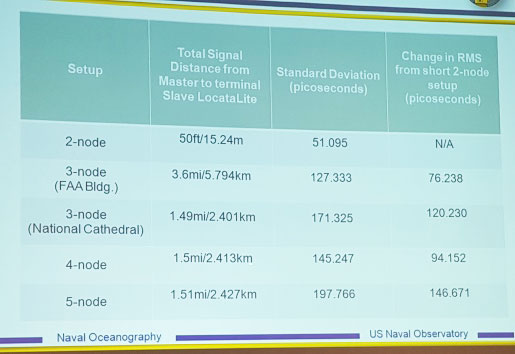
Pico-second test results (Click on the image to enlarge it.)Pico-second test results
Later, I managed to catch a paper which Locata had recommended, which involved a number of Locata networks used by the U.S. Naval Observatory to demonstrate time and frequency transfer using the USNO Time Standard, with some highly accurate results: picoseconds! This paper forms the basis of GPS World magazine’s October cover story, providing more on these significant time-transfer and synchronization findings.
GRIFFIN Central Processor & Node Antenna Electronic Units
Another significant paper was presented in the Interference & Spectrum issues track. GPSat Systems Australia has been working for some time to implement a jammer/interference detection and localization system. The GRIFFIN 1000 system uses both Angle of Arrival (AoA) and Time Difference of Arrival (TDOA) to locate interference sources. GPSat claims that RF interference source in the GPS L1 band can be detected and geo-located to accuracies of a few meters within a few seconds. The system is already in production, with final production field testing underway, and customer deliveries scheduled for November.
Multi Element Antenna Array and Node Electronics
As ION GNSS+ came to a close for another year, it appears that this GNSS-centric conference is weathering the industry’s apparent preference for other sector shows which may draw new paying customers. ION’s academic/technical content was top-notch as usual, unparalleled anywhere, with attendees flocking to the papers, while existing customers still found comfort in meeting their suppliers on the show floor and around the corridors of the Conference Center. The formula still seems to work for now, but the apparent feeling on the floor was that better exhibitor payback may be found elsewhere, and that this could reduce ION participants in future years. Hopefully not, since this was a very good week for everyone with whom I talked.
Garmin International Inc. has expanded its partnership with Honda Motors to provide the infotainment systems in new-model Hondas with Garmin’s navigation system. The latest vehicle platform to launch with Garmin and its navigation solution is the all-new Honda Pilot.
“We are delighted to expand our esteemed partnership with Honda across multiple new vehicle platforms, bringing our navigation expertise to their customers via an integrated system that is feature-packed and easy to use,” said Matt Munn, Garmin managing director of automotive OEM. “This growing partnership is a testament to the reliability and quality of our navigation solutions and we are honored by Honda’s continued confidence in Garmin.”
The Garmin system integrates seamlessly into Honda infotainment consoles. Preloaded maps allow users to navigate through areas that lack cell reception, while millions of points of interest make it easy to find existing or new locations, Garmin said.
Spoken turn-by-turn directions are enhanced with advanced guidance features to navigate drivers through challenging and rigorous circumstances. Lane guidance indicates the proper lane for a driver to make a turn, and photoReal junction view provides photo-realistic images of junctions and exits. The system also includes real-time traffic avoidance, speed limit display, 3D buildings, terrain views and more.
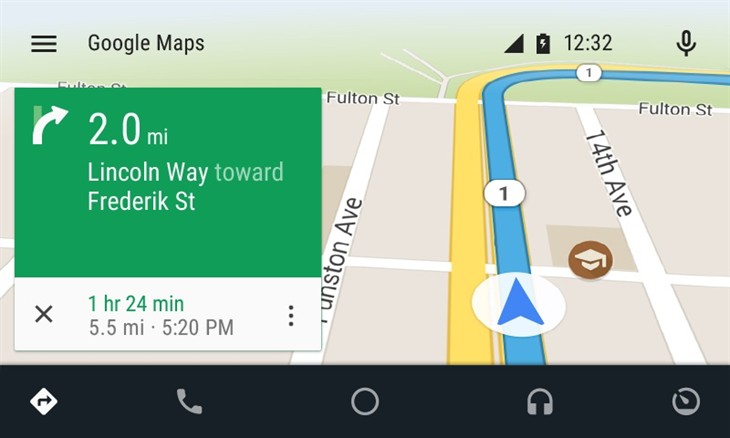
Android Auto in the 2015 Hyundai Sonata. (Photo: Hyundai)
Hyundai has become the first car company to launch Android Auto on production vehicles. Android Auto is premiering on the 2015 Sonata with Navigation at dealerships nationwide, and will later become available on other Hyundai models.
“Android Auto aligns with Hyundai’s core interior design principles of safety, intuitiveness and simplicity,” said Dave Zuchowski, president and CEO, Hyundai Motor America. “We launched this highly anticipated feature on our best-selling Sonata, adding to our promise of value. With the launch of Android Auto, we provide more owners with the experience of cutting-edge technology.”
Android Auto not only brings a high technology experience to Hyundai owners, but also improves safety, Hyundai said. For example, at any given daylight moment across America, approximately 660,000 drivers are using cell phones or manipulating electronic devices while driving, a number that has held steady since 2010. Android Auto helps keep drivers’ eyes and attention on the road by integrating the advanced driving-related functions of the user’s smartphone with the familiar centralized screen, physical controls and microphone of their car.
Furthermore, the smartphone’s screen becomes “locked,” so drivers are not tempted to look down and interact with their phones directly while Android Auto is in use.
Hyundai lists these advantages to Android Auto:
The Google Now card-based experience provides suggested locations and travel times based on the user’s searches, calendar entries and home and office locations, as well as weather information and “now playing” information for music streamed via the phone
App software (navigation, streaming music, etc.) is automatically updated because the apps live on the phone
Natural voice recognition with Google voice actions
Owners can easily bring their personal reminders, suggested destinations, calendar appointments and music preferences with them when they get in their car
Android Auto automatically pairs with the Sonata for phone calls through Bluetooth when connected for the first time via USB
Android Auto has familiar interfaces that are easy to use and have almost no learning curve.
Volvo Cars has a complete system solution that makes it possible to integrate self-driving cars into real traffic, with ordinary people in the driver’s seat. The automaker presented its planned system in an online press conference Feb. 19.
“We are entering uncharted territory in the field of autonomous driving,” said Peter Mertens, senior vice president of Research and Development, Volvo Car Group. “Taking the exciting step to a public pilot, with the ambition to enable ordinary people to sit behind the wheel in normal traffic on public roads, has never been done before.”
As the Drive Me project enters its second year, Volvo is moving toward its goal of placing 100 self-driving cars in the hands of customers on selected roads around Gothenburg by 2017. The public pilot — a collaboration between legislators, transport authorities, a major city and a vehicle manufacturer — is a central component of Volvo’s plan to achieve sustainable mobility and ensure a crash-free future.
Early prototype cars are now being tested on the DriveMe route in and around Gothenburg, Sweden.
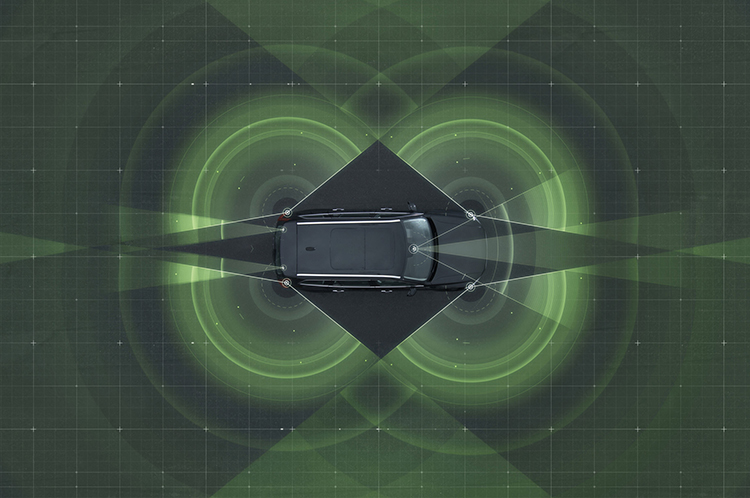
Volvo’s production-viable autonomous driving system is based on a complex network of sensors, cloud-based positioning systems and intelligent braking and steering technologies.
“Autonomous driving will fundamentally change the way we look at driving. In the future, you will be able to choose between autonomous and active driving,” Mertens said. “This transforms everyday commuting from lost time to quality time, opening up new opportunities for work and pleasure.”
Volvo’s autopilot system is designed to be reliable enough to allow the car to take over every aspect of driving in autonomous mode, Volvo said. The technology advances a crucial step beyond the automotive systems demonstrated so far since it includes fault-tolerant systems, the carmaker said.
“It is relatively easy to build and demonstrate a self-driving concept vehicle, but if you want to create an impact in the real world, you have to design and produce a complete system that will be safe, robust and affordable for ordinary customers,” said Erik Coelingh, technical specialist at Volvo Cars.
The main challenge is to design an autopilot that is robust for traffic scenarios as well as for technical faults that may occur. The driver can’t be expected to suddenly intervene in a critical situation. Initially, the cars will drive autonomously on selected roads with suitable conditions, such as without oncoming traffic, cyclists or pedestrians.
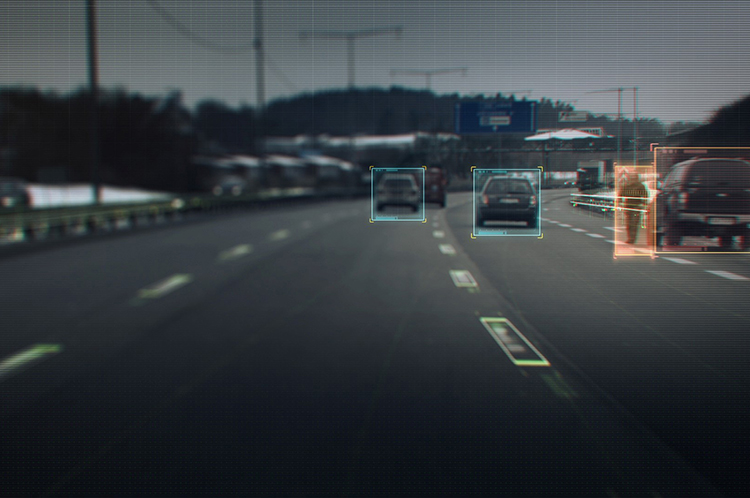
Volvo’s system generates exact positioning and a complete 360° view of the car’s surroundings through a combination of radars, cameras and laser sensors. A network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
“Making this complex system 99 percent reliable is not good enough. You need to get much closer to 100 percent before you can let self-driving cars mix with other road users in real-life traffic,” Coelingh said. “Here, we have a similar approach to that of the aircraft industry. Our fail-operational architecture includes backup systems that will ensure that the autopilot will continue to function safely if an element of the system were to become disabled.”
For example, the probability of a brake system failure is very small, but a self-driving vehicle needs a second independent system to brake the vehicle to a stop, because it is unlikely that the driver will be prepared to press the brake pedal.
On the road, the complete technology solution is designed to handle even the most complicated scenarios, from smooth commuting to heavy traffic and emergency situations, Volvo said. “Just as good drivers would, potentially critical situations are approached with sensible caution. In a real emergency, however, the car reacts faster than most humans,” Coelingh said.
When autonomous driving is no longer available — because of weather, technical malfunction or the end of the route has been reached — the driver is prompted by the system to take over again. If the driver is incapacitated for any reason and does not take over in time, the car will bring itself to a safe place to stop.
Volvo expects that autonomous driving could cut fuel consumption, improve traffic flow, and open up possibilities for urban planning and more cost-efficient investments in infrastructure.
“Developing a complete technological solution for self-driving cars is a major step. Once the public pilot is up and running, it will provide us with valuable knowledge about implementing self-driving cars in the traffic environment, and help us explore how they can contribute to sustainable mobility,” Coelingh said. “Our smart vehicles are a key part of the solution, but a broad societal approach is vital to offer sustainable personal mobility in the future. This unique cross-functional cooperation is the key to a successful implementation of self-driving vehicles.”
Drive Me system components:
The 76-GHz frequency-modulated, continuous wave radar is placed in the windscreen and combined with a camera to detect objects on the road. Four radars behind the front and rear bumpers locate objects in all directions. Long-range radars in the rear ensure a good rearward detection of vehicles in parallel lanes.
Sensor technologies. Volvo Cars is developing a holistic solution that generates exact positioning and a complete 360-degree view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors. A redundant network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
Precise positioning is based on this surround information together with GPS and a high-definition 3D digital map that is continuously updated with real-time data. The system is reliable enough to work without requiring driver supervision.
Combined radar and camera. The combined 76-GHz frequency-modulated continuous wave radar and camera placed in the windscreen is the same as that in the new XC90. This system reads traffic signs and the road’s curvature and can detect objects on the road such as other road users.
Surround radars. Four radars behind the front and rear bumpers (one on each corner of the car) are able to locate objects in all directions. By sweeping both left and right, transmitting waves that bounce off signs, poles, and tunnels, they monitor a full 360-degree around the car.
360-degree surround vision. Four cameras monitor objects in close proximity to the vehicle. Two are under the outer rear-view mirrors, one is in the rear bumper and one is in the grille. Besides detecting objects at close range, these cameras monitor lane markings. The cameras have a high dynamic range and can handle quick changes in lightning conditions, such as when entering a tunnel.
Multiple beam laser scanner. This sensor system is placed in the front of the vehicle, below the air intake. The scanner can identify objects in front of the car and ensures very high angle resolution. It can also distinguish between objects. The laser sensor has a range of 150 meters for vehicles and covers a 140-degree field of view.
Trifocal camera. A trifocal camera placed behind the upper part of the windscreen is three cameras in one, providing a broad 140-degree view, a 45-degree view and a long-range, yet narrow, 34-degree view for improved depth perception and distant-object detection. The camera can spot suddenly appearing pedestrians and other unexpected road hazards.
Long-range radars. Two long-range radars placed in the rear bumper of the car ensure a good rearward field of view. This technology is useful when changing lanes because it can detect fast-moving vehicles approaching from far behind.
Ultrasonic sensors. Twelve ultrasonic sensors around the car are used to identify objects close to the vehicle and support autonomous driving at low speeds. The sensors are based on the technology used for current park-assist functions enhanced with advanced signal processing. This technology is useful for detecting unexpected situations, such as pedestrians or hazards on the road close to the car.
High-definition 3D digital map. A high-definition 3D digital map provide the vehicle with information about the surroundings, such as altitude, road curvature, number of lanes, geometry of tunnels, guard rails, signs, and exits. The position geometry is in many cases at centimeter level.
High-performance positioning. The high-performance GPS is one part of the positioning control that is enhanced by a combination of an advanced GPS, a three-degrees-of-freedom accelerometer and a three-degrees-of-freedom gyro. By matching the 360-degree image created by the multitude of sensors with the map image, the car will get the information about its position in relation to the surroundings.
By combining the information from the sensors and the map, the Drive Me car is able to choose the best course in real time, factoring in variables such as the curvature of the road, speed limit, temporary signs and other traffic.
Cloud services. The cloud service is connected to the traffic authorities’ control center. This ensures that the most up-to-date traffic information is always available. Control center operators also have the ability to tell the drivers to turn off the autonomous drive mode if necessary.
Magellan has introduced its newest lineup of 5-inch RoadMate auto navigators at the International Consumer Electronics Show, being held this week in Las Vegas. To provide a more realistic view of a user’s surroundings, each of the GPS models comes equipped with 3D renderings of buildings and landmarks.
The new models are: RoadMate 5322-LM, RoadMate 5330T-LM with real-time traffic alerts, and RoadMate 5375T-LMB with real-time traffic alerts, Bluetooth connectivity and portrait viewing mode.
The units will be displayed at CES in the Magellan booth, LVCC South Hall 2, MP25441.
“Our new RoadMate 5-inch GPS devices for 2015 have large, vibrant displays and include a vast collection of renowned Magellan navigation features,” said Stig Pedersen, Magellan associate vice president of product management. “Plus, each model includes 3D renderings of buildings and landmarks to make it easier and quicker for users to identify where they are. Whether driving to work, across country, or going to grandma’s, drivers can count on these Magellan navigation units to safely guide them to wherever their destination is.”
Below are a few of the features that the three RoadMate GPS devices share.
3D Renderings – Selected buildings and landmarks are presented in 3D for a more realistic view.
Lifetime Map Updates – Owners of these three models can download the latest map information (up to four times a year) for all 50 states and Canada.
Traffic Camera Alerts – Sends audible and visual warnings of upcoming red lights, speed cameras, and more; provided by PhantomALERT.
7,000 POIs – Includes branded and highway exit POIs to conveniently search for restaurants, hotels, gas stations, and more.
OneTouch Favorites Menu – Creates shortcuts to favorite destinations and searches.
Multi-Destination Routing – Users can plan their entire day or multi-day trip in one route.
Junction View – Realistic images of freeway signs and arrows guide drivers to the correct lane.
SmartDetour – Provides immediate options when traffic suddenly comes to a halt.
RoadMate 5330T-LM
In addition to the features above, the 5330T-LM also includes:
Free Lifetime Traffic Alerts – Helps users avoid traffic jams and delays, suggests detours, provides travel times; no hidden fees or subscriptions.
RoadMate 5375T-LMB
In addition to the features above, the 5375T-LMB also includes:
Free Lifetime Traffic Alerts – Helps users avoid traffic jams and delays, suggests detours, provides travel times; no hidden fees or subscriptions.
Portrait Viewing Option – Provides extended view of the road ahead.
Bluetooth Compatibility – Turns this RoadMate model into a hands-free speakerphone, making drive time safer and more productive.
The Magellan 5-inch RoadMate family of auto navigation devices will be available at retailers throughout the U.S. and Canada as well as online in March 2015. MSRPs are as follows: $149.99 (RM5322-LM); $159.99 (RM5330T-LM); and $199.99 (RM5375T-LMB).
Start of the 550-mile piloted drive from Silicon Valley to Las Vegas: Ricky Hudi, Audi executive vice president electric/electronic development (left) and Ewald Gössmann, excecutive director Electronic Research Lab California (ERL), (third from right) drop the flag for the Audi A7 piloted driving concept car. Photo: Audi
An autonomous Audi A7 is driving itself to Las Vegas for this week’s 2015 Consumer Electronics Show. The Audi is making the 550-mile trip as journalists sit behind the wheel for 100-mile stretches with an Audi official in the passenger’s seat.
The car left Stanford, Calif., Jan. 5 and traversed real-world roads and traffic conditions on its way to Las Vegas.
The long-distance test drive of the Audi A7 piloted driving concept car is designed to show that unprecedented performance can be achieved with series production technology, Audi said in a statement.
“The test drive from the west coast of California to Las Vegas demonstrates our leadership role in piloted driving,” said Prof. Dr. Ulrich Hackenberg, Audi board member and head of technical development. The test drive in real world traffic and road conditions represents a joint effort by the Volkswagen Electronics Research Laboratory (ERL) und Volkswagen Group Research and Development, begins today in Stanford, CA. The Audi A7 piloted driving concept will drive more than 550 miles, approximately 900 kilometers.
The A7 piloted driving concept uses the latest technologically advanced systems developed by Audi. The concept relieves the driver of driving duties from 0 to 70 mph, or just over 110 km/h. The car, named “Jack” by the development team, can initiate lane changes and passing maneuvers. In addition, the A7 piloted driving concept accelerates and brakes independently. Before initiating a lane change to the left or the right, the vehicle adapts its speed to surrounding vehicles. If the speed and distance calculation is deemed safe, the vehicle initiates the lane change with precision and in a timely manner.
The piloted concept vehicle uses a combination of various sensors, many of which are close to production ready. The long range radar sensors of the adaptive cruise control (ACC) and the Audi side assist (ASA) keep watch of the front and rear of the vehicle. Two mid-range radar sensors at the front and rear respectively are aimed to the right and left to complete the 360 degree view. Laser scanners are mounted within the Singleframe grille and the rear bumper skirt. The scanners deliver redundant information to provide detailed recognition of static and dynamic objets during piloted driving. The technologies are production ready including their vehicle integration and cost structure for vehicle production in the near future. A new high-resolution 3D video camera, already integrated into the next-generation systems found in the new Q7, takes a wide-angle view out in front of the vehicle. Four small front and rear mounted cameras view closer surroundings. Navigation data is used for basic vehicle orientation.
Before the piloted driving system reaches its limitations, in city environments for example, the driver is requested to take control of the vehicle to ensure proper safety. Multiple warning signales work in unison: colored LEDs at the base of the windshield, signals in the driver information display, a Central Status Indicator (CSI), as well as a acoustic warning indicator requires the driver to retake control. Should the driver ignore the signals, the system activates the hazard lights and brings the car to a full stop while minimizing any risk. In most instances the vehicle is stopped on the right emergency lane.
The training for the jounalist test drivers taking part in the 550-mile trek took place several weeks ago at the Arizona Proving Grounds. Each journalist will drive approximately 100 miles using the piloted driving system. A trained Audi professional test driver will accompany the media from the passenger seat for added safety.
Qualcomm Technologies will demonstrate two new full technology concept cars that integrate Qualcomm Technologies’ latest in vehicle technology and connectivity at the 2015 Consumer Electronics Show, being held this week in Las Vegas. The technology concept cars are based on the 2015 Maserati Quattroporte GTS and the 2015 Cadillac XTS and have been customized to bring the full Snapdragon Automotive Solutions experience to life, including the Qualcomm Snapdragon 602A automotive-grade processor, Qualcomm Gobi 3G/4G LTE wireless modems and Qualcomm VIVE QCA6574 Wi-Fi and Bluetooth module, and Qualcomm IZat RGR7640 GNSS module. Qualcomm Snapdragon and Qualcomm Gobi are products of QTI, and Qualcomm VIVE and Qualcomm IZat are products of QCA.
The Qualcomm Concept Car – Cadillac demonstrates pre-integrated support for Android, including the latest Android L and Kit Kat; high resolution infotainment displays for visually stunning graphics for cluster and infotainment; integrated in-vehicle features, including navigation, music, live streaming of sports, news and entertainment content via LTE-Broadcast; enhanced safety features such as lane detection with integrated navigation, driver distraction avoidance notification, gesture recognition, car personalization via the AllSeen Alliance’s AllJoyn open source framework; wireless audio streaming from personal devices via the Qualcomm AllPlaysmart media platform; smartphone integration and Qualcomm WiPower flexible wireless charging for consumer electronics and; 4G LTE multimode Internet connectivity including WiFi hotspot and Bluetooth profile support.
The Qualcomm Concept Car – Maserati features pre-integrated support for the latest versions of the QNX Neutrino OS and the QNX CAR Platform for Infotainment from QNX Software Systems, a subsidiary of BlackBerry Limited. Highlights include an instrument cluster with speed recommendations, collision warnings, and intelligent parking assist; an infotainment system with 3D navigation, smart phone integration, rear seat entertainment with easy-to-use multimodal UI supporting gestures (tap, swipe, pinch), and voice recognition; an immersive driver experience with rear and side view mirror/displays, complete with refitted cameras and informational safety features; WiPower flexible wireless charging for consumer electronics; and 4G LTE multimode Internet connectivity, including WiFi hotspot and Bluetooth profile support.
Integrated into the technology concept cars are:
Elektrobit’s EB street director navigation software and the latest version of its EB Assist eHorizon Solution with audible and visual warnings and recommendations about the road ahead
TomTom advanced navigation and map services
Jungo’s MediaCore smartphone connectivity and multimedia playback
Rightware’s software and user interface for the instrument cluster
Ricardo’s integrated hardware, controls and electronics
Streaming Internet radio services from Pandora via HTML5 and iHeartRadio via Android
Voice recognition and speech-to-text services powered by Nuance’s Dragon Drive
NXP’s SAF775x AM/FM radio tuner support
QNX Neutrino OS and QNX CAR Platform for next-generation safety and infotainment features
The concept cars are on display at CES, located at the Las Vegas Convention Center, Central Hall, Booth 8252 and Central Plaza, Booth CP21A.
Azuga Fleet, a cloud-based, rewards-driven GPS fleet tracking and driver behavior solution, is collaborating with Verizon Wireless. Verizon will serve as the official wireless network provider for Azuga Fleet, providing reliable performance and real time updates to fleet managers from the field in order to further increase efficiencies in the fleet industry through machine-to-machine (M2M) technologies.
“We chose Verizon Wireless to make Azuga Fleet’s technology even more accessible, simpler and reliable for fleet managers to utilize,” said Vice President and General Manager of Azuga Fleet, Ananth Rani. “Azuga will be expanding its roadmap to encompass products related to IoT (Internet of Things) 2015 and we look forward to working with Verizon as we develop these and bring them to market.”
“By working together and combining our superior and most reliable network with Azuga Fleet’s unique driver behavior and rewards solution technology we will further increase fleet efficiencies and promote safer driving behaviors,” said Verizon Wireless Region President Lauren Love-Wright. “This new service is a simple and quick solution for any fleet manager to rapidly deploy GPS fleet tracking and driver behavior solutions.”
The teamwork between Verizon Wireless and Azuga Fleet directly benefits customers, especially those who face limited network service in various parts of the country. The bundled solution will provide Verizon Wireless coverage to all existing and future Azuga Fleet customers, giving fleet managers the high-speed reliability they need for accurate, real-time reporting.
Verizon Wireless’ M2M services, including secure mobility, device provisioning and troubleshooting, are designed to provide the highest level of customer support to Azuga’s customers. This, coupled with the cloud-based, rewards-driven, plug-and-play technology, will save Azuga Fleet customers money, increase overall productivity, enhance company cultures, and keep drivers safe at 70 cents per day per vehicle.
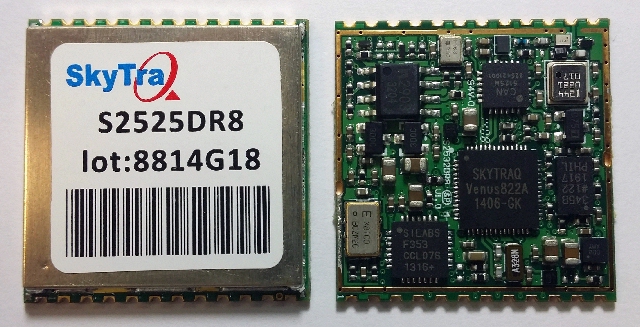
SkyTraq Technology, Inc., a fabless GNSS positioning technology company, has introduced an all-in-one S2525DR8 GNSS dead-reckoning module, with integrating MEMS sensor and interface logic on-board. The module is designed for road vehicles requiring high accuracy 100 percent positioning availability.
The S2525DR8 offers accuracy for both indoor and outdoor positioning. It is based on SkyTraq’s Venus 8 multi-GNSS platform and uses a high-performance automotive-grade XV-8100CB analog output gyroscope and 16-bit differential ADC. A 3D option adds a barometric pressure sensor on-board, offering improved accuracy for altitude reading and altitude change detection over an accelerometer-based scheme in 3D dead reckoning.
Another monitoring option adds an accelerometer on-board, offering high-accuracy vehicle acceleration monitoring for driver behavior characterization, accident reconstruction analysis, or trigger event recording. The S2525DR8 is compact at 25 x 25 millimeters. It contains a level shifter on board, capable of direct interface to a vehicle odometer and forward/reverse signals ranging from 3V to 30V.
The SPI interface pins on the module allow autonomous data logging to an external SPI Flash memory device. For high-performance vehicle navigation systems, S2525DR8 provides continuous navigation inside tunnels and underground parking lots without signals; highly accurate barometric altitude enables identification of which level the vehicle is on in a stacked multi-level high-way or a multi-story car park. For automatic vehicle locating or fleet management systems, location can be identified immediately after power on, whether the vehicle is outdoors or indoors under a signal-denied environment.
The S2525DR8 provides reliable, uninterrupted position, speed and heading information in challenging environments; it is suitable for demanding vehicle navigation and tracking applications requiring the highest accuracy and availability, SkyTraq said. The S2525DR8 is now being manufactured in ISO/TS 16949 automotive-certified factories; an evaluation kit, sample, datasheet, and reference design are available now. A 3D option with barometric sensor and a vehicle-dynamics monitoring option with accelerometer will be available in the first quarter of 2015.

 The 116-page Intergeo Report, in parallel German and English, includes sections on smart cities, public participation, autonomous driving with live mapping, and surveying on the open seas. An eight-page GNSS Update section features CEOs answering questions market focus of their GNSS products, the role of geo-referencing in the Internet of Things, the coming-of-age of precise point positioning (PPP), and the opportunities for GNSS opened up by autonomous driving.
The 116-page Intergeo Report, in parallel German and English, includes sections on smart cities, public participation, autonomous driving with live mapping, and surveying on the open seas. An eight-page GNSS Update section features CEOs answering questions market focus of their GNSS products, the role of geo-referencing in the Internet of Things, the coming-of-age of precise point positioning (PPP), and the opportunities for GNSS opened up by autonomous driving.