“As of today [Nov. 28] Tesla owners have driven 1 billion miles with Autopilot engaged,” the company announced via tweet.
The Autopilot feature became available in 2015 and now comes on all new Tesla models with a $5,000 activation fee at the time of purchase or $7,000 if selected later.
The company is training its “neural networks” to improve its self-driving system.
Photo: Tesla
Tesla’s global fleet totals more than half a million vehicles, and recently marked a 20-billion mile step of total electric miles driven, the company said.
The Autopilot system can also function in the background of the vehicle, without being activated and with no input on control. Thus it gathers data from many more billions of “drivered” miles about its environment and potential Autopilot behavior.
The company previously mentioned the 1 billion-mile autonomous mark as the minimum it would need to move Autosteer from beta to a regular feature.
Updates to Autopilot are planned for 2019, including new hardware that will aid in the rollout of the company’s Full Self-Driving system, possibly by the end of that year.
The U.S. Department of Transportation’s most recent document preparing for the future of self-driving cars almost entirely ignores positioning, navigation and timing (PNT) needs, according to the Resilient Navigation and Timing (RNT) Foundation. And when it does address GPS, it gets things wrong. A Dec. 3 deadline looms for interested parties to file their comments with DOT.
The comment period is open until December 3. Interested parties can make their own comments and read those already submitted at the website for Docket DOT-OST-2018-0149.
The cited comment from the RNT Foundation states that, while most self-driving cars are being designed to navigate without external inputs, GPS/GNSS will still be required to initialize location information for vehicle cold startups. Also, most vehicles will reference GPS/GNSS when communicating their positions to other vehicles and traffic control systems.
Much of the benefit of automated vehicles will come from their participation in Intelligent Transportations Systems. This means wireless networks. The RNT Foundation also urges the department to consider these networks’ critical dependence on GPS timing synchronization in their plans going forward.
(Image: Pavel Vinnik/Shutterstock.com)
The Secretary of Transportation has had a mandate to provide a backup capability for GPS since 2004 that has not been acted upon. The RNT Foundation comments observe that doing so could greatly mitigate all of the concerns mentioned.
Dana Goward is president of the Resilient Navigation and Timing Foundation, based in Washington D.C.
Cohda Wireless has successfully demonstrated its connected autonomous vehicle technology in a live trial on the streets of the city of Adelaide, Australia.
The trial proved the potential for connected self-driven vehicles to make streets safer and that Cohda’s technology is effective even in challenging urban canyons.
In an area covering two city blocks east of Adelaide’s Victoria Square, the demonstration replicated a scenario that is a daily occurrence on the streets of cities all over the world.
In the scenario, two vehicles approach a four-way intersection at right angles to each other. Car 2, driven by a human, fails to adhere to the red-light signal and approaches the intersection at speed, intending to “skip” the red light. Car 1, a connected autonomous vehicle, is approaching the intersection from another direction and intends to proceed through the intersection on the green light.
In a real-life scenario, there would be a risk of a collision as human drivers will invariably approach the intersection when the light is green, fully confident that all other road users will obey the traffic signals. In an instance where Car 2 disobeyed the traffic signal and Car 1 was unable to see the approaching danger, due to visibility being obstructed by buildings or other infrastructure, a collision would be especially likely.
But as Cohda Wireless’s Chief Technical Officer Professor Paul Alexander explained, if the vehicles were connected using Cohda’s V2X (Vehicle-To-Everything) technology, a potential collision situation would be detected and avoided well in advance of it actually happening.
“We demonstrated that when vehicles are connected to each other using our smart V2X technology, Car 1, the connected autonomous vehicle, would detect that Car 2 is approaching the red light at speed and is probably not going to stop. This allows the connected autonomous vehicle to pre-emptively identify and respond to the threat by slowing down and stopping.”
“Cohda’s V2X technology allows vehicles to ‘speak to each other’ to extend their perception horizon,” added Alexander.
“The technology provides the vehicle with an awareness of its environment and risk factors associated with it, consistently and accurately up to ten times per second, enabling it to make decisions that a human being would not be capable of making as the driver of the vehicle.”
Cohda’s Smart Cars Smart City initiative was funded by the South Australian Department of Transport and Infrastructure’s Future Mobility Lab Fund. In June this year, Cohda Wireless took ownership of two specially-modified vehicles from the U.S. that it is using in advanced trials of its V2X (Vehicle-To-Everything) technology.
The two Lincoln MKZ sedans were fitted with the ADAS (Advanced Driver Assistance Systems), ROS (Robot Operating System) various sensors including lidar, radar, cameras, GPS as well as in-vehicle compute platform and Cohda’s GNSS- independent positioning technology.
The fusion and cooperation of the various sensors and Cohda’s V2X technology augment the vehicles’ perception capability and make the autonomous vehicles features more practical, to include threat detection, the dangers associated with blind intersections and vulnerable road users, the company said.
“Our goal today was not only to demonstrate the efficacy of our technology in enabling self-driven vehicles to communicate with each other, but also to do so in a city environment where so-called ‘urban canyons’ significantly affect the ability of systems reliant on Global Navigation Satellite Systems (GNSS) to achieve accurate positioning,” Alexander said.
“The area in the city of Adelaide in which the trial was conducted was one such urban canyon where positioning through GNSS can be off by up to 40 meters, but with our V2X Locate technology positioning accuracy is improved to within a meter.”
Photo: Cohda Wireless
Cohda Wireless demonstrated the efficacy and accuracy of its V2X-Locate system in a 2017 trial in New York City where it repeatedly demonstrated sub-meter accuracy while driving along Sixth Avenue, which has the tallest buildings in the Big Apple. Comparably tested GPS-based systems were as much as tens of meters off-course, at times showing cars driving through buildings.
Cohda’s V2X technology underpins and complements other technology used by autonomous vehicles such as cameras, sensors, radars and lidars by enabling cooperative perception.
“The role of technology in making our roads safer is probably not generally understood but we hope that this demonstration has helped to prove that with the appropriate technology and infrastructure, connected self-driving vehicles are safer to have on our roads than vehicles controlled entirely by human beings,” added Alexander.
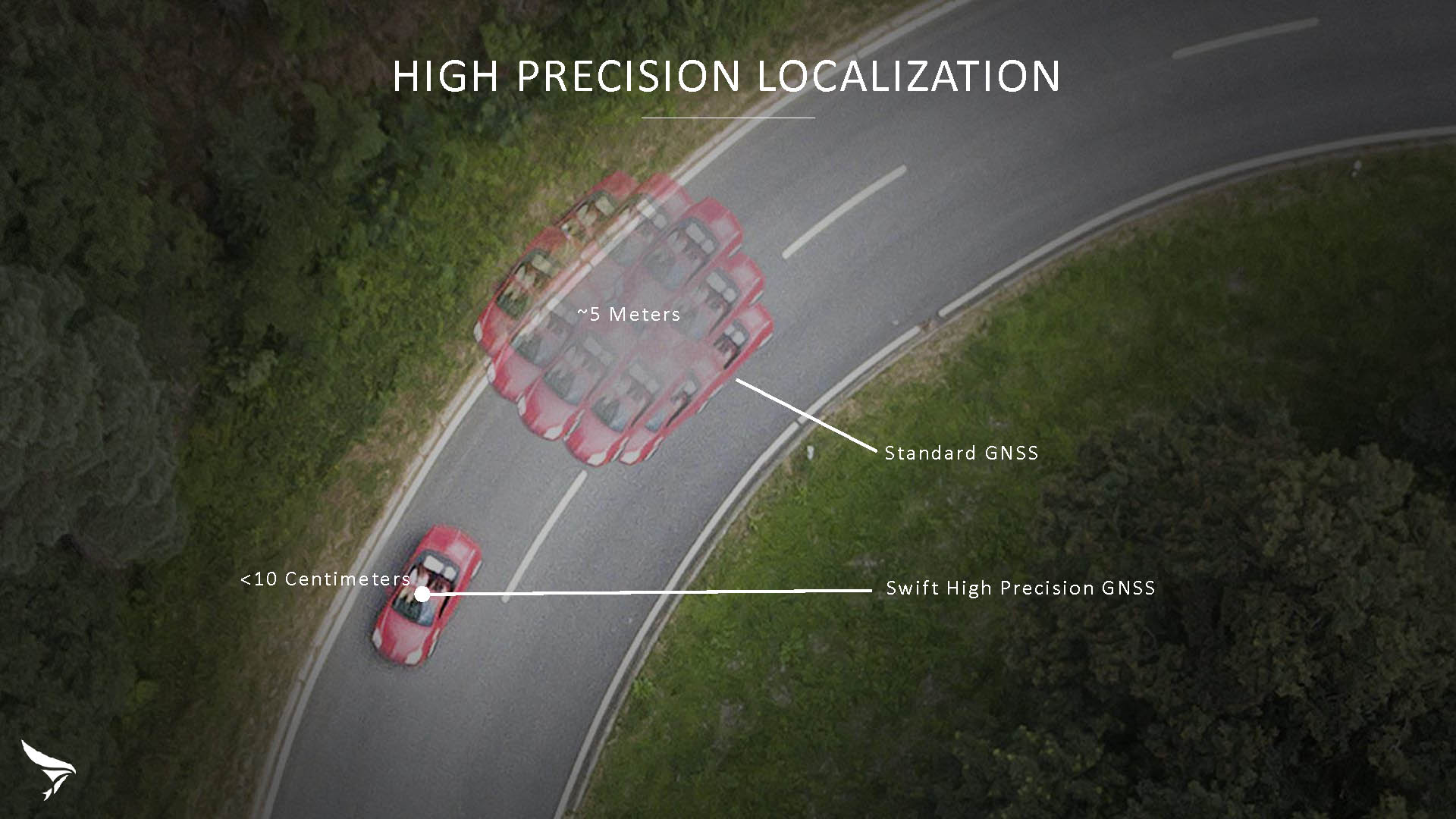
Swift Navigation has released Skylark, a cloud-based GNSS corrections service delivering centimeter-level accuracy without deploying and maintaining a GNSS network. Skylark targets autonomy applications at scale and enables high-precision positioning for mass market automotive and autonomous vehicle applications.
Skylark works with both of Swift’s multi-band, multi-constellation GNSS receivers, the Piksi Multi and the Duro ruggedized industrial receiver. Swift added GLONASS support in its 1.4 firmware upgrade, announced earlier this month, and aims to include Galileo and BeiDou in the near future.
Previously known as a hardware company, Swift Navigation appears to be shifting its focus a bit, including an Internet-delivered service in addition to its GNSS receivers. It has recently focused more closely on the automotive sector; it also has customers in drone technology, robotics and precision agriculture.
Its new platform for high-precision GNSS navigation of autonomous vehicles, via Internet connectivity, Skylark delivers fast convergence times measured in seconds, using positioning algorithms to provide a continuous stream of data to individual devices from the cloud. The data stream allows for quick and robust positioning and high reliability and availability, even in challenging environments, according to the company.
The Skylark service offers accuracy at the centimeter level. (Image: Swift Navigation)
Critical requirements for real-time absolute localization through GNSS for the automotive sector, according to Fergus Noble, co-founder and CTO of Swift Navigation, are:
high accuracy; centimeter level
availability; fast convergence, measured in seconds
integrity
scalability to support a large vehicle population
low cost.
Internet-Delivered via Cell Network
The last two requirements are fulfilled by the cloud-based approach. He characterized Skylark as a hybrid of RTK (Real Time Kinematics) and PPP (Precise Point Positioning) approaches augmented by Swift’s intellectual property, with corrections delivered over the Internet as provided by the cellular network, which he described as “robust to outages.” Cell coverage along road networks is good, Noble asserted, and 5G applications are increasing that coverage and will further enable connected vehicles. Automotive OEMs are comfortable with the level of cell coverage for this application, according to him. There has been testing to show robustness in most rural areas, and network operators are dedicated to increasing this.
“Skylark operates like a utility,” said Noble. “It is a simple, low-cost Internet data stream that provides customers with a complete high-integrity GNSS solution. Simply supply a Swift receiver with power and Internet connectivity and get real-time corrections for highly-dynamic GNSS applications.”
To realize the Skylark service, the company hired a team of cloud-based engineering experts who had a role in building Amazon and Oracle critical infrastructure. Swift Navigation is initially launching only with its own devices, but is making the service publicly-available for any customer in any vertical requiring precise positioning. “Every car company is building in autonomous functionality,” noted Noble, making clear who the company is ultimately targeting.
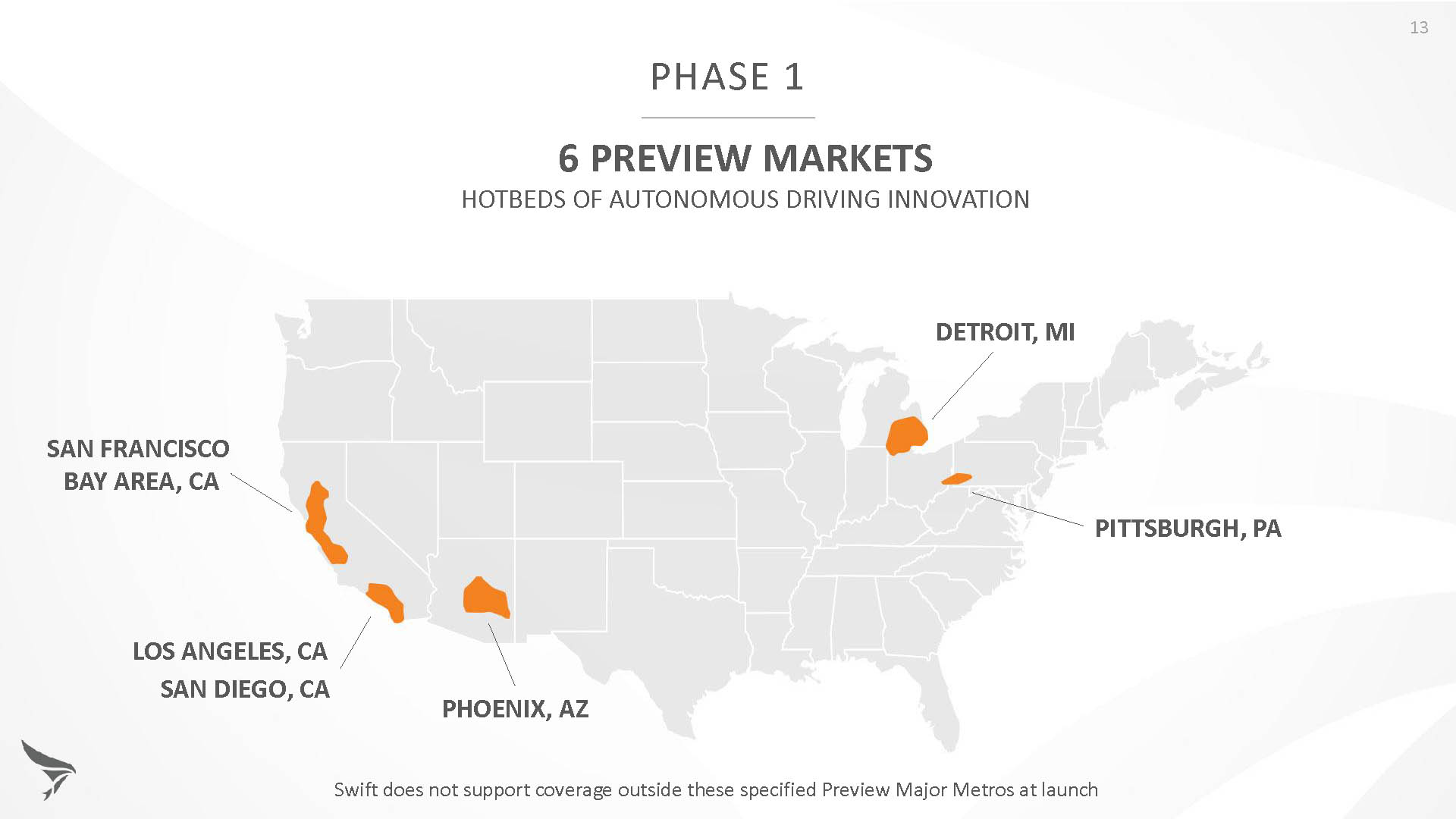
Skylark is currently offered in six metropolitan markets. (Image: Swift Navigation)
Swift has been working with beta customers for more than a year and is now previewing the service to all customers in six metropolitan markets: the San Francisco Bay Area, Los Angeles, San Diego, Phoenix, Pittsburgh and Detroit. The company envisions full contiguous U.S. and ultimately global expansion. Customers in preview areas with Swift receivers can sign up for Skylark and immediately start receiving corrections.
The service maintains low bandwidth to save on data costs and is offered with a free 30 day trial and flexible pricing plans. Skylark’s pricing structure includes a monthly plan and an annual plan. Enterprise pricing is available for volume orders.
Voyage Self-Driving Car Active Service and Coming Expansion
An early beta user of the service, Voyage deploys self-driving taxis in private communities across North America. “Skylark and Piksi Multi are working safely and efficiently in a real-world application today at The Villages, a retirement community in San Jose, California,” said Oliver Cameron, co-founder & CEO of Voyage.
Voyage incorporates Skylark GNSS corrections in controlled road networks in private communities. (Image: Swift Navigation)
Voyage’s passenger cars carry a roof-racked suite of sensors: the Swift Navigation Piksi Multi GNSS receiver, LiDAR, cameras, radar, and an inertial measurement unit. A computer in the trunk integrates all sensor signals and uses the car’s CAN bus to operate steering, braking, and other functions. An operator sits behind the wheel at all times, sometimes with a co-pilot: one to watch the road ahead, and one to watch the software. “Safety is our first priority,” said Cameron.
The service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. (Image: Swift Navigation)
The Voyage fleet stays within the bounds of a given community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in metropolitan cities. The first in the San Jose area serves private community of more than 4,000 residents, with a 15-mile road network. Today, residents are able to summon a Voyage self-driving taxi using a smartphone app and have a ride waiting at their front door. This service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. Voyage takes residents of The Villages to and from the gym, to visit with friends, to the golf course and to community center events.
Image: Swift Navigation
Voyage will next deploy the Swift product suite in its upcoming deployment launching to 160,000 retirees at The Villages complex in Florida, over a road network of 750 miles. It is currently in a “Q/A” testing phase on that site, working the technology and the local mapping through their paces.
BlackBerry Limited and Baidu Inc. are collaborating to accelerate the deployment of connected and autonomous vehicle technology for automotive OEMs and suppliers worldwide.
The companies have signed a statement of intent to make BlackBerry QNX‘s ISO26262 ASIL-D certified safety operating system (OS) the foundation for Baidu’s Apollo autonomous driving open platform.
Also, BlackBerry and Baidu will work together to integrate Baidu’s CarLife, the leading smartphone integration software for connected cars in China, as well as its conversational artificial intelligence system DuerOS, and high-definition maps to run on the BlackBerry QNX Car (Infotainment) Platform.
Blackberry QNX will host demonstrations of its foundational software for autonomous and connected vehicles at the Consumer Electronics Show (CES) 2018, at North Hall Booth 7523. The show takes place Jan. 9-12 in Las Vegas.
“BlackBerry QNX has established itself as the OS platform for safety-certified production-based systems,” said Li Zhenyu, general manager of Intelligent Driving Group, Baidu. “We aim to provide automakers with a clear and fast path to fully autonomous vehicle production, with safety and security as top priorities. By integrating the BlackBerry QNX OS with the Apollo platform, we will enable carmakers to leap from prototype to production systems. Together, we will work toward a technological and commercial ecosystem for autonomous driving, intelligent connectivity and intelligent traffic systems.”
“Joining forces with Baidu will enable us to explore integration opportunities for multiple vehicle subsystems including ADAS, infotainment, gateways and cloud services,” said John Wall, senior vice president and GM of BlackBerry QNX. “Baidu has made tremendous strides in artificial intelligence and deep learning. These advancements paired with their high-definition maps and BlackBerry’s safety-critical embedded software and expertise in security will be crucial ingredients for autonomous vehicles.”
Announced by Baidu in April 2017, Apollo is an open platform that provides a comprehensive, secure, and reliable solution that consists of cloud services, an open software stack and reference hardware and vehicle platforms. It supports all major features and functions of an autonomous vehicle.
More than 70 global partners are involved with Apollo, including OEMs, Tier 1 suppliers, developer platforms and technology start-ups. The project was named after the historic lunar landing program to illustrate its scale and complexity. BlackBerry provides OEMs with cybersecurity technology to protect and mitigate, including hardware, software, applications and end-to-end systems from cyberattacks.
BlackBerry’s pedigree in security and continued innovation has led to recent automotive design wins with Delphi, Denso, Qualcomm, Visteon and others.
Lear Corporation, a global supplier of automotive seating and electrical systems, has entered into a definitive agreement to acquire Israel-based EXO Technologies, a developer of GPS technology providing high-accuracy solutions for autonomous and connected vehicle applications.
EXO Technologies has operations in San Mateo, California, and Tel Aviv, Israel. Financial terms of the transaction were not disclosed.
EXO Technologies has developed core technology that addresses the need for high-accuracy positioning in a vehicle. Its proprietary technology works with existing GPS receivers to provide centimeter-level accuracy anywhere on the globe without the need for terrestrial base-station networks.
EXO Technologies offers a software-based GPS approach — PICO pinpoint positioning software — that enhances GNSS receivers. By correcting satellite orbit error and clock error, it eliminates the inherent error sources within navigation messages. Its algorithms reduce complementary errors and construct a full positioning solution.
The integration of EXO’s technology with Lear’s vehicle and connectivity expertise will enable a superior vehicle positioning solution, the companies say.
“EXO has developed technology that is essential for the future of connected and autonomous vehicles,” said Nuri Golan, EXO co-founder and CEO. “We are extremely excited to join the Lear family where we will provide unparalleled solutions for vehicle-to-vehicle, autonomous driving and other applications.”
“Lear is a leader in automotive connectivity solutions including Vehicle-to-Vehicle and Vehicle-to-Infrastructure communications,” said Matt Simoncini, Lear’s president and chief executive officer. “The acquisition of EXO Technologies will provide Lear with a differentiated technology to significantly improve GPS accuracy and reliability, thereby enhancing vehicle safety and enabling autonomous driving.
“The combination of EXO Technologies with Lear’s existing resources further strengthens our connectivity capabilities,” Simoncini said. “We see excellent growth opportunities for our E-Systems business as the proliferation of connected and autonomous vehicles will drive increased demand for improved accuracy and reliability in vehicle positioning.”
General Motors’ self-driving unit Cruise Automation is applying to begin the first sustained testing of vehicles in fully autonomous mode in New York state — specifically in Manhattan — in early 2018.
“Autonomous vehicles have the potential to save time and save lives, and we are proud to be working with GM and Cruise on the future of this exciting new technology,” said New York State Governor Andrew Cuomo.
Testing in New York will accelerate the timeline to deploying self-driving cars at scale, according to Kyle Vogt, CEO of Cruise Automation. “New York City is one of the most densely populated places in the world and provides new opportunities to expose our software to unusual situations, which means we can improve our software at a much faster rate.”
GM is also doubling the size of its test fleet in San Francisco, California, from 30 to 100 as part of its effort to develop software capable of navigating congested and chaotic urban environments. GM has reported more run-ins between its self-driving cars and human-operated vehicles and bicycles. Its vehicles were involved in six minor crashes in September, all of which were caused by the other vehicle.
Lidar Acquisition. GM announced Oct. 9 that it has acquired lidar company Strobe. Strobe’s engineering staff joins GM’s Cruise Automation team to define and develop next-generation lidar solutions for self-driving vehicles. Lidar images provide a more accurate view of the world than cameras or radar alone, information needed by autonomous cars.
Columbus, Ohio, has positioned itself smartly for an autonomous future, taking a lead role in pilot projects on infrastructure and autonomous air and road transport.
The city will draw on up to $40 million in grants from the U.S. Department of Transportation, $10 million from Vulcan, Inc,. and $500 million in local private pledges.
Carla Bailo, assistant vice president for mobility research and business development at Ohio State University (OSU), presented the city’s ambitious program at ION GNSS+.
In “Position, Navigation and Timing — An Enabling Technology for Mobility and Smart Cities,” she focused on a triple-zero target: zero accidents and fatalities, zero carbon footprint and zero stress.
Smart Columbus will put six autonomous shuttle buses in the commercial district, coordinate truck platooning, time deliveries and manage parking to reduce congestion, and undertake drone delivery of medical supplies and other critical needs. Multimodal transit apps, mobility assistance for those with disabilities and pedestrian collision avoidance will be based on real-time data on transit options and availability, as well as traffic information, road and weather conditions.
Position, navigation and timing (PNT) technologies play a central role in smart cities: vehicle-to-vehicle and vehicle-to-infrastructure communication, autonomous navigation and collision avoidance, location-based services and smart, resilient infrastructure.
Smart Columbus envisions the city as a center for high-tech transportation research and innovation. OSU’s partnerships with mobility companies and vehicle manufacturers, industry groups and government agencies contribute to the city’s comprehensive approach to the smart city project. Through its expertise in sensors, communication, PNT, transportation, autonomous and connected vehicles, and geospatial science and engineering, OSU will serve as the lead researcher on Smart Columbus.
Dorota Grejner-Brzezinska, OSU professor and frequent contributor to GPS World, in her new role as associate dean for research at OSU’s College of Engineering will be a key participant in research projects on ways to integrate self-driving cars, deliver high-definition 3D maps and metadata, use sensors to better connect vehicles for safety and efficiency, and find better ways to move people around the city when they don’t have access to a car.
General Motors Co.’s (GM) self-driving unit, Cruise Automation, has more than doubled the size of its test fleet of robot cars in California during the past three months, a GM spokesman told Reuters.
The unit is testing vehicles in San Francisco as part of its effort to develop software capable of navigating congested and often chaotic urban environments.
GM has reported more run-ins between its self-driving cars and human-operated vehicles and bicycles. Its vehicles were involved in six minor crashes in September, all of which were caused by the other vehicle.
In the past three months, the Cruise unit has increased the number of vehicles registered for testing on California streets to 100 from the previous 30 to 40.
Lidar acquisition. GM announced Oct. 9 that it hasacquired lidar technology company Strobe. Strobe’s engineering talent joins GM’s Cruise Automation team to define and develop next-generation lidar solutions for self-driving vehicles.
In September, Cruise Automation revealed the world’s first mass-producible car designed with the redundancy and safety requirements necessary to operate without a driver. The vehicle will join Cruise’s testing fleets in San Francisco, metropolitan Phoenix and Detroit.
Lidar uses light to create high-resolution images that provide a more accurate view of the world than cameras or radar alone. As self-driving technology continues to evolve, lidar’s accuracy will play a critical role in its deployment.
u-blox, Bosch, Geo++ and Mitsubishi Electric are establishing the joint venture Sapcorda Services to bring high-precision GNSS positioning services to mass markets, including autonomous driving.
Bosch, Geo++, Mitsubishi Electric and u-blox have created Sapcorda Services GmbH, a joint venture that will bring high-precision GNSS positioning services to mass-market applications.
The four companies recognized that existing solutions for GNSS positioning services do not meet the needs of emerging high-precision GNSS mass markets.
As a result, they decided to join forces to facilitate the establishment of a worldwide available and affordable solution for system integrators, OEMs and receiver manufacturers. Each partner brings its unique expertise to the joint venture Sapcorda Services.
Sapcorda will offer globally available GNSS positioning services via internet and satellite broadcast and will enable accurate GNSS positioning at centimeter level. The services are designed to serve high-volume automotive, industrial and consumer markets.
The real-time correction data service will be delivered in a public, open format and is not bound to receiver hardware or systems. More information will be made available later this year.
“We believe this initiative with Bosch, Geo++ and Mitsubishi Electric to create Sapcorda Services will bring a truly disruptive GNSS service offering to the market,” said Daniel Ammann, executive VP and co-founder at u-blox. “Key characteristics such as security, safety and mass-scalability, coupled with an attractive business model and an open approach — serving all interested GNSS receiver manufacturers alike — will be a game-changer across a large number of established and emerging applications.”
“We are looking forward to collaborating with our partners in this joint venture,” said Jumana Al-Sibai, member of the executive management of the Chassis Systems Control division of Robert Bosch GmbH. “Together, we want to create a GNSS positioning service that fully supports the requirements for positioning sensors in the automotive sector. Only with built-in safety and the highest levels of precision will we be able to make automated driving reality.”
“Geo++ anticipates defining the future of high precision positioning services with our partners at Bosch, Mitsubishi Electric and u-blox. The combination of the partners’ longstanding leadership in automotive and mass market solutions with Sapcorda’s commitment to push open formats will pave the way for a raft of next generation GNSS applications,” said Gerhard Wübbena founder & president of Geo++.
“Mitsubishi Electric aims to create a border-less global market for high-precision positioning systems where receivers will be able to enjoy real-time correction data services potentially interoperable with the Japanese government’s Centimeter Level Augmentation Service (CLAS) via the Quasi-Zenith Satellite System,” said Masamitsu Okamura, executive officer in charge of Electronic Systems at Mitsubishi Electric Corporation. “We believe that this venture will accelerate adoption of automated driving and safe driving support.”
A major new global-scale venture by China’s Internet giant Baidu aims to put artificial intelligence behind the wheel of fully autonomous vehicles on the road by 2020.
Regulatory considerations aside, the technical challenges are considerable, but like its U.S. counterpart Google, Baidu is pushing a big pile of chips onto its artificial intelligence (AI) bet.
Similar to Android, it has made much of the Apollo program’s code, which is completely open-source and available on Github.
The ecosystem, launched at the Baidu developers conference in Beijing in April, has enlisted at least 50 partners worldwide, with more anticipated.
A key participant is AutonomouStuff, which started out as an autonomous components supplier, but lately self-transformed into a full-fledged system integrator, with core GNSS and inertial capabilities drawn from manufacturers in the positioning, navigation and timing (PNT) industry.
Other Apollo partners include major Chinese auto manufacturers; tier 1 suppliers such as Bosch, Continental Automotive and ZF Friedrichshafen AG; components providers such as NVIDIA and Microsoft Cloud; mapper TomTom; and drive-sharing companies.
AutonomouStuff kitted out two standard Lincoln MKZ sedans for demonstration drives at the Beijing conference, with one technician completing each vehicle in about three hours — a task that would normally take a team of workers up to six weeks. The two Lincolns then drove simultaneously, driverless, around a test track.
The technology has been developed to be transferrable to other vehicles. Models already demonstrated include the Ford Fusion, a street-legal golf-cart-type electric vehicle called the Polaris GEM, and an off-road Ranger buggy platform.
AutonomousStuff presents the Apollo kit at the Baidu developer’s conference in April. (Photo: AutonomousStuff)
How It Works
Each car is modified by adding lasers, camera, radar sensors, GPS and inertial measurement unit (IMU), a drive-by-wire computer interface and computer engine.
Laser Sensors. A 64-beam lidar sensor on the roof gives a 360-degree field of vision for mapping, and lidar localization algorithms drawing on more than 2.2 million points of data per second generate a point cloud giving distance, angle and intensity values. This data is integrated with data from the GPS and IMU to generate a base map. Two smaller lidar sensors on the front corners of the vehicle provide obstacle detection and tracking.
Rotating four-beam laser sensors with 110-degree view and 200-meter range cover blind spots and facilitate fusing all raw data into one scan. Together, they detect other cars, trucks, bikes, pedestrians and background objects, and generate detailed data on their position, motion and shape. Distance and angular resolution data are used to offset camera and radar data.
Cameras. The platform uses two visible-light cameras mounted on the windshield, relying on laser sensors for nighttime operation. An image-processing chip provides real-time detection of lanes, vehicles and pedestrians, and measures dynamic distances from the vehicle.
Radar. Five radar sensors provide object detection, with various placements around the vehicle, and varying ranges and fields of view. Jointly, they provide a 360-degree bubble around the car.
Navigation. The kits provide GPS navigation combined with a tightly coupled IMU to provide data when GPS is not available.
Together, this provides accuracy to 2 cm, according to the company, when used with a real-time kinematic (RTK) base station; this obviously limits vehicle range. Another option is to use correction data from satellite-based correction services such as TerraStar, yielding achievable accuracies on the order of 4 cm.
Documentation
The aim of the Apollo project is to enable partners and customers to develop their own self-driving systems. The information supplied by Baidu encompasses a complete set of end-to-end instructions to convert a regular car to an autonomous-driving vehicle:
Software Instructions. A set of files that contain:
architecture of the classes and the files within each class.
code instructions for:
coordinate system
third-party libraries
calibration table.
Hardware Documents. Instructions to install the hardware and software for the vehicle include:
Vehicle:
industrial PC (IPC)
GPS
inertial measurement unit (IMU)
controller area network (CAN) card
hard drive
GPS antenna
GPS receiver
Software:
Ubuntu Linux
Apollo Linux kernel
Hardware reference guides:
vehicle
IPC
GPS
CAN card
https://youtu.be/eiSfP-Rn6n4
Manufacturers
The AutonomouStuff Apollo kit incorporates a choice, depending on user needs, of a selection of NovAtel GNSS receivers, including the ProPak6 GNSS receiver and the SPAN-IGM-A1 GNSS+IMU combined system, IMUs such as the IMU-ISA-100C incorporating Northrop-Grumman Litef GMBH’s inertial measurement technology, and antennas such as the GNSS-703-GGG-HV high vibration triple-frequency GPS, GLONASS, BeiDou, and Galileo antenna.
A 64-beam Velodyne lidar sensor and 16-beam HDL-16E provide laser data.
The onboard computer system is the AStuff Nebula embedded controller, an IPC powered by an Intel Skylake core i7-6700 CPU. The CAN card used for the IPC is the ESD CAN-PCIe/402.
Renesas Electronics, an automotive semiconductor supplier, is offering an advanced driving assistance system (ADAS) and automated driving platform: Renesas autonomy.
As the first rollout under the new platform, Renesas released the R-Car V3M high-performance image recognition system-on-chip (SoC), optimized primarily for use in smart camera applications, as well as surround view systems or even lidars.
The R-Car V3M SoC complies with the ISO26262 functional safety standard, delivers low-power hardware acceleration for vision processing and is equipped with a built-in image signal processor, freeing up board space and reducing system manufacturers’ costs.
The R-Car V3M SoC for smart camera applications is on the Renesas autonomy platform.
Autonomous vehicles will be required to sense the environment, control the vehicle and conduct synchronized communications with the cloud. A wide range of technologies is necessary to realize these functions, and each technology needs to maintain high reliability to synchronize without any flaw.
At the same time, these technologies are continuously advancing, which is why there is a growing demand for a total end-to-end solution.
Renesas autonomy delivers a comprehensive portfolio that includes scalable hardware, software and IP building blocks. It consists of Renesas’ sustainable and scalable SoC and micro-controller (MCU) roadmaps.
The platform also gives system manufacturers access to Renesas’ 195 technology partners in its ADAS R-Car Consortium, improving development efficiency and speeding time to market.
For the implementation of demanding algorithms, the Renesas autonomy platform provides system manufacturers the option to select the most suitable IP cores, including hardware accelerators, offering functional safety and flexibility within an architecture capable of the highest performance at the lowest power consumption.