May flip transportation industry more than Henry Ford did
The future rollout of the autonomous vehicle will disrupt transportation in way not seen since the automobile’s introduction. A new conference, Driverless, March 22-23 at the Crown Plaza Hotel-San Francisco Airport will explore future autonomous vehicle markets and policy; outline technological and cultural challenges; detail legal, cyber and privacy issues; and assess the investment opportunity in this potentially game-changing technology.
Silicon Valley — not traditionally an automotive center — is the new autonomous driving hotspot, as computer and software firms rapidly develop solutions and prototypes. Teaming with established automakers, new ventures and established Silicon Valley giants alike are testing systems worldwide for both passenger cars and commercial fleets. The Driverless conference takes advantage of its proximity to the computing capital to draw influential speakers and knowledgeable, motivated attendees in a high-level gathering.
Headshot: Alain Kornhauser
In the future panel, titled “The Way Ahead: The Road to Autonomous Driving,” industry experts assess the technological challenges facing full-blown autonomous driving. Who leads the effort to reduce component prices? What is the single most important decision that will unleash for ubiquitous rollout?
Panel members include: Adrian Pearmine, National Director for Smart Cities and Connected Vehicles, DKS Associates; Alain Kornhauser, Professor, Operations Research & Financial Engineering, Director, Transportation Program, Princeton University; Grant Mahler, Advanced Technology Engineer, BMW Group; Mike Jellen, President and COO, Velodyne; and Randall Iwasaki, Executive Director, Contra Costa Transportation Authority
Headshot: Alain Kornhauser
Kornhauser recently stated that autonomous vehicles will, like Ford’s Model T nearly a century ago, disrupt transportation. “Other disruptive technologies include intermodal container shipping, personal rapid transit, the rise of intelligent transportation systems and the Defense Advanced Research Projects Agency (DARPA) Challenge 10 years ago that flipped the industry from automated highways to the automated vehicle,” he said at the Transportation Research Board annual meeting. “It may flip the transportation industry more than Henry Ford did.”
Headshot: Mike Jellen
BMW, with its longstanding interest is assisted driving (see 2007 GPS World article, Pass/No Pass, is also a leader in autonomous driving. BMW Group, consisting of BMW, Rolls Royce, MINI and BMW Motorrad, recently powered the first self-driving car in China. Baidu, “the Chinese Google,” announced in December that its autonomous car successfully navigated a complicated route through Beijing. According to the company, the modified BMW 3-Series drove an 18.6-mile route around the capital city that included side streets as well as highways. The car made left, right, and u-turns, changed lanes, passed other cars, and merged onto and off the highway.
A Mapping Panel at the Driverless conference will feature HERE and San Francisco-based Civil Maps. Maps will be integral to any company’s strategy to introduce autonomous vehicles to the roadway.
Headshot: Randall Iwasaki
HERE recently unveiled its HD Live Map, an advanced cloud-based map asset. Ready to be deployed in connected vehicles in North America and Western Europe, HD Live Map creates a highly detailed and dynamic representation of the road environment, enabling a vehicle to effectively “see around corners” beyond the reach of its on-board sensors.
In 2015’s largest location-industry deal, three German luxury auto manufacturers, Audi, BMW and Daimler, purchased HERE for $2.8 billion from Nokia.
Civil Maps launched its lidar to GIS online platform at last year’s Esri User Conference. The software extracts and classifies features from 3D laser scans for export to popular GIS software. By leveraging proprietary artificial intelligence graph search powered by a supercomputer, Civil Maps says that its approach reduces turnaround times by 75 percent and yields more accurate maps than human-based processing, providing a streamlined approach to asset management and planning.
Other panels at the Driverless conference focus on:
Why Are Autonomous Vehicles Hot?
The Autonomous Vehicle Investment
Autonomous Vehicle Project Updates
Driverless Product Liability, Cyber Security and Privacy Issues
Driverless Conference Schedule. The full-day program on Wednesday, March 23, will feature 30 speakers from BMW Group, Peloton, USAA, Farmers Insurance, Velodyne, HERE and many others. The conference begins with an early evening reception on March 22, and ends with a similar reception on the 23rd, featuring exhibits from top companies.
Register here to attend. Driverless will be held at the Crown Plaza Hotel-San Francisco Airport, which has some of the lowest hotel rates in the Bay Area. Registration and hotel reservation rates go up March 9.
Sponsorships and displays are still available. Contact Global Technology Communications, (303) 369-3230, or email [email protected].
In his final State of the Union address, delivered Jan. 12, President Obama signaled his intent to invest in a 21st century transportation system.
U.S. Transportation Secretary Anthony Foxx has revealed part of the president’s proposal: a 10-year, nearly $4 billion investment to accelerate the development and adoption of safe vehicle automation through real-world pilot projects.
Secretary Foxx also announced that the U.S. Department of Transportation (DoT) is removing potential roadblocks to the integration of innovative, transformational automotive technology that can significantly improve safety, mobility and sustainability.
Secretary Foxx made the announcement at the North American International Auto Show in Detroit, where he was joined by leaders in technology, executives of traditional auto manufacturers, and newcomers to the industry.
“We are on the cusp of a new era in automotive technology with enormous potential to save lives, reduce greenhouse gas emissions, and transform mobility for the American people,” said Secretary Foxx. “Today’s actions and those we will pursue in the coming months will provide the foundation and the path forward for manufacturers, state officials, and consumers to use new technologies and achieve their full safety potential.”
The president’s FY17 budget proposal would provide nearly $4 billion over 10 years for pilot programs to test connected vehicle systems in designated corridors throughout the country, and work with industry leaders to ensure a common multistate framework for connected and autonomous vehicles.
Secretary Foxx also unveiled policy guidance that updates the National Highway Traffic Safety Administration’s (NHTSA) 2013 preliminary policy statement on autonomous vehicles. The new guidance, just released, reflects the reality that the widespread deployment of fully autonomous vehicles is now feasible.
“NHTSA is using all of its available tools to accelerate the deployment of technologies that can eliminate 94 percent of fatal crashes involving human error,” said NHTSA Administrator Mark Rosekind. “We will work with state partners toward creating a consistent national policy on these innovations, provide options now and into the future for manufacturers seeking to deploy autonomous vehicles, and keep our safety mission paramount at every stage.”
DOT is committing to the following milestones in 2016:
Within six months, NHTSA will work with industry and other stakeholders to develop guidance on the safe deployment and operation of autonomous vehicles, providing a common understanding of the performance characteristics necessary for fully autonomous vehicles and the testing and analysis methods needed to assess them.
Within six months, NHTSA will work with state partners, the American Association of Motor Vehicle Administrators, and other stakeholders to develop a model state policy on automated vehicles that offers a path to consistent national policy.
Secretary Foxx encouraged manufacturers to submit rule interpretation requests where appropriate to help enable technology innovation. For example, NHTSA responded to an interpretation request from BMW confirming that the company’s remote self-parking system meets federal safety standards. Click here to read this interpretation.
When interpretation authority is not sufficient, Secretary Foxx further encouraged manufacturers to submit requests for use of the agency’s exemption authority to allow the deployment of fully autonomous vehicles. Exemption authority allows NHTSA to enable the deployment of up to 2,500 vehicles for up to two years if the agency determines that an exemption would ease development of new safety features.
DOT and NHTSA will develop the new tools necessary for this new era of vehicle safety and mobility, and will consider seeking new authorities when they are necessary to ensure that fully autonomous vehicles, including those designed without a human driver in mind, are deployable in large numbers when they are demonstrated to provide an equivalent or higher level of safety than is now available.
In 2015, Secretary Foxx refocused the national dialogue about the future needs of our transportation infrastructure by releasing Beyond Traffic, a report examining the challenges facing America’s infrastructure over the next three decades. This draft framework has already influenced decisions by elected officials, planners and stakeholders nationwide, the DOT said.
In December 2015, the Secretary launched the Smart City Challenge, a national competition to implement bold, data-driven ideas that make transportation safer, easier and more reliable. He also worked to accelerate the DOT’s efforts to incorporate vehicle-to-vehicle (V2V) communication technology into new vehicles.
At CES in Las Vegas, HERE unveiled the HERE HD Live Map, an advanced cloud-based map asset commercially available for vehicles today. HERE is demonstrating HD Live Map at CES: Central Plaza, Booth #CP-2.
Ready to be deployed in connected vehicles in North America and Western Europe, HD Live Map creates a highly detailed and dynamic representation of the road environment, enabling a vehicle to effectively “see around corners” beyond the reach of its on-board sensors.
HD Live Map is an integrated offering, consisting of multiple layers of data delivered in a map-tile format. It is designed to enhance both Advanced Driver Assistance Systems (ADAS) and automated driving functionality, and therefore make driving more comfortable and enjoyable.
HD Live Map includes data which tends to have high permanency, such as lane level information; data which is temporal in nature, such as road construction, traffic and accidents; and analytics data, including speed profile information that informs the vehicle about how to drive based on actual human behavior data.
With highly automated driving set to become prevalent in the next few years, the immediate next step for the automotive industry is to capitalize on the new generation of ADAS that leverages wireless network connectivity and the cloud.
With HERE HD Live Map, automakers have the ability to enhance a vehicle’s ADAS functionality — such as adaptive cruise control, adaptive headlights and curve speed warnings — by giving it access to more accurate and more reliable near real-time content and contextual information about its environment. In doing so, the industry can help drivers build the prerequisite trust and familiarity they need to feel comfortable with increasing levels of vehicle automation.
“As we move towards higher levels of vehicle automation, drivers need to feel that their car is making the right decisions on their behalf,” Floris van de Klashorst, HERE’s vice president of automotive. “When it comes to trusting your car, having consistent real-time awareness of road conditions near and far is absolutely critical. With HD Live Map serving this need, we believe it will become the car industry’s most intelligent vehicle sensor.”
Self-maintaining map. HERE HD Live Map is the first map from HERE that is self-maintaining: through multiple modes of sensor aggregation and ingestion the vehicle’s map is updated and delivered in near real-time.
For example, if vehicle sensors detected a speed limit sign which is inconsistent with what is currently in the map, the map would update accordingly so that other vehicles driving approaching the same spot have the new, correct information. This is important for ADAS functionality such as adaptive cruise control.
Similarly, if a new lane closure was reported, the map would update accordingly so that other vehicles approaching the area can already prepare to switch lanes or alternatively re-route if traffic is heavy.
HERE HD Live Map delivers connected ADAS content via layered live tiles, with dynamic traffic flow data, real-time incident reporting and speed profile data derived from rich behavior information.
HD Live Map is also data-efficient, requiring a small data footprint, with new events able to be layered on the map without the need to update the whole map itself. The small file sizes within each live tile make the delivery of highly precise data much leaner, thus reducing bandwidth requirements.
In the near-term, HD Live Map utilizes a variety of data gathered and delivered by the HERE location platform to enhance the vehicle and the driver’s awareness of what’s happening on the road.
As vehicle automation increases in the future, HD Live Map is ready to serve as an agnostic location cloud, ingesting, aggregating and delivering in near real-time ever vaster quantities of data produced by a variety of sources, especially vehicle sensors. For example, HERE is exploring further enriching its platform with new sensor data from Audi, BMW and Mercedes-Benz vehicles, which would benefit all automakers deploying HD Live Map.
HERE has already been providing either parts or full specifications of HD Live Map for automated driving testing purposes to more than ten automotive companies. Many of those have taken advantage of HD Live Map data HERE is offering of specific stretches of open road in Silicon Valley and Michigan in the United States, as well as in France, Germany and Japan.
Now, with HD Live Map offered across key regions, HERE is able to support automakers seeking to widen and deepen their automated driving development efforts. In supporting larger testbeds, HERE intends to continue to refine HD Live Map together with automakers to ensure it is optimized for their needs today and tomorrow.
“Highly-detailed map data is not only very useful but a requirement for full-featured automated and autonomous driving. In the near term, highly-detailed map data will enhance the performance and benefits of current-generation driver assist technologies; over the longer term, they will enable more effective and efficient operation of vehicles altogether by drivers or self-driving cars. Adding a feedback loop to continually gather, update and share the latest road data will further elevate the technology’s potential,” analysts at IHS Automotive said.
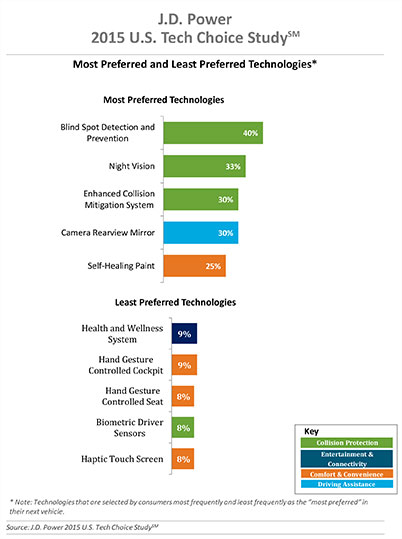
Three of the top five technologies consumers most prefer in their next vehicle are related to collision protection, according to a new J.D. Power 2015 U.S. Tech Choice Study.
Technologies that reduce the overall burden of driving and enhance the safety of the vehicle and its occupants receive the most consumer attention. Among the technologies consumers express most interest in having in their next vehicle are blind spot detection and prevention systems, night vision, and enhanced collision mitigation systems. These findings demonstrate growing customer acceptance towards the concept of the vehicle taking over critical functions such as braking and steering, which are the foundational building blocks leading to the possibility of fully-autonomous driving. The only non-collision protection technologies to crack the top five are camera rearview mirror, which falls into the driving assistance category, and self-healing paint, a comfort and convenience category.
In contrast, technologies in the navigation category have low preference across all vehicle price segments.
The inaugural study uses advanced statistical methodologies to measure preference for and perceived value of future and emerging technologies. A total of 59 advanced vehicle features are examined across six major categories: entertainment and connectivity; comfort and convenience; collision protection; driving assistance; navigation; and energy efficiency.
“There is a tremendous interest in collision protection technologies across all generations, which creates opportunities across the market,” said Kristin Kolodge, executive director of driver interaction and HMI research at J.D. Power. “In contrast, there is very little interest in energy efficiency technologies such as active shutter grille vents and solar glass roofs. Owners aren’t as enthusiastic about having these technologies in their next vehicle because of other efforts automakers are taking to improve fuel economy, as well as relatively low fuel prices at the present time.”
Gen Y Willing to Spend Most for Technology
Across all generations, price is the most important consideration for technology, accounting for 25.2 percent of importance. Gen Y is the least sensitive to technology price and shows a greater willingness to spend on new technologies than the other generations. Gen Y consumers, who have accounted for 27.7 percent of new-vehicle sales thus far in 2015 — second only to Boomers at 37.1 percent — are willing to spend an average of $3,703 on technology for their next vehicle. Gen X is willing to spend $3,007, while Boomers, who show the greatest price sensitivity, and Pre-Boomers are willing to spend only $2,416 and $2,067, respectively.
Importance of Technology
A certainty in the automotive domain is the impact the consumer electronics world has had upon it. From shifting consumer expectations of user interaction, to the rapid pace of technology introduction and importance of keeping software up to date, to the miniaturization and creation of cost-effective solutions for sensors and cameras, “the auto industry is standing on its head to keep technology up to consumers’ new standards,” said Kolodge. “Those who haven’t done so have seen negative feedback from consumers.”
Apple CarPlay vs. Google Android Auto
Smartphones play an increasingly vital role in everyday life, and vehicle technology is beginning to mirror what is offered on those devices, yet Apple CarPlay and Google Android Auto technologies consistently have among the lowest preference scores across all generations.
Consumer preferences for Apple CarPlay and Android Auto are uniquely dependent on which smartphone they own. Those who currently own a smartphone that is compatible with one of these technologies would choose the technology compatible with their phone at only a moderate rate, while those with the opposite brand of smartphone will rarely, if ever, choose that technology. For example, Android owners indicate that Apple CarPlay is “unacceptable” nearly twice as often as they indicate that solar glass roof is unacceptable.
Similarly, Apple phone owners indicate that Android Auto is “unacceptable” nearly twice as often as solar glass roof.
Kolodge noted that “lukewarm interest in these technologies that connect your phone to your vehicle coupled with consumer loyalty to their phone poses a unique challenge for automakers, which could be remedied by knowing their customers’ phone preferences.”
“Owners of luxury vehicles tend to own iOS devices, 1 so for many luxury brands, offering Apple CarPlay may be the best option, realizing they may be leaving out a portion of the market,” said Kolodge. “For nonluxury vehicle brands, the ownership of Apple and Android devices is much closer to an equal split. The solution for those brands may be to offer both operating systems and allow customers to select the option best suited for them.”
Key Findings
Full self-driving automation technology, part of the collision protection category, is designed to perform all safety-critical driving functions and monitor roadway conditions. The younger generations (Gen Y and Gen X) have substantially higher preference for the technology than the older generations (Boomer and Pre-Boomer). The Pre-Boomer generation, in contrast, has a greater preference for lower levels of automation, such as traffic jam assist.
Blind spot detection and prevention has high preference across the range of vehicle price segments. In contrast, reverse auto braking systems have low preference across the vehicle price segments and preference wanes as vehicle prices increase.
Advanced sensor technologies, such as hand gesture controlled seats, biometric driver sensors or haptic touch screens have low preference.
Technologies in the navigation category have low preference across all vehicle price segments.
The 2015 U.S. Tech Choice Study was fielded in January through March 2015 and is based on an online survey of more than 5,300 consumers who purchased/leased a new vehicle in the past five years.
The National Association of Broadcasters meeting in Las Vegas draws 100,000 attendees annually, making it one of the largest trade shows in the country. However, besides timing and some very niche markets, it has not been a big show for location companies. That is, until now, when NAB welcomed drone manufacturers, all of which embed GPS in their flying aircraft.
Kevin Dennehy
LAS VEGAS — Commercial drones, a growing market for location companies, was one of the most popular topics at the National Association of Broadcasters Show, held here April 13-16.
The market for drones has grown nearly five times in the last few years, said Eric Cheng of DJI, which uses GPS in its virtual positioning system that monitors and controls the aircraft. The company markets what they call “flying cameras” that look suspiciously like drones. “The market was initially hobbyists, but now some major broadcast players are buying the cameras,” Cheng said at the Showstoppers trade event the day before NAB.
Most of the drones offer GPS-based automatic flight stabilization technology. Some even offer a long-range wireless signal and low-latency video transmission.
Many of the drones are programmed so they don’t go higher than mandated FAA rules or go into restricted, no-fly aviation zones — and all use GPS to do this. Some of the drones even return to the user automatically when their batteries run low.
DJI drone with embedded GPS.
DJI offers three cameras for the drones. The high-end Phantom 3 Advanced offers 1080P HD video at 60 frames per second. The 1080P version costs $995.
In terms of privacy and government regulation, U.S. regulators are way behind Europe, Cheng said. “Other countries are way ahead of the [United States] in terms of working with drone companies,” he said. “In terms of privacy, the step ladder was the first tool for the invasion of privacy. They haven’t outlawed step ladders.”
The slow U.S. regulatory process has forced some manufacturers to go to other countries to test their drones, said Roger Sollenberger, 3D Robotics’ editorial director. “[U.S. regulations] have moved slowly here — despite the government knowing about worldwide drone rollouts. In Japan, they have been using drones to crop dust for 20 years,” he said.
Furuno’s Don Hanham with GNSS modules at NAB.
To signal increased interest in the commercial drone market, 3D Robotics raised $70 million dollars in funding, led by investor Qualcomm, Sollenberger said. The company, which partnered with action camera giant Go Pro, says its Solo drones can be used not only by broadcast companies, but for railroad track and building inspections.
As GPS World reported, Furuno Electric Co.’s latest multi-GNSS receiver module, GN-87, has been adopted for the new quadcopter Bebop Drone. The broadcast market has been a good one for company’s timing products, drone integration and even weather prediction, said Don Hanham, a Furuno sales and marketing consultant.
Furuno is marketing its Doppler Weather Radar System for broadcast. The system allows weather predictors to follow the development of short, localized rainstorms and extreme weather conditions.
Booz Allen Hamilton Releases Report on 2015 Automaker Priorities
The era of automotive connectivity, and subsequent heavy competition, is the focus of Booz Allen Hamilton’s new report, “Getting the Customer Experience Right: Auto Industry Priorities in 2015.”
The company says that automakers should consider six key priorities this year: deliver innovation in months, not model years; differentiate with new partnerships to catch customers’ attention; secure connectivity to reinforce a relationship of trust with customers; address the “so what” of connected cars; personalize the customer experience via the tremendous potential buried in data; and find and build the market for alternative fuel vehicles.
In terms of big connected vehicle technologies this year, Jon Allen, a principal with Booz, cites 4G pipe in GM and Audi vehicles and over-the-air updates by Ford and BMW, among others. “New parental controls in the Chevy Malibu report average speed and near misses while also preventing drivers from turning on the stereo until seatbelts are fastened. It’s easy to imagine this across vehicles, with parents receiving text messages in real time,” he said.
Allen said, in terms of vehicle connectivity, automakers must answer the “so what” to set themselves apart from the competition. “We have yet to see the seminal, game-changing connectivity plays. Most companies are still in the ‘features’ mindset, offering new à la carte enhancements,” he said. “They’re not yet articulating a top-down strategy for re-envisioning the customer experience with connectivity.”
One of the company’s six priorities concerns connected security, which has been a big industry issue since the recent release of the Markey Report, which focused on how vehicles can be hacked. “We have clients who get it. They’ve identified a senior leader to champion vehicle cyber security and backed them up with a cross-functional team that works closely with counterparts across the organization — in product engineering, supply chain, safety, privacy and IT,” Allen said. “Other OEMs are still formulating their approach. That said, there are pockets of cyber security across every organization, focused on implementing security controls on individual parts. The challenge is taking the next step —moving from this segmented, ‘assembly line approach’ to a more unified program that focuses on securing the complete vehicle ecosystem.”
Allen said the company has to speak honestly to customers and regulators about how to manage vehicle cyber security risk. “Industry leaders must prioritize their security approach to ensure that higher risk scenarios are addressed first, rather than try to take on all elements of the challenge at once,” he said.
Another priority addresses the long lead times, by automakers, to develop and roll out new features, which is a challenge, Allen said. “Consumer electronics, telecommunications and software companies are redefining the traditional industry boundaries that once distinguished them from OEMs. These companies focus on connectivity and services from the start of their product design process,” he said. “The key for automakers going forward is to continue learning from these new competitors, particularly around rethinking the vehicle lifecycle, connected product design, and managing vehicle software updates after purchase. In the near future, automakers will need different approaches to building and enhancing infotainment systems that can keep pace with customer demands.”
The marriage of autonomy and connectivity is a game-changer, Allen said. “It isn’t just about plugging vehicles in to the Internet of Things. Autonomy transforms transportation,” he said. “When a car drives you, it becomes a retail outlet, a personal assistant, even a trusted chaperone — that all depends on getting both autonomy and connectivity right.”
The rise of autonomous vehicles gets to the fundamental need for industry leaders to be willing to reimagine their product, Allen said. “Autonomous capabilities are not just about engineering a safer, more efficient, and more appealing mode of transportation. That’s important, but it’s really about a distinctly different product, one that creates a sustained, services-based relationship with the customer,” he said. “It will focus on the driving experience not just behind the wheel, but sitting comfortably inside of a self-driving vehicle. The connected, autonomous vehicle will change automotive for the better — and forever.”
Allen said his company is seeing OEMs look beyond their individual vehicles to see the emerging connected society that includes ride sharing, multi-modal transportation and connected cities. “The way we go from point A to point B will look and feel drastically different 25 years from now; many OEMs are beginning to accept the change and embrace the challenge,” he said.
Volvo Cars has a complete system solution that makes it possible to integrate self-driving cars into real traffic, with ordinary people in the driver’s seat. The automaker presented its planned system in an online press conference Feb. 19.
“We are entering uncharted territory in the field of autonomous driving,” said Peter Mertens, senior vice president of Research and Development, Volvo Car Group. “Taking the exciting step to a public pilot, with the ambition to enable ordinary people to sit behind the wheel in normal traffic on public roads, has never been done before.”
As the Drive Me project enters its second year, Volvo is moving toward its goal of placing 100 self-driving cars in the hands of customers on selected roads around Gothenburg by 2017. The public pilot — a collaboration between legislators, transport authorities, a major city and a vehicle manufacturer — is a central component of Volvo’s plan to achieve sustainable mobility and ensure a crash-free future.
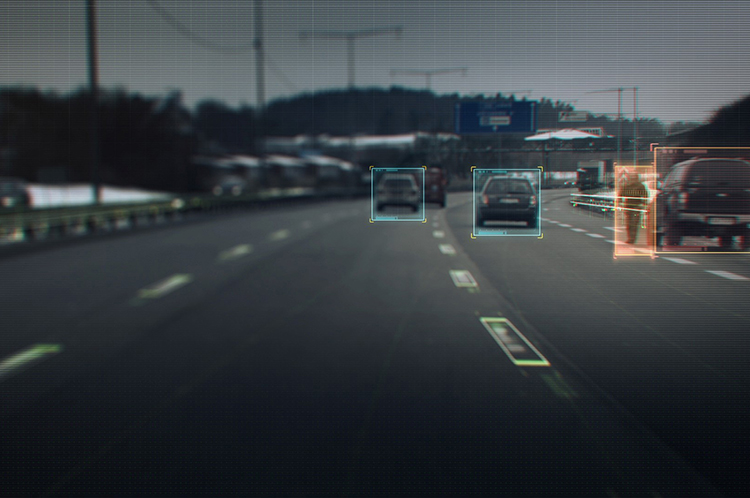
Early prototype cars are now being tested on the DriveMe route in and around Gothenburg, Sweden.
Volvo’s production-viable autonomous driving system is based on a complex network of sensors, cloud-based positioning systems and intelligent braking and steering technologies.
“Autonomous driving will fundamentally change the way we look at driving. In the future, you will be able to choose between autonomous and active driving,” Mertens said. “This transforms everyday commuting from lost time to quality time, opening up new opportunities for work and pleasure.”
Volvo’s autopilot system is designed to be reliable enough to allow the car to take over every aspect of driving in autonomous mode, Volvo said. The technology advances a crucial step beyond the automotive systems demonstrated so far since it includes fault-tolerant systems, the carmaker said.
“It is relatively easy to build and demonstrate a self-driving concept vehicle, but if you want to create an impact in the real world, you have to design and produce a complete system that will be safe, robust and affordable for ordinary customers,” said Erik Coelingh, technical specialist at Volvo Cars.
The main challenge is to design an autopilot that is robust for traffic scenarios as well as for technical faults that may occur. The driver can’t be expected to suddenly intervene in a critical situation. Initially, the cars will drive autonomously on selected roads with suitable conditions, such as without oncoming traffic, cyclists or pedestrians.
Volvo’s system generates exact positioning and a complete 360° view of the car’s surroundings through a combination of radars, cameras and laser sensors. A network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
“Making this complex system 99 percent reliable is not good enough. You need to get much closer to 100 percent before you can let self-driving cars mix with other road users in real-life traffic,” Coelingh said. “Here, we have a similar approach to that of the aircraft industry. Our fail-operational architecture includes backup systems that will ensure that the autopilot will continue to function safely if an element of the system were to become disabled.”
For example, the probability of a brake system failure is very small, but a self-driving vehicle needs a second independent system to brake the vehicle to a stop, because it is unlikely that the driver will be prepared to press the brake pedal.
On the road, the complete technology solution is designed to handle even the most complicated scenarios, from smooth commuting to heavy traffic and emergency situations, Volvo said. “Just as good drivers would, potentially critical situations are approached with sensible caution. In a real emergency, however, the car reacts faster than most humans,” Coelingh said.
When autonomous driving is no longer available — because of weather, technical malfunction or the end of the route has been reached — the driver is prompted by the system to take over again. If the driver is incapacitated for any reason and does not take over in time, the car will bring itself to a safe place to stop.
Volvo expects that autonomous driving could cut fuel consumption, improve traffic flow, and open up possibilities for urban planning and more cost-efficient investments in infrastructure.
“Developing a complete technological solution for self-driving cars is a major step. Once the public pilot is up and running, it will provide us with valuable knowledge about implementing self-driving cars in the traffic environment, and help us explore how they can contribute to sustainable mobility,” Coelingh said. “Our smart vehicles are a key part of the solution, but a broad societal approach is vital to offer sustainable personal mobility in the future. This unique cross-functional cooperation is the key to a successful implementation of self-driving vehicles.”
Drive Me system components:
The 76-GHz frequency-modulated, continuous wave radar is placed in the windscreen and combined with a camera to detect objects on the road. Four radars behind the front and rear bumpers locate objects in all directions. Long-range radars in the rear ensure a good rearward detection of vehicles in parallel lanes.
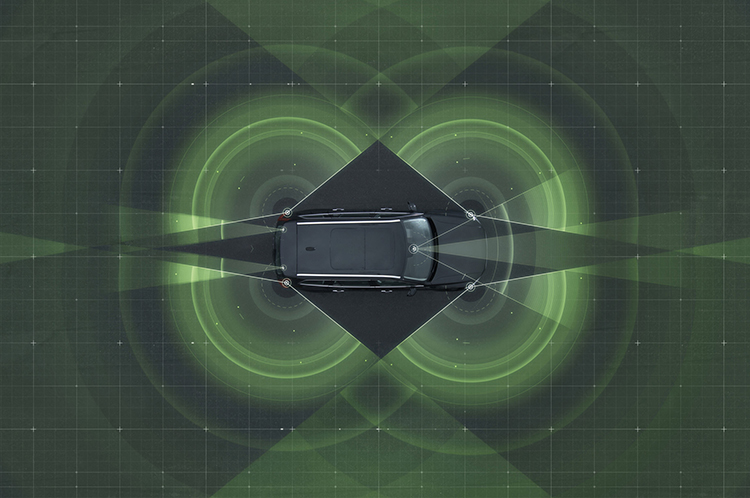
Sensor technologies. Volvo Cars is developing a holistic solution that generates exact positioning and a complete 360-degree view of the car’s surroundings. This is achieved by a combination of multiple radars, cameras and laser sensors. A redundant network of computers processes the information, generating a real-time map of moving and stationary objects in the environment.
Precise positioning is based on this surround information together with GPS and a high-definition 3D digital map that is continuously updated with real-time data. The system is reliable enough to work without requiring driver supervision.
Combined radar and camera. The combined 76-GHz frequency-modulated continuous wave radar and camera placed in the windscreen is the same as that in the new XC90. This system reads traffic signs and the road’s curvature and can detect objects on the road such as other road users.
Surround radars. Four radars behind the front and rear bumpers (one on each corner of the car) are able to locate objects in all directions. By sweeping both left and right, transmitting waves that bounce off signs, poles, and tunnels, they monitor a full 360-degree around the car.
360-degree surround vision. Four cameras monitor objects in close proximity to the vehicle. Two are under the outer rear-view mirrors, one is in the rear bumper and one is in the grille. Besides detecting objects at close range, these cameras monitor lane markings. The cameras have a high dynamic range and can handle quick changes in lightning conditions, such as when entering a tunnel.
Multiple beam laser scanner. This sensor system is placed in the front of the vehicle, below the air intake. The scanner can identify objects in front of the car and ensures very high angle resolution. It can also distinguish between objects. The laser sensor has a range of 150 meters for vehicles and covers a 140-degree field of view.
Trifocal camera. A trifocal camera placed behind the upper part of the windscreen is three cameras in one, providing a broad 140-degree view, a 45-degree view and a long-range, yet narrow, 34-degree view for improved depth perception and distant-object detection. The camera can spot suddenly appearing pedestrians and other unexpected road hazards.
Long-range radars. Two long-range radars placed in the rear bumper of the car ensure a good rearward field of view. This technology is useful when changing lanes because it can detect fast-moving vehicles approaching from far behind.
Ultrasonic sensors. Twelve ultrasonic sensors around the car are used to identify objects close to the vehicle and support autonomous driving at low speeds. The sensors are based on the technology used for current park-assist functions enhanced with advanced signal processing. This technology is useful for detecting unexpected situations, such as pedestrians or hazards on the road close to the car.
High-definition 3D digital map. A high-definition 3D digital map provide the vehicle with information about the surroundings, such as altitude, road curvature, number of lanes, geometry of tunnels, guard rails, signs, and exits. The position geometry is in many cases at centimeter level.
High-performance positioning. The high-performance GPS is one part of the positioning control that is enhanced by a combination of an advanced GPS, a three-degrees-of-freedom accelerometer and a three-degrees-of-freedom gyro. By matching the 360-degree image created by the multitude of sensors with the map image, the car will get the information about its position in relation to the surroundings.
By combining the information from the sensors and the map, the Drive Me car is able to choose the best course in real time, factoring in variables such as the curvature of the road, speed limit, temporary signs and other traffic.
Cloud services. The cloud service is connected to the traffic authorities’ control center. This ensures that the most up-to-date traffic information is always available. Control center operators also have the ability to tell the drivers to turn off the autonomous drive mode if necessary.
Start of the 550-mile piloted drive from Silicon Valley to Las Vegas: Ricky Hudi, Audi executive vice president electric/electronic development (left) and Ewald Gössmann, excecutive director Electronic Research Lab California (ERL), (third from right) drop the flag for the Audi A7 piloted driving concept car. Photo: Audi
An autonomous Audi A7 is driving itself to Las Vegas for this week’s 2015 Consumer Electronics Show. The Audi is making the 550-mile trip as journalists sit behind the wheel for 100-mile stretches with an Audi official in the passenger’s seat.
The car left Stanford, Calif., Jan. 5 and traversed real-world roads and traffic conditions on its way to Las Vegas.
The long-distance test drive of the Audi A7 piloted driving concept car is designed to show that unprecedented performance can be achieved with series production technology, Audi said in a statement.
“The test drive from the west coast of California to Las Vegas demonstrates our leadership role in piloted driving,” said Prof. Dr. Ulrich Hackenberg, Audi board member and head of technical development. The test drive in real world traffic and road conditions represents a joint effort by the Volkswagen Electronics Research Laboratory (ERL) und Volkswagen Group Research and Development, begins today in Stanford, CA. The Audi A7 piloted driving concept will drive more than 550 miles, approximately 900 kilometers.
The A7 piloted driving concept uses the latest technologically advanced systems developed by Audi. The concept relieves the driver of driving duties from 0 to 70 mph, or just over 110 km/h. The car, named “Jack” by the development team, can initiate lane changes and passing maneuvers. In addition, the A7 piloted driving concept accelerates and brakes independently. Before initiating a lane change to the left or the right, the vehicle adapts its speed to surrounding vehicles. If the speed and distance calculation is deemed safe, the vehicle initiates the lane change with precision and in a timely manner.
The piloted concept vehicle uses a combination of various sensors, many of which are close to production ready. The long range radar sensors of the adaptive cruise control (ACC) and the Audi side assist (ASA) keep watch of the front and rear of the vehicle. Two mid-range radar sensors at the front and rear respectively are aimed to the right and left to complete the 360 degree view. Laser scanners are mounted within the Singleframe grille and the rear bumper skirt. The scanners deliver redundant information to provide detailed recognition of static and dynamic objets during piloted driving. The technologies are production ready including their vehicle integration and cost structure for vehicle production in the near future. A new high-resolution 3D video camera, already integrated into the next-generation systems found in the new Q7, takes a wide-angle view out in front of the vehicle. Four small front and rear mounted cameras view closer surroundings. Navigation data is used for basic vehicle orientation.
Before the piloted driving system reaches its limitations, in city environments for example, the driver is requested to take control of the vehicle to ensure proper safety. Multiple warning signales work in unison: colored LEDs at the base of the windshield, signals in the driver information display, a Central Status Indicator (CSI), as well as a acoustic warning indicator requires the driver to retake control. Should the driver ignore the signals, the system activates the hazard lights and brings the car to a full stop while minimizing any risk. In most instances the vehicle is stopped on the right emergency lane.
The training for the jounalist test drivers taking part in the 550-mile trek took place several weeks ago at the Arizona Proving Grounds. Each journalist will drive approximately 100 miles using the piloted driving system. A trained Audi professional test driver will accompany the media from the passenger seat for added safety.
The upcoming Telematics Munich conference, scheduled for November 10-11 at the Hotel Dolce Munich, is considered Europe’s largest and most influential business conference and exhibition for the connected car industry.
More than 1,000 industry executives and 100 speakers are set to attend the conference, which has the theme “The Car Plugs into the Connected World: Auto Mobility Strategies for 2020.”
This year’s agenda covers these topics:
Personalized Connectivity Prevails — Context is king as data from changing driving environments sync with personal preferences to create a UX that bridges generational gaps.
Data Investments Pay Out —Collect. Analyze. Deliver. Harness connected car data to obtain real consumer and vehicle insights and generate new revenues.
Move with the M2M Hype Curve —Align the tech of other connected industries (such as home automation and health) with the car to draw closer to a totally connected lifestyle.
Tech Titans Enter The Connected Car —Discuss the business model and CRM repercussions for entrenched telematics players as CE giants move into the ecosystem.
Auto Mobility Towards 2020 — Debate OEM commitments, V2X tech, and smart cities today to plot the path of automated vehicle technology of tomorrow.
The Institute of Navigation (ION) announces that South Miami Senior High School won the 2012 ION Mini-Urban Challenge held May 26 at the Smithsonian’s Lemelson Center for the Study of Invention and Innovation at the National Museum of American History.
Sponsored by the Institute of Navigation and the Air Force Research Laboratory (AFRL), the ION Mini-Urban Challenge is a national event that challenges high school students to work in teams to design and operate a robotic car, built from a LEGO Mindstorms NXT kit, that can accurately navigate autonomously through a model city. The competition is intended to expose students to the areas of science, technology, engineering, and mathematics (STEM).
More than 600 students from 66 high schools competed in five regional competitions held in Louisiana, Florida, California, Washington, D.C., and Ohio. First- and second-place winners from each of the five ION Mini-Urban Challenge Regional Competitions were invited to compete in the National Competition. Each team was judged based on their cumulative scores earned throughout the competition phases: 30% of the total score was based on a technical presentation, and 70% of the total score was based on the course navigation portion of the competition.
First place was awarded to the “Legotron” Team from South Miami Senior High School, Miami, Florida. The first place prize included $2,500 for the winner’s school and a trophy. Second place was awarded to the “305” Team, also from South Miami Senior High School. The second place prize included $1,000 for the winner’s school and a trophy. Third place was awarded to Perry High School, Perry, Ohio. The third place prize included $500 for the winner’s school and a trophy. Best in Show went to the “Legotron” Team from South Miami Senior High School and Best Presentation went to West High School, Torrance, California, who won based on their ambulance robot, complete with working siren.
Sponsors for the 2012 ION Mini-Urban Challenge included: the Air Force Research Laboratory Munitions Directorate, The Smithsonian’s Lemelson Center for the Study of Invention and Innovation at the National Museum of American History, Boeing, John Deere, the Joint Services Data Exchange (JSDE), Northrop Grumman, Raytheon, the Consortium of Ohio Universities on Navigation & Timing (COUNT), CSR, JAVAD GNSS, Overlook Systems, The University of Calgary, Schulich School of Engineering, UrsaNav, and Lego.
Learning how to control a car as a race driver does, at its very limits of handling, can ultimately assist ordinary drivers who enter a turn too quickly or are driving on a wet road and don’t realize when they need to brake. DGPS and inertial sensors drive feedback and feedforward speed controllers on a twisting test track to the top of Pikes Peak.
Stanford professor Chris Gerdes and his Dynamic Design Lab have outfitted and trained a white Audi to roar up the Pikes Peak International Hill Climb, a 12.5-mile racecourse to the top of the 14,110-foot Rocky Mountain summit.
Without a driver.
Officially known as the Autonomous Audi TTS Pikes Peak, the car has been nicknamed Shelley by its crew, in honor of Michele Mouton, the first woman to win the Hill Climb, in 1984, also in an Audi.
The team of graduate and Ph.D. students and Volkswagen’s Palo Alto research lab have spent two years conceptualizing and modifying the car to make the solo climb. They have just returned from tests of the car’s DGPS and other sensors on the course. International [human] racers competed on June 30, with the fastest just missing the course record of 10 minutes, 1.408 seconds, established in 2007, by a mere 10.082 seconds. That’s an average speed of 75 miles per hour over a course with 156 turns, many of them hairpins, an elevation gain of 4,721 feet, and both paved and gravel surfaces. Speeds at the Pikes Peak Hill Climb, often described by drivers as racing against the mountain more than other vehicles, top out around 165 miles per hour.
Shelley, not specifically built as a racecar, does not have the horsepower to hit that speed, but she aims for respectable rates all the same. “We are ultimately going for the fastest time we can get in a TTS and hope to establish that range in September and shoot for it in 2011,” wrote Gerdes from the mountain.
Safety the Goal. The team’s work is a variation on one theme: make Shelley drive faster, smarter — and safer.
“We believe that if we can learn how to control a car at its very limits of handling,” Gerdes said, “then we can also help ordinary drivers who enter a turn too quickly or are driving on a wet road and don’t realize when they need to brake. That’s ultimately where we hope this goes: safety systems.”
“Average drivers sometimes end up involved in road accidents due to their inability to control a vehicle at its limits,” Gerdes and Krisada “Mick” Kritayakirana wrote in a 2009 paper, from which the following results and figures are drawn, “yet racecar drivers routinely operate a vehicle at its limits without losing control. The difference could come from two key characteristics that racecar drivers have acquired.
“First, a racecar driver has the ability to estimate the friction between the tire and the road surface. Second, a racecar driver can utilize all of the actuators to control the vehicle at its limits, such as using the throttle and brakes to steer the vehicle, which could be counterintuitive to a typical driver. If a controller could imitate a racecar driver, perhaps this same concept could be applied to a vehicle safety system to assist drivers when they are on the verge of losing control. The controller could utilize every actuator to assist the driver, and real-time friction estimation could help predict the control authority that each actuator has. The goal of this research is to create a controller that captures these two key characteristics of a racecar driver.”
Feedforward, Feedback. Before entering a corner, a racecar driver anticipates the speed and steering angle that he or she would use. Similarly, in the Gerdes/Kritayakirana research, a feedforward controller is used to predict the speed and steering commands. While cornering, a racecar driver adjusts actuator commands (steering, throttle, and brake) to cope with any disturbances or driver’s perception mismatches (modeling errors). A feedback controller is designed to imitate a racecar driver making corrections during cornering. As a consequence, the desired steering and speed commands are calculated from the sum of feedforward and feedback controllers.
Robustness Tests. At Stanford, preliminary testing of Shelley’s control systems on the student-built P1 by-wire research vehicle provided a proof of concept. As with Shelley, P1’s DGPS and inertial sensors determine path-tracking errors that can be used to implement the steering feedback controller. A large parking lot with gravel over asphalt provided the ideal proving grounds for these tests. The inconsistent surface provided varying friction in the range of 0.4 to 0.6 and therefore presented a control challenge. The steering control had to be robust enough to ensure that this variation did not result in instability and the vehicle spinning.
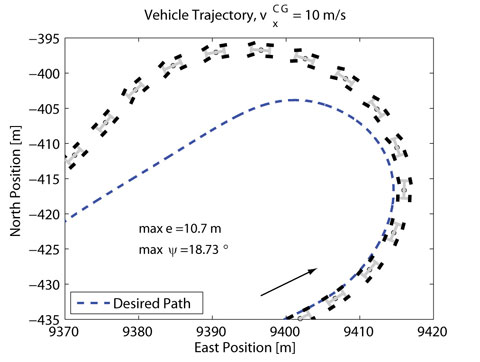
The vehicle trajectory in Figure 1 shows performance of the steering feedback tested in isolation with an arbitrarily chosen constant accelerator input. Because the vehicle enters the curve much faster than the friction between the tire and the road can support, large deviations from the desired path (in this particular case, a maximum lateral error of 10.7 meters, and maximum heading error of 18.73 degrees) occur.
Figure 1. Vehicle trajectory with feedback steering only.
Although it swings wide of the desired path, P1 remains stable and does not spin out. The ability to maintain control of the car even when there is a misjudgment in the friction conditions is vitally important to both the Pikes Peak climb and future safety systems.
Demonstrating the robustness of the steering control both analytically and experimentally on P1 gave the team confidence to use it as a central part of Shelley’s control logic.
Combined Controllers. The current control scheme running on Shelley adds the feedforward steering and both feedforward and feedback speed control elements to the simple steering controller demonstrated in Figure 1.
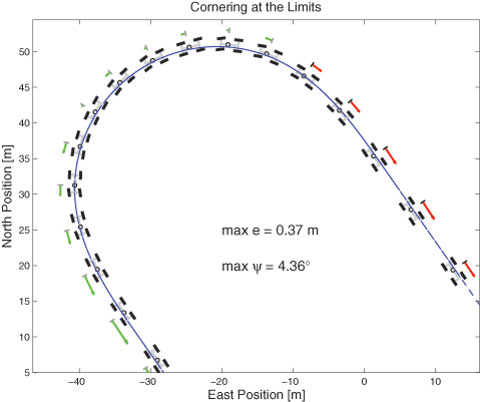
This combination can track the desired path around the corner quite closely, as shown by the trajectory in Figure 2. This plot shows the performance on a rough dirt track with a friction coefficient again between 0.4 and 0.6 and therefore a maximum possible acceleration of between 4 and 6 meters/second2.
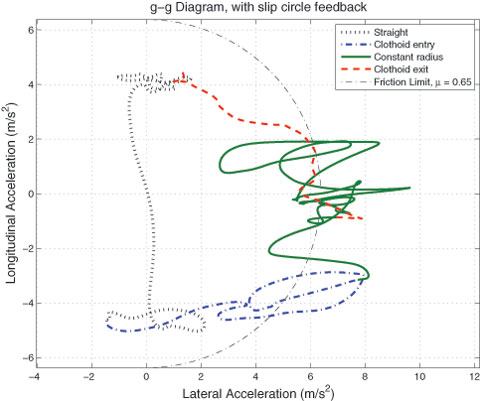
Figure 2. Latest result of TTS on Santa Clara fairground track; arrows indicate amount of vehicle acceleration (in green) or braking (in red).Figure 3. g-g diagram plots longitudinal and lateral acceleration, from tests on a different track, with friction on this surface (.65) somewhat higher than discussed in the text (0.4–0.6).
To demonstrate that Shelley is operating at the limits of friction, a g-g diagram is depicted in Figure 3. These diagrams, which are typically used to evaluate racecar driver performance, plot the longitudinal and lateral acceleration of the vehicle. An expert driver will achieve the maximum possible longitudinal acceleration in braking and the maximum lateral acceleration in cornering.
In transition between braking and cornering, the best drivers will use all available friction, giving the ideal curve a roughly circular shape. The g-g diagram for this test illustrates that Shelley continually operates at the limits of friction. As a result, the curve bears some resemblance to the behavior of an expert racecar driver. More precise comparisons with expert drivers driving the same course are planned for the future.
Shelley at rest as crew prepares DGPS base station and checks onboard computer.
A Rich Legacy
Shelley follows in the tracks of other Stanford robot cars such Junior, an autonomous Volkswagen Passat. “Junior was a perceptual challenge,” Gerdes recalled. Junior and its predecessor Stanley, under the direction of Stanford professor Sebastian Thrun, were designed to perceive the environments around them, understand signs and recognize the driving situation of nearby vehicles, then logically respond to what they saw. Both competed in the Defense Advanced Research Projects Agency (DARPA) Grand Challenges.
Stanley and Junior, while possessing a much higher level of autonomy than Shelley and able to handle a range of environments, crept along at speeds well below the average driver’s comfort level, and placed little emphasis on driving dynamics. Shelley is highly focused on the dynamics issue.
“They’re all autonomous vehicles to some extent, but they have very different scopes, and I guess you could say, very different personalities as well,” Gerdes said.
“Can we go around turns as fast as possible, brake at the last possible minute, and accelerate out as soon as we’re steering out of a turn?” Gerdes asked. This became the group’s goal for Shelley.
Rami Hindiyeh had the task of crafting Shelley’s judgment. He writes software designed to mimic a rally car driver’s mind with a series of mathematical analyses that predict how the car should control itself in different situations. He looked at “ways to slide Shelley through turns like a rally car racer would.” Mick Kritayakirana is in charge of the autonomous racing controller to govern Shelley “at the limits, like racecar drivers race on the pavement.”
The Audi TTS’s steering, brakes, gears, and throttle are all controlled electronically, so Shelley required few mechanical modifications to integrate her systems into a controller area network that allows the vehicle’s components to communicate. The network enables the team to individually switch each component from manual to automatic so the team can test its reliability.
Shelley’s most critical components are GPS antennas and receivers coupled to an inertial system that determines speed and sideways motion. The INS controls the car’s direction during GPS signal interruptions, giving up to 200Hz updates on car position.
While the combined effects of Shelley’s systems are complex, the computer in the trunk that processes the data isn’t any faster than one you could buy a decade ago. Most calculations are done separately within the GPS and in the vehicle electronics. “We don’t need a whole lot of computational power to run the driving and racing algorithms,” Gerdes said.
“We have to spend a lot of time trying to make the car listen to what we command,” Kritayakirana added.
The Pikes Peak course was plotted on a GPS map for the car to follow, and based on that information and how much friction the computer predicts, it has an idea of how fast it can take turns at different angles and with varying road surfaces. The computer refines its speed and steering with each test turn to figure out what Gerdes calls Shelley’s “braking point.”
“When a human is driving a car and they see a turn coming up, they can, at a constant rate, so to speak, just try to turn the wheel towards that curve preemptively,” said team member David Hoffert. “And that works because roads are designed with certain mathematical geometric properties that if you do that, [you] follow the path.”
As the team nears the finish line, members continue to closely collaborate with Volkswagen’s research group. They have weekly meetings “where we talk about our current status and evaluate the hardware and software,” said Marcial Hernandez, senior research engineer at Volkswagen. The team aims to have Shelley back on the mountain in September. “We’d really like to send the car pretty close to its capability, certainly much, much faster than people would be comfortable driving unless they were highly skilled racecar drivers,” Gerdes said.
Pre-Race Tests
The team’s trip to Pikes Peak in July enabled the group to experience the International Hill Climb and watch some of the best racers in the world tackle the mountain. Following the hill climb, the project team devoted a couple of days to gathering GPS data on Pikes Peak. This included scouting locations for base stations to broadcast DGPS corrections and determining the availability of corrections at different points along the highway. In addition, the team took measurements of the road boundaries and profiles for developing digital maps of the course.
Line-of-sight issues for the GPS base stations and interference of other voice and DGPS users on the broadcast frequencies used by the team present challenges for racing on the mountain. The group made significant progress on these issues during the June experiments and has scheduled additional GPS testing for July. Travis Wolgram, a test engineer at the Association of American Railroads in Pueblo, Colorado, joined the group to discuss using the High Accuracy National DGPS system in future testing. With a prototype base station now operational at the Federal Railroad Administration’s Transportation Technology Center, 50 miles southeast of Pikes Peak, there is a unique opportunity to harness these corrections for the project.
Shelley should return to Pikes Peak in September, with the goal of driving the entire course slowly and selected segments at full race speed. With proper analysis of this data during the winter months when snow is on the mountain, the team should be prepared to make a full run at race speed in 2011.
Manufacturers
The Autonomous Audi TTS Pikes Peak uses an Applanix POS LV420 GPS and inertial measurement unit, with OmniStar HP service for 10-centimeter or better accuracy, Trimble SPS851 GPS receiver for the base station, two Trimble HPB450 transmitters for RTK signal transmission from the base station, and a Pacific Crest ADL Vantage receiver in the vehicle to receive the RTK corrections.
Tyler Brown is a Stanford undergraduate. An earlier version of this story appeared in the Stanford Daily; it has been updated and expanded here by the Dynamic Design Lab and GPS World staff.